1.本实用新型涉及焊接机技术领域,尤其涉及一种蓝带自动焊接机。
背景技术:
2.在现有技术中,医用纱布垫上的蓝带均是通过人工剪切和折叠后,再人工缝纫上去的,该种蓝带缝合方式具有工人劳动强度大、生产效率低和实施成本高等缺点。
技术实现要素:
3.有鉴于此,本实用新型提供了一种蓝带自动焊接机。
4.本实用新型提供一种蓝带自动焊接机,包括机架、上料辊、送料装置、固定单元、蓝带折叠装置、蓝带裁剪单元、焊接单元和接料平台,所述机架上具有水平设置的工作平台,所述上料辊沿前后方向设置在所述工作平台的上方,所述送料装置设置在所述上料辊的右侧,其第一进料端与所述上料辊连通,所述固定单元设置在所述送料装置的第一出料端处,其用于夹持蓝带,所述接料平台设置在所述固定单元的右侧,其上具有上下贯穿其设置的第二缺口,所述蓝带折叠装置移动安装在所述固定单元的上方,其接料端朝向所述固定单元的上方设置,在外力作用下,其可带动其接料端左右移动,所述蓝带折叠装置用于对蓝带进行折叠,并可带动折叠后的蓝带向右移动至所述接料平台的上方,所述蓝带裁剪单元设置在所述送料装置和所述固定单元之间,其用于对折叠后的蓝带进行裁剪,所述焊接单元设置在所述第二缺口的上方,其用于将折叠后的蓝带焊接在纱布垫上。
5.进一步地,所述送料装置包括导料单元和送料装置,所述导料单元设置在所述上料辊的右侧,其第二进料端与所述上料辊连通,所述送料装置设置在所述导料单元的下方,其第三进料端与所述导料单元的第二出料端连通,其第三出料端位于所述固定单元的上方,其中,所述导料单元用于限定蓝带的移动路径,所述送料装置用于将蓝带输送至固定单元处。
6.进一步地,所述导料单元包括导料辊、导料轮、第一导轨和提料件,所述导料辊和所述导料轮均沿前后方向转动安装在所述上料辊的一侧,并分别沿蓝带的输送方向间隔分布,且所述导料轮位于所述导料辊的上方,所述第一导轨竖直固定在所述导料辊和所述导料轮之间,所述提料件滑动安装在所述第一导轨上,其可沿所述第一导轨上下移动,并可固定在其移动轨迹的任意位置,其用于调整蓝带的移动路径,所述送料装置设置在所述导料轮的下方,其第三进料端与所述导料轮连通。
7.进一步地,所述送料装置包括第一直线驱动单元和送料杆,所述第一直线驱动的驱动端竖直设置,所述送料杆竖直设置,其内部中空且两端敞口,其上端位于所述导料轮的下方,其下端位于所述固定单元的上方,所述送料杆与所述第一直线驱动单元的驱动端固定连接,所述第一直线驱动单元可驱动所述送料杆上下移动至靠近或远离所述固定单元。
8.进一步地,所述蓝带折叠装置包括第二直线驱动单元、拉料杆、导料件和第三直线驱动单元,所述导料件为矩形的框架结构,其水平设置在所述固定单元的上方,所述第三直
线驱动单元设置在所述导料件的左侧,其驱动端与所述导料件的左侧固定连接,其可驱动所述导料件左右移动,所述拉料杆沿前后方向水平设置在所述导料件的下方,其后端与所述第二直线驱动单元的驱动端传动连接,所述接料平台设置所述拉料杆的右侧下方,所述第二直线驱动单元驱动所述拉料杆左右移动至远离或靠近所述接料平台,所述蓝带裁剪单元设置在所述导料件的上方。
9.进一步地,所述固定单元为气动夹头,所述气动夹头水平设置在所述送料杆的下端,其通过连接件与所述第二架体固定连接,且其夹持端位于所述拉料杆的下方。
10.进一步地,所述蓝带裁剪单元包括剪刀,所述剪刀水平设置在所述导料件的上方。
11.进一步地,所述蓝带裁剪单元还包括第五夹持件,所述第五夹持件设置在所述剪刀的右侧,其夹持端位于蓝带的移动路径上,其用于夹持折叠后的蓝带。
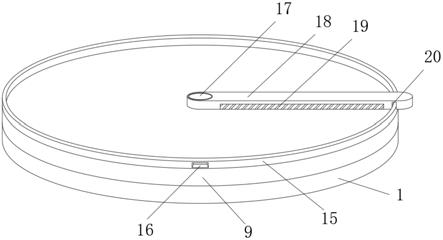
12.进一步地,所述焊接单元包括焊接头、焊接台和第五直线驱动单元,所述第五直线驱动单元设置在所述第二缺口的上方,其驱动端朝下设置,所述焊接头固定在所述第五直线驱动单元的驱动端上,所述焊接台设置在所述第二缺口的下方,所述第五直线驱动单元驱动所述焊接头上下移动至靠近或远离所述焊接台,所述接料平台的下端设有第六直线驱动单元,所述第六直线驱动单元驱动所述接料平台上下移动至远离或靠近所述焊接台的上端。
13.进一步地,所述接料平台的左侧上端设有第四夹持件,所述第四夹持件与所述第二架体固定连接,其夹持端朝向所述接料平台设置,其用于对折叠后的蓝带进行固定。
14.本实用新型提供的技术方案带来的有益效果是:本实用新型所述的一种蓝带自动焊接机,其可以实现对蓝带的自动送料、折叠、裁剪和焊接等操作,代替了传统的人工缝合方式,有效提高了蓝带的固定速度和固定效率,还具有操作简单、降低工人劳动强度和节省生产成本等优点。
附图说明
15.图1是本实用新型所述一种蓝带自动焊接机的结构示意图;
16.图2是本实用新型所述一种蓝带自动焊接机的结构示意图;
17.图3是本实用新型所述一种蓝带自动焊接机的结构示意图;
18.图4是图3中a的局部放大图;
19.图5是导料件和第三直线驱动单元的结构示意图;
20.图6是送料杆的结构示意图;
21.图7是第五夹持件的结构示意图。
具体实施方式
22.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型实施方式作进一步地描述。
23.请参考图1
‑
7,本实用新型的实施例提供了一种蓝带自动焊接机,包括机架 10、上料辊20、送料装置、固定单元40、蓝带折叠装置、蓝带裁剪单元、焊接单元和接料平台80,所述机架10上具有水平设置的工作平台11,所述工作平台11的上端设有支架,所述上料辊20沿前后方向设置在所述支架的上方,所述送料装置设置在所述上料辊20的右侧,其第一进
料端与所述上料辊20连通,所述固定单元40设置在所述送料装置的第一出料端处,其用于夹持蓝带,所述接料平台80设置在所述固定单元40的右侧,其上具有上下贯穿其设置的第二缺口81,所述蓝带折叠装置移动安装在所述固定单元40的上方,在外力作用下,其可带动其接料端左右移动,且其接料端朝向所述固定单元40的上方设置,所述蓝带折叠装置用于对蓝带进行折叠,并可带动折叠后的蓝带向右移动至所述接料平台80的上方,所述蓝带裁剪单元设置在所述送料装置和所述固定单元40 之间,其用于对折叠后的蓝带进行裁剪,所述焊接单元设置在所述第二缺口81 的上方,其用于将折叠后的蓝带焊接在纱布垫上。
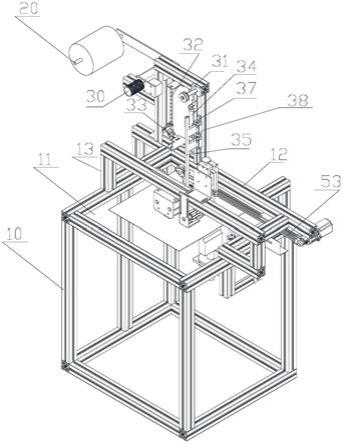
24.在本实用新型中,机架10为由不锈钢材质制成的框架结构,框架结构的机架10可减轻焊接机的重量。工作平台11的上端设有沿前后方向输送的直线输送装置(图中未示出),其中,直线输送装置为现有技术,其输送方向为前后方向,现有技术中传送带输送装置,传送带或由多个输送辊组成的辊道输送装置均可作为直线输送装置的具体实施例。纱布垫放置在工作平台11上,由直线输送装置将纱布垫向前输送。上料辊20、送料装置、固定单元40、蓝带折叠装置、蓝带裁剪单元和焊接单元均位于工作平台11的上方,并均固定在支架上,其中,为了保证各个部件之间的正常工作,支架为框架结构。蓝带卷放置在上料辊20 上。
25.在上述实施例中,所述支架包括第一架体12和第二架体13,所述第一架体 12和所述第二架体13均沿左右方向设置在所述工作平台11的上端,且所述第一架体12和所述第二架体13平行分布,所述上料辊20和所述送料装置固定在第一架体12上,所述固定单元40、所述蓝带裁剪单元和所述焊接单元固定第二架体13上。
26.在本实用新型中,第一架体12和第二架体13之间通过连接柱进行连接固定,以提高第一架体12和第二架体13的称重性能和稳固性。第一架体12和第二架体13之间限定出用于蓝带折叠、裁剪和焊接的操作区。其中,所述上料辊 20固定在第一架体12的上部。
27.在上述实施例中,所述送料装置包括导料单元和送料装置,所述导料单元设置在所述上料辊20的右侧,其第二进料端与所述上料辊20连通,所述送料装置设置在所述导料单元的下方,其第三进料端与所述导料单元的第二出料端连通,其第三出料端位于所述固定单元40的上方,其中,所述导料单元用于限定蓝带的移动路径,所述送料装置用于将蓝带输送至固定单元40处。
28.在本实用新型中,导料单元的第二进料端构成送料装置的第一进料端,送料装置的第三出料端构成送料装置的第一出料端。导料单元通过控制蓝带移动路径的长短达到控制蓝带输送长度的目的。而蓝带在依次穿过导料单元和送料装置后,由送料装置将蓝带输送至固定单元40处对蓝带进行固定。
29.在上述实施例中,所述导料单元包括导料辊30、导料轮31、第一导轨32 和提料件33,所述导料辊30和所述导料轮31均沿前后方向设置在所述上料辊 20的一侧,其靠近所述第一架体12的一端均与所述第一架体12转动连接,所述导料辊30和所述导料轮31沿蓝带的输送方向间隔分布,且所述导料轮31位于所述导料辊30的上方,所述第一导轨32竖直设置在所述导料辊30和所述导料轮31之间,其上下两端均与所述第一架体12固定连接,所述提料件33滑动安装在所述第一导轨32上,其可沿所述第一导轨32上下移动,并可固定在其移动轨迹的任意位置,其用于调整蓝带的移动路径,所述送料装置设置在所述导料轮31的下方,其第三进料端与所述导料轮31连通。
30.在本实用新型中,蓝带依次穿过导料辊30、提料件33和导料轮31后,输送至送料装置的第三进料端处。其中,通过上下移动提料件33,以改变蓝带移动路径的长短。在此,需要说明的是,本实用新型对驱动提料件33上下移动的方式不进行限定,其可以为电动驱动或手动驱动。本实用新型所述的导料装置不仅可实现对蓝带输送路径的调整,还具有结构简单、操作方便和实施成本低等优点。
31.在上述实施例中,所述送料装置包括第一直线驱动单元34和送料杆35,所述第一直线驱动单元34固定在所述第一架体12上,其驱动端竖直设置,所述送料杆35的内部中空且两端敞口设置,其竖直设置,其上端位于所述导料轮31 的下方,其下端位于所述固定单元40的上方,所述送料杆35与所述第一直线驱动单元34的驱动端固定连接,所述第一直线驱动单元34可驱动所述送料杆 35上下移动至靠近或远离所述固定单元40,所述蓝带裁剪单元设置在所述送料杆35的下方。
32.在本实用新型中,送料杆35的形状可以为圆柱体形、矩形或其他几何形状,具体的,其为矩形结构。此外,为了防止蓝带在送料杆35内随意移动,送料杆 35内设有第一夹持件36,第一夹持件36用于夹持蓝带,且送料杆35的一侧位于第一夹持件36的位置设有第一缺口。需要说明的是,本实用新型对第一夹持件36的结构不进行限制,现有技术中能实现对蓝带进行夹持的结构,均可作为第一夹持件36的具体实施例。第一直线驱动单元34包括第一伸缩气缸,伸缩气缸具有驱动轨迹平直、驱动速度快和实施成本低等优点。此外,为了保证第一直线驱动单元34输送轨迹的平直性,第一直线驱动单元34还包括与第一伸缩气缸平行设置的第二导轨37,送料杆35上设有与第二导轨37匹配的第一滑块38,第一滑块38与第二导轨37滑动连接,第一伸缩气缸驱动送料杆35沿导轨上下移动。蓝带经送料杆35的上端进入送料杆35内,并穿过送料杆35从送料杆35的下端输出,在第一直线驱动单元34的作用下,将送料杆35带动蓝带移动至固定单元40处,由固定单元40夹持并固定蓝带。
33.在上述实施例中,所述固定单元40为气动夹头,所述气动夹头水平设置在所述送料杆35的下端,其通过连接件与所述第二架体13固定连接,且其夹持端位于所述送料杆35的下端。
34.在本实用新型中,气动夹头可实现对蓝带的自动夹持。本实用新型对连接件的具体结构不进行限制,现有技术中能实现气动夹头与支架固定的结构均可作为本实用新型中连接件的具体实施例。
35.在上述实施例中,所述蓝带折叠装置包括第二直线驱动单元50、拉料杆51、导料件52和第三直线驱动单元53,所述导料件52为矩形的框架结构,其水平设置在所述固定单元40的上方,所述第三直线驱动单元53设置在所述导料件 52的左侧,其驱动端与所述导料件52的左侧固定连接,其可驱动所述导料件 52左右移动,所述第二直线驱动单元50固定在所述第一架体12的下部,其输送方向沿左右方向设置,所述拉料杆51沿前后方向水平设置在所述导料件52 的下方,其后端与所述第二直线驱动单元50的驱动端传动连接,所述接料平台 80设置在所述导料件52的右侧,并位于所述拉料杆51的下方,所述第二直线驱动单元50驱动所述拉料杆51左右移动至远离或靠近所述接料平台80。
36.在本实用新型中,所述第二直线驱动单元50为直线模组,直线模组沿左右方向固定在第一架体12的下部,且其上第二滑块朝下设置,拉料杆51与直线模组的第二滑块固定连接。第三直线驱动单元53为第二伸缩气缸,其第二伸缩杆朝右设置,与导料件52的左侧固
定连接。导料杆处于原始状态时,其与固定单元40的夹持端连通,蓝带穿过导料杆由固定单元40进行夹持后,第三直线驱动单元53启动,带动导料杆向左移动,此时,拉料杆51位于蓝带的左侧,同时,第三直线驱动单元53启动,带动拉料杆51拉动蓝带向右移动,以对蓝带折叠,第三直线驱动单元53继续驱动拉料杆51向右移动,以将折叠后的蓝带输送至接料平台80上。本实用新型所述的蓝带折叠装置具有操作方便等优点。
37.在上述实施例中,所述蓝带裁剪单元包括剪刀60,所述剪刀60水平设置在所述送料杆35和所述导料件52之间。
38.在本实用新型中,剪刀60通过第三连接件与第二架体13固定连接,且其通过气缸驱动,实现对蓝带的自动剪裁,其中,气缸驱动剪刀60工作为现有技术,在此不再对其具体连接结构和工作原理进行赘述。当拉料杆51拉动蓝带移动至蓝带折叠后,剪刀60将位于伸出接料杆下端的蓝带剪断,蓝带被剪断的同时,气动夹头松开对蓝带的夹持,拉料杆51则可带动折叠后的蓝带继续向右移动至接料平台80上。
39.在上述实施例中,所述蓝带裁剪单元还包括第五夹持件,所述第五夹持件设置在所述剪刀60的右侧,其夹持端位于蓝带的移动路径上,其用于夹持折叠后的蓝带。
40.在本实用新型中,当拉料杆51拉动折叠后的蓝带朝接料平台80处移动时,由第五夹持件夹持折叠后的蓝带,以将折叠后的蓝带拉直,此时,剪刀60启动,即可将蓝带剪断。有第五夹持件的夹持固定,有利于剪刀60快速剪断蓝带。
41.在上述实施例中,所述第五夹持件包括驱动单元61、上夹持柱62和下夹持柱63,所述上夹持柱62和所述下夹持柱63均竖直设置,并上下间隔的分布在所述剪刀60的右侧,且所述上夹持柱62和所述下夹持之间具有可供折叠后蓝带通过的通道,所述驱动单元61分别与所述上夹持柱62和所述下夹持柱63传动连接,其可同步驱动所述上夹持柱62和所述下夹持柱63移动至相互靠近或远离,以夹持或松开折叠后的蓝带。
42.在本实用新型中,驱动单元61为手指气缸,其竖直设置,并固定在第二架体13上,上夹持柱62和下夹持柱63分别固定在手指气缸的两个驱动轴上。在手指气缸的作用下,其可驱动上夹持柱62和下夹持柱63同时移动至相互靠近,以对折叠后的蓝带进行夹持,或相互远离,以松开折叠后的蓝带。本实用新型所述的第五夹持件具有操作方便、夹持速度快和实施成本低等优点。
43.在上述实施例中,所述焊接单元包括焊接头70、焊接台71和第五直线驱动单元72,所述第五直线驱动单元72设置在所述第二缺口81的上方,其驱动端朝下设置,所述焊接头70固定在所述第五直线驱动单元72的驱动端上,所述焊接台71设置在所述第二缺口81的下方,所述第五直线驱动单元72驱动所述焊接头70上下移动至靠近或远离所述焊接台71。
44.在本实用新型中,第五直线驱动单元72为第三伸缩气缸,焊接头70为现有技术,本实用新型对其具体结构和工作原理不再进行赘述。所述接料平台80 为板状结构,其沿左右方向设置,其下端设有第六直线驱动单元82,第六直线驱动单元82为第四伸缩气缸,其固定在机架10上,其第四伸缩杆朝上设置,并与接料平台80的下端固定连接,第六直线驱动单元82驱动其第四伸缩杆带动接料平台80向下移动至接料平台80的第二缺口81与焊接台71的上端贴合,以提高蓝带焊接的精准度,或向上移动远离焊接台71。
45.在上述实施例中,所述接料平台80的左侧上端设有第四夹持件,所述第四夹持件与所述第二架体13固定连接,其夹持端朝向所述接料平台80设置,其用于对折叠后的蓝带
进行固定。
46.在本实用新型中,当拉料杆51拉动折叠后的蓝带完全移动至接料平台80 上时,第四夹持件将蓝带远离拉料带端部进行固定,以拉直蓝带,方便焊接头 70对蓝带的定位和焊接,提高焊接效率和焊接效果。
47.在上述实施例中,所述第四夹持件包括第七直线驱动单元83和固定板84,其驱动端位于所述接料平台80左侧的上方,所述固定板84水平设置在所述第七直线驱动单元83的下方,其上端与所述第七直线驱动单元83的驱动端固定连接,所述第七直线驱动单元83驱动所述固定板84上下移动至远离或靠近所述固定板84。
48.在本实用新型中,第七直线驱动单元83为第五伸缩气缸,本实用新型对固定板84的结构不进行限定,其可为的正方体结构等几何结构,具体的,其为“l”形,“l”形的固定板84可缩短第五伸缩气缸的驱动里程,减少能耗。
49.在本文中,所涉及的前、后、上、下等方位词是以附图中零部件位于图中以及零部件相互之间的位置来定义的,只是为了表达技术方案的清楚及方便。应当理解,所述方位词的使用不应限制本技术请求保护的范围。
50.在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
51.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。