1.本发明涉及机器人领域,尤其涉及一种多功能模块化越野履带机器人。
背景技术:
2.现如今机器人的种类越来越多,覆盖功能也越来越丰富,但是,基本上机器人只是具备单一的功能,只能满足单一的一种作业要求。例如,现有的消防机器人仅只有消防灭火,洗消功能,仅适用于消防灭火,洗消功能,不能进行其它作业;现有的履带装卸机器人只能进行叉装搬运作业,不能进行其它作业;现有的全地形履带车只能进行通过外接相关属具进行特定作业,但其功率小,体积小,作业半径不大。
3.为了应对当下越来越复杂的工作环境,在一些场景中可能需要多种机器人交相使用才能完成,例如在一些巡逻、消防、救援等复杂场景,同时需要巡逻机器人,消防炮车机器人,运输机器人,叉装搬运机器人,清障铲机器人中的一种或者多种。在这种情况下,多种机器人的使用一方面加大了物力成本,另一方面多种机器人的使用中除主要功能不能替代,其余的功能均可以使用相同的装置实现。
4.综上所述,现如今的机器人种类多,功能单一,在一些复杂工作中,需要多个机器人交替使用,成本大;如何能实现机器人的场地适应性、操作设备模块化、可拆卸性及多用途性,是当前机器人领域需要解决的问题。
技术实现要素:
5.为实现上述目的,本发明是提供一种多功能模块化越野履带机器人,结构简单、适用性强、用途广、成本低。
6.本发明解决上述技术问题的技术方案如下:多功能模块化越野履带机器人,包括:
7.履带式动力单元和载重平台;
8.履带式动力单元有两个且分别位于载重平台的两端,载重平台两端分别通过伸缩支腿连接两个履带式动力单元,履带式动力单元的上端表面安装有太阳能电池板,履带式动力单元的前端安装有摄像头、照明灯和示宽灯。
9.本发明的有益效果是:通过载重平台可以搭载适用于不同场景的上装装置,载重平台上伸缩支腿的可伸缩性,保证了上装装置即使大小不一,也可进行调整契合,摄像头为机器人提供了视频传输,照明灯和示宽灯为机器人提供了清晰照明,太阳能电池板可利用太阳储存电能;整个设备结构简单、适用性强、用途广、造价低。
10.在上述技术方案的基础上,本发明还可以做如下改进:
11.还包括动力提供装置,动力提供装置位于履带式动力单元内部并与履带式动力单元连接,动力提供装置包括锂电池模块、内燃机模块或者发电机模块中的一种或几种的组合。
12.采用上述进一步方案的有益效果是:通过动力提供装置提供动力进而驱动履带式动力单元运动保证了机器人底座的移动,动力提供装置可多种组合,根据不同场景使用,在
城市或取电方便地方使用,可采取锂电池提供动力,野外或无电情况可采用内燃机提供动力,也可搭载发电机模块,在提供动力的同时能为其他用电设备发电。
13.进一步,履带式动力单元包括驱动机构、机架、若干承重轮、罩壳、张紧轮、履带和驱动轮;驱动轮安装于机架的前端中部,张紧轮位于机架的后端中部,各承重轮位于驱动轮和张紧轮之间,履带围绕驱动轮、各承重轮和张紧轮设置,动力提供装置连接驱动机构,驱动轮连接驱动机构的动力输出端,罩壳连接在机架上,并覆盖在履带的侧面。
14.采用上述进一步方案的有益效果是:履带式动力单元为履带样式,可以保证机器人运动的场地适用性更广,复杂地形也可使用,动力提供装置可进行模块化替换,如发电机,锂电池或者内燃机等等,罩壳起整体履带式动力单元的保护作用。
15.进一步,载重平台包括连接板,伸缩支腿中间固定连接在连接板的底部,伸缩支腿的两端连接两个履带式动力单元,伸缩支腿的末端可伸缩。
16.采用上述进一步方案的有益效果是:载重平台位于履带式动力单元之间,通过伸缩支腿调整两个履带式动力单元的距离,进而扩大/缩小载重平台的大小,以搭载不同的上装装置以满足不同场景的工作需求。
17.进一步,还包括控制器,控制器连接控制履带式动力单元、太阳能电池板、摄像头、照明灯和示宽灯。
18.采用上述进一步方案的有益效果是:控制器能保证机器人底座的基础功能的实现,包括灯光,视频,光能收集以及设备运动。
19.进一步,履带式动力单元还包括供遥控器遥控的发射端和接收端。
20.用上述进一步方案的有益效果是:操作员可选择采取用遥控器遥控设备,并通过摄像头,可进行视频传输,影像显示在遥控设备上,方便操作员的远程控制。
21.进一步,还包括消防炮,消防炮安装在载重平台上并位于载重平台的前端。
22.用上述进一步方案的有益效果是:消防炮安装在载重平台上可以组成消防炮车机器人,可以进行消防作业。
23.进一步,还包括可折叠叉装搬运架,可折叠叉装搬运架安装在载重平台上并位于载重平台的前端。
24.用上述进一步方案的有益效果是:可以组成叉装搬运机器人,进行叉装搬运作业。
25.进一步,还包括清障铲,清障铲安装在载重平台上并位于载重平台的前端。
26.用上述进一步方案的有益效果是:可以组成清障机器人,进行路面清障机器人。
27.进一步,还包括座椅,座椅安装在载重平台上并位于载重平台的前端。
28.用上述进一步方案的有益效果是:可以组成带人巡逻机器人,进行带人巡逻作业。
附图说明
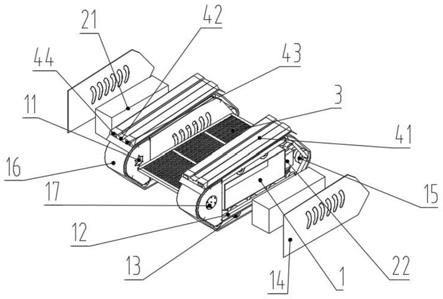
29.图1为本发明整体示意图;
30.图2为本发明载重平台示意图;
31.图3为本发明中带消防炮模块样式图;
32.图4为本发明中带可折叠叉装搬运架样式图;
33.图5为本发明中带清障铲样式图;
34.图6为本发明中带座椅巡逻模式图。
35.附图中,各标号所代表的部件列表如下:
36.1、履带式动力单元;11、驱动机构;12、机架;13、若干承重轮;14、罩壳;15、张紧轮;16、履带;17、驱动轮;21、动力提供装置;22、控制器;3、载重平台;31、连接板;32、伸缩支腿;41、太阳能电池板;42、摄像头;43、照明灯;44、示宽灯;5、消防炮;6、可折叠叉装搬运架;7、清障铲;8、座椅。
具体实施方式
37.为了使发明的目的、技术方案及优点更加清楚明白,以下结合附图,对本发明进行进一步详细说明,并非用于限定本发明的范围。
38.实施例1:如图1
‑
2所示,本发明公开的一种多功能模块化越野履带机器人的实施例,包括:
39.履带式动力单元1和载重平台3;
40.所述履带式动力单元1有两个且分别位于所述载重平台3的两端,所述载重平台3两端分别通过伸缩支腿32连接两个所述履带式动力单元1,所述履带式动力单元1的上端表面安装有太阳能电池板41,所述履带式动力单元1的前端安装有摄像头42、照明灯43和示宽灯44。
41.具体的,载重平台3两端分别通过伸缩支腿32连接两个所述履带式动力单元1,进而控制两个履带式动力单元1之间的距离,履带式动力单元1的上端表面安装有太阳能电池板41,前端安装有摄像头42、照明灯43和示宽灯44。
42.应理解的,通过载重平台3可以搭载适用于不同场景的上装装置,载重平台3上伸缩支腿32的可伸缩性,保证了上装装置即使大小不一,也可进行调整契合;摄像头42为机器人提供了视频传输,照明灯43和示宽灯44为机器人提供了清晰照明,太阳能电池板41可利用太阳储存电能;整个设备结构简单、适用性强、用途广、造价低。
43.优选的,上装装置可以为多种不同设备应用的模块化替换,如消防炮、可折叠叉装搬运架、清障铲、座椅等等。
44.在实施例1的基础上,实施例2:如图1
‑
2所示,还包括动力提供装置21,所述动力提供装置21位于所述履带式动力单元1内部并与所述履带式动力单元1连接,所述动力提供装置21包括锂电池模块、内燃机模块或者发电机模块中的一种或几种的组合。
45.具体的,动力提供装置21位于履带式动力单元1内部,动力提供装置21也可为模块化替换,如锂电池,内燃机和发电机等等。
46.应理解的,通过动力提供装置21提供动力进而驱动履带式动力单元1运动保证了机器人底座的移动,动力提供装置21可多种组合,根据不同场景使用,在城市或取电方便地方使用,可采取锂电池提供动力,野外或无电情况可采用内燃机提供动力,也可搭载发电机模块,在提供动力的同时能为其他用电设备发电。
47.在实施例2的基础上,实施例3:如图1
‑
2所示,所述履带式动力单元1包括驱动机构11、机架12、若干承重轮13、罩壳14、张紧轮15、履带16和驱动轮17;所述驱动轮17安装于所述机架12的前端中部,所述张紧轮15位于所述机架12的后端中部,各所述承重轮13位于所述驱动轮17和所述张紧轮15之间,所述履带16围绕所述驱动轮17、各所述承重轮13和所述张紧轮15设置,所述动力提供装置21连接所述驱动机构11,所述驱动轮17连接所述驱动机
构11的动力输出端,所述罩壳14连接在所述机架12上,并覆盖在所述履带16的侧面。
48.具体的,张紧轮15、承重轮13、驱动轮17均位于机架12上,驱动轮17安装于底部,张紧轮15位于末端,承重轮13位于驱动轮17和张紧轮15之间,当动力提供装置21为锂电池或者发电机时,动力提供装置21通过电线连接驱动机构11,驱动机构11为电动机,并通过齿轮减速箱连接驱动轮17;当动力提供装置21为内燃机时,通过齿轮减速箱连接驱动机构11,驱动机构11即为传动轴,再通过齿轮减速箱连接驱动轮17。
49.应理解的,通过动力提供装置21来提供动力,进而推进驱动机构11转动,再带动驱动轮17转动,进而推进履带16运动,使得两个履带式动力单元1进行移动。
50.在实施例1的基础上,实施例4:如图1
‑
2所示,所述载重平台3包括连接板31,所述伸缩支腿32中间固定连接在连接板31的底部,所述伸缩支腿32的两端连接两个所述履带式动力单元1,所述伸缩支腿32的末端可伸缩。
51.具体的,伸缩支腿32有两根,平行分布,前后两端分别连接一个履带式动力单元1,伸缩支腿32可伸缩,载重平台3可随伸缩支腿32的伸缩而变的宽窄。
52.应理解的,载重平台3的宽窄可变,可以搭载不同的上装装置以满足不同场景的工作需求。
53.优选的,伸缩支腿32由液压油缸组成或电动推杆组成,进行伸缩。
54.在实施例1的基础上,实施例5:如图1
‑
2所示,还包括控制器,所述控制器22连接控制履带式动力单元1、所述太阳能电池板41、所述摄像头42、所述照明灯43和所述示宽灯44。
55.具体的,控制器22能保证机器人底座的基础功能的实现,包括灯光,视频,光能收集以及设备运动。
56.在实施例1的基础上,实施例6:如图1
‑
2所示,所述履带式动力单元1还包括供遥控器遥控的发射端和接收端。
57.应理解的,遥控器遥控的发射端和接收端可以保证操作员采取用遥控器遥控设备,并通过摄像头,可进行视频传输,影像显示在遥控设备上,方便操作员的远程控制。
58.在实施例1的基础上,实施例7:如图3所示,还包括消防炮5,所述消防炮5安装在所述载重平台3上并位于载重平台的前端。
59.应理解的,消防炮安装在载重平台上可以组成消防炮车机器人,可以进行消防作业。
60.在实施例1的基础上,实施例8:如图4所示,还包括可折叠叉装搬运架6,所述可折叠叉装搬运架6安装在所述载重平台3上并位于载重平台的前端。
61.应理解的,叉装搬运机器人可以进行叉装搬运作业。
62.在实施例1的基础上,实施例9:如图5所示,还包括清障铲7,所述清障铲7安装在所述载重平台3上并位于载重平台的前端。
63.应理解的,清障机器人可以进行路面清障机器人。
64.在实施例1的基础上,实施例10:如图6所示,还包括座椅8,所述座椅8安装在所述载重平台3上并位于载重平台的前端。
65.应理解的,带人巡逻机器人可以进行带人巡逻作业。
66.优选的,载重平台3上还可以搭载运输箱等等其他上装装置。
67.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和
原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

