1.本实用新型涉及机器人电池技术领域,特别涉及一种电池快换系统。
背景技术:
2.当前,移动机器人应用于酒店、写字楼、医院和室外等场景越来越普遍。移动机器人在室内或室外工作时(清扫、巡逻、消毒等),需要携带储能系统作为机器人提供动力源,目前主要以固定连接于机器人本体的锂电池、氢燃料电池等为主。锂电池能量密度低,充电速度慢,一段时间使用后,需要反复充电,大量占用移动机器人的使用时间;同时固定连接大容量电池包,增加了移动机器人重量,减少了移动机器人的有效载荷比。
技术实现要素:
3.有鉴于此,本实用新型提供一种电池快换系统,实现快速更换,减少充电造成的时间占用,有利于增加移动机器人有效荷载比。
4.一种电池快换系统,包括移动机器人以及连接在移动机器人上的第一电池锁紧机构和电池包,第一电池锁紧机构包括安装座、活动柱、锁紧块、回位弹性件和流体驱动器,安装座设有活动孔,活动柱的一端安装在活动孔中,活动柱的另一端与锁紧块连接,回位弹性件连接于安装座与活动柱之间,锁紧块包括锁固位和解锁位,流体驱动器用于向活动孔注入流体驱使锁紧块从锁固位移动至解锁位,回位弹性件依靠弹力可驱使锁紧块从解锁位移动至锁固位,电池包设有第一锁固孔,当锁紧块处于解锁位时,锁紧块能穿过第一锁固孔,当锁紧块处于锁固位时,锁紧块将电池包固定在移动机器人上。
5.在本实用新型的实施例中,上述活动孔的孔壁上设有螺旋槽,所述螺旋槽绕着所述活动孔的长度方向设置,所述活动柱的外壁设有滑块,所述滑块设置于所述螺旋槽中,当所述流体驱动器向所述活动孔注入流体时,所述活动柱通过所述滑块与所述螺旋槽配合向着远离所述安装座的方向旋转移动。
6.在本实用新型的实施例中,上述安装座包括固定部和支撑部,所述固定部设有容置孔,所述支撑部的一端固定在所述容置孔中,所述活动孔贯穿所述支撑部,所述固定部的底部设有通孔,所述通孔与所述容置孔、所述活动孔连通,所述流体驱动器通过所述通孔向所述活动孔注入流体。
7.在本实用新型的实施例中,上述容置孔的孔壁上设有安装槽,所述安装槽内安装密封圈,所述密封圈绕着所述支撑部的周向设置,并抵靠在所述支撑部上。
8.在本实用新型的实施例中,上述电池包包括第一固定板,所述第一锁固孔贯穿所述第一固定板,所述第一固定板设置在所述移动机器人上,所述锁紧块可压在所述第一固定板上实现锁固所述电池包。
9.在本实用新型的实施例中,上述移动机器人包括承载面,所述承载面上设有安装孔,所述安装座固定在所述安装孔内,所述承载面用于承载所述电池包。
10.在本实用新型的实施例中,上述承载面上设有定位挡块,所述定位挡块用于定位
所述电池包,当所述第一固定板设置在所述承载面上时,所述定位挡块的一侧抵靠于所述电池包。
11.在本实用新型的实施例中,上述电池快换系统还包括电池搬运装置和第二电池锁紧机构,所述第二电池锁紧机构连接在所述电池搬运装置上,所述第二电池锁紧机构与所述第一电池锁紧机构结构相同,所述电池包设有第二锁固孔,当所述第一电池锁紧机构解锁所述电池包时,所述电池搬运装置通过所述第二电池锁紧机构与所述第二锁固孔配合锁紧所述电池包,所述电池搬运装置用于将所述电池包搬离所述移动机器人。
12.在本实用新型的实施例中,上述电池搬运装置包括衡移机构,所述衡移机构包括第一衡移板、第二衡移板、第一衡移驱动器和第二衡移驱动器,所述第一衡移驱动器与所述第一衡移板连接,所述第一衡移驱动器用于驱使第一衡移板沿水平方向移动,所述第二衡移驱动器固定在所述第一衡移板上,所述第二衡移驱动器与所述第二衡移板连接,所述第二衡移驱动器用于驱使所述第二衡移板水平移动至所述电池包的上方,所述第二电池锁紧机构连接在所述第二衡移板上。
13.在本实用新型的实施例中,上述电池搬运装置包括升降机构,所述升降机构包括底座、升降架和升降驱动器,所述升降架沿竖直方向可活动地连接在所述底座上,所述升降驱动器固定在所述底座上,所述升降驱动器与所述升降架连接,所述升降驱动器用于驱使所述升降架沿竖直方向上下移动,所述第一衡移驱动器固定在所述升降架上,所述第一衡移板沿水平方向可活动地连接于所述升降架。
14.本实用新型的电池快换系统能够快速将充满电的电池包锁固在移动机器人上,同时能够快速解锁旧电池包,实现快速更换,减少充电造成的时间占用,提高移动机器人的综合使用效率;同时使用电池包快换设计,可减少电池包容量或质量,有利于增加移动机器人有效荷载比。
附图说明
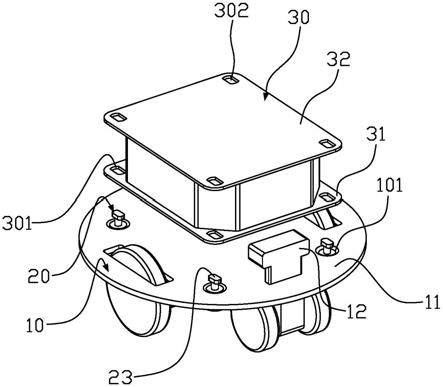
15.图1是本实用新型的电池快换系统的立体结构示意图。
16.图2至图5是将电池包锁固在移动机器人上的结构示意图。
17.图6和图7是本实用新型的第一电池锁紧机构或第二电池锁紧机构的结构示意图。
18.图8是本实用新型的第一电池锁紧机构或第二电池锁紧机构的拆分结构透视示意图。
19.图9是本实用新型的电池搬运装置的立体结构示意图。
20.图10是本实用新型的电池搬运装置的正视结构示意图。
21.图11和图12是本实用新型的电池搬运装置向外伸出的结构示意图。
22.图13是本实用新型另一实施例的移动机器人与第一电池锁紧机构的示意图。
具体实施方式
23.本技术提供了一种电池快换系统。
24.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分的实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人
员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
25.为了便于本领域技术人员的理解,本技术通过以下实施例对本技术提供的技术方案的具体实现过程进行说明。
26.图1是本实用新型的电池快换系统的立体结构示意图,图2至图5是将电池包锁固在移动机器人上的结构示意图,图6和图7是本实用新型的第一电池锁紧机构或第二电池锁紧机构的结构示意图,图8是本实用新型的第一电池锁紧机构或第二电池锁紧机构的拆分结构透视示意图,请参照图1至图8,电池快换系统包括移动机器人10以及连接在移动机器人10上的第一电池锁紧机构20和电池包30,第一电池锁紧机构20包括安装座21、活动柱22、锁紧块23、回位弹性件24和流体驱动器(图未示),安装座21设有活动孔201,活动柱22的一端安装在活动孔201中,活动柱22的另一端与锁紧块23连接,回位弹性件24连接于安装座21与活动柱22之间,锁紧块23包括锁固位和解锁位,流体驱动器用于向活动孔201注入流体驱使锁紧块23从锁固位移动至解锁位,回位弹性件24依靠弹力可驱使锁紧块23从解锁位移动至锁固位,电池包30设有第一锁固孔301,当锁紧块23处于解锁位时,锁紧块23能穿过第一锁固孔301,当锁紧块23处于锁固位时,锁紧块23将电池包30固定在移动机器人10上。
27.本实用新型的电池快换系统能够快速将充满电的电池包30锁固在移动机器人10上,同时能够快速解锁旧电池包30,实现快速更换,减少充电造成的时间占用,提高移动机器人10的综合使用效率;同时使用电池包30快换设计,可减少电池包30容量或质量,有利于增加移动机器人10有效荷载比。
28.具体地,当电池包30到达额定寿命、闲置状态电源维护时,需要将电池包30从移动机器人10上拆卸下来,此时流体驱动器向活动孔201注入流体驱使锁紧块23从锁固位移动至解锁位,回位弹性件24为拉伸,之后从移动机器人10上搬离电池包30,最后流体驱动器停止向活动孔201注入流体,回位弹性件24依靠弹力驱使锁紧块23从解锁位移动至锁固位;当需要将新电池包30安装在移动机器人10上时,首先流体驱动器向活动孔201注入流体驱使锁紧块23从锁固位移动至解锁位,将新电池包30搬运至移动机器人10的上方,保证第一锁固孔301与锁紧块23正对,之后将新电池包30放置在移动机器人10上,保证锁紧块23穿过第一锁固孔301,最后流体驱动器停止向活动孔201注入流体,回位弹性件24依靠弹力驱使锁紧块23从解锁位移动至锁固位,此时锁紧块23锁固电池包30。
29.进一步地,流体驱动器可向活动孔201注入液体或气体,根据实际需要可自由选择。
30.进一步地,回位弹性件24例如为拉簧,回位弹性件24设置在活动孔201内。
31.进一步地,电池快换系统包括四个第一电池锁紧机构20,分别对应电池包30的四个顶角设置,也就是说,每个第一电池锁紧机构20用于锁固电池包30的一个顶角,第一电池锁紧机构20排布方式简单,能够使电池包30固定牢固,不易发生过定位。在本实施例中,四个第一电池锁紧机构20的排布方式可根据实际需要自由选择,并不以此为限。
32.进一步地,锁紧块23呈长条状,第一锁固孔301的形状与锁紧块23的形状匹配,当锁紧块23处于解锁位时,锁紧块23的长度方向平行于第一锁固孔301的长度方向,或者锁紧块23的长度方向与第一锁固孔301的长度方向互成一较小的夹角,保证锁紧块23能顺利穿过第一锁固孔301为准,优选地,该夹角例如小于或等于5
°
。
33.进一步地,如图6、图7和图8所示,活动孔201的孔壁上设有螺旋槽202,螺旋槽202绕着活动孔201的长度方向设置,活动柱22的外壁设有滑块221,滑块221设置于螺旋槽202中,当流体驱动器向活动孔201注入流体时,活动柱22通过滑块221与螺旋槽202配合向着远离安装座21的方向旋转移动。当流体驱动器向活动孔201注入流体的过程中,活动柱22在液压的作用下逐渐向着远离安装座21的方向移动,同时活动柱22和锁紧块23在滑块221与螺旋槽202的作用下绕着轴线旋转,例如活动柱22和锁紧块23从锁固位移动至解锁位所旋转的角度为80
°
~110
°
,优选85
°
、90
°
、95
°
、100
°
。
34.进一步地,安装座21包括固定部211和支撑部212,固定部211设有容置孔203,支撑部212的一端固定在容置孔203中,活动孔201贯穿支撑部212,固定部211的底部设有通孔204,通孔204与容置孔203、活动孔201连通,流体驱动器通过通孔204向活动孔201注入流体。
35.进一步地,固定部211设有固定孔206以及与安装在固定孔206中的顶丝,固定孔206沿着垂直于安装座21轴线的方向设置,固定孔206的一端与容置孔203连通,固定孔206的另一端贯穿固定部211的外壁,当支撑部212安装在容置孔203中时,顶丝穿过固定孔206抵靠在支撑部212的外壁上,用以将支撑部212固定在固定部211上。
36.进一步地,容置孔203的孔壁上设有安装槽205,安装槽205内安装密封圈,密封圈绕着支撑部212的周向设置,并抵靠在支撑部212上。在本实施例中,密封圈利用由弹性材料制成,优选为橡胶、塑胶。
37.进一步地,电池包30包括第一固定板31,第一锁固孔301贯穿第一固定板31,第一固定板31设置在移动机器人10上,锁紧块23可压在第一固定板31上实现锁固电池包30。在本实施例中,第一固定板31上设有四个第一锁固孔301,四个第一锁固孔301分别位于电池包30的四个顶角。
38.进一步地,电池包30还包括第二固定板32,第二固定板32与第一固定板31上下相对设置,优选地,第二固定板32与第一固定板31平行且相对设置,第二固定板32上设有第二锁固孔302,第二锁固孔302贯穿第二固定板32,第二锁固孔302的轴线与第一锁固孔301的轴线重合。在本实施例中,第二固定板32上设有四个第二锁固孔302,四个第二锁固孔302分别位于电池包30的四个顶角。
39.进一步地,如图1和图2所示,移动机器人10包括承载面11,承载面11上设有安装孔101,安装座21固定在安装孔101内,承载面11用于承载电池包30。
40.进一步地,承载面11上设有定位挡块12,定位挡块12用于定位电池包30,当第一固定板31设置在承载面11上时,定位挡块12的一侧抵靠于电池包30。
41.进一步地,图9是本实用新型的电池搬运装置的立体结构示意图,图10是本实用新型的电池搬运装置的正视结构示意图,图11和图12是本实用新型的电池搬运装置向外伸出的结构示意图,如图1、图9、图10、图11和图12所示,电池快换系统还包括电池搬运装置40和第二电池锁紧机构50,第二电池锁紧机构50连接在电池搬运装置40上,第二电池锁紧机构50与第一电池锁紧机构20结构相同,当第一电池锁紧机构20解锁电池包30时,电池搬运装置40通过第二电池锁紧机构50与第二锁固孔302配合锁紧电池包30,电池搬运装置40用于将电池包30搬离移动机器人10。
42.进一步地,电池搬运装置40包括衡移机构41,衡移机构41包括第一衡移板411、第
二衡移板412、第一衡移驱动器413和第二衡移驱动器414,第一衡移驱动器413与第一衡移板411连接,第一衡移驱动器413用于驱使第一衡移板411沿水平方向移动,第二衡移驱动器414固定在第一衡移板411上,第二衡移驱动器414与第二衡移板412连接,第二衡移驱动器414用于驱使第二衡移板412水平移动至电池包30的上方,第二电池锁紧机构50连接在第二衡移板412上。在本实施例中,第一衡移驱动器413和第二衡移驱动器414均为电机。
43.进一步地,第一衡移板411上设有第一齿条4111,第一衡移驱动器413的驱动端设有第一齿轮4131,第一齿轮4131与第一齿条4111相互啮合;第二衡移板412上设有第二齿条4121,第二衡移驱动器414的驱动端设有第二齿轮4141,第二齿轮4141与第二齿条4121相互啮合。
44.进一步地,第二衡移板412设置于第一衡移板411的底部,第一衡移板411上设有第一滑槽401,第二衡移板412上设有第一滑轨4122,第一滑轨4122可滑动地安装在第一滑槽401中。
45.进一步地,电池搬运装置40包括升降机构42,升降机构42包括底座421、升降架422和升降驱动器423,升降架422沿竖直方向可活动地连接在底座421上,升降驱动器423固定在底座421上,升降驱动器423与升降架422连接,升降驱动器423用于驱使升降架422沿竖直方向上下移动,第一衡移驱动器413固定在升降架422上,第一衡移板411沿水平方向可活动地连接于升降架422。
46.进一步地,第一衡移板411上还设有第二滑槽402,升降架422上设有第二滑轨4221,第二滑轨4221可滑动地安装在第二滑槽402中。
47.进一步地,电池快换系统还包括电池传送装置60,电池搬运装置40设置于电池传送装置60的一侧,电池传送装置60用于传送电池包30,衡移机构41的第二衡移板412可移动至电池传送装置60的上方。
48.进一步地,电池传送装置60包括传送带61,传送带61上放置有多个充满电的电池包30,传送带61用于将电池包30传送至电池搬运装置40,同时将旧电池包30传送至充电位置或维修位置。
49.本实用新型的电池快换系统更换电池包30的步骤包括:
50.第一,移动机器人10移动至电池搬运装置40的一侧,衡移机构41通过第一衡移驱动器413驱使第一衡移板411向着移动机器人10移动,第二衡移驱动器414驱使第二衡移板412移动至电池包30的上方。
51.第二,升降机构42通过升降驱动器423驱使升降架422下降,同时第二电池锁紧机构50的流体驱动器向活动孔201注入流体驱使锁紧块23从锁固位移动至解锁位,当锁紧块23插入第二锁固孔302后,升降驱动器423停止驱动。
52.第三,流体驱动器停止向活动孔201注入流体,回位弹性件24依靠弹力驱使锁紧块23从解锁位移动至锁固位,此时锁紧块23锁固在电池包30上。
53.第四,第一电池锁紧机构20的流体驱动器向活动孔201注入流体驱使锁紧块23从锁固位移动至解锁位,此时第一电池锁紧机构20的锁紧块23解锁电池包30。
54.第五,升降驱动器423驱使升降架422上升,直至第一电池锁紧机构20的锁紧块23从第一锁固孔301中脱离出。
55.第六,衡移机构41通过第一衡移驱动器413驱使第一衡移板411向着电池传送装置
60移动,第二衡移驱动器414驱使第二衡移板412移动至电池传送装置60的上方。
56.第七,升降机构42通过升降驱动器423驱使升降架422下降,直至将电池包30放置在传送带61上。
57.第八,第二电池锁紧机构50的流体驱动器向活动孔201注入流体驱使锁紧块23从锁固位移动至解锁位,升降驱动器423驱使升降架422上升,直至第二电池锁紧机构50的锁紧块23从第二锁固孔302中脱离出。
58.第九,传送带61将充满电的电池包30传送至第二衡移板412的下方。
59.第十,升降驱动器423驱使升降架422下降,直至第二电池锁紧机构50的锁紧块23插入第二锁固孔302中,流体驱动器停止向活动孔201注入流体,回位弹性件24依靠弹力驱使锁紧块23从解锁位移动至锁固位,此时锁紧块23锁固在电池包30上。
60.最后,电池搬运装置40将充满电的电池包30搬运至移动机器人10上,并通过第一电池锁紧机构20将电池包30锁固即可。
61.图13是本实用新型另一实施例的移动机器人与第一电池锁紧机构的示意图,如图13所示,电池快换系统包括六个第一电池锁紧机构20,六个第一电池锁紧机构20呈六边形排布,器电池包30上设有六个第一锁固孔301。在本实施例中,六个第一电池锁紧机构20固定电池包30,结构应力更加均衡,每个锁紧位置受力较小,不易产生应力集中,使电池包30产生变形破坏。
62.值得一提的是,第一电池锁紧机构20的数量可根据实际需要自由选择,并不以上述为限。
63.不限于上述实施方式中的具体细节,在本技术的技术构思范围内,可以对本技术的技术方案进行多种简单变型,这些简单变型均属于本技术的保护范围。在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本技术对各种可能的组合方式不再另行说明。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
