1.本发明涉及飞行器设备技术领域,尤其是一种单发五旋翼飞行器。
背景技术:
2.今年来,航拍技术日渐完善,航拍飞行器也渐渐被运用到各行各业,包括探险,巡查,航拍,文娱等等。但目前市面上的航拍飞行器,基本全是有多少个旋转翼就需使用多少个电机启动,耗能较大,并且近年来的航拍飞行器普遍是采用内燃机作动力的多旋翼飞行器,但存在续航时间短、油门不好控制、可靠性以及灵活性差等问题。因此有必要研究一种航拍飞行器,在降低启动电机的数量的同时,还能降低耗能,绿色环保,增长航拍时间。
技术实现要素:
3.本发明克服了现有技术中的缺点,提供一种单发五旋翼飞行器,通过一个发动机即可带动多个旋转翼转动,减少发动机的数量,减轻机身重量,节约生产成本,续航能力强。
4.为了解决上述技术问题,发明是通过以下技术方案实现的:
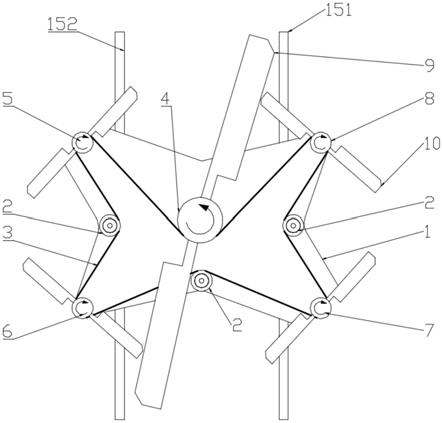
5.一种单发五旋翼飞行器,包括机身以及攻角调节器,所述机身设置有发动机,所述发动机与离合器连接,所述离合器与主动带轮连接;包括同步传动介质,所述机身边角上设置有第一从动带轮、第二从动带轮、第三从动带轮、第四从动带轮,所述同步传动介质均与所述主动带轮、第一从动带轮、第二从动带轮、第三从动带轮、第四从动带轮传动连接,还包括主旋转翼、副旋转翼,所述主动带轮与所述主旋转翼连接,所述第一从动轮、第二从动带轮、第三从动带轮、第四从动带轮上端分别设置有所述副旋转翼,所述机身上还设置有飞行控制器和舵机,所述飞行控制器与所述舵机、离合器电性连接,所述舵机与所述攻角调节器连接。
6.优选的,所述主旋转翼与所述机身的垂直距离大于所述副旋转翼与所述机身的垂直距离,所述主旋转翼旋转直径大于所述副旋转翼旋转直径。
7.优选的,所述机身上还转动连接有压轮,所述第一从动带轮与所述第二从动带轮之间、所述第二从动带轮与所述第三从动带轮之间、所述第三从动带轮与所述第四从动带轮之间分别设置有所述压轮。
8.优选的,所述压轮与所述同步传动介质传动连接。
9.优选的,所述同步传动介质是双面齿同步带、圆皮带或链条。
10.优选的,所述机身包括设置在下方的控制箱,所述发动机设置在所述控制箱内,所述控制箱上设置有摄像机,所述控制箱与机身固接。
11.优选的,所述控制箱四面安装有测距传感器。
12.优选的,所述机身上设置有第一起落架、第二起落架,所述第一起落架、第二起落架连接有驱动装置,所述驱动装置设置在所述机身内。
13.优选的,所述驱动装置包括电动马达、第一锥齿、第二锥齿、第三锥齿、第四锥齿、第五锥齿、第六锥齿,所述电动马达与机身固定连接,所述第二锥齿、第三锥齿、第四锥齿通
过转轴连接,所述转轴与所述机身转动连接,所述第二锥齿与所述第一锥齿啮合,所述第五锥齿固定连接在所述第一起落架上,所述第六锥齿固定连接在所述第二起落架上,所述第三锥齿与所述第五锥齿啮合,所述第四锥齿与所述第六锥齿啮合,所述电动马达与所述第一锥齿轴连接。
14.与现有技术相比,本发明的有益效果是:
15.本发明设置有一个发动机,发动机与离合器连接,离合器和主动带轮连接,还包括同步传动介质以及分布在机身上的第一从动带轮、第二从动带轮、第三从动带轮、第四从动带轮,同步传动介质均与主动带轮、第一从动带轮、第二从动带轮、第三从动带轮、第四从动带轮传动连接,主动带轮连接有主旋转翼,第一从动带轮、第二从动带轮、第三从动带轮、第四从动带轮上方分别连接有副旋转翼,当发动机启动后,发动机带动主动带轮转动,主动带轮带动主旋转翼,同时主动带轮通过同步传动介质带动第一从动带轮、第二从动带轮、第三从动带轮、第四从动带轮转动,从而带动第一从动带轮、第二从动带轮、第三从动带轮、第四从动带轮上的副旋转翼,使飞行器实现升降、飞行,本发明只需通过一个发动机即可带动5 个旋转翼转动,与传统飞行器相比,极大地减少了发动机的数量,从而减轻了机身的重量,达到降低耗能、节约制作成本的目的。同时采用燃油发动机,增强续航能力。
16.本发明设置有第一起落架、第二起落架连接有驱动装置,驱动装置包括电动马达、第一锥齿、第二锥齿、第三锥齿、第四锥齿、第五锥齿、第六锥齿,电动马达与机身固定连接,第二锥齿、第三锥齿、第四锥齿通过转轴连接,第二锥齿与第一锥齿啮合,第五锥齿固定连接在第一起落架上,第六锥齿固定连接在第二起落架上,第三锥齿与第五锥齿啮合,第四锥齿与第六锥齿啮合,电动马达与第一锥齿轴连接。本发明通过电动马达驱动第一锥齿、第二锥齿、第三锥齿、第四锥齿、第五锥齿、第六锥齿,可以带动第一起落架、第二起落架活动。在飞行器飞行途中,将第一起落架、第二起落架抬升,令第一起落架、第二起落架则在机身四周形成保护圈,防止飞行途中由于操作失误导致旋转翼直接撞击障碍物或地面;在飞行器降落时,将第一起落架、第二起落架放下,起支撑作用。
附图说明
17.附图用来提供对本发明的进一步理解,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制,在附图中:
18.图1为俯视角度的机身内部的结构示意图;
19.图2为本发明飞行状态的结构示意图;
20.图3为本发明降落状态的结构示意图;
21.图4为仰视角度的机身内部的结构示意图。
22.图中:1
‑
机身,2
‑
压轮,3
‑
同步传动介质,4
‑
主动带轮,5
‑
第一从动带轮,6
‑
第二从动带轮,7
‑
第三从动带轮,8
‑
第四从动带轮,9
‑
主旋转翼,10
‑
副旋转翼,1101
‑
攻角调节器,1102
‑ꢀ
舵机,12
‑
控制箱,13
‑
摄像机,14
‑
测距传感器,151
‑
第一起落架,152
‑
第二起落架,16
‑
电动马达,17
‑
转轴,18
‑
第一锥齿,19
‑
第二锥齿,20
‑
第三锥齿,21
‑
第四锥齿,22
‑
第五锥齿,23
‑ꢀ
第六锥齿。
具体实施方式
23.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
24.参与附图1
‑
4,一种单发五旋翼飞行器,包括机身1,机身1设置有发动机,发动机可以是电机或内燃机,机身1包括设置在下方的控制箱12,发动机设置在控制箱12内,控制箱 12上设置有摄像机13,控制箱12与机身1固接,发动机与离合器连接,离合器与主动带轮 4连接,包括同步传动介质3,以及分布在机身1边角上的第一从动带轮5、第二从动带轮6、第三从动带轮7、第四从动带轮8,同步传动介质3均与主动带轮4、第一从动带轮5、第二从动带轮6、第三从动带轮7、第四从动带轮8传动连接,机身1上还转动连接有压轮2,第一从动带轮5与第二从动带轮6之间、第二从动带轮6与第三从动带轮7之间、第三从动带轮7与第四从动带轮8之间分别设置有压轮2,压轮2与同步传动介质3传动连接。还包括主旋转翼9、副旋转翼10,主旋转翼9与机身1的垂直距离大于副旋转翼10与机身1的垂直距离,主旋转翼9旋转直径大于副旋转翼10旋转直径。主动带轮4与主旋转翼9连接,第一从动带轮5、第二从动带轮6、第三从动带轮7、第四从动带轮8上端分别设置有副旋转翼10。压轮2的设置一方面是用于力的传递作用,另一方面用于调整同步传动介质3的走向,从而改变旋转翼的转向。如图1所示,主动带轮4带动的主旋转翼9与第一从动带轮5、第二从动带轮6、第三从动带轮7带动副旋转翼10转向相反,从而令该飞行器可以稳定地升降,不会发生原地旋转的现象。
25.同步传动介质3是双面齿同步带、圆皮带或链条,在本实施例中,同步传动介质3采用双面齿同步带。
26.主旋转翼9、副旋转翼10上均连接有攻角调节器1101,机身1上还设置有飞行控制器和舵机1102,飞行控制器与舵机1102、离合器电性连接,舵机1102的转板与攻角调节器1101 连接,在操作过程中,通过飞行控制器控制舵机1102转板的运动,从而拉动攻角调节器1101,对旋转翼两端的叶片拉动调节角度,从而达到调节旋转翼转动时所产生风流的目的,有助于调节该飞行器的平衡,上述舵机1102、攻角调节器1101以及旋转翼的调节方式是现有技术,此处不做赘述。
27.控制箱12四面安装有测距传感器13,用于监测飞行器与周边环境的距离,控制飞行器的飞行速度和方向主动避开障碍物,避免发生撞机。
28.机身1上设置有第一起落架151、第二起落架152,第一起落架151、第二起落架152连接有驱动装置,驱动装置设置在机身1内。
29.驱动装置包括电动马达16、第一锥齿18、第二锥齿19、第三锥齿20、第四锥齿21、第五锥齿22、第六锥齿23,电动马达16通过螺丝与机身1固定连接,第二锥齿19、第三锥齿 20、第四锥齿21通过转轴17连接,转轴17与机身1转动连接,第二锥齿19与第一锥齿18 啮合,第五锥齿22固定连接在第一起落架151上,第六锥齿23固定连接在第二起落架152 上,第三锥齿20与第五锥齿22啮合,第四锥齿21与第六锥齿23啮合,电动马达16与第一锥齿18轴连接。电动马达16转动时带动第一锥齿18,第一锥齿18带动第二锥齿19转动,由于第二锥齿19、第三锥齿20、第四锥齿21为转轴17连接,第三锥齿20、第四锥齿21在第二锥齿19的带动下转动,第三锥齿20、第四锥齿21与分别驱动第五锥齿22、第六锥齿 23并带动第一起落架151、第二起落架152转动,且第一起落架151、第二起落架152转动方向相反。从而在飞行器飞行途中通过控制电动马达16抬升第一起落架151、第二起落架152 使飞行器四周形成保护圈,
在飞行器降落时通过控制电动马达16下放第一起落架151、第二起落架152起支撑作用。
30.本实施中,发动机与离合器连接,离合器与主动带轮4连接,飞行控制器与离合器电性连接,飞行控制器用于发动机与离合器的连接与分离,当发动机没电或没油时,通过飞行控制器控制发动机与离合器分离,令主动带轮4、第一从动带轮5、第二从动带轮6、第三从动带轮7、第四从动带轮8自由活动状态,协调各个旋转翼所产生的风流,使整个飞行器在处于协调平衡的状态下慢慢下降。
31.最后应说明的是:以上仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,但是凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

