无人飞机
【技术领域】
1.本发明关于无人飞机。
背景技术:
2.先前已知有一种具备流体喷射喷嘴的无人飞机(例如,参照专利文献1)。专利文献1:日本特开2019
‑
18589号公报。
技术实现要素:
3.(发明所要解决的问题)先前的无人飞机,难以使喷射出的流体正确命中对象物。
4.(用于解决问题的手段)本发明的第1实施方式中提供一种无人飞机,可装载气胶容器,该无人飞机具备:吐出部(喷出部),其具有吐出口,且自吐出口吐出气胶容器的内容物;摄影机,其可对内容物的吐出范围加以摄影;信息取得部,其取得预先决定的信息;及,预想部,其基于由信息取得部所取得的信息,对内容物的命中预想位置加以预想。
5.摄影机,可由姿势控制机构所支持,该姿势控制机构具有使姿势成为可变的旋转自由度。
6.无人飞机可具备通讯部,该通讯部与监视器通讯,该监视器用来确认由摄影机所摄影中的影像。通讯部,可传送预想部所预想出的命中预想位置。
7.无人飞机可具备:瞄准部,其决定内容物的命中目标位置;及,吐出方向控制部,其以减少命中目标位置与命中预想位置的差异的方式,来控制吐出口的朝向。
8.吐出方向控制部可由姿势控制机构所支持,该姿势控制机构具有使姿势成为可变的旋转自由度。
9.吐出方向控制部,可控制无人飞机的姿势。
10.预想部可具备校正部,该校正部对预想部所预想的命中预想位置进行校正。
11.校正部,可对应于内容物的扩散量来给予校正量。
12.信息取得部,可取得内容物所命中的命中位置。校正部,可对应于命中位置与命中预想位置的差值来给予校正量。
13.信息取得部,可取得已被吐出的内容物的轨迹。校正部,可对应于内容物的轨迹来给予校正量。
14.信息取得部可具备距离传感器,该距离传感器取得吐出口与命中目标位置之间的距离。校正部,可给予与距离对应的校正量。
15.信息取得部可具备形状取得部,该形状取得部取得对象物的形状,该对象物是无人飞机要吐出前述内容物的对象。校正部,可给予与形状对应的校正量。
16.信息取得部可具有风力传感器,该风力传感器检测风向与风速。校正部,可基于风力传感器的检测结果来给予校正量。
17.无人飞机可具备飞行控制部,该飞行控制部控制无人飞机的飞行。校正部,可基于飞行控制部所算出的空速和对地速度(地速)的输出值来给予校正量。
18.无人飞机可具备吐出管制部,该吐出管制部对应于信息取得部所取得的信息,对内容物的吐出所伴随的自机污染的危险性加以评估,并进行吐出的警告或禁止的管制。
19.吐出管制部,可对应于吐出的警告或禁止而传送警告信息。
20.吐出部,可具有吐出内容物的喷嘴。吐出管制部,可对应于喷嘴的姿势来进行管制。
21.吐出管制部,可对应于吐出口与命中目标位置之间的距离来进行管制。
22.吐出管制部,可基于无人飞机的空速和对地速度的输出值来进行管制。
23.吐出管制部,可对应于风向和风速的至少其中一者来进行管制。
24.预想部,可使用内容物的弹道数据来对命中预想位置加以预想。
25.无人飞机,可具备收容构件,该收容构件用来保持气胶容器。
26.此外,上述发明内容并未列举出本发明的全部特征。又,该等特征群的子组合也可成为发明。
【附图说明】
27.图1a表示无人飞机100的正面图的一例。图1b表示图1a的无人飞机100的左侧视图的一例。图2a表示无人飞机100的正面图的另一例。图2b表示图2a的无人飞机100的左侧视图。图3表示容器保持部40的构成的一例。图4表示无人飞机100的操纵系统300的一例。图5表示无人飞机100的功能区块图的一例。图6a表示被吐出的内容物的轨迹与扩散范围的一例。图6b表示被吐出的内容物的水平方向的扩散范围的一例。图7a表示正在吐出内容物的无人飞机100的一例。图7b表示显示部210的显示画面的一例。图7c表示显示部210的显示画面的一例。图8a表示显示部210的显示画面的一例。图8b表示显示部210的显示画面的一例。图9a表示正在吐出内容物的无人飞机100的一例。图9b表示藉由显示部210的操作来进行的吐出控制方法的一例。图9c表示被加以姿势控制的无人飞机100的一例。图9d表示姿势控制后的显示部210的显示画面的一例。图10a表示正在吐出内容物的无人飞机100的一例。图10b表示与图10a的无人飞机100对应的显示部210的一例。图10c表示正在吐出内容物的无人飞机100的一例。图11a表示正在吐出内容物的无人飞机100的一例。图11b表示藉由无人飞机100来进行的校正方法的一例。
图11c表示在校正后正在吐出内容物的无人飞机100的一例。图12a表示基于轨迹152的吐出控制方法的一例。图12b表示使用了轨迹152的校正后的吐出的一例。图13a表示无人飞机100的构成的一例。图13b表示无人飞机100的飞行控制方法的一例。图13c表示无人飞机100的飞行控制方法的一例。图14a是表示无人飞机100的构成的区块图的一例。图14b表示无人飞机100的有可能造成自机污染的状态的一例。图14c是用来说明吐出管制部90的管制方法的一例的图。图14d是用来说明吐出管制部90的管制方法的一例的图。图14e表示禁止吐出时的显示部210的一例。
【具体实施方式】
28.以下,通过发明的实施方式来说明本发明,但以下的实施方式并不对申请专利范围的发明加以限定。又,发明的解决手段中并不一定需要实施方式中所说明的特征的全部组合。
29.图1a表示无人飞机100的正面图的一例。图1b表示图1a的无人飞机100的左侧视图的一例。
30.无人飞机100,是在空中飞行的飞行体。本例的无人飞机100具备:本体部10、推进部20、容器保持部40、吐出部50及信息取得部60。此外,本说明书中是将本体部10中的设有固定摄影机12的面称作无人飞机100的正面,但飞行方向并不限定于正面方向。
31.本体部10,容纳有无人飞机100的各种控制电路和电源等。又,本体部10,可作为连结无人飞机100的构成彼此的构造体来发挥功能。本例的本体部10,连结至推进部20。本例的本体部10,具备固定摄影机12。
32.固定摄影机12,设于本体部10的侧面。固定摄影机12,对无人飞机100的正面加以摄影。在一例中,由固定摄影机12拍摄下的影像被传送给无人飞机100的终端装置。无人飞机100的操纵者,可基于由固定摄影机12所拍摄下的影像来操作无人飞机100。又,无人飞机100的操纵者,可目视无人飞机100来进行操纵。此外,本例的固定摄影机12,对内容物的吐出(喷出)范围进行摄影。
33.推进部20,使无人飞机100推进。推进部20,具有旋转翼21和旋转驱动部22。本例的无人飞机100,具备4个推进部20。推进部20,经由腕部24而被安装于本体部10。此外,无人飞机100,亦可为具备固定翼的飞行体。
34.推进部20,藉由使旋转翼21旋转而获得推进力。旋转翼21,以本体部10为中心而设置有4个,但旋转翼21的配置方法并不限于本例。旋转翼21,经由旋转驱动部22而设于腕部24的前端。
35.旋转驱动部22,具有马达等的动力源来驱动旋转翼21。旋转驱动部22,可具有旋转翼21的制动机构。旋转翼21和旋转驱动部22,亦可省略腕部24而直接安装于本体部10。
36.腕部24,自本体部10以放射状的方式延伸设置。本例的无人飞机100,具备与4个推进部20对应设置的4个腕部24。腕部24,可为固定式亦可为可动式。腕部24,可固定有摄影机
等的其他构成。
37.容器保持部40,保持后述的容器150,该容器150中保存有内容物。容器保持部40,经由连结部42连结至本体部10。容器保持部40,亦可连结至腕部24或脚部15等的本体部10以外的构件。在一例中,容器保持部40,是收容容器150的筒状套筒。
38.容器保持部40的材料,只要是能够将收容容器150的收容部的形状加以保持的材料即可,并未特别加以限定。例如,容器保持部40的材料,包含铝等的金属、塑料或碳纤维等高强度且重量轻的素材。又,容器保持部40的材料并不限于硬质的材料,亦可包含软质的材料,例如硅氧橡胶或聚胺基甲酸酯发泡体等的橡胶材料。此外,容器保持部40,亦可具备用来对容器150进行加热或保温的加热机构。
39.连结部42,连结本体部10与容器保持部40。连结部42,可为固定式亦可为可动式。连结部42,可为用来在3轴方向控制容器保持部40的位置的平衡环架。在一例中,连结部42藉由移动容器保持部40的位置来调整吐出部50的吐出方向。此外,藉由将链接部42的规格加以统一,能够交换成可与容器150配合的任意的容器保持部40。藉此,能够与尺寸或种类不同的容器150对应。
40.吐出部50,与容器150连接并吐出容器150的内容物。内容物可为液体、气体或固体中的任一者。内容物,亦可为粉状、粒状或胶状等的状态。吐出部50,具有用来吐出内容物的喷嘴54。吐出部50,具有用来将容器150的内容物加以吐出的吐出口51。
41.信息取得部60,取得预先决定的信息。本例的信息取得部60,取得用于控制自吐出部50的吐出所必要的信息。例如,信息取得部60,具有距离传感器、形状取得部或是风力传感器。本例的信息取得部60,分别被设于2只脚部15。信息取得部60,亦可安装于腕部24等的其他构件上,或亦可内置于本体部10中。
42.脚部15,连接于本体部10,在着陆时保持无人飞机100的姿势。脚部15,在停止推进部20的状态下保持无人飞机100的姿势。本例的无人飞机100,具有2只脚部15。在脚部15上,亦可安装有容器保持部40。
43.图2a表示无人飞机100的正面图的另一例。图2b表示图2a的无人飞机100的左侧视图。本例的无人飞机100,与图1a和图1b的实施例不同的点在于,具备可动摄影机30。本例中,针对与图1a和图1b的实施例不同的点特别加以说明。
44.可动摄影机30,对无人飞机100周围的影像加以摄影。本例的可动摄影机30,被设在本体部10的下方。在一例中,所谓下方是指相对于本体部10与设有旋转翼21的一侧相反侧。可动摄影机30,与本体部10上所设置的固定摄影机12拍摄不同区域的影像。例如,可动摄影机30,为了控制自吐出部50的吐出,而取得比固定摄影机12更狭窄的区域的影像。又,可动摄影机30,在固定摄影机12对行进方向实行摄影时,可对吐出部50的吐出方向的影像进行摄影。此外,可动摄影机30,是可对内容物的吐出范围进行摄影的摄影机的一例。
45.本例的无人飞机100具备操纵用的固定摄影机12和吐出控制用的可动摄影机30,藉此使操纵者的操作变得容易。亦即,因为不需要切换操纵用的操作画面与吐出控制用的操作画面,能够防止操纵者的混乱。又,能够一边进行吐出控制一边轻易地掌握无人飞机100的周围状况。
46.连结部32,连结本体部10与可动摄影机30。连结部32,可为固定式亦可为可动式。在一例中,连结部32为姿势控制机构,该姿势控制机构具有使得可动摄影机30的姿势可改
变的旋转自由度。连结部32,可为用来在3轴方向控制可动摄影机30的位置的平衡环架。连结部32,可配合吐出部50的吐出方向来控制可动摄影机30的朝向。
47.连结部52,连结本体部10与吐出部50。连结部52,可为固定式亦可为可动式。连结部52,可为用来在3轴方向控制吐出部50的位置的平衡环架。在一例中,连结部52,藉由移动吐出部50的位置来调整吐出方向。在本例中,容器保持部40被固定于脚部15。
48.延伸部53,设置成自容器保持部40的容器150延伸到吐出部50。藉此,延伸部53能够将吐出部50配置在自容器保持部40分离的任意位置。据此,提高了无人飞机100的布局的自由度。又,藉由将吐出部50安装到平衡环架上,容易对吐出方向进行遥控。
49.信息取得部60,安装于可动摄影机30。在本例中,有2个信息取得部60安装于可动摄影机30。信息取得部60,可与图1a和图1b同样地安装于脚部15。信息取得部60,因为安装于被设在吐出部50附近的可动摄影机30,所以能够从更接近吐出部50的位置来取得信息。
50.又,无人飞机100,亦可具备复数个容器保持部40。复数个容器保持部40,可具有相同种类的容器150,亦可分别具有不同种类的容器150。
51.图3表示容器保持部40的构成的一例。图3表示容器保持部40的剖面图。容器保持部40,对容器150加以保持。本例的容器保持部40具备:本体41、第1端盖部43及第2端盖部44。本体41、第1端盖部43及第2端盖部44,构成用来保持容器150的收容构件。又,容器保持部40具备吐出驱动部80,该吐出驱动部80用来控制自容器150的吐出。
52.容器150,是藉由气体压力将已被填充于内部的内容物加以吐出的气胶容器。例如,容器150,藉由已被填充于内部的液化气体或压缩气体的气体压力来吐出内容物。本例的容器150是金属制的气胶罐。容器150,亦可为具有耐压性的塑料容器。容器150,以被容器保持部40加以收容的状态来被装载。容器150,不限于气胶容器,亦可为树脂制槽体。
53.此外,作为喷射剂,可使用碳氢化合物(液化石油气)(lpg)、二甲醚(dme)、氢氟烯烃(hfo
‑
1234ze)等的液化气体、二氧化碳(co2)、氮气(n2)、一氧化二氮(n2o)等的压缩气体。
54.本体41,具有比容器150更大口径的圆筒状形状。本例的本体41,被第1端盖部43和第2端盖部44夹住。
55.第1端盖部43,覆盖本体41的其中一方的端部。本例的第1端盖部43,覆盖容器150的喷射侧的端部。第1端盖部43,相对于本体41以可经由螺纹部45来拆装的方式螺入固定。本例的第1端盖部43,具有圆顶状的盖本体。第1端盖部43,考虑到气动特性而以直径朝向前端逐渐缩小的方式被加以缩径。第1端盖部43,其前端具有圆滑的圆锥状或圆顶状的曲面。藉由作成这样气动特性良好的形状,能够减低横风的影响并谋求飞行的稳定化。
56.第2端盖部44,在本体41中,覆盖第1端盖部43所覆盖的端部的另一方的端部。本例的第2端盖部44,覆盖容器150的喷射侧的相反侧的端部。第2端盖部44,与本体41一体地构成。又,第2端盖部44,亦可被设置成可自本体41拆卸。
57.吐出驱动部80,使内容物自容器150吐出。吐出驱动部80,被容纳在位于容器150的底部侧的第2端盖部44。第2端盖部44,作为吐出驱动部80的框体来发挥功能。吐出驱动部80具备:凸轮81、凸轮从动件82及可动板83。因为吐出驱动部80设于容器保持部40中,所以在交换容器150时不需要交换吐出驱动部80。
58.凸轮81,藉由驱动源而被旋转驱动。在一例中,使用马达来作为驱动源。凸轮81,具
有自旋转中心至外周为止的距离不同的构造。此外,在图示的例子中,凸轮81的形状被加以夸饰。凸轮81,在外周,与凸轮81从动件82接触。
59.凸轮从动件82,设于凸轮81与可动板83之间。凸轮从动件82,连接于凸轮81和可动板83,将凸轮81的旋转运动转换成直线运动并传达至可动板83。
60.可动板83,被设置为与容器150的底面相接,并控制容器150的阀口的开闭。可动板83,藉由凸轮从动件82而前后移动。例如,当凸轮81的旋转中心与凸轮从动件82所抵接的凸轮81的接触区域的距离较短时,可动板83相对容器150后退而使容器150的阀口关闭。另一方面,当凸轮81的旋转中心与凸轮从动件82所抵接的凸轮81的接触区域的距离较长时,可动板83相对容器150前进而使容器150的阀口开启。
61.此外,吐出驱动部80,虽然具有藉由凸轮机构来将马达的旋转运动转换成直线运动的构成,但并不限定于凸轮机构。例如,吐出驱动部80的机构,可具有螺旋进给机构、齿条
‑
齿轮(rack and pinion)等将马达的旋转运动转换成直线运动的机构。又,作为驱动源,可具备直线驱动用的线性马达或电磁螺线管(electromagnetic solenoid)等而非旋转马达。
62.阀杆145,设于容器150上。藉由利用致动器143来推压阀杆145,便可自容器150吐出内容物。致动器143,具有与吐出方向和吐出型态对应的流路。在一例中,致动器143将内容物形成雾状来吐出。
63.本例的容器150,是气胶容器,因此即便容器150已空,只要装载上新的容器150便能够容易进行交换。又,内容物不易附着于人体上因此交换时的安全性较高。
64.图4表示无人飞机100的操纵系统300的一例。本例的操纵系统300,具备无人飞机100及终端装置200。终端装置200,包含显示部210和控制器220。
65.显示部210,显示出无人飞机100所搭载的摄影机所拍摄下的影像。显示部210,可显示由固定摄影机12和可动摄影机30的各者所拍摄下的影像。例如,显示部210,以分割画面来显示固定摄影机12和可动摄影机30的影像。显示部210,可直接地与无人飞机100进行通讯,亦可经由控制器220间接地与无人飞机100进行通讯。显示部210,亦可与外部服务器连接。
66.控制器220,由利用者进行操作来操纵无人飞机100。控制器220,除了无人飞机100的飞行之外,可更指示藉由吐出部50进行内容物的吐出。控制器220,可藉由有线或无线方式来与显示部210连接。亦可设有复数个控制器220,以分别用于无人飞机100的操纵用与吐出部50的吐出控制用。
67.通讯部110,设于无人飞机100上。通讯部110,与显示部210或控制器220通讯。通讯部110,具有通讯用的天线。虽然本例的通讯部110被安装在本体部10的外面,但亦可内置于本体部10中。
68.此外,本例的利用者,是使用终端装置200以手动的方式操纵无人飞机100。然而,亦可并非手动而是藉由程序自动操纵。又,利用者,亦可不使用被显示在显示部210上的画面而直接目视操纵无人飞机100。又,亦可将无人飞机100的操纵交给自动控制,并且以手动方式来操作吐出部50的吐出。
69.图5表示无人飞机100的功能区块图的一例。本例的无人飞机100具备:固定摄影机12、可动摄影机30、信息取得部60、预想部70、瞄准部75及吐出方向控制部78。又,无人飞机
100,可具备飞行控制部120和存储部154。本例的预想部70,具有主预测部72和校正部74。
70.瞄准部75,决定内容物的命中目标位置102,并使吐出部50瞄准吐出对象602。关于吐出对象602将在之后叙述。例如,瞄准部75,藉由控制喷嘴54的姿势来将吐出方向朝向吐出对象602。又,瞄准部75,在预想部70已产生命中预想位置104的情况下,亦可对应于命中预想位置104来瞄准吐出对象602。
71.命中目标位置102,是希望使内容物命中的目标位置。命中目标位置102,可被操作为与吐出对象602一致。命中目标位置102的操作,可为自动方式亦可为手动方式。
72.预想部70,自信息取得部60输入信息。预想部70,基于藉由信息取得部60所取得的信息来预想内容物的命中预想位置104。预想部70,预想自吐出部50吐出的内容物的命中位置,并产生命中预想位置104。预想部70,可输入固定摄影机12或可动摄影机30所拍摄下的图像。此外,所谓命中,是指自吐出部50吐出的内容物到达对象物600的情形。关于吐出对象602将在之后叙述。本例的预想部70,具有主预测部72和校正部74。
73.命中预想位置104,是藉由预想部70所预想到的命中位置。命中预想位置104,可基于由信息取得部60所取得的信息来加以预想。例如,命中预想位置104,在以命中目标位置102为目标来控制吐出部50的情况下,为考虑到实际环境等的外部因素来预想的命中位置。命中预想位置104,可藉由通讯部110传送至显示部210。
74.主预测部72,基于被输入预想部70中的信息来产生命中预想位置104。在一例中,主预测部72,取得吐出部50的弹道数据,并产生与所装载的容器150对应的命中预想位置104。
75.所谓弹道数据,是指自容器150吐出的内容物的数据。例如,弹道数据,包含吐出速度、吐出后的内容物的轨迹及扩散范围。弹道数据,可为在不考虑外部环境的理想状态下的数据。弹道数据,可预先输入到预想部70中,亦可自容器150读取到、或是自服务器取得。弹道数据,亦可被存储在存储部154中、或亦可自外部输入。
76.例如,预想部70,使用弹道数据来预想命中预想位置104。在一例中,预想部70,在实际吐出前基于弹道数据来预想命中预想位置104。又,预想部70,亦可在实际吐出后,参考已实际吐出的弹道数据来预想命中预想位置104。
77.校正部74,对预想部70所预想的命中预想位置104加以校正。本例的校正部74,藉由对主预测部72所产生的命中预想位置104加以校正,来提高命中预想位置104的精确度。校正部74,对应于来自信息取得部60的信息来产生校正值,并基于该校正值来校正命中预想位置。例如,校正部74,对应于内容物的扩散量、风力传感器的检测结果、或与对象物600之间的距离等来给予校正量。又,校正部74,亦可给予与藉由形状取得部所取得的对象物600的形状对应的校正量。关于校正部74的具体校正方法将在之后叙述。
78.飞行控制部120,控制无人飞机100的飞行。飞行控制部120,在一例中是飞行控制器。例如,飞行控制部120,控制无人飞机100的对地速度、空速及高度。飞行控制部120,将用于飞行控制的数据传送至预想部70。
79.存储部154,存储弹道数据等的信息,并将所存储的信息传送至预想部70。存储部154,可存储实际吐出时的弹道数据。藉由以存储部154来存储关于容器150的信息,在交换容器150后仍然能够实现使用前次弹道数据来进行命中预想位置104的预想。
80.吐出方向控制部78,控制吐出部50的吐出方向。吐出方向控制部78,可控制吐出部
50的位置,亦可控制无人飞机100的姿势、或是亦可藉由该等的组合来控制吐出方向。在一例中,吐出方向控制部78,对应于容器150的残量来控制吐出口51的朝向。本例的吐出方向控制部78,以减少命中目标位置102与命中预想位置104之间的差异的方式来控制吐出口51的朝向。
81.图6a表示被吐出的内容物的轨迹与扩散范围的一例。纵轴表示自吐出口51算起的垂直位置,横轴表示自吐出口51算起的水平距离。实线表示被吐出的内容物的喷射轨迹。虚线表示被吐出的内容物的扩散范围。纵轴与横轴的交点是吐出口51的位置,在本例中变更吐出口51的朝向。
82.内容物,相对于吐出口51的水平面以预先决定的水平相对角度吐出。所谓水平相对角度,是表示吐出方向相对于水平面的角度。在本例中,分别以0度、30度及45度的水平相对角度来吐出内容物。当水平相对角度为0度时是朝水平方向吐出,当水平相对角度为90度时是垂直朝下吐出。以接近水平的角度来吐出时可使内容物的吐出距离延伸较长,但扩散范围增大,水平相对角度越接近90度越不容易扩散因此扩散范围变窄,但水平距离变短。
83.图6b表示被吐出的内容物的水平方向的扩散范围的一例。在本例中,是表示以0度的水平相对角度来吐出时的水平方向的扩散范围。被吐出的内容物,会相对于水平距离而向左右扩散。实线表示被吐出的内容物的喷射轨迹。虚线表示被吐出的内容物的扩散范围。本例的扩散范围,表示内容物相对于吐出方向而向左右扩散的范围。刚吐出后的扩散范围较窄,但扩散范围逐渐变宽。因为扩散范围会根据容器150或该内容物而有所不同,所以可针对每个容器150来取得扩散范围。
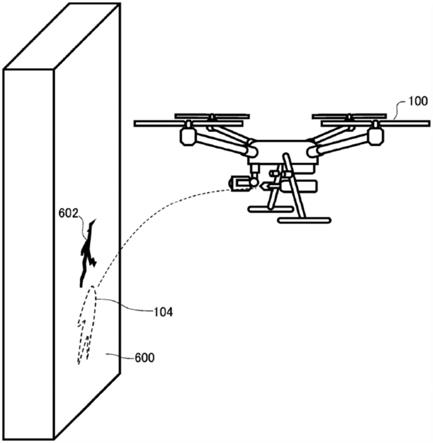
84.图7a表示正在吐出内容物的无人飞机100的一例。本例的无人飞机100,以对象物600的吐出对象602为目标而自吐出部50吐出内容物。无人飞机100,具备可动的可动摄影机30与固定的吐出部50。
85.对象物600,是无人飞机100拿来作为吐出内容物的对象的物体。本例的对象物600是柱子,但不限定于此例。对象物600亦可为建筑物、墙壁、隧道、电线杆、招牌、桥梁、树木等。吐出对象602,是对象物600中的要对其吐出内容物的位置。本例的吐出对象602,是对象物600的缺损部分,要藉由无人飞机100涂布内容物来加以补修。本例的无人飞机100,因为命中预想位置104偏离到吐出对象602的左侧,所以要控制机体的姿势来对准吐出对象602。
86.图7b表示显示部210的显示画面的一例。本例的显示部210,显示图7a所表示的无人飞机100的操作时的操作画面。
87.显示部210,是用来随时对正在以无人飞机100的摄影机来拍摄的影像加以确认的监视器。预想部70所预想到的命中预想位置104,在影像上以可目视的状态来加以显示。中央位置212,表示显示部210的中央。中央位置212,在一例中是可动摄影机30的中央位置。
88.命中目标位置102,以十字的中心来加以表示。吐出部50,以命中目标位置102为目标来吐出内容物。命中预想位置104,考虑到内容物的扩散而被描绘成楕圆形。
89.命中位置106,是实际被吐出的内容物命中对象物600的位置。本例的命中位置106是以虚线来表示,表示假如吐出时会命中的位置。本例的命中位置106,皆位于命中预想位置104的楕圆的内侧。
90.图7c表示显示部210的显示画面的一例。本例的显示部210,具有利用者能够以手指来加以操作的触控面板。利用者,操作显示部210来使命中目标位置102对准吐出对象
602。本例的利用者,拖曳命中目标位置102来瞄准至吐出对象602。藉此,吐出部50便能够将内容物吐出至吐出对象602。此外,亦可藉由点击吐出对象602来自动瞄准至吐出对象602上。吐出方向控制部78,亦可执行机体的姿势控制或执行喷嘴54的姿势控制。
91.图8a表示显示部210的显示画面的一例。本例的显示部210,显示固定摄影机12所拍摄下的无人飞机100的周围影像。本例的固定摄影机12,对无人飞机100的行进方向进行摄影。能够藉由显示部210来掌握无人飞机100的周围状况。例如,显示部210中有直升机也就是飞行体700入镜,操纵者便能够留意周围的接近物。无人飞机100,可基于入镜到显示部210中的影像来自动控制飞行路径,亦可由利用者来手动操纵。
92.图8b表示显示部210的显示画面的一例。本例的显示部210,显示可动摄影机30所拍摄下的吐出部50的吐出方向的影像。可动摄影机30,能够一边摸索吐出对象一边锁定目标。吐出部50,被控制为使命中目标位置102移到可动摄影机30的摄影范围的任意位置。例如,若点击吐出对象602也就是猴子,吐出部50便以使命中目标位置102移向猴子的方式来加以控制。显示部210,亦可显示自机体到命中目标位置102为止的距离。
93.图9a表示正在吐出内容物的无人飞机100的一例。图中表示无人飞机100向对象物600的吐出对象602吐出内容物时的命中预想位置104。然而,命中预想位置104位于比吐出对象602更下方处。本例的无人飞机100,因为在实际吐出前基于命中预想位置来进行吐出控制,所以能够削减不必要的吐出。
94.图9b表示藉由显示部210的操作来进行的吐出控制方法的一例。利用者,将命中目标位置102向吐出对象602拖曳,以使命中目标位置102对准吐出对象602。又,亦可藉由点击吐出对象602来使命中目标位置102对准吐出对象602。
95.图9c表示被加以姿势控制的无人飞机100的一例。无人飞机100,藉由使命中目标位置102瞄准吐出对象602,来控制机体的姿势。亦即,吐出方向控制部78,藉由进行无人飞机100的机体的姿势控制来控制吐出部50的吐出方向。本例的吐出方向控制部78,以使命中预想位置104与吐出对象602一致的方式来使无人飞机100的机体上升。
96.图9d表示姿势控制后的显示部210的显示画面的一例。无人飞机100,藉由吐出方向控制部78所进行的姿势控制,来使命中目标位置102瞄准吐出对象602。藉此,内容物便被吐出到吐出对象602。此外,吐出方向控制部78,在机体的姿势控制之外,亦可更执行喷嘴54的姿势控制。
97.图10a表示正在吐出内容物的无人飞机100的一例。本例的无人飞机100,具备距离传感器62。无人飞机100,对应于与吐出对象602之间的距离来校正命中目标位置102。
98.距离传感器62,取得吐出口51与命中目标位置102之间的距离。距离传感器62,是信息取得部60的一例。例如,无人飞机100,测量距离传感器62与对象物600之间的距离。又,无人飞机100,亦可使用距离传感器62来算出吐出口51与对象物600之间的距离。
99.图10b表示与图10a的无人飞机100对应的显示部210的一例。命中目标位置102,藉由十字的交叉点来表示。在命中目标位置102的周围,作为命中预想位置104而表示有扩散范围。本例的校正部74,给予与由信息取得部60所取得的距离对应的校正量。例如,校正部74,预先取得与距离对应的内容物的扩散范围来作为数据,以校正扩散范围。藉此,即便在与对象物600之间的距离较远的情况下,仍然能够提高对吐出对象602的命中率。
100.图10c表示正在吐出内容物的无人飞机100的一例。本例的无人飞机100,具备形状
取得部66。形状取得部66,是信息取得部60的一例。
101.形状取得部66,取得对象物600的形状。对象物600的形状,包含对象物600的倾斜或凹凸起伏的情形。形状取得部66,具有以放射状设置的复数个距离传感器。本例的形状取得部66,具有3个距离传感器并取得对象物600的倾斜情形。
102.校正部74,给予与对象物600的形状对应的校正量。例如,校正部74,对应于对象物600的倾斜情形来校正内容物的吐出方向。藉此,无人飞机100,能够抑制由于对象物600的形状所造成的影响,而提高对吐出对象602的命中率。
103.图10c(a)表示当对象物600垂直时的吐出内容物的无人飞机100的一例。l1、l2、l3是距离传感器的各者与对象物600之间的距离。
104.图10c(b)表示当对象物600倾斜时的吐出内容物的无人飞机100的一例。l1’、l2’、l3’是距离传感器的各者与对象物600之间的距离。
105.在本例中,为了说明方便而设为l1=l1’。又,对象物600倾斜而满足l2>l2’和l3>l3’。如此,当对象物600倾斜时,若以与对象物600垂直时同样的设定来吐出内容物,则命中位置106会偏离。在本例中,对象物600倾斜时的命中位置106b比对象物600垂直时的命中位置106a更高。无人飞机100,利用形状取得部66来附加上与对象物600的形状对应的校正量,藉此能够抑制与对象物600的倾斜情形对应的误差,而提高命中率。
106.又,校正部74,可预先将与形状对应的内容物的扩散范围作为数据而加以取得,以校正扩散范围。藉此,可算出在对象物600的形状之外更考虑到内容物的扩散情形的校正量,而能够削减不必要的吐出。另一方面,当对象物600位于几乎垂直下方时,不同于朝向水平方向的吐出,重力对内容物的扩散造成的影响减少,所以能够更提高命中率。
107.此外,形状取得部66,并不限于复数个距离传感器,亦可为光学雷达(lidar),亦即连续地发射雷射并以高密度测量其反射点的三维位置的系统,或是亦可为立体摄影机,该立体摄影机藉由自复数个不同方向同时地拍摄对象物600,而能够一并记录到其景深方向的信息。又,即便对象物600的形状并非平面而是如球体的圆形面或是具有凹凸起伏的表面,也能够提高内容物的命中率。
108.图11a表示正在吐出内容物的无人飞机100的一例。无人飞机100,向对象物600的吐出对象602吐出内容物。然而,实际的命中位置106位在比吐出对象602更上方处。
109.图11b表示藉由无人飞机100来进行的校正方法的一例。本例的无人飞机100,藉由校正部74来校正命中位置106与吐出对象602的差值。
110.信息取得部60,取得内容物所命中的命中位置106。在一例中,信息取得部60,基于可动摄影机30所拍摄下的图像来取得命中位置106。信息取得部60,取得已对准到吐出对象602的命中预想位置104与实际的命中位置106之间的距离。
111.校正部74,基于命中预想位置104和命中位置106来算出校正量。在一例中,校正部74,对应于命中位置106与命中预想位置104的差值来给予校正量。校正部74,在命中位置106与命中预想位置104的差值越大的情况下,便以越大的校正量来控制机体的姿势或喷嘴54的姿势。
112.图11c表示在校正后正在吐出内容物的无人飞机100的一例。吐出方向控制部78,对应校正部74的校正量来控制吐出方向。命中预想位置104,藉由校正部74的校正而被校正到比校正前的命中位置106更下方。如此,吐出方向控制部78,进行控制来使得命中预想位
置104瞄准吐出对象602。本例的吐出方向控制部78,比校正前更使喷嘴54的姿势横躺,藉此使命中预想位置104对准吐出对象602。此外,吐出方向控制部78,在喷嘴54的姿势控制之外,亦可更执行机体的姿势控制。
113.图12a表示基于轨迹152的吐出控制方法的一例。本例的显示部210,表示吐出控制前的轨迹152。无人飞机100,向吐出对象602吐出内容物。本例的无人飞机100,虽然使命中目标位置102对准吐出对象602来进行吐出,但命中位置106偏离到吐出对象602的上方。信息取得部60,取得被吐出的内容物的轨迹152。例如,信息取得部60,自可动摄影机30取得轨迹152的影像。校正部74,对应于轨迹152来给予校正量。吐出方向控制部78,对应于校正部74所算出的校正量来控制自吐出部50的吐出方向。
114.图12b表示使用了轨迹152的校正后的吐出的一例。本例的显示部210,表示吐出控制后的轨迹152。藉由吐出方向控制部78的控制,被校正到使命中位置106与吐出对象602一致。本例的无人飞机100,藉由将可动摄影机30拍到的轨迹152用于校正控制,能够在实际吐出中进行校正。吐出方向控制部78,可自动控制吐出方向来使得命中目标位置102命中吐出对象602。例如,对显示部210所拍到的内容物的水流加以扫瞄,并确认命中目标位置102与吐出对象602的差值,以控制吐出部50的吐出方向。又,利用者,亦可一边目视轨迹152一边以手动方式使命中目标位置102对准吐出对象602。
115.本例的无人飞机100,一边藉由以固定摄影机12或可动摄影机30所拍摄到的影像来确认轨迹152,一边控制吐出方向。因此,无人飞机100,藉由使用轨迹152来控制吐出方向,能够提高对于吐出对象602的命中机率。又,无人飞机100只要具备摄影机即可,能够简化信息取得部60。
116.图13a表示无人飞机100的构成的一例。本例的无人飞机100,具备风力传感器64。
117.风力传感器64,检测无人飞机100周围的风向和风速。风力传感器64,是信息取得部60的一例。例如,风力传感器64是超音波风向风速计。本例的风力传感器64,被安装在本体部10的上部。风力传感器64,亦可设在脚部15等的本体部10以外的构件。风力传感器64,在无人飞机100飞行时可取得空速。
118.校正部74,基于风力传感器64的检测结果来给予校正量。藉此,预想部70,即便在风速较快的情况下,也可使内容物容易命中吐出对象602。无人飞机100,亦可对应风力传感器64的风速结果而禁止吐出。例如,在校正部74的校正量大于规定值时禁止吐出,并在小于规定值时准许吐出。
119.图13b表示无人飞机100的飞行控制方法的一例。本例的无人飞机100,使用飞行控制部120,藉由与风对应的飞行控制来控制对地速度。
120.飞行控制部120,算出空速和对地速度的输出值。飞行控制部120,控制无人飞机100的飞行来使对地速度成为零。飞行控制部120,为了使对地速度成为零,以朝向上风侧增加空速来使空速与风速相等的方式加以控制。藉由使对地速度成为零,可减低风对机体姿势造成的影响。在一例中,无人飞机100,使用gps(全球卫星定位)来取得对地速度。
121.图13c表示无人飞机100的飞行控制方法的一例。本例的无人飞机100,一边移动一边控制吐出。当无人飞机100的对地速度不为零时,吐出部50的吐出会受到惯性的影响。飞行控制部120,将算出的空速和对地速度的输出值输出到预想部70。校正部74,基于空速和对地速度的输出值,来校正惯性对吐出的影响。
122.图14a是表示无人飞机100的构成的区块图的一例。本例的无人飞机100,具备吐出管制部90。
123.吐出管制部90,对应于信息取得部60所取得的信息,对内容物的吐出所伴随的自机污染的危险性加以评估。吐出管制部90,对应于危险性的评估来进行吐出的警告或禁止的管制。吐出管制部90,藉由在显示部210上显示警告来对吐出加以警告。吐出管制部90,当要禁止吐出时,将吐出驱动部80的驱动锁住。吐出管制部90,对应于吐出的警告或禁止而发出警告信息。
124.图14b表示无人飞机100的有可能造成自机污染的状态的一例。本例的无人飞机100,以靠近对象物600也就是墙壁的距离的情况下进行飞行。本例的吐出管制部90,对应于吐出口51与命中目标位置102之间的距离来进行管制。例如,吐出管制部90,当距离对象物600较近时,在显示部210上显示警告并禁止吐出。
125.图14c是用来说明吐出管制部90的管制方法的一例的图。吐出部50,具有自吐出口51吐出内容物的喷嘴54。吐出管制部90,对应于喷嘴54的姿势来进行管制。例如,吐出管制部90,当吐出口51朝向上方时,判断为有自机污染的可能性。吐出管制部90,可自喷嘴54的姿势预测内容物的轨迹152,并评估自机污染的可能性。吐出管制部90,在吐出口51的方向之外,可更基于无人飞机100的速度来评估自机污染的可能性。吐出管制部90,当吐出口51的方向有自机污染的可能性时,对吐出加以警告或是禁止。
126.图14d是用来说明吐出管制部90的管制方法的一例的图。吐出管制部90,对应于风向和风速的至少其中一者进行管制。例如,吐出管制部90,当吐出口51要自下风侧朝向上风侧发射时,判断为有自机污染的可能性而禁止吐出。又,吐出管制部90,可基于无人飞机100的空速和对地速度的输出值来进行管制。在此情况下,吐出管制部90也是在基于无人飞机100的空速和对地速度的输出值而判断为有自机污染的可能性时禁止吐出。吐出管制部90,即便在要朝向上风侧进行吐出时,若根据空速和对地速度的输出值而判断没有自机污染的可能性时,可准许吐出。
127.图14e表示禁止吐出时的显示部210的一例。本例的显示部210,对利用者显示吐出的警告或是禁止。吐出管制部90,在要禁止吐出时将吐出锁住。吐出管制部90,在对吐出进行警告时,可自显示部210警告有自机污染的危险性,但可以不将吐出锁住。亦即,即便在显示了警告的情况下,仍可藉由利用者的判断来进行吐出。
128.以上使用实施方式说明了本发明,但本发明的技术性范围并不限定于上述实施方式中所记载的范围。本案所属技术领域中具有通常知识者能够明确理解到可对上述实施方式施加多种变更或改良。自申请专利范围能够明确理解到施加过这样的变更或改良的型态也被包含于本发明的技术性范围中。
129.应注意到,申请专利范围、说明书及图式中表示的装置、系统、程序及方法中的动作、手法、步骤及阶段等的各处理的执行顺序,只要没有特别明确表示「在
…
之前」、「先加以」等,并且并未将先前处理的输出用在后续处理,便能够以任意顺序来实现。关于申请专利范围、说明书及图式中的动作流程,即便为了方便而使用「首先」、「接着」等来加以说明,也并非意味着一定要以该顺序来实施。【符号说明】
130.10:本体部
12:固定摄影机15:脚部20:推进部21:旋转翼22:旋转驱动部24:腕部30:可动摄影机32:连结部40:容器保持部41:本体42:连结部43:第1端盖部44:第2端盖部45:螺纹部50:吐出部51:吐出口52:连结部53:延伸部54:喷嘴60:信息取得部62:距离传感器64:风力传感器66:形状取得部70:预想部72:主预测部74:校正部75:瞄准部78:吐出方向控制部80:吐出驱动部81:凸轮82:凸轮随动件83:可动板90:吐出管制部100:无人飞机102:命中目标位置104:命中预想位置106:命中位置110:通讯部120:飞行控制部
143:致动器145:阀杆150:容器152:轨迹154:存储部200:终端装置210:显示部212:中央位置220:控制器300:操纵系统600:对象物602:吐出对象700:飞行体
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

