1.本实用新型属于无人靶机技术领域,具体来说,涉及一种无人靶机系统。
背景技术:
2.靶机泛指作为射击训练目标的一种军用飞行器。这种飞行器利用遥控或者是预先设定好的飞行路径与模式,于军事演习或武器试射时模拟敌军之航空器或来袭导弹,为各类型火炮或是导弹系统提供假想的目标与射击的机会,属于无人飞机的一种。靶机有专门制造的,也有用老式飞机改装的;有一次使用的,也有多次使用的。
3.近些年来,为了测试如导弹、战斗机等这些武器系统的性能,仿真模拟器和真实打靶环境是两种常用的试验方法。虽然仿真模拟器有一定的实际作用,但仍然无法替代真实打靶环境中的靶机。因此,无人靶机在军事演习以及武器试验中的重要性越来越突出。
技术实现要素:
4.为了解决上述现有技术的不足之处,本实用新型的目的在于提供一种无人靶机系统,以克服现有技术中的缺陷。
5.为了实现上述目的,本实用新型提供了一种无人靶机系统,所述无人靶机系统包括与地面端进行通信的无线数传电台和控制模块;其中,无线数传电台与控制模块电连接和信号连接,无线数传电台用于接收地面端的控制指令和预设飞行路线并传输至控制模块,控制模块用于处理所述控制指令并生成相应的控制信号;控制模块与发射驱动模块电连接和信号连接,发射驱动模块与无人靶机内部安装的涡喷发动机电连接和信号连接,控制模块用于生成发射信号并传输至发射驱动模块,发射驱动模块用于根据发射信号控制涡喷发动机启动;控制模块分别与定位导航模块和飞行状态调整模块电连接和信号连接,定位导航模块与飞行状态调整模块电连接和信号连接,控制模块用于将预设飞行路线传输至定位导航模块,定位导航模块用于获取无人靶机的位置信息,并根据预设飞行路线控制飞行状态调整模块,飞行状态调整模块用于调整无人靶机的飞行姿态;控制模块与目标干扰模块电连接和信号连接,控制模块用于生成干扰驱动信号并传输至目标干扰模块,目标干扰模块用于根据干扰驱动信号发射雷达目标或红外目标;控制模块与回收驱动模块电连接和信号连接,回收驱动模块分别与无人靶机内部安装的降落伞和涡喷发动机电连接和信号连接,控制模块用于生成回收信号并传输至回收驱动模块,回收驱动模块用于根据回收信号控制降落伞启动并打开,控制涡喷发动机关闭。
6.通过上述技术方案,无人靶机系统设置发射驱动模块控制其涡喷发动机启动,设置定位导航模块和飞行状态调整模块控制无人靶机按预设飞行路线飞行以及调整无人靶机的飞行姿态,设置目标干扰模块形成雷达目标或红外目标的干扰效果,设置回收驱动模块控制降落伞启动并打开,控制涡喷发动机关闭,保障无人靶机能够正常、稳定的执行飞行任务,以满足无人靶机完成军事演习以及武器试验的任务。
7.作为对本实用新型所述的无人靶机系统的进一步说明,优选地,所述无人靶机系
统还包括故障诊断模块,故障诊断模块分别与控制模块和回收驱动模块电连接和信号连接,故障诊断模块用于实时检测无人靶机的飞行状态并传输至控制模块,控制模块用于将飞行状态通过无线数传电台回传至地面端,在飞行状态异常时,控制模块生成回收信号并传输至回收驱动模块。
8.通过上述技术方案,故障诊断模块实时检测无人靶机的飞行状态,包括设置在无人靶机各个位置的如陀螺仪、雷达、电压、电流、磁场感应、gps等传感器,根据各传感器采集的数据,可以判断出无人机的飞行状态,如无人机的起飞、降落、平稳飞行、飞行方向有障碍物、无人机飞行电量不足、航线偏离等。当判断出具体的飞行状态时,可以生成对应的输出信号。该输出信号为异常信号时,则控制模块会自主生成回收信号,回收驱动模块会控制降落伞启动并打开,控制涡喷发动机关闭,同时各传感器采集的数据会回传至地面端,以避免影响军事演习以及武器试验的效果。
9.作为对本实用新型所述的无人靶机系统的进一步说明,优选地,飞行状态调整模块与将涡喷发动机的喷口推力线在360
°
范围内转动的转动装置电连接和信号连接。
10.作为对本实用新型所述的无人靶机系统的进一步说明,优选地,目标干扰模块包括安装在无人靶机上的多枚红外诱饵弹或铂条弹或电磁干扰设备。
11.作为对本实用新型所述的无人靶机系统的进一步说明,优选地,定位导航模块包括gps定位导航装置、北斗定位导航装置或者复合定位导航装置。
12.本实用新型的有益效果:本实用新型的无人靶机系统设置发射驱动模块控制其涡喷发动机启动,设置定位导航模块和飞行状态调整模块控制无人靶机按预设飞行路线飞行以及调整无人靶机的飞行姿态,设置目标干扰模块形成雷达目标或红外目标的干扰效果,设置回收驱动模块控制降落伞启动并打开,控制涡喷发动机关闭,保障无人靶机能够正常、稳定的执行飞行任务,以满足无人靶机完成军事演习以及武器试验的任务。
附图说明
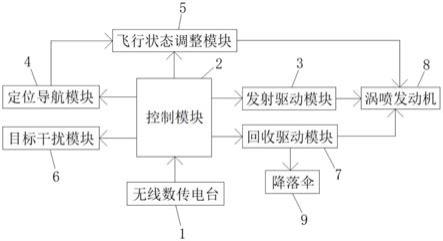
13.图1是本实用新型的无人靶机系统的结构示意图。
14.图2是本实用新型的故障诊断模块的连接关系示意图。
具体实施方式
15.为了能够进一步了解本实用新型的结构、特征及其他目的,现结合所附较佳实施例附以附图详细说明如下,本附图所说明的实施例仅用于说明本实用新型的技术方案,并非限定本实用新型。
16.首先,请参考图1,图1是本实用新型的无人靶机系统的结构示意图。无人靶机系统包括与地面端进行通信的无线数传电台1和控制模块2。其中,无线数传电台1与控制模块2电连接和信号连接,无线数传电台1用于接收地面端的控制指令和预设飞行路线并传输至控制模块2,控制模块2用于处理所述控制指令并生成相应的控制信号。控制模块2与发射驱动模块3电连接和信号连接,发射驱动模块3与无人靶机内部安装的涡喷发动机8电连接和信号连接,控制模块2用于生成发射信号并传输至发射驱动模块3,发射驱动模块 3用于根据发射信号控制涡喷发动机8启动。
17.请参看图1,控制模块2分别与定位导航模块4和飞行状态调整模块5电连接和信号
连接,定位导航模块4与飞行状态调整模块5 电连接和信号连接,控制模块2用于将预设飞行路线传输至定位导航模块4,定位导航模块4用于获取无人靶机的位置信息,并根据预设飞行路线控制飞行状态调整模块5,飞行状态调整模块5用于调整无人靶机的飞行姿态;优选地,飞行状态调整模块5与将涡喷发动机8的喷口推力线在360
°
范围内转动的转动装置电连接和信号连接;定位导航模块4包括gps定位导航装置、北斗定位导航装置或者复合定位导航装置。
18.请参看图1,控制模块2与目标干扰模块6电连接和信号连接,控制模块2用于生成干扰驱动信号并传输至目标干扰模块6,目标干扰模块用于根据干扰驱动信号发射雷达目标或红外目标;优选地,目标干扰模块6包括安装在无人靶机上的多枚红外诱饵弹或铂条弹或电磁干扰设备。控制模块可以对电磁干扰设备进行开启、关闭、功率控制以及角度调整。
19.请参看图1,控制模块2与回收驱动模块7电连接和信号连接,回收驱动模块7分别与无人靶机内部安装的降落伞9和涡喷发动机8 电连接和信号连接,控制模块2用于生成回收信号并传输至回收驱动模块7,回收驱动模块7用于根据回收信号控制降落伞9启动并打开,控制涡喷发动机8关闭。
20.上述无人靶机系统设置发射驱动模块控制其涡喷发动机启动,设置定位导航模块和飞行状态调整模块控制无人靶机按预设飞行路线飞行以及调整无人靶机的飞行姿态,设置目标干扰模块形成雷达目标或红外目标的干扰效果,设置回收驱动模块控制降落伞启动并打开,控制涡喷发动机关闭,保障无人靶机能够正常、稳定的执行飞行任务,以满足无人靶机完成军事演习以及武器试验的任务。
21.请参看图2,所述无人靶机系统还包括故障诊断模块10,故障诊断模块10分别与控制模块2和回收驱动模块7电连接和信号连接,故障诊断模块10用于实时检测无人靶机的飞行状态并传输至控制模块2,控制模块2用于将飞行状态通过无线数传电台1回传至地面端,在飞行状态异常时,控制模块2生成回收信号并传输至回收驱动模块7。通过故障诊断模块实时检测无人靶机的飞行状态,包括设置在无人靶机各个位置的如陀螺仪、雷达、电压、电流、磁场感应、gps 等传感器,根据各传感器采集的数据,可以判断出无人机的飞行状态,如无人机的起飞、降落、平稳飞行、飞行方向有障碍物、无人机飞行电量不足、航线偏离等。当判断出具体的飞行状态时,可以生成对应的输出信号。该输出信号为异常信号时,则控制模块会自主生成回收信号,回收驱动模块会控制降落伞启动并打开,控制涡喷发动机关闭,同时各传感器采集的数据会回传至地面端,以避免影响军事演习以及武器试验的效果。
22.需要声明的是,上述实用新型内容及具体实施方式意在证明本实用新型所提供技术方案的实际应用,不应解释为对本实用新型保护范围的限定。本领域技术人员在本实用新型的精神和原理内,当可作各种修改、等同替换或改进。本实用新型的保护范围以所附权利要求书为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

