1.本发明属于航空技术领域,具体涉及一种基于固定翼无人机的高速飞行器终末段综合实验系统及方法。
背景技术:
2.随着科学技术的发展,高速飞行器成为各军事强国相互竞争的热点领域之一。对于高速飞行器整个飞行过程,终末段性能是高速飞行器研发的重点之一。得益于人工智能技术、自动控制技术以及材料科学的快速发展,高速飞行器的终末段突防能力得到大幅提升。在高速飞行器终末段突防技术研发和装备设计制造过程中,需要开展大量的相关实验来验证技术和装备的有效性、可靠性。
3.开展大量全飞行段的高速飞行器实验是验证飞行器终末段性能的最直接实验手段,但全飞行段实验成本高、周期长、效费比低,不具备现实可行性。而直接采用机载空投,又不能满足高速飞行器终末段飞行实验对高飞行速度、精确飞行姿态的初始条件要求。现今为止尚无一种专门针对高速飞行器终末段飞行实验方法和系统的公开报道。
技术实现要素:
4.本发明的目的在于提供一种基于固定翼无人机的高速飞行器终末段综合实验系统。
5.本发明的目的通过如下技术方案来实现:包括固定翼无人机1、任务控制段2、参试高速飞行器3和测控子系统4;所述的固定翼无人机1的机身中部设有空投舱,空投舱门1
‑
6位于机身正下方;所述的任务控制段2包括任务控制段主体2
‑
1;所述的任务控制段主体2
‑
1整体为圆柱壳,在任务控制段主体2
‑
1首端设有法兰连接板安装壁,在任务控制段主体2
‑
1尾端设有尾封板2
‑
8,在任务控制段主体2
‑
1内部设有推进发动机2
‑
3、降落伞舱2
‑
4和控制器2
‑
5,在任务控制段主体2
‑
1后部外侧设有四个格栅气动舵安装槽,在格栅气动舵安装槽中安装有格栅气动舵2
‑
2,四组格栅气动舵2
‑
2沿任务控制段主体2
‑
1周向均匀分布;所述的推进发动机2
‑
3的喷口由尾封板2
‑
8中部开孔伸出;
6.在开始高速飞行器终末段实验之前,将参试高速飞行器3与任务控制段2通过导流板2
‑
6和连接法兰2
‑
7组合成测试组合体5,将测试组合体5置于固定翼无人机1的空投舱中;所述的连接法兰2
‑
7一端固定于任务控制段主体2
‑
1首端的法兰连接板安装壁,另一端与参试高速飞行器3尾部连接;所述的导流板2
‑
6一端安装于任务控制段主体2
‑
1首部,另一端紧密贴在参试高速飞行器3尾部,实现任务控制段2与高速飞行器3之间的气动外形光滑过渡;
7.开始高速飞行器终末段实验后,固定翼无人机1飞行至指定空域后,打开空投舱门1
‑
6将测试组合体5抛离,而后固定翼无人机1返航;测试组合体5飞离固定翼无人机1至安全距离后,任务控制段2中的推进发动机2
‑
3开始工作,将测试组合体5加速至实验速度,在加速过程中通过格栅气动舵2
‑
2对测试组合体5进行姿态调整;当测试组合体5达到预定高度、速度、姿态后,任务控制段2与参试高速飞行器3分离,参试高速飞行器3开始终末段实验,任
务控制段2开始减速并最终通过降落伞舱2
‑
4中的降落伞安全降落;实验过程中的实验数据由参试高速飞行器3自身测量装置和测控子系统4采集并分析。
8.本发明还可以包括:
9.所述的测控子系统4包括测控站4
‑
1、定位基站4
‑
2和测量记录仪4
‑
3;所述的测控站4
‑
1发出控制指令,记录、处理、显示实验中的实时信息;所述的定位基站4
‑
2为固定翼无人机1、任务控制段2和参试高速飞行器3提供精确定位;所述的测量记录仪4
‑
3记录实验中的数据。
10.所述的固定翼无人机1包括机身1
‑
1、动力系统1
‑
3、飞行控制器1
‑
5和起落架1
‑
7;所述的机身1
‑
1中部两侧设有机翼1
‑
2,机身1
‑
1尾部设有水平尾翼与垂直尾翼1
‑
4;所述的动力系统1
‑
3对称位于两侧机翼1
‑
2中部;所述的飞行控制器1
‑
5位于机身1
‑
1背部,用于固定翼无人机1的飞行控制、定位、与测控子系统4通讯;所述的起落架1
‑
7为前三点式,后起落架位于动力系统1
‑
3下部。
11.本发明的目的还在于提供一种基于固定翼无人机的高速飞行器终末段综合实验方法。
12.本发明的目的通过如下技术方案来实现:包括以下步骤:
13.步骤1:准备基于固定翼无人机的高速飞行器终末段综合实验系统;
14.所述的基于固定翼无人机的高速飞行器终末段综合实验系统包括固定翼无人机1、任务控制段2、参试高速飞行器3和测控子系统4;所述的固定翼无人机1的机身中部设有空投舱,空投舱门1
‑
6位于机身正下方;所述的任务控制段2包括任务控制段主体2
‑
1;所述的任务控制段主体2
‑
1整体为圆柱壳,在任务控制段主体2
‑
1首端设有法兰连接板安装壁,在任务控制段主体2
‑
1尾端设有尾封板2
‑
8,在任务控制段主体2
‑
1内部设有推进发动机2
‑
3、降落伞舱2
‑
4和控制器2
‑
5,在任务控制段主体2
‑
1后部外侧设有四个格栅气动舵安装槽,在格栅气动舵安装槽中安装有格栅气动舵2
‑
2,四组格栅气动舵2
‑
2沿任务控制段主体2
‑
1周向均匀分布;所述的推进发动机2
‑
3的喷口由尾封板2
‑
8中部开孔伸出;、
15.步骤2:将参试高速飞行器3与任务控制段2通过导流板2
‑
6和连接法兰2
‑
7组合成测试组合体5,将测试组合体5置于固定翼无人机1的空投舱中;
16.所述的连接法兰2
‑
7一端固定于任务控制段主体2
‑
1首端的法兰连接板安装壁,另一端与参试高速飞行器3尾部连接;所述的导流板2
‑
6一端安装于任务控制段主体2
‑
1首部,另一端紧密贴在参试高速飞行器3尾部,实现任务控制段2与高速飞行器3之间的气动外形光滑过渡;
17.步骤3:开始高速飞行器终末段实验,通过测控子系统4控制固定翼无人机1飞行至指定空域;
18.步骤4:通过测控子系统4控制固定翼无人机1打开空投舱门1
‑
6将测试组合体5抛离,而后固定翼无人机1返航;
19.步骤5:测试组合体5飞离固定翼无人机1至安全距离后,任务控制段2中的推进发动机2
‑
3开始工作,将测试组合体5加速至实验速度,在加速过程中通过格栅气动舵2
‑
2对测试组合体5进行姿态调整;
20.步骤6:当测试组合体5达到预定高度、速度、姿态后,任务控制段2与参试高速飞行器3分离,参试高速飞行器3开始终末段实验,任务控制段2开始减速并最终通过降落伞舱2
‑
4中的降落伞安全降落;实验过程中的实验数据由参试高速飞行器3自身测量装置和测控子系统4采集并分析。
21.本发明还可以包括:
22.所述的测控子系统4包括测控站4
‑
1、定位基站4
‑
2和测量记录仪4
‑
3;所述的测控站4
‑
1发出控制指令,记录、处理、显示实验中的实时信息;所述的定位基站4
‑
2为固定翼无人机1、任务控制段2和参试高速飞行器3提供精确定位;所述的测量记录仪4
‑
3记录实验中的数据。
23.所述的固定翼无人机1包括机身1
‑
1、动力系统1
‑
3、飞行控制器1
‑
5和起落架1
‑
7;所述的机身1
‑
1中部两侧设有机翼1
‑
2,机身1
‑
1尾部设有水平尾翼与垂直尾翼1
‑
4;所述的动力系统1
‑
3对称位于两侧机翼1
‑
2中部;所述的飞行控制器1
‑
5位于机身1
‑
1背部,用于固定翼无人机1的飞行控制、定位、与测控子系统4通讯;所述的起落架1
‑
7为前三点式,后起落架位于动力系统1
‑
3下部。
24.本发明的有益效果在于:
25.本发明通过采用固定翼无人机为高速飞行器终末段实验系统的基础平台,大幅降低了实验费用、缩短了实验周期,为开展大量实验奠定了基础;通过引入任务控制段,满足了高速飞行器终末段飞行实验对飞行速度和飞行姿态初始条件的要求。整个实验系统具有实验成本低、实验周期短、实验效费比高、实验效果好等优点,能够为高速飞行器的设计研发以及技术快速迭代提供实验手段,还可为高速飞行器终末段飞行涉及的基础科学问题研究提供一种全新有效的研究途径。
附图说明
26.图1为本发明中固定翼无人机的示意图。
27.图2为本发明中测试组合体的示意图及其拆分图。
28.图3为本发明中测控子系统的示意图。
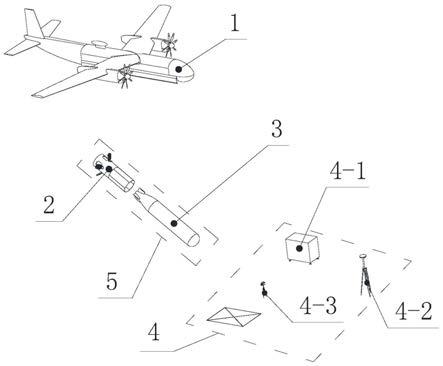
29.图4为本发明的整体实验流程示意图。
具体实施方式
30.下面结合附图对本发明做进一步描述。
31.本发明提供了一种基于固定翼无人机的高速飞行器终末段综合实验系统,该系统由固定翼无人机、任务控制段、测控子系统及高速飞行器组成。任务控制段安装于高速飞行器尾部,组成测试组合体。测试组合体由固定翼无人机运至指定空域,并在投放点将测试组合体投放,而后固定翼无人机返航。任务控制段发动机将测试组合体推至实验所需飞行速度,测试组合体的飞行姿态由任务控制段的格栅气动舵调整、控制。在任务控制段的控制下,测试组合体飞行至实验所需测试速度、飞行姿态、高度后,任务控制段与高速飞行器分离,高速飞行器开始终末段实验。分离后的任务控制段通过自身减速机构减速至安全速度后,以伞降方式降落至地面或水面。整个高速飞行器终末段实验数据由高速飞行器自身测试设备和测控子系统记录、分析,完成高速飞行器终末段综合实验任务。整个实验过程的飞行控制由测控站发出,空间定位由定位基站提供。本发明能够为高速飞行器终末段综合实验提供一个经济、便捷、高效的实验平台和系统,加快相关高速飞行器的设计和研发,并为
高速飞行器终末段涉及的基础科学问题研究提供一种新的研究途径。
32.一种基于固定翼无人机的高速飞行器终末段综合实验系统,包括固定翼无人机1、任务控制段2、高速飞行器3、测控子系统4。
33.固定翼无人机1含有:机身1
‑
1、机翼1
‑
2、动力系统1
‑
3、水平尾翼与垂直尾翼1
‑
4、飞行控制器1
‑
5、空投舱门1
‑
6、起落架1
‑
7;所述机翼1
‑
2对称安装在机身1
‑
1两侧,机翼1
‑
2翼根位于机身1
‑
1上方;所述水平尾翼与垂直尾翼1
‑
4位于机身尾部;所述动力系统1
‑
3位于机翼1
‑
2中部;所述机身1
‑
1下部开有空投舱门1
‑
6;所述飞行控制器1
‑
5位于机身1
‑
1后背部,用于控制固定翼无人机1及与测控子系统4通讯;所述起落架1
‑
7为前三点式,安装于机身1
‑
1、动力系统舱1
‑
3上。
34.任务控制段2含有任务控制段主体2
‑
1、格栅气动舵2
‑
2、推进发动机2
‑
3、降落伞舱2
‑
4、控制器2
‑
5、导流板2
‑
6、连接法兰2
‑
7、尾封板2
‑
8;任务控制舱舱体2
‑
1为一圆柱壳,首部设有连接法兰2
‑
7安装壁,尾部设有尾封板2
‑
8,尾封板2
‑
8中间开有圆孔;4个格栅气动舵2
‑
2位于任务控制段主体2
‑
1后部,周向四等分布,通过气动舵舵轴实现收放与旋转;推进发动机2
‑
3置于任务控制段主体2
‑
1内部,喷口通过尾封板2
‑
8中间孔伸出舱外;降落伞舱2
‑
4位于主体2
‑
1内部,内置有降落伞,降落伞可通过主体2
‑
1上的降落伞舱口抛出舱外;控制器2
‑
5位于任务控制段主体2
‑
1内部,用于控制格栅气动舵2
‑
2、推进发动机2
‑
3及与测控子系统4通讯;导流板2
‑
6为矩形圆片,多个导流板组成过渡圆壳,保证任务控制段2、高速飞行器3之间的气动外形光滑过渡;连接法兰2
‑
7位于任务控制段主体2
‑
1首部,用于连接任务控制段2、高速飞行器3,并可用于两者的分离;
35.高速飞行器3内部带有实验模块、信息记录仪等实验所需设备,通过连接法兰2
‑
7与任务控制段2相连,组成测试组合体5;
36.测控子系统4含有:测控站4
‑
1、定位基站4
‑
2、测量记录仪4
‑
3;测控站4
‑
1具备与固定翼无人机1、任务控制段2及高速飞行器3之间的通讯,实现整个实验任务的控制;定位基站4
‑
2放置于地面或水面固定基点上,固定翼无人机1、任务控制段2及高速飞行器3间可基于定位基站4
‑
2,实现高精度空间定位;测量记录仪4
‑
3主要包括高速光学测量以及环境载荷测量,用于观测、记录高速飞行器3的飞行姿态,飞行器3与空气、靶标结构、水之间的相互作用过程,以及其他载荷场的测量与记录;
37.由任务控制段2和高速飞行器3组成的测试组合体挂载于固定翼无人机1空投货舱内部,固定翼无人机1在测控站4
‑
1的控制下起飞并飞至预定空域。空投舱门1
‑
6打开,投放测试组合体5,固定翼无人机1返航并降落。测试组合体5飞离固定翼无人机1至安全距离后,推进发动机2
‑
3开始工作,测试组合体5加速至实验预定空速。在此过程中,格栅气动舵2
‑
2对测试组合体5进行姿态调整,保证高速飞行器3飞行姿态满足实验要求。将高速飞行器助推至实验要求空速、飞行姿态、高度后,任务控制段2与高速飞行器3分离,任务控制段2通过自身减速机构减速至安全空速,而后打开降落伞安全降落。高速飞行器3开始终末段实验,相关实验数据由其本身的信息记录仪和测量记录仪4
‑
3记录,完成整个高速飞行器3终末段实验任务
38.实施例1:
39.本发明采用大型固定翼无人机平台,达到降低高速飞行器终末段实验成本、缩短实验周期。通过在高速飞行器尾部加设任务控制段,满足高速飞行器终末段飞行实验对高
飞行速度、精确飞行姿态的要求。进而,满足高速飞行器终末段突防技术研发和装备设计制造过程所需的大量相关实验需求。
40.整个综合实验系统包括固定翼无人机、任务控制段、测控子系统以及参试高速飞行器;
41.固定翼无人机机身中部设有空投货舱,舱门位于机身正下方,货舱内设有挂架,所述固定翼无人机动力系统位于机翼上,起落架采用前三点式,后起落架位于动力系统舱下部,所述固定翼无人机飞行控制器位于机身背部;
42.任务控制段包括控制段主体、格栅气动舵、推进发动机、降落伞舱、控制器、导流板、连接法兰以及尾封板等组件,控制段主体为一圆柱壳,首端设有连接法兰安装壁,尾部设有尾封板,推进发动机置于控制段主体内部并与之固定,推进发动机喷口穿过尾封板伸出控制段主体之外,任务控制段主体上设有四个格栅气动舵,在控制段主体上周向四等分布,任务控制段控制器位于主体内部,降落伞舱位于任务控制段主体内,降落伞舱内设有降落伞,降落伞可通过任务控制段主体上的降落伞舱口抛出,连接法兰位于法兰安装壁上,导流板为矩形圆柱壳片,安装于任务控制段首部;
43.高速飞行器与所述任务控制段通过连接法兰相连接组成测试组合体,所述高速飞行器与所述任务控制段之间的过渡气动外形由导流板保证。
44.测控子系统包括测控站、测量记录仪、定位基站等组件,测控站位于地面或水面上,距高速飞行器靶区一定安全距离,定位基站位于地面或水面固定基点上,测量记录仪置于高速飞行器靶区内观测区,并加以防护;
45.在开始高速飞行器终末段实验之前,由所述高速飞行器与所述任务控制段连接构成的测试组合体置于所述固定翼无人机空投货舱内部,所述固定翼无人机将测试组合体运至指定空域,并打开空投舱门将测试组合体抛离,而后所述固定翼无人机返航,测试组合体飞离所述固定翼无人机至安全距离后,所述任务控制段推进发动机开始工作,将测试组合体加速至实验速度,所述任务控制段格栅气动舵在加速过程中对测试组合体进行姿态调整,当测试组合体达到预定高度、速度、姿态后,所述任务控制段与所述高速飞行器分离,所述高速飞行器开始终末段实验,所述任务控制段开始减速并最终通过降落伞安全降落,实验过程中的相关实验数据由所述高速飞行器自身测量装置和所述测控子系统采集并分析,进而完成所述高速飞行器终末段综合实验任务,整个实验任务由所述测控子系统的测控站控制,空间定位、导航由所述测控子系统的定位基站完成。
46.与现有技术相比,本发明的有益效果是:本发明提供一种基于固定翼无人机的高速飞行器终末段综合实验系统,通过采用固定翼无人机为高速飞行器终末段实验系统的基础平台,大幅降低了实验费用、缩短了实验周期,为开展大量实验奠定了基础;通过引入任务控制段,满足了高速飞行器终末段飞行实验对飞行速度和飞行姿态初始条件的要求。整个实验系统具有实验成本低、实验周期短、实验效费比高、实验效果好等优点,能够为高速飞行器的设计研发以及技术快速迭代提供实验手段,还可为高速飞行器终末段飞行涉及的基础科学问题研究提供一种全新有效的研究途径。
47.实施例2:
48.附图1为本发明的固定翼无人机1示意图,主要用于将测试组合体5运至预定空域并抛离,为整个高速飞行器3的终末段飞行实验提供基础条件。固定翼无人机1主要包括机
身1
‑
1、机翼1
‑
2、动力系统1
‑
3、水平尾翼与垂直尾翼1
‑
4、飞行控制器1
‑
5、空投舱门1
‑
6、起落架1
‑
7。机翼1
‑
2位于机身1
‑
1上部,水平尾翼与垂直尾翼1
‑
4位于机身1
‑
1后部,动力系统1
‑
3对称位于机翼1
‑
2中部。起落架1
‑
7为前三点式,后起落架位于动力系统1
‑
3下部。机身1
‑
1中部为空投货舱,下部开有空投舱门1
‑
6。飞行控制器1
‑
5位于机身1
‑
1背部,用于固定翼无人机1的飞行控制、定位、与测控站4
‑
1通讯。
49.附图2为本发明的任务控制段2和高速飞行器3组成的测试组合体5的示意图及其拆分图。任务控制段2主要用于加速测试组合体5,并对测试组合体5飞行姿态进行调整,为高速飞行器3终末段实验提供飞行速度、飞行姿态初始条件。任务控制段2主要包括任务控制段主体2
‑
1、格栅气动舵2
‑
2、推进发动机2
‑
3、降落伞舱2
‑
4、控制器2
‑
5、导流板2
‑
6、连接法兰2
‑
7、尾封板2
‑
8。任务控制段主体2
‑
1为一圆柱壳,是任务控制段2的主体以及其他设备的安装基础,在其首端设有法兰连接板安装壁。在任务控制段主体2
‑
1内部安装有推进发动机2
‑
3,推进发动机2
‑
3的喷口由位于任务控制段主体2
‑
1尾部的尾封板2
‑
8中部开孔伸出,用于加速推进测试组合体5。在任务控制段主体2
‑
1后部外侧设有四个格栅气动舵2
‑
2安装槽,格栅气动舵2
‑
2安装于该槽内。在测试组合体5运输过程中,格栅气动舵2
‑
2收缩在安装槽内。测试组合体5抛离后,格栅气动舵2
‑
2伸展出安装槽,实现对测试组合体5飞行姿态的调整。降落伞舱2
‑
4位于任务控制段主体2
‑
1内部,舱内设有降落伞,降落伞可通过任务控制段主体2
‑
1上的降落伞舱口抛出。任务控制段主体2
‑
1内部的控制器2
‑
5用于任务控制段2的飞行控制、定位、与测控站4
‑
1通讯。
50.连接法兰2
‑
7一端固定于任务控制段主体2
‑
1首部法兰安装壁,另一端与高速飞行器3尾部相互连接,实现任务控制段2与高速飞行器3之间的固定。同时,连接法兰2
‑
7也可快速解除任务控制段2与高速飞行器3之间的连接,时间两者快速分离。导流板2
‑
6一端安装于任务控制段主体2
‑
1首部,另一端紧密贴在高速飞行器3尾部,实现任务控制段2与高速飞行器3之间的气动外形光滑过渡。
51.附图3为本发明测控子系统4的示意图。测控子系统4为本发明整个实验系统的测量与控制中心。测控子系统4主要包括测控站4
‑
1、定位基站4
‑
2、测量记录仪4
‑
3。测控站4
‑
1主要由中央控制计算机、地面通讯天线、电源以及测控箱组成,本发明所有的实验飞行控制均由中央控制计算机发出,飞行实验实时信息亦由中央控制计算机记录、处理、显示。定位基站4
‑
2为基于全球定位系统的地面定位基站,实验时固定于地面或水面固定基点,固定翼无人机1、任务控制器2、高速飞行器3可根据定位基站4
‑
2实现精确定位。测量记录仪4
‑
3由相机、传感器以及记录仪构成,在实验时用于高速飞行器飞行姿态、飞行速度,高速飞行器打靶、钻地、入水等实验信息的记录。
52.本发明的实验使用环境以及实验过程如附图4所示,具体实验环境设置和实验过程如下:
53.1.实验使用环境
54.根据高速飞行器3终末段实验目的设置不同的实验环境。(1)对于高速飞行器3终末段飞行实验,申请飞行空域,并在飞行空域边界设置明显警戒标识。放置定位基站4
‑
2,并建立空间定位坐标系。调整测控子系统4测量记录装置4
‑
3,使其能够满足高速飞行器3终末段全程飞行姿态捕捉;(2)对于高速飞行器3终末段打靶实验,以靶标为中心确定实验空域,申请飞行空域,并在飞行空域边界设置明显警戒标识。放置定位基站4
‑
2,建立空间定位坐
标系。调整测量记录仪4
‑
3,聚焦于靶标中心,并对测量记录仪4
‑
3进行防护,以保证仪器的安全;(3)对于高速飞行器3终末段钻地实验,在目标地面画上目标标识,并以此为中心申请飞行空域,并在飞行空域边界设置明显警戒标识。放置定位基站4
‑
2,建立空间定位坐标系。调整测量记录仪4
‑
3,聚焦于目标中心,同时在地面处放置其他传感器。并对测量记录仪4
‑
3所有仪器进行防护,以保证仪器的安全。(4)对于高速飞行器3入水实验,在目标海域放置漂浮目标标识,并以此为中心申请飞行空域,并在飞行空域边界设置明显警戒标识。定位基站放置于海域岸边地面或由海底伸出的固定基础上,并以此建立空间定位坐标系。将测量记录仪4
‑
3放置于测量船上或潜器上,聚焦于高速飞行器3入水目标海面,并在海域内放置其他传感器。
55.2.实验过程
56.根据高速飞行器3终末段实验任务需求,编写实验控制程序,并将该程序导入测控站4
‑
1中央控制计算机中。将任务控制段2与高速飞行器3通过连接法兰2
‑
7相互固定在一起,构成测试组合体5。根据任务控制段2与高速飞行器3之间的几何形状调整导流板2
‑
8,保证任务控制段2与高速飞行器3之间的气动外形光滑过渡。将测试组合体5挂载于固定翼无人机1空投货舱内。固定翼无人机1起飞,将测试组合体5带至预定空域。飞至预定空域后,打开空投舱门1
‑
6,抛投测试组合体5,而后固定翼无人机1返航。测试组合体5离开固定翼无人机1一定距离后,任务控制段2的推进发动机2
‑
3开启,加速测试组合体5至实验所需飞行速度,同时控制器2
‑
5控制器通过控制格栅气动舵2
‑
2调整测试组合体5至实验所需飞行姿态。而后任务控制段2的推进发动机2
‑
3关机,通过连接法兰2
‑
7解除任务控制段2与高速飞行器3的连接,任务控制段2与高速飞行器3分离,高速飞行器3进入终末段实验阶段。分离后的任务控制段2通过格栅气动舵2
‑
2减速至安全速度,而后降落伞舱口开启,降落伞从降落伞舱2
‑
4内抛出,任务控制段2伞降至地面或水面。高速飞行器3的终末段飞行实验数据一部分由其自身的测控设备记录,飞行姿态、速度以及高速飞行器穿靶、钻地、入水的过程信息由测控子系统4记录分析。备份实验数据,回收任务控制段2及高速飞行器3,完成整个实验。
57.综上,本发明涉及航空技术领域,具体为基于固定翼无人机的高速飞行器终末段综合实验系统。实验系统由固定翼无人机、任务控制段、高速飞行器、测控子系统组成,至少包括固定翼无人机机身、机翼、动力系统、水平尾翼与垂直尾翼、飞行控制器、空投舱门、起落架,任务控制段主体、格栅气动舵、推进发动机、降落伞舱、控制器、导流板、连接法兰、尾封板,高速飞行器,测控子系统测控站、定位基站、测量记录仪。通过连接法兰,任务控制段与高速飞行器固连在一起构成测试组合体,测试组合体由固定翼无人机运至预定空域而后抛投,固定翼无人机返航降落。抛投后的测试组合体在推进发动机与格栅气动舵的加速与调整下达到实验预定高度、空速,飞行姿态。而后任务控制段与高速飞行器分离,高速飞行器进入终末段实验阶段,任务控制段通过伞降降落至地面或水面。整个实验过程的飞行控制由测控站发出,空间定位由定位基站提供,实验过程记录及其它实验信息测量由测量记录仪完成,进而完成高速飞行器终末段综合实验任务。本发明能够为高速飞行器终末段综合实验提供一个经济、便捷、高效的实验平台和系统,加快相关高速飞行器的设计和研发,并为高速飞行器终末段涉及的基础科学问题研究提供一种新的研究途径。
58.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修
改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

