本发明涉及道岔转换控制技术领域,具体而言涉及一种道岔控制电路及道岔控制系统。
背景技术:
随着各大城市对轨道交通需求的日益提高,地铁、轻轨、跨座式单轨以及胶轮有轨电车等轨道交通制式逐渐出现在大众视野之内,成为逐渐成为出行的首选交通工具。其中跨座式单轨、胶轮有轨电车等中低运量交通制式,具有造价低、工期短、占地面积小等优点,各类城市的建设需求日益提高。区别与传统的大铁、地铁,中低运量交通制式更注重于系统设备的轻量化和智能化。
道岔系统是使机车车辆从一股道转入另一股道的线路连接设备,在轨道交通线路上起着重要的作用。目前的跨座式单轨线路的道岔控制过程例如为:信号联锁系统向道岔系统下发操作指令,道岔系统控制驱动电机驱动摆臂转动,摆臂带动轨道梁移动到规定位置,轨道梁限位挡板触动限位开关,限位开关向道岔系统输出位置正确表示,道岔系统控制驱动电机停止驱动,道岔系统控制锁闭电机执行锁闭,锁闭电机带动机械结构完成机械动作,机械结构进入指定位置完成机械锁闭。在这种道岔系统中,道岔位置表示信号采用安全继电器输出,plc(programmablelogiccontroller,可编程逻辑控制器)驱动输出继电器,继电器动作条件为道岔到达要求位置并且道岔锁闭机构完成锁闭。道岔定位、反位、解锁、锁闭状态识别,通过在每个位置上设置行程开关,plc采集行程开关的触点来识别道岔状态。
这种道岔系统存在以下问题:
一,道岔的位置表示依靠道岔上的限位挡板触碰限位开关,来触发限位开关触点闭合输出信号,这种方式依靠机械碰撞的方式,对设备损坏较大,长期磨损后影响准确性;并且,由于行程开关裸露安装于室外,无任何防护措施,容易受到外界因素的影响,比如人为误碰、落物误碰等。
二,道岔执行解锁和锁闭动作时,首先需要限位开关将位置信息给道岔控制系统,道岔系统处理后,再由锁闭电路控制锁闭电机执行,这种方式需要在每个位置上设置行程开关,逻辑比较繁琐,电路设计比较复杂;并且,实际工程应用上线束繁多,设备安装和维护困难,成本较高;
三,不利于轨道交通智能化、信息化以及轻量化的发展。
因此有必要提出一种道岔控制电路及道岔控制系统,以解决上述问题。
技术实现要素:
针对现有技术的不足,本发明提出一种道岔控制电路及道岔控制系统,其可以减少各模块电路的交互节点,使控制逻辑更清晰简单,并且使用自动开闭器代替行程开关,相对每个位置安装行程开关降低了成本。
为了克服目前存在的问题,本发明一方面提供一种道岔控制电路,其包括:
转辙电路,所述转辙电路用于控制转辙电机完成道岔定位去反位或反位去定位操作;
锁闭电路,所述锁闭电路用于控制锁闭电机完成道岔解锁或锁闭;
表示电路,所述表示电路用于产生表示道岔位置的信号;以及
自动开闭器,所述自动开闭器包括多排接点,每排接点分别设置在所述转辙电路、锁闭电路和表示电路其中之一,所述自动开闭器与道岔连接,并且响应于道岔转辙位置和/或锁闭状态控制各排接点的导通,从而使转辙电路、锁闭电路和表示电路连通或断开。
在本发明的一个实施例中,还包括:
至少一个开关,每个所述开关设置在转辙电路锁闭电路和表示电路其中之一中,并且所述开关的两个接点通过所述自动开闭器的一组接点连接,从而使得所述开关响应于所述自动开闭器的该组接点的导通而导通。
在本发明的一个实施例中,所述自动开闭器包括第一至第八排接点,每排接点包括第1和第2组接点,每组接点包括两个接点,至少一个开关包括第一至第三开关,每个所述开关包括两个接点,其中,
第一排接点的第1组接点设置在执行电源正极与转辙电机的第一正极接点之间,第一排接点的第2组接点与第三排接点的第2组接点串联构成所述表示电路的第一支路;
第二排接点的第1组接点设置在执行电源正极与锁闭电机的第一正极接点之间,第二排接点的第2组接点与第四排接点的第2组接点串联构成所述表示电路的第二支路;
第三排接点的第1组接点设置在执行电源正极与锁闭电机的第一正极接点之间,并且与第二排接点的第1组接点并联设置;
第四排接点的第1组接点设置在执行电源正极与转辙电机的第二正极接点之间;
第五排接点设置在执行电源正极与锁闭电机的第二正极接点之间;
第六排接点的第1组接点的两个接点分别与第三开关的两个接点连接,且当第六排接点的第1组接点导通时,所述第三开关闭合,当第六排接点的第1组接点断开断开时,所述第三开关断开;
第六排接点的第2组接点的两个接点分别与第二开关的两个接点连接,且当第六排接点的第2组接点导通时,所述第二开关闭合,当第六排接点的第2组接点断开断开时,所述第二开关断开;
第七排接点的第1组接点悬置,第2组接点两个接点分别与第一开关的两个接点连接,且当第七排接点的第2组接点导通时,所述第一开关闭合,当第七排接点的第2组接点断开断开时,所述第一开关断开;
第八排接点设置在电源正极与锁闭电机的第一正极接点之间,且与第二排接点的第1组接点和第三排接点的第1组接点串联连接。
在本发明的一个实施例中,所述自动开闭器的动作逻辑为:
道岔锁闭完成时所述自动开闭器的第五排接点和第七排接点导通,第六排接点和第八排接点断开;
道岔解锁完成时所述自动开闭器的第五排接点和第七排接点断开,第六排接点和第八排接点导通;
道岔位于定位位置时所述自动开闭器的第一排接点和第三排接点导通,第二排接点和第四排接点断开;
道岔位于反位位置时所述自动开闭器的第一排接点和第三排接点断开,第二排接点和第四排接点导通;
道岔由定位位置转至反位位置的过程中,道岔开始转辙时所述自动开闭器的第三排接点打至第四排接点,道岔转辙完成时所述自动开闭器的第一排接点打至第二排接点;
道岔由反位位置转至定位位置的过程中,道岔开始转辙时所述自动开闭器的第一排接点打至第二排接点,道岔转辙完成时所述自动开闭器的第四排接点打至第三排接点;
道岔解锁过程中,道岔解锁开始时所述自动开闭器的第七排接点打至第八排接点,道岔解锁完成时所述自动开闭器的第五排接点打至第六排接点;
道岔锁闭过程中,道岔锁闭至一半时,所述自动开闭器的第六排接点打至第五排接点,道岔转辙完成时所述自动开闭器的第八排接点打至第七排接点。
在本发明的一个实施例中,还包括:
继电器组件,所述继电器组件包括多个继电器,多个所述继电器和至少一个所述开关构成所述转辙电路、锁闭电路或表示电路的启动电路,用于使所述转辙电路、锁闭电路或表示电路接通或断开。
在本发明的一个实施例中,还包括:
接口电路,用于与上级系统连接,以接收上级系统的指令或向上级及系统反馈道岔的位置。
在本发明的一个实施例中,所述转辙电路、锁闭电路或表示电路中电路元件设置在道岔控制柜、转辙电机箱或锁闭电机箱中。
在本发明的一个实施例中,还包括:
电缆盒,所述电缆盒包括多个电缆,所述道岔控制柜中的电路元件通过所述电缆与所述转辙电机箱中的电路元件连接。
本发明另一方面还提供一种道岔控制系统,其包括:
信号联锁系统,所述信号联锁系统用于下发道岔操作指令,并接收道岔位置表示信号;
道岔系统,所述道岔系统包括上述的道岔控制电路,用于控制转辙电机或锁闭电机,以完成道岔的转辙和锁闭。
在本发明的一个实施例中,所述道岔系统根据摆臂的转辙距离控制所述转辙电机的动作,以及根据锁闭机构的位置控制锁闭电机的动作,其中,所述摆臂的转辙距离和锁闭机构的位置通过所述道岔控制电路中的自动开闭器表示。
根据本发明的道岔控制电路及道岔控制系统,通过使用自动开闭器代替行程开关来表示道岔转辙位置和/或锁闭状态,并将自动开闭器的接点设置在转辙电路、锁闭电路和表示电路中,当自动开闭器的接点响应于道岔转辙位置和/或锁闭状态控制各排接点的导通时使转辙电路、锁闭电路和表示电路连通或断开,这样通过自动开闭器实现了各电路模块的交互,从而减少各模块电路的交互节点,使控制逻辑更清晰简单,并且使用自动开闭器代替行程开关,相对每个位置安装行程开关降低了成本,且自动开闭器无需室外安装,可直接安装在控制柜内,减少了安装量和安装难度。
附图说明
本发明的下列附图在此作为本发明的一部分用于理解本发明。附图中示出了本发明的实施例及其描述,用来解释本发明的原理。
附图中:
图1示出根据本发明一实施例的道岔控制系统的示意性框图;
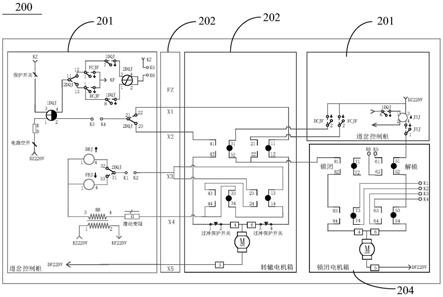
图2示出根据本发明一实施例的道岔控制电路的示意性电路图;
图3示出根据本发明一实施例的表示电路的示意性电路图;
图4示出根据本发明一实施例的转辙电路的示意性电路图;
图5示出根据本发明一实施例的锁闭电路的示意性电路图;
图6示出根据本发明一实施例的接口电路的示意性电路图;
图7示出根据本发明一实施例的道岔控制柜的继电器组合示意图;
图8示出根据本发明一实施例的道岔控制柜的操作面板示意图;
图9示出图2所示道岔控制电路当道岔在反位位置未锁闭时的电路示意图;
图10示出图2所示道岔控制电路当道岔在四开位置未锁闭时的电路示意图。
100道岔控制系统
101信号联锁系统
102道岔系统
103转辙电机
104锁闭电机
200道岔控制电路
201道岔控制柜
202电缆盒
203转辙机箱
204锁闭机箱
具体实施方式
为了使得本发明的目的、技术方案和优点更为明显,下面将参照附图详细描述根据本发明的示例实施例。显然,所描述的实施例仅仅是本发明的一部分实施例,而不是本发明的全部实施例,应理解,本发明不受这里描述的示例实施例的限制。基于本发明中描述的本发明实施例,本领域技术人员在没有付出创造性劳动的情况下所得到的所有其它实施例都应落入本发明的保护范围之内。
在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
应当理解的是,本发明能够以不同形式实施,而不应当解释为局限于这里提出的实施例。相反地,提供这些实施例将使公开彻底和完全,并且将本发明的范围完全地传递给本领域技术人员。
在此使用的术语的目的仅在于描述具体实施例并且不作为本发明的限制。在此使用时,单数形式的“一”、“一个”和“所述/该”也意图包括复数形式,除非上下文清楚指出另外的方式。还应明白术语“组成”和/或“包括”,当在该说明书中使用时,确定所述特征、整数、步骤、操作、元件和/或部件的存在,但不排除一个或更多其它的特征、整数、步骤、操作、元件、部件和/或组的存在或添加。在此使用时,术语“和/或”包括相关所列项目的任何及所有组合。
为了彻底理解本发明,将在下列的描述中提出详细的步骤以及详细的结构,以便阐释本发明提出的技术方案。本发明的较佳实施例详细描述如下,然而除了这些详细描述外,本发明还可以具有其他实施方式。
在介绍之前,解释一下有关术语在本文中的含义。
tyjf:同意复示继电器
dcjf:去定位操纵继电器
fcjf:去反位操纵继电器
qqj:现场请求继电器
ztj:状态继电器
tj:时间继电器(3秒)
dbj:定位表示继电器
fbj:反位表示继电器
1dqj:1启动继电器
2dqj:2启动继电器
jsj:解锁继电器
bb:变压器
ztj:状态表示继电器
dcj:定操纵继电器
fcj:反操纵继电器
jcj:道岔检查继电器
dca:定操纵按钮
fca:反操作按钮
图1示出根据本发明一实施例的道岔控制系统的示意性框图。
如图1所示,本实施例公开的道岔控制系统100包括信号联锁系统101、道岔系统102、转辙电机103和锁闭电机104。
信号联锁系统101用于向道岔系统101下发道岔操作指令,以使道岔系统执行相应的操作;并接收道岔系统102的道岔位置表示信号,以得知道岔的位置和锁闭状态。示例性地,信号联锁系统101可以包括多个计算机和输入输出单元,多个计算机构成的系统用于生成道岔操作指令,并接收道岔位置表示信号,输入输出单元用于将所述道岔操作指令下发至道岔系统,具体地可以道岔操作指令操作道岔系统中的继电器,从而使道岔系统与道岔操作指令对应的动作;以及接收道岔系统的道岔表示信号,并将道岔表示信号发送至计算机,计算机根据该道岔表示信号在显示界面显示相应的指示。
道岔系统102包括道岔控制电路以及相应的组件,用于根据信号联锁系统101的道岔操作指令控制转辙电机103完成道岔的转辙,以及控制锁闭电机104完成道岔锁闭,同时根据道岔位置生成道岔表示信号。
具体地,道岔系统102根据摆臂的转辙距离控制转辙电机103的动作,以及根据锁闭机构的位置控制锁闭电机104的动作。例如,当摆臂的转辙距离表示转辙完成时,道岔系统102停止驱动转辙电机103,而当锁闭机构的位置表示锁闭完成时,道岔系统102停止驱动锁闭电机104。
在本实施例中,道岔控制电路包括自动开闭器,所述摆臂的转辙距离和锁闭机构的位置通过所述道岔控制电路中的自动开闭器表示。即,在本实施例中,使用自动开闭器代替行程开关表示道岔的位置,从而利用可实现的机械结构逻辑使得自动开闭器与道岔转辙距离和锁闭机构的位置存在逻辑关系,从而控制自动开闭器动作,并且在道岔控制电路的锁闭电路中融入自动开闭器,实现道岔启动电路和锁闭电路直接交互,无需在室外道岔的每个位置安装行程开关。
作为一个操作示例,本实施的道岔控制系统100的动作过程为信号联锁系统101向道岔系统102下发操作指令,道岔系统102控制转辙电机103驱动,转辙电机103驱动摆臂转动从而进行道岔转辙,道岔系统102根据摆臂转辙的距离进行处理,例如当摆臂转辙的距离表示道岔转辙到位时道岔系统102控制转辙电机103停止驱动,接着道岔系统102控制锁闭电机104执行锁闭,锁闭电机102带动锁闭结构完成机械动作,锁闭机构进入指定位置完成机械锁闭。
根据本发明的道岔控制系统由于根据摆臂的转辙距离控制转辙电机的动作,以及根据锁闭机构的位置控制锁闭电机的动作,相对于使用行程开关和限位挡板的方式,避免了依靠机械碰撞的方式存在的对设备损坏较大,长期磨损后影响准确性的问题,并且由于可以安装在控制柜内,不容易受到外界因素的影响。进一步地,这种方式逻辑和电路设计相对简单,实际工程应用上线束减少,设备安装和维护难度降低,成本降低。此外,有利于实现轨道智能化、信息化和轻量化。
图2示出根据本发明一实施例的道岔控制电路的示意性电路图;图3示图2所示的道岔控制电路中的表示电路的示意性电路图;图4示出图2所示的道岔控制电路中的转辙电路的示意性电路图;图5示出图2所示的道岔控制电路中的锁闭电路的示意性电路图。图6示出根据本发明一实施例的接口电路的示意性电路图;图7示出根据本发明一实施例的道岔控制柜的继电器组合示意图;图8示出根据本发明一实施例的道岔控制柜的操作面板示意图。
下面结合图2至图8对根据发明实施的道岔控制电路进行说明。
如图2至图5所示,本实施例公开的道岔控制电路200为单开道岔五线控制电路,共采用7个重力型安全继电器,分别是去定位操纵继电器dcjf、去反位操纵继电器fcjf、一动启继电器ldqj、二动启继电器2dqj、道岔定位表示继电器dbj、道岔反位表示继电器fbj、道岔解锁继电器jsj,三个开关,第一开关包括接点k1和k2,第二开关包括接点k3和k4,第三开关包括接点k5和k6,一个自动开闭器,该自动开闭器(图2中黑色原点位置表示自动开闭器的接点)包括第一至第八排接点,每排接点包括两组接点,每组接点包括两个接点;一个保险丝rd,一个变压器bb,一个滑动变阻器,三个保护开关,这些电路元件设置在道岔控制柜201、转辙电机箱203和锁闭电机箱204中,道岔控制柜201中的电路元件通过电缆盒202中的电缆与转辙电机箱203中的电路元件连接,电缆线x1是反操纵控制信号线,x2是定操纵控制信号线,x3道岔位置表示信号线,x4是道岔位置表示回线,x5是控制回线。
其中,一启动继电器1dqj的励磁线圈、第7组和8第组接点,二启动继电器2dqj的励磁线圈、第1组和2第组接点(11、12、13,21、22、23)、去定位操纵继电器dcjf的第1组接点、去反位操纵继电器fcjf第1组接点、第二开关k3、k4,第三开关k5、k6,自动开闭器第一排接点的第1组接点(11、12)、第四排接点的第1组接点(41、42),以及第一过冲保护开关和第二过冲保护开关构成转辙电路,所述转辙电路用于控制转辙电机完成道岔定位去反位或反位去定位操作。道岔定位去反位操作指的是道岔从定位位置转辙至反位位置,道岔反位去定位操作指的是道岔从反位位置转辙至定位位置。转辙电路的具体连接关系为一启动继电器1dqj的励磁线圈的1、3接点分别连接执行电源正极dz220v和电源正极kz(例如为24v),2、4接点分别连接第二开关的接点k3,和二启动继电器2dqj的第1组接点中的11接点;二启动继电器2dqj的第1组接点中的12接点连接去反位操纵继电器fcjf第1组接点的第一接点和一启动继电器1dqj的第7组接点中的第1接点,二启动继电器2dqj的第1组接点中的13接点连接去定位操纵继电器dcjf第1组接点的第1接点和一启动继电器1dqj的第8组接点中的第1接点,去反位操纵继电器fcjf第1组接点的第2接点和去定位操纵继电器dcjf第1组接点的第2接点连接电源负极kz,一启动继电器1dqj的第7组接点中的第2接点和一启动继电器1dqj的第8组接点中的第2接点分别连接二启动继电器2dqj的励磁线圈的3、1接点,二启动继电器2dqj的励磁线圈的2、4接点与第三开关的k6接点连接,第三开关的k5接点连接电源正极kz。第二开关的接点k4与二启动继电器2dqj的第2组接点中的21接点连接,二启动继电器2dqj的第2组接点中的22、23接点分别通过电缆线x1和x2与自动开闭器第一排接点的第1组接点中的接点11、第四排接点的第1组接点中的接点41连接,自动开闭器第一排接点的第1组接点中的接点12和第四排接点的第1组接点中的接点42连接分别通过过冲保护开关(3、4)以及过冲保护开关(1、2)与转辙电机的第一正极接点6和第二正极接点5连接,转辙电机的负极接点与执行电源负极df220v连接。第二开关的接点k3和k4分别与自动开闭器第六排接点的第2组接点(63、64)连接,第三开关的接点k5和k6分别与自动开闭器第六排接点的第1组接点(61、62)连接。
一启动继电器1dqj的第6组接点,去定位操纵继电器dcjf的第2组接点,去反位操纵继电器fcjf第2组接点,解锁继电器jsj的励磁线圈和第1组接点,自动开闭器第五排接点和第八排接点,第二排接点的第一组接点(21、22)和第三排接点的第一组接点(31、32)构成锁闭电路,所述锁闭电路用于控制锁闭电机完成道岔解锁或锁闭,所述锁闭电路包括解锁支路和锁闭支路。所述解锁支路的连接关系为:一启动继电器1dqj的第6组接点的第1接点连接电源正极kz,第2接点连接解锁继电器jsj的励磁线圈的1接点,解锁继电器jsj的励磁线圈的2接点连接电源负极,构成解锁继电器jsj的励磁电路,解锁继电器jsj的励磁线圈的3接点与执行电源正极dz220v连接,4接点与通过jsj的第1组接点以及自动开闭器的第五排接点与锁闭电机的第二正极接点6连接。所述锁闭支路包括去定位操纵锁闭支路和去反位操纵锁闭支路,去定位操纵继电器dcjf的第2组接点和自动开闭器第三排接点的第一组接点(31、32)串联构成去定位操纵锁闭支路,去反位操纵继电器fcjf的第2组接点和自动开闭器第二排接点的第一组接点(21、22)串联构成去反位操纵锁闭支路,去定位操纵锁闭支路和去反位操纵锁闭支路并联,然后一端与执行电源正极dz220v连接,另一端通过自动开闭器第八排接点与锁闭电机的第一正极接点4连接,锁闭电机的负极接点5与执行电源负极df220v连接。
道岔定位表示继电器dbj、道岔反位表示继电器fbj、变压器bb、滑动变阻器、二启动继电器2dqj的第3组接点、自动开闭器的第一排接点的第2组接点(13、14)、第二排接点的第2组接点(23、24)、第三排接点的第2组接点(33、34)、第四排接点的第2组接点(43、44)、第一开关(k1、k2)构成表示电路,所述表示电路用于产生表示道岔位置的信号。所述表示电路的连接关系为:道岔定位表示继电器dbj的励磁线圈一端与变压器3接点连接,另一端与二启动继电器2dqj的第三组接点中的32接点连接,道岔反位表示继电器fbj的励磁线圈一端与变压器3接点连接,另一端与二启动继电器2dqj的第三组接点中的33接点连接,二启动继电器2dqj的第三组接点中的31接点连接与第一开关的k1接点连接,第一开关的k2接点通过电缆x3与自动开闭器接点连接,其中自动开闭器第一排和第三排接点的第二组接点串联,串联一端与电缆x3连接,另一端与电缆x4连接;第二排和第四排接点的第二组接点串联,串联一端与电缆x3连接,另一端与电缆x4连接,电缆x4通过滑动变阻器与电压器bb的4接点连接。变压器bb的1、2接点分别与电源正极kz220v和电源负极kf220v连接。
在上述的道岔控制电路中,去定位操纵继电器dcjf、去反位操纵继电器fcjf、一动启继电器ldqj、二动启继电器2dqj、第一至第三开关构成所述转辙电路、锁闭电路或表示电路的启动电路,用于使所述转辙电路、锁闭电路或表示电路接通或断开。
在上述的道岔控制电路中,所述开关与所述自动开闭器的部分接点连接,且响应于所述自动开闭器的该部分点的导通而导通。所述自动开闭器还与道岔连接并且响应于道岔转辙位置和/或锁闭状态控制各排接点的导通,从而使转辙电路、锁闭电路和表示电路连通或断开。
具体地,在本实施例中,通过使用自动开闭器代替行程开关表示道岔的位置,利用可实现的机械结构逻辑实现自动开闭器与道岔转辙距离和锁闭情况存在逻辑关系,以控制自动开闭器动作。
示例性地,在本实施例中,所述自动开闭器的动作逻辑为:
道岔锁闭完成时所述自动开闭器的第五排接点和第七排接点导通,第六排接点和第八排接点断开;
道岔解锁完成时所述自动开闭器的第五排接点和第七排接点断开,第六排接点和第八排接点导通;
道岔位于定位位置时所述自动开闭器的第一排接点和第三排接点导通,第二排接点和第四排接点断开;
道岔位于反位位置时所述自动开闭器的第一排接点和第三排接点断开,第二排接点和第四排接点导通;
道岔由定位位置转至反位位置的过程中,道岔开始转辙时所述自动开闭器的第三排接点打至第四排接点,道岔转辙完成时所述自动开闭器的第一排接点打至第二排接点,其中,自动开闭器的第三排接点打至第四排接点的意思是自动开闭器由第三排接点导通变为至第四排接点导通,下述类似表示含义相同;
道岔由反位位置转至定位位置的过程中,道岔开始转辙时所述自动开闭器的第一排接点打至第二排接点,道岔转辙完成时所述自动开闭器的第四排接点打至第三排接点,这里的开始转辙,指的是道岔滑块移动前,具备一个例如1秒的机械动作缓冲时间;
道岔解锁过程中,道岔解锁开始时所述自动开闭器的第七排接点打至第八排接点,道岔解锁完成时所述自动开闭器的第五排接点打至第六排接点;
道岔锁闭过程中,道岔锁闭至一半时,所述自动开闭器的第六排接点打至第五排接点,道岔转辙完成时所述自动开闭器的第八排接点打至第七排接点。
本实施例的道岔控制电路还包括接口电路,用于与上级系统(例如图1中的信号联锁系统)连接,以接收上级系统的指令或向上级及系统反馈道岔的位置。图6示出根据本发明一实施例的接口电路的示意性电路图。如图6所示,本实施例的接口电路包括多个继电器,各继电器之间的连接关系如图6所示,在此不再赘述。本实施例的道岔控制电路各继电器的作用可以参见图7所示,其中上部分继电器属于接口层,完成与上层系统的交互,下部分的继电器属于逻辑层,完成道岔控制电路的控制。
本实施例的道岔控制电路可以通过接口电路接收上层系统的指令,并根据上层指令进行相应的动作,也可以由现场操作人员操作控制面板进行控制。现场操作面板的示例参见图8所示。
本实施例的道岔控制电路的原理如下:
一,一启动继电器1dqj(常态1dqj↓)的作用:1dqj↑,作为前接点,是沟通转辙电路和锁闭电路导通的条件之一。在本文中↓表示继电器螺旋,↑表示继电器吸起,吸起时电路导通,落下时电路断开。其中,
(1)定位去反位操作
励磁时机:当集中控制(即上层系统控制)或现场控制下,进行去反位操纵动作。fcjf↑,沟通1dqj的励磁电路,1dqj的励磁电路的为kz—保护开关—1dqj3_4—2dqj11_12—fcjf11_12—kf。
励磁电路切断时机:当道岔完成解锁,自动开闭器第6排61_62接点接通,第三开关k5-k6接通,2dqj3_4线圈得电转极,1dqj励磁电路中的2dqj11_12接点断开,1dqj励磁电路失电。
自闭时机:当道岔完成解锁,自动开闭器第6排接点63_64接点接通,第二开关k3-k4导通,2dqj3_4线圈得电转极,2dqj接点21_22接通,沟通1dqj1_2线圈的自闭电路,1dqj1_2线圈的自闭电路为:dz220v—电源开关—1dqj1_2—k3_k4—2dqj21_22—fz_x1—自动开闭器11_12—过冲保护开关3_4—转辙电机m—fz_x5—df220v。
自闭电路切断时机:当道岔转辙至反位位置时,尚未锁闭。自动开闭器第1排打至第2排,自动开闭器11_12接点断开,1dqj1_2自闭电路失电落下,转辙电机失电停止动作。
(2)反位去定位
励磁时机:当集中或现场控制下,进行去定位操纵动作,dcjf↑,沟通1dqj的励磁电路,1dqj的励磁电路的为kz—保护开关—1dqj3_4—2dqj11_13—dcjf11_12—kf。
励磁电路切断时机:当道岔完成解锁,自动开闭器第6排61_62(k5-k6)接点接通,2dqj1_2线圈得电转极,1dqj励磁电路中的2dqj11_13接点断开,1dqj励磁电路失电。
自闭时机:当道岔完成解锁,自动开闭器第6排63_64(k3-k4)接点接通,2dqj1_2线圈得电转极,2dqj接点21_23接通。沟通1dqj1_2线圈的自闭电路(dz220v—电源开关—1dqj1_2—k3_k4—2dqj21_23—fz_x2—自动开闭器41_42—过冲保护开关1_2—转辙电机m—fz_x5—df220v)。
自闭电路切断时机:当道岔转辙至定位位置时,尚未锁闭。自动开闭器第4排打至第3排,自动开闭器41_42接点断开,1dqj1_2自闭电路失电落下,转辙电机失电停止动作。
二,二启动继电器2dqj的作用:2dqj有两极,通过转换转态,可实现道岔直流转辙机变相,以及切换表示电路继电器的励磁电路、切断1dqj的励磁电路。
转极时机:当集中或现场控制下,进行操纵动作,fcjf↑或dcjf↑。当道岔完成解锁后,自动开闭器第6排合上,接点61_62接通,第三开关k5-k6导通,2dqj转极。
fcjf↑,定位→反位转极:
kz—k5_k6—2dqj3_4—1dqj71_72—fcjf11_12—kf。
dcjf↑,反位→定位转极:
kz—k5_k6—2dqj1_2—1dqj81_82—dcjf11_12—kf。
三,解锁继电器jsj的作用:作为沟通锁闭电机解锁电路的重要条件。
励磁时机:当集中或现场控制下,实行操纵动作fcjf↑或dcjf↑,1dqj↑时,通过1dqj61_62接点沟通jsj1_2线圈的励磁电路,通jsj1_2线圈的励磁电路为:kz—1dqj61_62—kf。
沟通转辙电机电路时机:当jsj↑时,通过其jsj11_12前接点和自动开闭器第5排接点,沟通jsj43_4线圈及锁闭电机电路,kz—jsj43_4—jsj11_12—自动开闭器51_53—自动开闭器53_54—锁闭电机m—kf。
切断转辙电机电路时机:当道岔解锁完成,自动开闭器第5排打至第6排时,自动开闭器51_53/53_54接点断开,jsj43_4线圈失电,锁闭电机失电停止转动。
落下时机:当道岔完成一次转辙到位时,尚未锁闭。1dqj3_4自闭线圈失电落下,1dqj↓致使jsj1_2励磁线圈失电,jsj↓。
作为一个操纵示例,接下来以定位操纵至反位来描述本实施来的道岔控制电路200的操纵过程。其中“↑”表示吸起,“↓”表示落下。定位操纵至反位的过程为:
首先,通过调试人员或ats执行“道岔去反位”操纵,具体地,对于集中控制,过程为:jsj↑—dcj↑/fcj↓—ztj↓—fcjf↑,对于现场控制过程为:dca按下—ztj↑—fcjf↑。
接着,逻辑层动作:fcjf↑—1dqj3-4↑—jsj↑,沟通锁闭电机解锁电路。
接着,锁闭电机解锁,解锁完成。自动开闭器第6排(k3_k4/k5_k6)、第8排(锁闭电路)接点接通,第5排(解锁电路)、第7排(k1_k2—dbj↓)接点断开;
接着,因k5_k6接通、fcjf↑—1dqj3-4↑,所以2dqj3_4得电转极。
接着,k3_k4接通、2dqj转极,沟通定至反转辙电路,dz220v—电源开关—1dqj1_2—k3_k4—2dqj21_22—fz_x1—自动开闭器11_12—过冲保护开关3_4—转辙电机m—fz_x5—df220v。
接着,道岔转至反位位置,自动开闭器第4排(41_42)、第2排(21_22)沟通,第1排(11_12)、第3排(31_32)断开,转辙电机停止动作。
接着,因自动开闭器21_22沟通、fcjf↑,沟通锁闭电机的锁闭电路,锁闭电机进行锁闭动作。kz—fcjf21_22—自动开闭器21_22—自动开闭器81_82—自动开闭器83_84—锁闭电机m—kf。
接着,锁闭电机锁闭,锁闭完成。自动开闭器第6排(k3_k4/k5_k6)、第8排(锁闭电路)接点断开,第5排(解锁电路)、第7排(k1_k2—fbj↑)接点接通。
接着,道岔完成一次定位去反位工作后,因2dqj转极,自动开闭器k1_k2接通,所以fbj↑。bb3—fbj1_4—2dqj31_33—k1_k2—fz_x3—自动开闭器23_2—自动开闭器43_44—fz_x4—滑动变阻器—bb4。
最后,fbj↑—dbj↓—fbjf↑,信号联锁系统采集fbjf↑状态,给出人机界面反位表示。
根据本实施例的道岔控制电路,由于使用自动开闭器来沟通道岔位置与转辙电路、锁闭电路和表示电路,因而减少了各模块电路之间的交互节点,使控制逻辑更加清晰简单,并且由于操作动作严格按照逻辑定义执行,因此若出现故障,也无需上线上梁维修维护,结合维修文档可迅速确定问题点。下面结合图9和图10对本实施例的道岔控制电路的故障分析进行示例说明。
图9示出图2所示道岔控制电路当道岔在反位位置未锁闭时的电路示意图。
如图9所示,故障现象:道岔由定位位置向反位位置操纵,道岔正常解锁并转至反位位置时,锁闭电机没有执行锁闭动作。
失表分析:
道岔没有完成整个转辙动作,转辙超时fcjf↓,联锁规定时间内没有采集到道岔位置信息,给出道岔失表信息。
故障分析:
自动开闭器接点接触不良、锁闭电机烧坏、电路断路、电源失电等
紧急故障处理:
首先,重新给道岔下达反操命令,若fcjf↑,锁闭电机不动作。接点,再重新给道岔下达定位操纵命令,若dcjf↑—1dqj↑—2dqj转极—道岔定位转辙。
然后,若道岔由反位位置转辙至定位位置,并完成锁闭,给出定位表示信息,则说明锁闭电路中的反位锁闭电路故障(fcjf以及自动开闭器的第二排第一区接点21、22所在部分);若道岔由反位位置转辙至定位位置,未锁闭,则说明整个锁闭电路,定位反位锁闭公共部分电路故障,或定位反位各自锁闭电路故障。
图10示出图2所示道岔控制电路当道岔在四开位置未锁闭时的电路示意图。
如图10所示,故障现象:道岔由定位位置向反位位置操纵,道岔转至中途时,道岔停止动作。
失表分析:
道岔没有完成整个转辙动作,转辙超时fcjf↓,联锁规定时间内没有采集到道岔位置信息,给出道岔失表信息。
故障分析:
自动开闭器接点接触不良、转辙电机烧坏、电路断路、电源失电等。
紧急故障处理:
首先,给道岔下达定位操纵命令,将道岔转至原来位置,若dcjf↑—1dqj↑—2dqj转极—道岔定位转辙。
然后,若道岔由四开位置转辙至定位位置,并完成锁闭,给出定位表示信息,则说明整个转辙电路中的部分反位转辙电路故障(2dqj的22接点至过冲保护开关3、4接点部分);若道岔在四开位置不动作,则说明整个转辙中电路,定位反位转辙公共部分电路故障,或定位反位各自部分转辙电路故障。
根据本实施例的道岔控制电路具有如下优点:
一,从电路安全控制的角度,本方案减少了各模块电路之间的交互节点,使控制逻辑更加清晰简单,符合轻量化的设计原则。
二,从设备安装及成本角度,智能化的自动开闭器较每个位置安装行程开关的成本更低,并可直接安装在道岔控制机柜内,无需室外安装,减少安装量以及安装难度。
三,从运维及安全的角度,智能化设备严格按照逻辑定义执行,可使整个系统更加安全稳定;若出现故障,也无需上线上梁维修维护,结合维修文档可迅速确定问题点。
应当理解,为了精简本发明并帮助理解各个发明方面中的一个或多个,在对本发明的示例性实施例的描述中,本发明的各个特征有时被一起分组到单个实施例、图、或者对其的描述中。然而,并不应将该本发明的方法解释成反映如下意图:即所要求保护的本发明要求比在每个权利要求中所明确记载的特征更多的特征。更确切地说,如相应的权利要求书所反映的那样,其发明点在于可以用少于某个公开的单个实施例的所有特征的特征来解决相应的技术问题。因此,遵循具体实施方式的权利要求书由此明确地并入该具体实施方式,其中每个权利要求本身都作为本发明的单独实施例。
本领域的技术人员可以理解,除了特征之间相互排斥之外,可以采用任何组合对本说明书(包括伴随的权利要求、摘要和附图)中公开的所有特征以及如此公开的任何方法或者设备的所有过程或单元进行组合。除非另外明确陈述,本说明书(包括伴随的权利要求、摘要和附图)中公开的每个特征可以由提供相同、等同或相似目的替代特征来代替。
此外,本领域的技术人员能够理解,尽管在此所述的一些实施例包括其它实施例中所包括的某些特征而不是其它特征,但是不同实施例的特征的组合意味着处于本发明的范围之内并且形成不同的实施例。例如,在权利要求书中,所要求保护的实施例的任意之一都可以以任意的组合方式来使用。
以上所述,仅为本发明的具体实施方式或对具体实施方式的说明,本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。本发明的保护范围应以权利要求的保护范围为准。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

