1.本实用新型涉及电芯组装领域,尤其涉及一种电芯上下胶壳焊接机构。
背景技术:
2.随着科学技术的进步,极大地拉动了工业链产业的发展,工业产品的市场需求越来越大,从而促使各地的制造工厂越来越多,以满足日益增长的市场需求。科学技术的不断进步对于电池生产制造业的影响也十分巨大,各种设备越来越多样化,移动手机、平板电脑、笔记本电脑等通信产品不断的更新换代,但它们都有一个共同的发展趋势是轻量化和方便移动,因此,为设备提供电源的电池扮演着越来越重要的角色,市场的需求量也越来越大。电池包括下胶壳、电芯及上胶壳,先将电芯安放于下胶壳上,再把上胶壳安放于下胶壳上,从而通过下胶壳和上胶壳包覆电芯,最后通过焊接的方式把通过下胶壳和上胶壳焊接在一起。目前,上胶壳和下胶壳的焊接主要是人工焊接,人工焊接上胶壳和下胶壳不但电池质量难以保证,而且劳动强度大,工作效率低,生产成本高,降低了企业的市场竞争力,人工焊接的方式已远不能满足生产发展的需要。
技术实现要素:
3.本实用新型的目的在于提供一种可节约人工成本且提高焊接效率的电芯上下胶壳焊接机构。
4.为实现上述目的,本实用新型提供了一种电芯上下胶壳焊接机构,包括机架、转动驱动机构、转盘、夹具、第一上料机械手、第二上料机械手、顶升机构及超声波焊接机构,所述转动驱动机构设置于所述机架上,所述转盘设置于所述转动驱动机构上,所述转动驱动机构可驱动所述转盘转动,两所述夹具呈间隔且相对地设置于所述转盘上;所述第一上料机械手和所述第二上料机械手设置于所述机架上并位于所述转盘的一侧,所述第一上料机械手用于将下胶壳与电芯取放至与其同侧的所述夹具上,所述第二上料机械手用于将上胶壳取放至与其同侧的所述夹具上,借由所述第一上料机械手和所述第二上料机械手将所述下胶壳、所述电芯及所述上胶壳三者组装形成初始组装件;所述顶升机构和所述超声波焊接机构设置于所述机架上并位于所述转盘的另一侧,所述顶升机构位于所述转盘的下方,所述超声波焊接机构位于所述转盘的上方,所述顶升机构用于将与其同侧的所述夹具顶升脱离所述转盘,所述超声波焊接机构用于对位于顶升后的所述夹具上的所述初始组装件进行焊接。
5.较佳地,所述夹具包括定位座、第一对位件、第二对位件、第一顶推机构及第二顶推机构,所述定位座用于供所述下胶壳、所述电芯及所述上胶壳三者叠放并形成所述初始组装件,所述第一对位件和所述第二对位件呈垂直地设置于所述定位座上,所述第一顶推机构和所述第二顶推机构分别设置于所述定位座上,所述第一顶推机构与所述第一对位件呈相对设置,所述第二顶推机构与所述第二对位件呈相对设置;借由所述第一顶推机构将所述定位座上的所述初始组装件顶推至所述第一对位件,以及所述第二顶推机构将所述定
位座上的所述初始组装件顶推至所述第二对位件,从而夹紧定位所述初始组装件。
6.较佳地,所述电芯上下胶壳焊接机构还包括搬运机械手,所述搬运机械手设置于所述机架上,所述第一上料机械手具有呈间隔设置的第一取放部及第二取放部,所述第一取放部用于将下胶壳与电芯取放至与其同侧的所述夹具上,所述第二取放部用于将与其同侧的所述夹具上的所述初始组装件取放至所述搬运机械手,所述搬运机械手用于将所述初始组装件搬运至下一工位。
7.较佳地,所述第一上料机械手包括平移移动驱动机构、连接板、第一升降驱动机构及第二升降驱动机构,所述平移移动驱动机构设置于所述机架上,所述连接板设置于所述平移移动驱动机构上,所述第一升降驱动机构和所述第二升降驱动机构分别设置于所述连接板上,所述第一取放部设置于所述第一升降驱动机构上,所述第二取放部设置于所述第二升降驱动机构上。
8.较佳地,所述电芯上下胶壳焊接机构还包括扫码机构,所述扫码机构设置于所述机架上,所述扫码机构用于对所述下胶壳进行扫码;借由所述第一取放部先将所述下胶壳连同所述电芯一起搬运至与所述扫码机构对应的位置处,再将所述下胶壳连同所述电芯一起搬运至所述夹具上。
9.较佳地,所述电芯上下胶壳焊接机构还包括下料机械手,所述下料机械手设置于所述机架上并位于所述搬运机械手的一侧,借由所述搬运机械手用于将所述初始组装件搬运至与所述下料机械手对应的位置处,使得所述下料机械手将所述搬运机械手上的初始组装件搬运下料。
10.较佳地,所述电芯上下胶壳焊接机构还包括不良品输送线,所述不良品输送线设置于所述机架上,所述不良品输送线用于输送未焊接的所述初始组装件;所述下料机械手可将所述搬运机械手上的未焊接的所述初始组装件搬运至所述不良品输送线。
11.较佳地,所述顶升机构包括顶升驱动机构及顶升件,所述顶升驱动机构设置于所述机架上,所述顶升驱动机构与所述顶升件连接,所述转盘设有位于所述夹具下方的开口,借由所述顶升驱动机构驱动所述顶升件穿过所述开口,以顶升所述夹具。
12.较佳地,所述顶升驱动机构与所述顶升件之间设有用于调节所述顶升件的平面度的平面度调节组件。
13.较佳地,所述平面度调节组件包括第一连接件、螺栓、第二连接件及弹性件,所述第一连接件与所述顶升驱动机构的输出端连接,若干个所述弹性件分别设置于所述第一连接件与所述第二连接件之间,所述第二连接件位于所述第一连接件的上方,若干个所述螺栓将所述第二连接件与所述第一连接件锁定在一起,所述顶升件固定于所述第二连接件的上方;借由松拧或锁紧所述螺栓,以释放或压紧所述弹性件,从而调节所述顶升件的平面度。
14.与现有技术相比,本实用新型的电芯上下胶壳焊接机构通过转动驱动机构驱动转盘转动,使得转盘一侧的夹具与第一上料机械手、第二上料机械手对应,转盘另一侧的夹具与顶升机构、超声波焊接机构对应,使得第一上料机械手和第二上料机械手在对其中一个夹具上料的同时,顶升机构和超声波焊接机构对另一个夹具上的初始组装件进行顶升和焊接,如此快速高效地同步进行自动化上料和自动化焊接,极大地节约人工成本,并提高焊接效率。
附图说明
15.图1是本实用新型的电芯上下胶壳焊接机构的立体结构示意图。
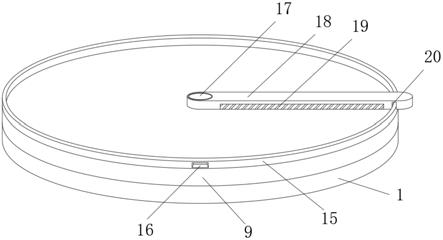
16.图2是本实用新型的转盘位置处的结构示意图。
17.图3是本实用新型的夹具的结构示意图。
18.图4是本实用新型的顶升机构的结构示意图。
19.图5是本实用新型的平面度调节组件的分解图。
20.图6是本实用新型的第一上料机械手的结构示意图。
21.图7是本实用新型的搬运机械手的结构示意图。
具体实施方式
22.为了详细说明本实用新型的技术内容、构造特征,以下结合实施方式并配合附图作进一步说明。
23.请参阅图1及图2,本实用新型的电芯上下胶壳焊接机构100包括机架1、转动驱动机构2、转盘21、夹具3、第一上料机械手4、第二上料机械手5、顶升机构6及超声波焊接机构7,所述转动驱动机构2设置于所述机架1上,所述转盘21设置于所述转动驱动机构2上,所述转动驱动机构2可驱动所述转盘21转动,两所述夹具3呈间隔且相对地设置于所述转盘21上;所述第一上料机械手4和所述第二上料机械手5设置于所述机架1上并位于所述转盘21的一侧,所述第一上料机械手4用于将下胶壳与电芯取放至与其同侧的所述夹具3上,所述第二上料机械手5用于将上胶壳取放至与其同侧的所述夹具3上,借由所述第一上料机械手4和所述第二上料机械手5将所述下胶壳、所述电芯及所述上胶壳三者组装形成初始组装件;所述顶升机构6和所述超声波焊接机构7设置于所述机架1上并位于所述转盘21的另一侧,所述顶升机构6位于所述转盘21的下方,所述超声波焊接机构7位于所述转盘21的上方,所述顶升机构6用于将与其同侧的所述夹具3顶升脱离所述转盘21,所述超声波焊接机构7用于对位于顶升后的所述夹具3上的所述初始组装件进行焊接。
24.请参阅图2及图3,所述夹具3包括定位座31、第一对位件32、第二对位件33、第一顶推机构34及第二顶推机构35,所述定位座31用于供所述下胶壳、所述电芯及所述上胶壳三者叠放并形成所述初始组装件,所述第一对位件32和所述第二对位件33呈垂直地设置于所述定位座31上,所述第一顶推机构34和所述第二顶推机构35分别设置于所述定位座31上,所述第一顶推机构34与所述第一对位件32呈相对设置,所述第二顶推机构35与所述第二对位件33呈相对设置;借由所述第一顶推机构34将所述定位座31上的所述初始组装件顶推至所述第一对位件32,以及所述第二顶推机构35将所述定位座31上的所述初始组装件顶推至所述第二对位件33,从而夹紧定位所述初始组装件。具体地,所述第一顶推机构34包括第一顶推气缸341及第一顶推件342,所述第一顶推气缸341设置于所述定位座31上,所述第一顶推气缸341的输出端与所述第一顶推件342连接,所述第一顶推气缸341可驱动所述第一顶推件342移动顶推所述初始组装件;所述第二顶推机构35包括第二顶推气缸351及第二顶推件352,所述第二顶推气缸351设置于所述定位座31上,所述第二顶推气缸351的输出端与所述第二顶推件352连接,所述第二顶推气缸351可驱动所述第二顶推件352移动顶推所述初始组装件。进一步地,所述第一对位件32设有供所述初始组装件的导线通过的凹槽321。通过设置凹槽321来避让初始组装件的导线,保证初始组装件的导线的平整性。
25.请参阅图1、图6及图7,本实用新型的电芯上下胶壳焊接机构100还包括搬运机械手81,所述搬运机械手81设置于所述机架1上,所述第一上料机械手4具有呈间隔设置的第一取放部41及第二取放部42,所述第一取放部41用于将下胶壳与电芯取放至与其同侧的所述夹具3上,所述第二取放部42用于将与其同侧的所述夹具3上的所述初始组装件取放至所述搬运机械手81,所述搬运机械手81用于将所述初始组装件搬运至下一工位。第一取放部41及第二取放部42可采用现有的真空吸附组件,但不以此为限。具体地,所述第一上料机械手4包括平移移动驱动机构43、连接板44、第一升降驱动机构45及第二升降驱动机构46,所述平移移动驱动机构43设置于所述机架1上,所述连接板44设置于所述平移移动驱动机构43上,所述第一升降驱动机构45和所述第二升降驱动机构46分别设置于所述连接板44上,所述第一取放部41设置于所述第一升降驱动机构45上,所述第二取放部42设置于所述第二升降驱动机构46上。平移移动驱动机构43可驱动第一取放部41及第二取放部42平移,第一升降驱动机构45可驱动第一取放部41升降,第二升降驱动机构46可驱动第二取放部42升降。但搬运机械手81的结构不以此为限。
26.请参阅图1,本实用新型的电芯上下胶壳焊接机构100还包括扫码机构9,所述扫码机构9设置于所述机架1上,所述扫码机构9用于对所述下胶壳进行扫码;借由所述第一取放部41先将所述下胶壳连同所述电芯一起搬运至与所述扫码机构9对应的位置处,再将所述下胶壳连同所述电芯一起搬运至所述夹具3上。通过扫码机构9对下胶壳进行扫码,以便于产品跟踪和溯源。当扫码机构9对所述下胶壳进行扫码ng时,所述超声波焊接机构7不对该下胶壳的初始组装件焊接,此时的初始组装件也为不良的初始组装件。当扫码机构9对所述下胶壳进行扫码合格时,所述超声波焊接机构7对该下胶壳的初始组装件焊接,此时的初始组装件为良品。
27.请继续参阅图1,本实用新型的电芯上下胶壳焊接机构100还包括下料机械手82,所述下料机械手82设置于所述机架1上并位于所述搬运机械手81的一侧,借由所述搬运机械手81用于将所述初始组装件搬运至与所述下料机械手82对应的位置处,使得所述下料机械手82将所述搬运机械手81上的初始组装件搬运下料。进一步地,本实用新型的电芯上下胶壳焊接机构100还包括不良品输送线83,所述不良品输送线83设置于所述机架1上,所述不良品输送线83用于输送未焊接的所述初始组装件;所述下料机械手82可将所述搬运机械手81上的未焊接的所述初始组装件搬运至所述不良品输送线83,所述下料机械手82可将已焊接的所述初始组装件搬运至其他工位进行下料。
28.请参阅图2、图4及图5,所述顶升机构6包括顶升驱动机构61及顶升件62,所述顶升驱动机构61设置于所述机架1上,所述顶升驱动机构61与所述顶升件62连接,所述转盘21设有位于所述夹具3下方的开口,借由所述顶升驱动机构61驱动所述顶升件62穿过所述开口,以顶升所述夹具3。在本实施例中,所述顶升驱动机构61与所述顶升件62之间设有用于调节所述顶升件62的平面度的平面度调节组件63。具体地,所述平面度调节组件63包括第一连接件631、螺栓632、第二连接件633及弹性件634,所述第一连接件631与所述顶升驱动机构61的输出端连接,若干个所述弹性件634分别设置于所述第一连接件631与所述第二连接件633之间,所述第二连接件633位于所述第一连接件631的上方,若干个所述螺栓632将所述第二连接件633与所述第一连接件631锁定在一起,所述顶升件62固定于所述第二连接件633的上方;借由松拧或锁紧所述螺栓632,以释放或压紧所述弹性件634,从而调节第二连
接件633的平面度,进而调节所述顶升件62的平面度。通过对顶升件62的平面度进行微调,保证顶升件62的抵顶面水平,从而保证位于夹具3上的初始组装件水平,使得超声波焊接机构7可精准地对所述初始组装件进行焊接,保证焊接质量。但平面度调节组件63的结构不以此为限,举例而言,在其他实施例中,第二连接件633可枢接于第一连接件上,通过在第一连接件与第二连接件633设置若干个升降抵顶机构,从而调节顶升件62的平面度,使得顶升件62在顶升夹具3后,可保证位于该夹具3上的初始组装件的平面度。
29.结合图1至图7,本实用新型的电芯上下胶壳焊接机构100的具体工作原理如下:
30.第一上料机械手4的所述第一取放部41先将所述下胶壳连同所述电芯一起搬运至与所述扫码机构9对应的位置处,扫码机构9对下胶壳进行扫描,同时,第一上料机械手4的第二取放部42将与其同侧的所述夹具3上的所述初始组装件取放至所述搬运机械手81。接着,第一上料机械手4驱动所述第一取放部41移动,使得所述第一取放部41将下胶壳与电芯取放至与其同侧的所述夹具3上,所述第二上料机械手5将上胶壳取放至与其同侧的所述夹具3上,使得所述下胶壳、所述电芯及所述上胶壳三者组装形成初始组装件,所述顶升机构6将与其同侧的所述夹具3顶升脱离所述转盘21,所述超声波焊接机构7对位于顶升后的所述夹具3上的所述初始组装件进行焊接,所述搬运机械手81将所述初始组装件搬运至与所述下料机械手82对应的位置处,所述下料机械手82将所述搬运机械手81上的未焊接的初始组装件搬运至不良品输送线83进行下料,所述下料机械手82将已焊接的初始组装件搬运至其他工位下料。当上料和焊接完成后,所述转动驱动机构2驱动所述转盘21转动,使得两侧的夹具3互相换位。如此循环。
31.综上所述,本实用新型的电芯上下胶壳焊接机构100通过转动驱动机构2驱动转盘21转动,使得转盘21一侧的夹具3与第一上料机械手4、第二上料机械手5对应,转盘21另一侧的夹具3与顶升机构6、超声波焊接机构7对应,使得第一上料机械手4和第二上料机械手5在对其中一个夹具3上料的同时,顶升机构6和超声波焊接机构7对另一个夹具3上的初始组装件进行顶升和焊接,如此快速高效地同步进行自动化上料和自动化焊接,极大地节约人工成本,并提高焊接效率。
32.以上所揭露的仅为本实用新型的较佳实例而已,不能以此来限定本实用新型之权利范围,因此依本实用新型权利要求所作的等同变化,均属于本实用新型所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。