具备能够连结的多个飞行体的飞行体系统
1.本技术是下述申请的分案申请:
2.发明名称:具备能够连结的多个飞行体的飞行体系统
3.申请日:2018年7月17日
4.国家申请号:201880095585.6
技术领域
5.本发明涉及具备能够连结的多个飞行体的飞行体系统。
背景技术:
6.近年来,提供了利用被用于各种用途的无人机(drone)、无人飞行器(uav:unmanned aerial vehicle)等旋翼机(以下,总称为“旋翼机”)的各种服务。由于这些旋翼机能够具备照相机、传感器、拾音器、喷雾器、扬声器等多种作业部,因此工业利用的范围进一步扩大。此外,上述旋翼机有为了可长时间移动而具备大容量的电池、燃料、用于从外部接受供电的电缆等的机型。
7.专利文献1提供一种装置,其能够利用来自外部的供电进行长时间的飞行,同时能够利用其他的飞行体支撑供电电缆,从而进行高效的长时间的飞行(例如,参照专利文献1)。
8.现有技术文献
9.专利文献
10.专利文献1:wo2017094842a1公报
技术实现要素:
11.发明所要解决的问题
12.在专利文献1中,作业用飞行体、其他多个飞行体、地面供电装置与供电电缆连接。上述其他多个飞行体起到支撑供电电缆的作用,由此作业用飞行体能够高效地、长时间地且不受供电线的布置上的限制地飞行。
13.但是,专利文献1中的飞行体终究通过电缆与地面上装备的供电设备连结,飞行并不自由。此外,在要将作业用飞行体用于各种用途的情况下,其作业受到飞行体产生的风、声音等各种影响。
14.根据作业内容,有时飞行体产生的风、声音会对对象造成影响,导致作业本身无法实施。另外,若作业场所狭小,则有可能飞行体无法进入或者在进入过程中伴随有接触等危险。
15.因此,本发明的一个目的在于提供一种飞行系统,其相对于支撑用飞行体另外设置由电缆连结的作业用飞行体,支撑用飞行体相对于作业对象保持一定的距离或保持在能够进行安全的飞行的位置、而作业用飞行体相对于作业对象接近至适当距离并能够进行适于作业的动作。
16.用于解决问题的方案
17.根据本发明,能够提供一种旋翼机系统,其具备第一旋翼机及第二旋翼机,其中,所述第一旋翼机与所述第二旋翼机通过连结电缆连结。
18.发明的效果
19.根据本发明,能够提供一种飞行系统,其相对于具备支撑功能的飞行体另外设置由电缆连结的作业用飞行体,具备支撑功能的飞行体相对于作业对象保持一定的距离或保持在能够进行安全的飞行的位置、而作业用飞行体相对于作业对象接近至适当距离并能够进行适于作业的动作。
附图说明
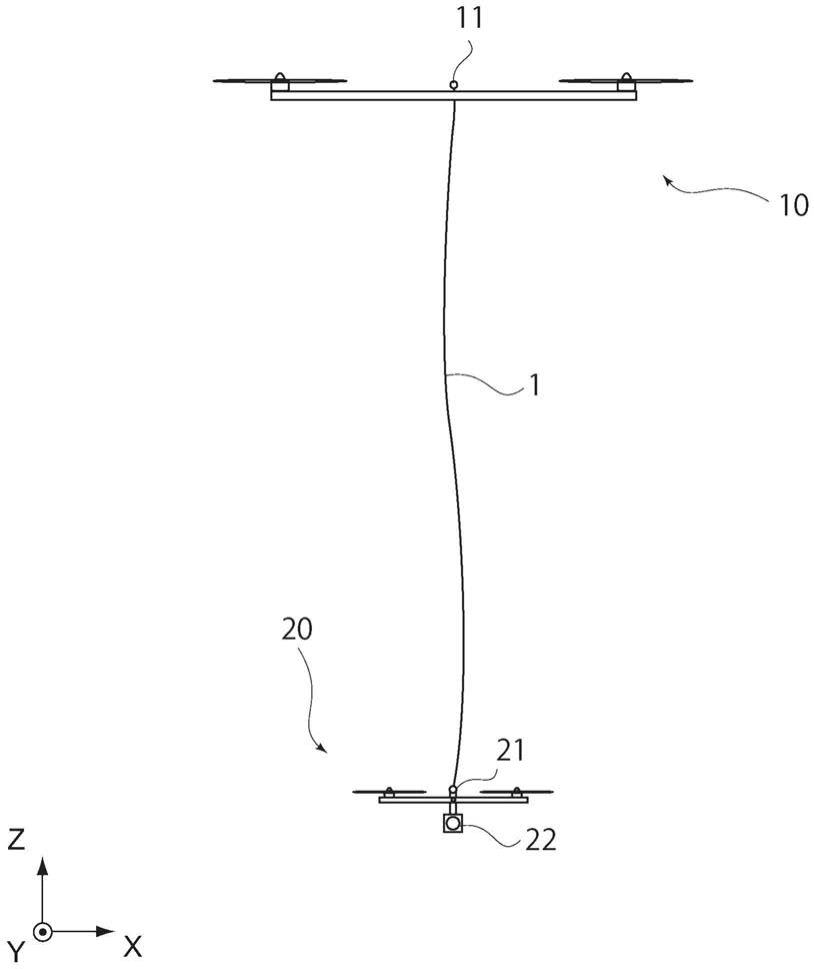
20.图1是本发明的飞行体系统的侧视图。
21.图2是图1的飞行体系统的另一侧视图。
22.图3是从上方观察图2的飞行体系统的图。
23.图4是示出图1的飞行体系统的使用例的图。
24.图5是在图1的飞行体系统中在电缆上连接有其他的第一旋翼机的图。
25.图6是示出图1的飞行体系统中的替换作业的图,示出了第一旋翼机从电缆分离并替换为其他的第一旋翼机的情形。
26.图7是从上方观察本发明的飞行体系统中使用的旋翼机的例子时的图。
27.图8是示出本发明的飞行体系统中的其他的替换作业的图。
28.图9是示出本发明的飞行体系统中的又一其他的替换作业的图。
29.图10是示出本发明的飞行体系统中的又一其他的替换作业的图。
30.图11是示出本发明的飞行体系统中的其他实施方式的图。
31.图12是本发明的飞行体系统中使用的旋翼机的功能框图。
具体实施方式
32.列出本发明的实施方式的内容进行说明。本发明的实施方式的具备能够连结的多个飞行体的飞行体系统具备以下结构。
33.[项目1]
[0034]
一种旋翼机系统,其具备第一旋翼机及第二旋翼机,其中,所述第一旋翼机与所述第二旋翼机通过连结电缆连结。
[0035]
[项目2]
[0036]
根据项目1所述的旋翼机系统,其中,所述第二旋翼机具备作业部。
[0037]
[项目3]
[0038]
根据项目2所述的旋翼机系统,其中,所述第一旋翼机及所述第二旋翼机在飞行模式下维持该第一旋翼机及该第二旋翼机的飞行,在作业模式下即使维持该第一旋翼机的飞行并停止该第二旋翼机的飞行也会通过所述作业部进行作业。
[0039]
[项目4]
[0040]
根据项目2所述的旋翼机系统,其中,所述作业部是拾音部,所述第一旋翼机及所述第二旋翼机构成为相互间隔开,以使得在所述作业模式下由所述第一旋翼机产生的声音
不会进入所述拾音部。
[0041]
[项目5]
[0042]
根据项目1至3中任意一项所述的旋翼机系统,其中,所述第一旋翼机具有与所述连结电缆连接的第一连接部,所述第二旋翼机具有与所述连结电缆连接的第二连接部,至少所述第一连接部或所述第二连接部中的任意一个能够在规定范围内相对于所述第一旋翼机或所述第二旋翼机独立地摆动。
[0043]
[项目6]
[0044]
根据项目1所述的旋翼机系统,其中,所述第二旋翼机经由所述连结电缆由所述第一旋翼机供电。
[0045]
[项目7]
[0046]
根据项目1至6中任意一项所述的旋翼机系统,其中,
[0047]
所述连结电缆能够与其他的第一旋翼机连接。
[0048]
[项目8]
[0049]
根据项目7所述的旋翼机系统,其中,
[0050]
所述第一旋翼机构成为,在所述连结电缆从所述第一旋翼机连接到所述其他的第一旋翼机后,从所述连结电缆分离。
[0051]
[项目9]
[0052]
根据项目1至8中任意一项所述的旋翼机系统,其中,
[0053]
所述连结电缆能够与其他的第二旋翼机连接。
[0054]
[项目10]
[0055]
根据项目9所述的旋翼机系统,其中,
[0056]
所述第二旋翼机构成为,在所述连结电缆从所述第二旋翼机连接到所述其他的第二旋翼机后,从所述连结电缆分离。
[0057]
<本发明的实施方式的详述>
[0058]
以下参照附图对本发明的实施方式的具备能够连结的多个飞行体的飞行体系统进行说明。
[0059]
<本发明的实施方式的详述>
[0060]
以下,参照附图对本发明的实施方式的具备能够连结的多个飞行体的飞行体系统进行说明。
[0061]
<本发明的第一实施方式>
[0062]
本发明的实施方式的飞行体系统具备第一旋翼机10及第二旋翼机20,第一旋翼机10与第二旋翼机20通过连结电缆1连结。此时,第一旋翼机10和第二旋翼机20的数量可以是多个,且其各自的数量可以成正比或不成正比。例如,第一旋翼机10为一台而第二旋翼机20为五台的状态或与此相反的状态等。
[0063]
如图1所示,第二旋翼机20具备与主体部连结的作业部22,能够进行规定作业。作为作业部22及该作业部22进行的作业,例如有由照相机、传感器、麦克风等能够获取外界信息的信息获取设备进行的拍摄、监视、调查、记录,由喷雾器、喷涂装置、放水装置进行的液体的散布、涂装、灭火、对动植物的洒水,由扬声器、臭气产生装置、发光装置进行的向外部的作用,由工具或机械臂进行的工作、修整、物体的移动等,但不限于此。
[0064]
第一旋翼机10及第二旋翼机20各自能够维持自身的飞行(飞行模式)。
[0065]
此外,第一旋翼机10也能够维持自身的飞行,并且在第二旋翼机20停止飞行的同时通过彼此连接的连结电缆1使第二旋翼机20保持在空中进行作业(作业模式)。
[0066]
在上述作业模式下,第二旋翼机20使用作业部22进行作业。即使第二旋翼机20停止飞行也仍可通过第一旋翼机10停留在空中,因此第二旋翼机20的作业部22能够在其使用不受第二旋翼机20在飞行时发出的声音、风、磁力等各种影响的情况下进行作业。
[0067]
在作业部22是麦克风等的拾音部的情况下,在上述作业模式下,第一旋翼机10及第二旋翼机20构成为彼此充分间隔开,由此防止从第一旋翼机10产生的声音进入上述拾音部,得到良好的作业结果。换言之,在第一旋翼机10产生的声音不会进入作为拾音部的作业部22中的位置上相互分隔开。
[0068]
以使用上述拾音部的作业为例,首先,通过连结电缆1连结的第一旋翼机10及第二旋翼机20从起飞地点开始飞行。在飞行模式下移动到进行拾音作业的地点后,转入作业模式进行拾音作业。在作业结束后,飞行到降落地点,降落。此外,在存在多个作业地点的情况下,也能够切换飞行模式和作业模式而反复进行移动和作业,在一次飞行中高效地进行作业。
[0069]
第一旋翼机10具备与连结电缆1连接的第一连接部11。此外,第二旋翼机20具备与连结电缆1连接的第二连接部21。至少第一连接部11或第二连接部21的任任意一个能够在规定范围内相对于第一旋翼机10或第二旋翼机20独立地摆动。由此,能够在不拘泥于相互的飞行姿势的情况下进行灵活且安全的飞行。
[0070]
<本发明的第二实施方式>
[0071]
在本发明的第二实施方式的详述中,与第一实施方式重复的结构要素进行同样的动作,因此省略重复的说明。
[0072]
连结电缆1只要使第一旋翼机10及第二旋翼机20连结即可,例如,在使用能够供电的电线、复合电缆的情况下,第二旋翼机能够经由连结电缆1从第一旋翼机接受供电。
[0073]
在要使飞行体长时间飞行时,需要根据其状况、时间长度而具备电池、燃料。但是,进行作业的第二旋翼机20有时要求小型化、机动性。例如,进入狭窄的空间的作业、在不可被生物等作业对象识别出的状态下的作业等。此时,具备大型的电池等可能是不利的。因此,若第一旋翼机10具备大型的电池,第二旋翼机20通过连结电缆接受供电,则第二旋翼机20能够兼顾长时间的飞行、轻量、小型化。
[0074]
在第二旋翼机20具备自身飞行所需的电池等的情况下,即使中断来自第一旋翼机10的供电也能够维持飞行状态,另外,在将连接目标从第一旋翼机10变为其他的第一旋翼机12时,能够自己飞行并移动。关于连接目标的改变,将在后面叙述。
[0075]
<本发明的第三实施方式>
[0076]
本发明的第三实施方式的飞行体系统能够将第一旋翼机10替换成其他的第一旋翼机(以下,不论是将第一旋翼机或第二旋翼机替换为其他旋翼机的作业均简称为“替换作业”)。在本发明的第三实施方式的详述中,由于与第一实施方式重复的结构要素进行同样的动作,因此省略重复的说明。
[0077]
作为本实施方式的替换作业的方法,可以列举将第一旋翼机10替换成其他的第一旋翼机10的方法、将第二旋翼机替换成其他的第二旋翼机的方法以及这两者。此外,其他的
第一旋翼机10及第二旋翼机20可以为多台。
[0078]
第二旋翼机20也能够经由连结电缆1与其他的第一旋翼机12连接。例如,通过从电池剩余电量减少的第一旋翼机10连接到电池剩余电量更多的其他的第一旋翼机12,在之后电池剩余电量减少时再次连接到其他的飞行体连接,能够进行长时间的作业。特别是在起飞地点远离进行作业的地点的状况下,无需第二旋翼机20进行往返等,能够高效地实施作业。
[0079]
如图4至图6所示,在其他的第一旋翼机12与连结电缆1连接后,第一旋翼机10能够从连结电缆1分离。这样,第二旋翼机20能够始终与至少一台以上第一旋翼机10或其他的第一旋翼机12持续连结。由此,能够减少第二旋翼机20利用自身的电池飞行的时间,延长第二旋翼机20的活动时间。关于其他的飞行体的连接方法,将在后面进行描述。
[0080]
<本发明的第四实施方式>
[0081]
在本发明的第四实施方式的详述中,与第一实施方式重复的结构要素进行同样的动作,因此省略重复的说明。
[0082]
第一旋翼机10也能够经由连结电缆1与其他的第二旋翼机23连接。例如,在连结电缆1成为飞行、作业的障碍的状况下,第二旋翼机20、其他的第二旋翼机23利用自身所具备的电池等活动。在电池剩余电量减少的情况下,第二旋翼机20与第一旋翼机10连接,接受供电。若供电结束,则此次其他的第二旋翼机23能够与第一旋翼机10连接,接受供电。关于飞行体的连接,将在后面进行描述。
[0083]
在其他的第二旋翼机23与连结电缆1连接后,第二旋翼机20能够从连结电缆1分离。这样,第一旋翼机10能够始终与至少一台以上第二旋翼机20或其他的第二旋翼机23持续连结。由于进行供电等的第一旋翼机10本身也在飞行,因此通过无间隔地与第二旋翼机20或其他的第二旋翼机23连接,减少例如不进行供电而仅通过自身飞行的时间,提高电池的使用效率。关于其他的飞行体的连接方法,将在后面进行描述。
[0084]
关于飞行体的连接方法,以下举例说明其一部分。作为示例,虽然也有仅以第一旋翼机10、其他的第一旋翼机12、第二旋翼机20、其他的第二旋翼机23这样的名称进行叙述的例子,但是如上所述,存在与第一旋翼机10连接的第二旋翼机20重新与其他的第一旋翼机12连接的情况、与第二旋翼机20连接的第一旋翼机10重新与其他的第二旋翼机23连接的情况,因此只要与本发明的主旨没有矛盾,第一旋翼机10、其他的第一旋翼机12、第二旋翼机20、其他的第二旋翼机23可以分别替换读作第二旋翼机20、其他的第二旋翼机23、第一旋翼机10、其他的第一旋翼机12。
[0085]
[例1]
[0086]
如图4至图6的使用例所示,为其他的第一旋翼机12与位于第一旋翼机10及第二旋翼机20之间的连结电缆1连接,第一旋翼机10向连结电缆1的上方分离的方法。此时,例如,若其他的第一旋翼机12具有如图7所示的从上方观察呈大致倒u字形、或大致c字形、大致u字形等具有电缆能够通过的间隙的形状,则可以简便地进行连接。
[0087]
[例2]
[0088]
如图8至图10的图所示,第二旋翼机20从连接于第一旋翼机10的连结电缆1分离,并连接到与其他的第一旋翼机12连接的连结电缆1的方法。此外,第一旋翼机10从连接于第二旋翼机20的连结电缆1分离,其他的第一旋翼机12重新与连结电缆1连接的方法。
[0089]
[例3]
[0090]
其他的第一旋翼机12接近与第二旋翼机20连结的第一旋翼机10的上方或横向侧旁,从第一旋翼机10向其他的第一旋翼机12进行连结电缆1的交接,其他的第一旋翼机12重新与连结电缆1连接的方法。另外,在进行连结电缆1的交接时,有时会由于电缆的刚性而出现电缆弯曲、在交接过程中产生问题,因此,除了将与交接有关的部分的连结电缆1设计成无法弯曲以外,优选使用辅助工具来防止电缆的弯曲。
[0091]
[例4]
[0092]
与第一旋翼机10连结的连结电缆1分成两股以上的分支,其他的第一旋翼机12重新与第二旋翼机20所连接的电缆端以外的电缆端连接的方法。
[0093]
[例5]
[0094]
如图11所示,第一旋翼机10也可以在从地面供电装置(设施)通过供电电缆(地面供电电缆)30接受供电的同时,在空中进行悬停等。第二旋翼机20从连结电缆1接受来自在空中始终待机的第一旋翼机的供电而进行作业。在这种情况下,第一旋翼机10至少不需要为了供电而进行替换作业,因此能够使第二旋翼机20更机动地进行作业。
[0095]
上述旋翼机(第一旋翼机10及第二旋翼机20)具有图12所示的功能块。另外,图12的功能块是最低限度的参考结构。飞行控制器是所谓的处理单元。处理单元可以具有可编程处理器(例如中央处理单元(cpu))等一个以上处理器。处理单元具有未图示的存储器,并能够访问该存储器。存储器存储有为进行一个以上的步骤而能够由处理单元执行的逻辑、代码和/或编程指令。存储器例如可以包括sd卡、随机存取存储器(ram)等可分离的介质或外部存储装置。从照相机、传感器类获取的数据也可以直接传递并存储到存储器中。例如,由照相机等拍摄的静止图像和动态图像数据被记录在内置存储器或外部存储器中。
[0096]
处理单元包括构成为控制旋翼机的状态的控制模块。例如,控制模块控制旋翼机的推进机构(马达等),以调整具有六自由度(平移运动x、y和z、以及旋转运动θ
x
、θ
y
和θ
z
)的旋翼机的空间配置、速度和/或加速度。控制模块可以控制搭载部、传感器类的状态中的一个以上状态。
[0097]
处理单元可以与构成为发送和/或接收来自一个以上外部设备(例如终端、显示装置或其他远程控制器)的数据的收发部进行通信。收发部能够使用有线通信或无线通信等任意适当的通信手段。例如,收发部能够利用局域网(lan)、广域网(wan)、红外线、无线、wifi、点对点(p2p)网络、电信网络、云通信等中的一个以上。收发部能够发送和/或接收由传感器类获取的数据、由处理单元生成的处理结果、规定的控制数据、来自终端或远程控制器的用户命令等中的一个以上。
[0098]
本实施方式的传感器类可以包括惯性传感器(加速度传感器、陀螺仪传感器)、gps传感器、接近传感器(例如雷达)或视觉/图像传感器(例如照相机)。
[0099]
本发明的旋翼机可以期待其作为监控、调查业务专用旋翼机的用途和作为仓库、工厂内、室外的工业用旋翼机的用途。此外,本发明的旋翼机可以用在多旋翼无人机等飞行器相关产业中,并且,本发明除了适合用作搭载有照相机等的调查用旋翼机之外,还可以用于安保领域、农业、研究、灾害期间、基础设施检查等各种产业。
[0100]
上述实施方式仅是为了容易理解本发明而例示的,并不用于限定地解释本发明。本发明在不脱离其主旨的范围内能够进行变更、改良,并且本发明当然包含其等同物。
[0101]
上述实施方式仅是为了容易理解本发明而例示的,并不用于限定地解释本发明。本发明在不脱离其主旨的范围内能够进行变更、改良,并且本发明当然包含其等同物。
[0102]
符号说明
[0103]
1 连结电缆
[0104]
10 第一旋翼机
[0105]
11 第一连接部
[0106]
12 其他的第一旋翼机
[0107]
20 第二旋翼机
[0108]
21 第二连接部
[0109]
22 作业部
[0110]
23 其他的第二旋翼机
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

