1.本发明涉及机器人底盘,更具体的说是一种大范围跨越障碍机器人底盘。
背景技术:
2.现有技术中的一种机器人地盘,包括地盘ⅰ、地盘ⅱ、转向机构、补偿支架、摆动机构ⅰ、传动机构、摆动机构ⅱ、同步带、运动足和调紧机构,可以通过摆动机构ⅰ带动传动机构进行摆动,传动机构带动摆动机构ⅱ进行摆动,摆动机构ⅰ和摆动机构ⅱ的摆动速度相同,摆动机构ⅰ和摆动机构ⅱ的摆动方向相反,摆动机构ⅰ和摆动机构ⅱ带动对应的运动足进行摆动,四个运动足在摆动的过程中推动装置向前进行运动,八个补偿支架分别限制四个运动足在摆动的过程中在对应的摆动机构ⅰ和摆动机构ⅱ内进行滑动,保证地盘ⅰ和地盘ⅱ在前进过程中在一定程度上保持统一水平高度,转向机构可以中在一定程度上驱动装置进行转弯;现有技术的缺点是不能更好的越障。
技术实现要素:
3.本发明的目的是提供一种大范围跨越障碍机器人底盘,可以有效的越过障碍物。
4.本发明的目的通过以下技术方案来实现:
5.一种大范围跨越障碍机器人底盘,包括摆动支架、越障机构、插定机构、伸缩支架、驱动机构、底部支架、转动机构ⅰ、转动机构ⅱ和定位机构,摆动支架包括摆动侧板、螺纹筒、螺纹杆、滑动筒ⅰ、支撑柱和连接板,摆动侧板设置有两个,两个摆动侧板的上侧之间传动连接有螺纹杆,螺纹杆上设置有可以驱动其进行转动的动力装置ⅰ,动力装置ⅰ优选为伺服电机,螺纹杆两端的螺纹旋向相反,螺纹杆的两端均通过螺纹连接有螺纹筒,两个螺纹筒上均固定连接有连接板,两个连接板上均固定连接有滑动筒ⅰ,两个滑动筒ⅰ之间滑动连接有支撑柱,支撑柱和滑动筒ⅰ之间固定连接有压缩弹簧ⅰ,支撑柱上设置有可以驱动其进行转动的动力装置ⅱ,动力装置ⅱ优选为伺服电机;
6.越障机构包括越障盘、滑动筒ⅱ、滑动柱、插入块和圆弧板,越障盘的外侧固定连接有多个滑动筒ⅱ,多个滑动筒ⅱ中的一个上滑动连接有滑动柱,滑动柱和滑动筒ⅱ之间固定连接有压缩弹簧ⅱ,滑动柱上固定连接有插入块,滑动柱上固定连接有圆弧板,圆弧板的外侧设置有橡胶垫,支撑柱上滑动连接有多个越障盘,多个越障盘之间均固定连接有压缩弹簧ⅲ,位于两侧的越障盘和对应的滑动筒ⅰ之间均固定连接有压缩弹簧ⅲ,多个圆弧板相互错位设置;
7.插定机构包括伸缩机构ⅰ和定位插盘,伸缩机构ⅰ的伸缩端固定连接有定位插盘,两个摆动侧板上均转动连接有伸缩机构ⅰ,定位插盘间歇配合在滑动筒ⅰ上,两个定位插盘的内侧可插入对应的多个插入块内;
8.伸缩支架包括伸缩底板、伸缩侧板和横移电机ⅰ,伸缩底板的左右两侧均滑动连接有伸缩侧板,伸缩底板的左右两侧均固定连接有横移电机ⅰ,两个伸缩侧板分别通过螺纹连接在两个横移电机ⅰ的输出轴上,两个伸缩侧板上均固定连接有驱动机构,两个伸缩侧板上
均转动连接有摆动支架,驱动机构和摆动支架之间传动连接,驱动机构能够驱动摆动支架进行摆动;
9.底部支架上设置有转动机构ⅰ,伸缩底板固定连接在转动机构ⅰ上,底部支架的左右两侧均设置有转动机构ⅱ,两个转动机构ⅱ上均固定连接有定位机构;
10.定位机构包括伸缩机构ⅱ、定位支架、横移电机ⅱ、横移支架和伸缩机构ⅲ,伸缩机构ⅱ的伸缩端上固定连接有定位支架,两个定位支架上均固定连接有横移电机ⅱ,两个横移电机ⅱ的输出轴上均通过螺纹连接有横移支架,横移支架滑动连接在定位支架上,横移支架上固定连接有两个伸缩机构ⅲ。
11.本发明一种大范围跨越障碍机器人底盘的有益效果为:
12.本发明一种大范围跨越障碍机器人底盘,可以通过驱动机构驱动摆动支架进行摆动,摆动支架带动越障机构进行摆动,进而调整越障机构的位置,同时越障机构上设置有多个错位的圆弧板可以有效的进行越障,伸缩支架可以调整整个装置的长度,底部支架、转动机构ⅰ、转动机构ⅱ和定位机构之间相互配合运动,可以调整装置的转动方向,同时辅助越障。
附图说明
13.下面结合附图和具体实施方法对本发明做进一步详细的说明。
14.图1是本发明的摆动支架、越障机构和插定机构连接结构示意图;
15.图2是本发明的摆动支架结构示意图;
16.图3是本发明的支撑柱结构示意图;
17.图4是本发明的越障机构结构示意图一;
18.图5是本发明的越障机构结构示意图二;
19.图6是本发明的摆动支架和插定机构连接结构示意图;
20.图7是本发明的伸缩支架、驱动机构和摆动支架连接结构示意图;
21.图8是本发明的底部支架、转动机构ⅰ、转动机构ⅱ、定位机构和伸缩支架连接结构示意图;
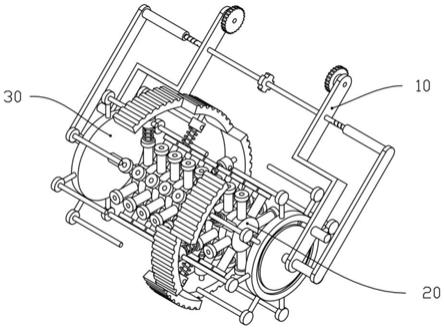
22.图9是本发明的大范围跨越障碍机器人底盘整体结构示意图一;
23.图10是本发明的大范围跨越障碍机器人底盘整体结构示意图二。
24.图中:摆动支架10;摆动侧板11;螺纹筒12;螺纹杆13;滑动筒ⅰ14;支撑柱15;连接板16;越障机构20;越障盘21;滑动筒ⅱ22;滑动柱23;插入块24;圆弧板25;插定机构30;伸缩机构ⅰ31;定位插盘32;伸缩支架40;伸缩底板41;伸缩侧板42;横移电机ⅰ43;驱动机构50;底部支架60;转动机构ⅰ70;转动机构ⅱ80;定位机构90;伸缩机构ⅱ91;定位支架92;横移电机ⅱ93;横移支架94;伸缩机构ⅲ95。
具体实施方式
25.下面结合附图对本发明作进一步详细说明。
26.下面结合图1至10说明本实施方式,一种大范围跨越障碍机器人底盘,包括摆动支架10、越障机构20、插定机构30、伸缩支架40、驱动机构50、底部支架60、转动机构ⅰ70、转动机构ⅱ80和定位机构90,摆动支架10包括摆动侧板11、螺纹筒12、螺纹杆13、滑动筒ⅰ14、支
撑柱15和连接板16,摆动侧板11设置有两个,两个摆动侧板11的上侧之间传动连接有螺纹杆13,螺纹杆13上设置有可以驱动其进行转动的动力装置ⅰ,动力装置ⅰ优选为伺服电机,螺纹杆13两端的螺纹旋向相反,螺纹杆13的两端均通过螺纹连接有螺纹筒12,两个螺纹筒12上均固定连接有连接板16,两个连接板16上均固定连接有滑动筒ⅰ14,两个滑动筒ⅰ14之间滑动连接有支撑柱15,支撑柱15和滑动筒ⅰ14之间固定连接有压缩弹簧ⅰ,支撑柱15上设置有可以驱动其进行转动的动力装置ⅱ,动力装置ⅱ优选为伺服电机;
27.越障机构20包括越障盘21、滑动筒ⅱ22、滑动柱23、插入块24和圆弧板25,越障盘21的外侧固定连接有多个滑动筒ⅱ22,多个滑动筒ⅱ22中的一个上滑动连接有滑动柱23,滑动柱23和滑动筒ⅱ22之间固定连接有压缩弹簧ⅱ,滑动柱23上固定连接有插入块24,滑动柱23上固定连接有圆弧板25,圆弧板25的外侧设置有橡胶垫,支撑柱15上滑动连接有多个越障盘21,多个越障盘21之间均固定连接有压缩弹簧ⅲ,位于两侧的越障盘21和对应的滑动筒ⅰ14之间均固定连接有压缩弹簧ⅲ,多个圆弧板25相互错位设置;
28.使用时启动支撑柱15上设置的动力装置ⅱ,动力装置ⅱ优选为伺服电机,动力装置ⅱ可以固定连接在一侧的滑动筒ⅰ14上,可以在支撑柱15上固定连接有宽齿轮,动力装置ⅱ的输出轴上固定连接有窄齿轮,窄齿轮和宽齿轮之间啮合传动,这样在支撑柱15进行滑动时,由于宽齿轮的齿宽大于窄齿轮齿宽,进而保证动力装置ⅱ的输出轴和支撑柱15之间处于啮合状态,本领域技术人员也可以根据不同的使用需求设置动力装置ⅱ的位置,只要保证其可以驱动支撑柱15进行转动即可,支撑柱15上固定连接有连接键,多个越障盘21是滑动连接在连接键上,进而使得支撑柱15在进行转动时可以通过连接键带动多个越障盘21进行转动,同时由于越障盘21是滑动连接在连接键上的,因此越障盘21只有周向的定位,没有轴向的定位,进而使得越障盘21可以在支撑柱15上进行转动,同时保证支撑柱15在进行转动时可以带动多个越障盘21进行转动;
29.启动动力装置ⅱ,动力装置ⅱ的输出轴带动支撑柱15进行转动,支撑柱15带动其上设置的多个越障盘21进行转动,多个越障盘21分别带动对应的滑动筒ⅱ22进行转动,滑动筒ⅱ22带动滑动柱23进行转动,滑动柱23带动插入块24进行转动,滑动柱23带动对应的圆弧板25进行转动,由于多个圆弧板25之间是错位设置的,多个圆弧板25的错位不仅仅限于图1中所示的状态,只要保证在一个圆周内均匀分布有多个圆弧板25即可,多个圆弧板25可以错位在不同的位置,进而保证多个圆弧板25在转动时始终有一个和地面接触,同时在遇到障碍物时,多个圆弧板25由于是错位设置的,多个圆弧板25不和障碍物接触,直接越过障碍物,进而越障存在障碍物的位置,进而保证装置在前进状态中的稳定性,保证装置不会由于和障碍物接触进而带动装置出现晃动等情况;
30.进一步的在圆弧板25的外侧设置有橡胶垫,进而保证圆弧板25运动过程中的抓地力,同时橡胶垫也起到一定的缓冲作用;
31.进一步的在滑动筒ⅱ22和滑动柱23之间固定连接有压缩弹簧ⅱ,进而进一步的增加装置的缓冲,进而起到减震的作用,进一步的减少装置在运动过程中的晃动;
32.进一步的为了根据不同的使用需求调整多个圆弧板25之间的相对距离,转动螺纹杆13,螺纹杆13上设置有可以驱动螺纹杆13进行转动的动力装置ⅰ,动力装置ⅰ优选为伺服电机,动力装置ⅰ可以固定连接在一侧的摆动侧板11,动力装置ⅰ的输出轴和螺纹杆13之间啮合传动,动力装置ⅰ的输出轴带动螺纹杆13进行转动,螺纹杆13通过螺纹带动两个螺纹筒
12进行运动,螺纹杆13两端的螺纹旋相反,螺纹杆13转动时通过螺纹带动两个螺纹筒12相互靠近或者远离,两个螺纹筒12分别带动对应的连接板16相互靠近或者远离,两个连接板16分别带动两个滑动筒ⅰ14相互靠近或者远离,两个滑动筒ⅰ14通过压缩弹簧ⅰ对支撑柱15进行挤压,进而保证支撑柱15处于两个滑动筒ⅰ14之间对中的位置,同时两个滑动筒ⅰ14通过压缩弹簧ⅲ对多个越障盘21进行挤压,使得多个越障盘21之间的距离变大或者变小,进而调整多个越障盘21之间的相对距离,进而调整多个圆弧板25之间的相对距离,进而满足不同的使用需求;
33.插定机构30包括伸缩机构ⅰ31和定位插盘32,伸缩机构ⅰ31的伸缩端转动连接有定位插盘32,定位插盘32间歇配合在滑动筒ⅰ14上,两个摆动侧板11上均固定连接有伸缩机构ⅰ31,两个定位插盘32的内侧可插入对应的多个插入块24内;
34.进一步的,为了装置可以适用于更多的使用需求设置有插定机构30,当支撑柱15不再进行转动时,调整好多个插入块24的位置,将多个圆弧板25抬起,使得所有的压缩弹簧ⅱ处于不再压缩的状态,如图6所示,伸缩机构ⅰ31的伸缩端上固定连接有限位凸起,限位凸起滑动连接在定位插盘32上设置的滑槽内,启动伸缩机构ⅰ31,伸缩机构ⅰ31可以是液压红或者电动推杆,伸缩机构ⅰ31的伸缩端带动定位插盘32进行运动,定位插盘32插入到插入块24内,进而对插入块24进行定位,使得滑动柱23无法在滑动筒ⅱ22内进行滑动,进而对压缩弹簧ⅱ进行硬性的固定,进而对多个圆弧板25进行硬性支撑,使得装置可以在压缩弹簧ⅱ可以压缩和步可以压缩的两种状态下进行切换,进而满足更多的使用需求;
35.伸缩支架40包括伸缩底板41、伸缩侧板42和横移电机ⅰ43,伸缩底板41的左右两侧均滑动连接有伸缩侧板42,伸缩底板41的左右两侧均固定连接有横移电机ⅰ43,两个伸缩侧板42分别通过螺纹连接在两个横移电机ⅰ43的输出轴上,两个伸缩侧板42上均固定连接有驱动机构50,两个伸缩侧板42上均转动连接有摆动支架10,驱动机构50和摆动支架10之间传动连接,驱动机构50能够驱动摆动支架10进行摆动;
36.进一步的,为了使得装置的长度可以进行调整,设置有伸缩支架40,当需要装置的长度进行调整时,启动横移电机ⅰ43,横移电机ⅰ43的输出轴开始转动,横移电机ⅰ43的输出轴通过螺纹带动伸缩侧板42进行运动,使得伸缩侧板42在伸缩底板41上进行滑动,进而调整伸缩侧板42的位置,同时伸缩侧板42带动摆动支架10进行运动,进而调整摆动支架10的位置,如图9所示,进而调整装置的整体长度;
37.进一步的设置有可以驱动摆动支架10进行摆动的驱动机构50,启动驱动机构50,驱动机构50的输出轴带动摆动支架10进行运动,进而使得摆动支架10可以进行摆动,进而调整摆动支架10的倾斜角度,通过调整摆动支架10的倾斜角度,可以调整装置的高度,如果两个摆动支架10的倾斜角度不同,还可以调整整个装置的倾斜状态;
38.底部支架60上设置有转动机构ⅰ70,伸缩底板41固定连接在转动机构ⅰ70上,底部支架60的左右两侧均设置有转动机构ⅱ80,两个转动机构ⅱ80上均固定连接有定位机构90;
39.定位机构90包括伸缩机构ⅱ91、定位支架92、横移电机ⅱ93、横移支架94和伸缩机构ⅲ95,伸缩机构ⅱ91的伸缩端上固定连接有定位支架92,两个定位支架92上均固定连接有横移电机ⅱ93,两个横移电机ⅱ93的输出轴上均通过螺纹连接有横移支架94,横移支架94滑动连接在定位支架92上,横移支架94上固定连接有两个伸缩机构ⅲ95。
40.进一步的,为了使得装置可以原地转圈,也方便其中一个摆动支架10可以抬起,方便插定机构30工作的同时,也增加装置的越障能力,进而设置有底部支架60、转动机构ⅰ70、转动机构ⅱ80和定位机构90,当需要其中一个摆动支架10抬起时,启动伸缩机构ⅱ91和伸缩机构ⅲ95,伸缩机构ⅱ91和伸缩机构ⅲ95可以是液压缸或者电动推杆,伸缩机构ⅱ91和伸缩机构ⅲ95的伸缩端向下进行运动,四个伸缩机构ⅲ95的伸缩端上均固定连接有支撑垫,四个支撑垫和地面接触,启动驱动机构50,驱动机构50的输出轴转动带动对应的摆动支架10进行转动,进而将摆动支架10台起来,进而增加装置的越障能力;
41.进一步的需要装置进行原地转向时,启动伸缩机构ⅱ91和伸缩机构ⅲ95,伸缩机构ⅱ91和伸缩机构ⅲ95可以是液压缸或者电动推杆,伸缩机构ⅱ91和伸缩机构ⅲ95的伸缩端向下进行运动,四个伸缩机构ⅲ95的伸缩端上均固定连接有支撑垫,四个支撑垫和地面接触,四个支撑垫将装置整个抬起,启动转动机构ⅰ70,转动机构ⅰ70转动带动整个伸缩支架40发生转动,进而完成装置的原地转向;
42.进一步的对定位机构90进一步的结构细化,进而使得定位机构90可以在不同的位置上对装置进行支撑,启动转动机构ⅱ80,可以调整定位机构90的支撑角度,启动横移电机ⅱ93,横移电机ⅱ93的输出轴通过螺纹带动横移支架94进行运动,进而调整四个伸缩机构ⅲ95支撑位置,进而满足更多的使用需求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

