1.本发明涉及一种光学元件驱动机构。更具体地来说,本发明尤其涉及一种驱动光学元件运动的光学元件驱动机构。
背景技术:
2.随着科技的发展,现今许多电子装置(例如平板电脑或智能手机)都配有镜头模块而具有照相或录影的功能。这些电子装置的使用越来越普遍,并朝着便利和轻薄化的设计方向进行发展,以提供使用者更多的选择。
3.然而,前述镜头模块在组装时可能会因为组装失误或公差而产生缝隙,使得异物得以入侵,进而造成镜头或其他内部元件的磨损,亦可能导致镜头驱动模块无法使用。因此,如何解决前述问题始成一重要的课题。
技术实现要素:
4.为了解决上述公知的问题点,本发明提供一种光学元件驱动机构,用以连接一光学元件。前述光学元件驱动机构包括一固定部和一第一接着元件。固定部包括一第一元件和一第二元件,其中第一元件经由第一接着元件固定地连接第二元件。
5.本发明一些实施例中,前述光学元件驱动机构还包括一活动部和一驱动组件。活动部用以连接光学元件,且驱动组件用以驱动活动部相对于固定部运动。
6.本发明一些实施例中,前述光学元件驱动机构还包括一第二接着元件,且第一元件经由第二接着元件固定地连接第二元件。第一接着元件固化后的杨氏模数相异于第二接着元件固化后的杨氏模数。第一接着元件固化后的杨氏模数大于第二接着元件固化后的杨氏模数。第一接着元件直接接触第二接着元件。第一元件包括一顶壁和一侧壁,顶壁具有板状结构且垂直于一主轴,侧壁具有板状结构且由顶壁的边缘延伸,且侧壁的延伸方向不垂直于主轴。光学元件驱动机构还包括一第一间隙,形成于第一元件和第二元件之间,用以容纳第一接着元件。沿着主轴方向观察时,第一间隙围绕第二元件。沿着主轴方向观察时,第一间隙连续且不间断地围绕第二元件。光学元件驱动机构还包括一第二间隙,用以容纳第二接着元件。第二间隙形成于第一元件和第二元件之间。由光学元件驱动机构的外部观察时,第一间隙未显露。由光学元件驱动机构的外部观察时,第一接着元件未显露。由光学元件驱动机构的外部观察时,第二间隙的至少部分显露。由光学元件驱动机构的外部观察时,第二接着元件的至少部分显露。第一元件和第二元件在第一间隙中的最短距离相异于第一元件和第二元件在第二间隙中的最短距离。第一元件和第二元件在第一间隙中的最短距离小于第一元件和第二元件在第二间隙中的最短距离。第一间隙与第二间隙相连。第一元件和第二元件形成一容纳空间,用以容纳活动部。第一间隙与容纳空间之间的最短距离相异于第二间隙与该容纳空间之间的最短距离。第一间隙与容纳空间之间的最短距离小于第二间隙与容纳空间之间的最短距离。第一接着元件未固化时的粘度相异于第二接着元件未固化时的粘度。第一接着元件未固化时的粘度小于第二接着元件未固化时的粘度。
7.本发明一些实施例中,前述光学元件驱动机构还包括一第一弹性元件、一第三接着元件、一第四接着元件、一第二弹性元件、一第五接着元件、一第六接着元件以及一第三元件。活动部经由第一弹性元件活动地连接固定部。第一弹性元件经由第三接着元件连接固定部。第一弹性元件经由第四接着元件连接活动部。活动部经由第二弹性元件活动地连接固定部。第二弹性元件经由第五接着元件连接固定部。第二弹性元件经由第六接着元件连接活动部。第三元件固定地设置于第一元件上。第三接着元件固化后的杨氏模数相异于第一接着元件固化后的杨氏模数。第三接着元件固化后的杨氏模数小于第一接着元件固化后的杨氏模数。第三接着元件固化后的杨氏模数相同于第二接着元件固化后的杨氏模数。第四接着元件固化后的杨氏模数相同于第三接着元件固化后的杨氏模数。第五接着元件固化后的杨氏模数相异于第三接着元件及/或第四接着元件固化后的杨氏模数。第五接着元件固化后的杨氏模数大于第三接着元件及/或第四接着元件固化后的杨氏模数。第六接着元件固化后的杨氏模数相异于第五接着元件固化后的杨氏模数。第六接着元件固化后的杨氏模数小于第五接着元件固化后的杨氏模数。第一弹性元件经由第三接着元件连接第二元件。第一弹性元件具有板状结构。第一弹性元件垂直于主轴。第一弹性元件的材料相异于第二元件的材料。第一弹性元件具有金属材质。第二元件具有塑胶材质。第二弹性元件经由第五接着元件连接第一元件。第二弹性元件具有板状结构。第二弹性元件具有金属材质。第一元件具有金属材质。第三接着元件可产生形变,以分散过度的应力。第四接着元件可产生形变,以分散过度的应力。第六接着元件可产生形变,以分散过度的应力。驱动组件的至少部分经由第五接着元件连接固定部。驱动组件的一磁性元件经由第五接着元件连接固定部。磁性元件具有金属材质。沿着垂直主轴的方向观察时,第三元件的至少部分位于磁性元件和第一元件之间。沿着主轴方向观察时,第三元件和磁性元件重叠,且第三元件和第一元件重叠。第三元件的材料相异于第一元件的材料。第三元件具有塑胶材质。第三元件经由第五接着元件固定地连接第一元件。第二弹性元件经由第五接着元件连接第三元件。第五接着元件直接接触第一元件。第五接着元件直接接触第三元件。第五接着元件直接接触磁性元件。第五接着元件直接接触第二弹性元件。
8.本发明一些实施例中,前述第一弹性元件还包括一第一固定部连接段、一第一活动部连接段以及一第一弹性变形段。第一固定部连接段经由第三接着元件固定地连接固定部。第一活动部连接段经由第四接着元件固定地连接活动部。第一活动部连接段经由第一弹性变性段活动地连接第一固定部连接段,其中第一固定部连接段经由第三接着元件固定地连接第二元件,且第一弹性变形段可产生形变以分散过度的应力。前述第二弹性元件还包括一第二固定部连接段、一第二活动部连接段以及一第二弹性变形段。第二固定部连接段经由第五接着元件固定地连接固定部。第二活动部连接段经由第六接着元件固定地连接活动部。第二活动部连接段经由第二弹性变形段活动地连接第二固定部连接段,其中第二弹性变形段可产生形变以分散过度的应力。
9.本发明一些实施例中,前述第一接着元件以加热方式进行固化。第二接着元件以照光方式进行固化。第三接着元件以照光方式进行固化。第四接着元件以照光方式进行固化。第五接着元件以加热方式进行固化。第六接着元件以照光方式进行固化。第一接着元件具有树脂材质。第二接着元件具有树脂材质。第三接着元件具有树脂材质。第四接着元件具有树脂材质。第五接着元件具有树脂材质。第六接着元件具有树脂材质。
10.本发明一些实施例中,前述光学元件驱动机构还包括一第七接着元件,用以电性连接驱动组件。第七接着元件固化后包括一导电区段和一接着区段。接着区段具有树脂材质。导电区段具有金属材质。接着区段的电阻率大于导电区段的电阻率。导电区段的电导率相异于第五接着元件固化后的电导率。导电区段的电导率大于第五接着元件固化后的电导率。接着区段的杨氏模数相异于第三接着元件固化后的杨氏模数。接着区段的杨氏模数大于第三接着元件固化后的杨氏模数。接着区段的杨氏模数相异于第五接着元件固化后的杨氏模数。接着区段的杨氏模数小于第五接着元件固化后的杨氏模数。活动部经由第七接着元件连接第一弹性元件。第一弹性元件经由第七接着元件连接驱动组件的一驱动线圈。第七接着元件以加热方式进行固化。
11.本发明一些实施例中,前述光学元件驱动机构还包括一第八接着元件,用以电性连接驱动组件。第八接着元件具有金属材质。第八接着元件固化后的电导率相异于第三接着元件固化后的电导率。第八接着元件固化后的电导率大于第三接着元件固化后的电导率。第八接着元件固化后的电导率相异于第五接着元件固化后的电导率。第八接着元件固化后的电导率大于第五接着元件固化后的电导率。第八接着元件固化后的杨氏模数相异于第五接着元件固化后的杨氏模数。第八接着元件固化后的杨氏模数大于第五接着元件固化后的杨氏模数。第一弹性元件经由第八接着元件连接第二元件。第八接着元件的熔点高于第七接着元件的固化温度。
12.本发明一些实施例中,前述光学元件驱动机构还包括一第九接着元件,且第九接着元件包括一阻尼元件。第九接着元件直接接触活动部、固定部、第一弹性元件以及第二弹性元件的至少一者。第九接着元件固化后的杨氏模数相异于第四接着元件固化后的杨氏模数。第九接着元件固化后的杨氏模数小于第四接着元件固化后的杨氏模数。第九接着元件直接接触活动部、固定部以及第一弹性元件的至少一者。第九接着元件直接接触活动部和固定部的至少一者。
13.本发明一些实施例中,前述第一元件还包括一第一渐缩结构。第一渐缩结构对应于第一间隙,且具有一第一表面,第一表面面朝第一间隙。第一渐缩结构还具有一第二表面,第一表面不垂直于第二表面,且第一表面和第二表面面朝相异方向。第一表面和第二表面不平行。第一表面平行于主轴。第二表面和主轴不平行。第一渐缩结构对应于第二间隙。第一表面面朝第二间隙。第一表面具有平面结构。沿着垂直第一表面的方向观察时,第一表面与第一间隙重叠,且第一表面与第二间隙重叠。第一接着元件直接接触第一表面。第二接着元件直接接触第二表面。第二元件包括一第二渐缩结构,对应第一间隙。第二渐缩结构具有一第三表面,面朝第一间隙。第二渐缩结构具有一第四表面,第三表面不垂直于第四表面,且第三表面和第四表面面朝相异方向。第三表面和第四表面不平行。第三表面平行于主轴。第三表面和第一表面面朝相反方向。第四表面和主轴不平行。第一接着元件直接接触第三表面。第二接着元件直接接触第三表面。第二渐缩结构对应第二间隙。第三表面面朝第二间隙。沿着垂直第三表面的方向观察时,第三表面与第一间隙重叠,且第三表面与第二间隙重叠。第九接着元件直接接触第二渐缩结构。第九接着元件直接接触第四表面。沿着垂直主轴的方向观察时,第一渐缩结构的渐缩方向相异于第二渐缩结构的渐缩方向。沿着垂直主轴的方向观察时,第一渐缩结构的渐缩方向相反于第二渐缩结构的渐缩方向。沿着垂直第一表面的方向观察时,第一渐缩结构和第二渐缩结构重叠。第三接着元件直接接触固定部
的一第一接着表面。第三接着元件直接接触第一弹性元件的一第二接着表面,且第一接着表面和第二接着表面面朝相同方向。
附图说明
14.图1为根据本公开一实施例的光学元件驱动机构的立体图。
15.图2为根据本公开一实施例的光学元件驱动机构的爆炸图。
16.图3为根据本公开一实施例的光学元件驱动机构沿图1中1
‑
a
‑1‑
a线段的剖视图。
17.图4为根据本公开一实施例的第二驱动组件与基座的俯视图。
18.图5为根据本公开一实施例的镜头承载件与底座的俯视图。
19.图6为根据本公开一实施例的图5的右下角区域的立体放大图。
20.图7为根据本公开一实施例的镜头承载件、第一驱动线圈与第二驱动线圈的俯视图。
21.图8为根据本公开一实施例的镜头承载件与第一驱动线圈的放大图。
22.图9为根据本公开一实施例的镜头承载件与第一驱动线圈的侧视图。
23.图10为根据本公开一实施例的镜头承载件的立体放大图。
24.图11为根据本公开一实施例的镜头承载件于另一视角的立体放大图。
25.图12为根据另一实施例的镜头承载件与第一驱动线圈的立体放大图。
26.图13为根据另一实施例的镜头承载件与第一驱动线圈的侧视图。
27.图14为根据本公开一实施例的光学元件驱动机构的立体图。
28.图15为根据本公开一实施例的光学元件驱动机构的爆炸图。
29.图16为根据本公开一实施例的光学元件驱动机构沿图14中2
‑
a
‑2‑
a线段的剖视图。
30.图17为根据本公开一实施例的第二驱动组件与基座的俯视图。
31.图18为根据本公开一实施例的光学元件驱动机构的部分结构的俯视图
32.图19为根据本公开一实施例的框架与底座的立体图。
33.图20为根据本公开一实施例的框架与底座的放大图。
34.图21为根据本公开一实施例的框架与底座的俯视图。
35.图22为根据本公开一实施例的框架与底座的部分结构的侧视图。
36.图23为根据本公开一实施例的第一弹性元件与框架的俯视图。
37.图24为根据本公开一实施例的图23中区域2
‑
x的放大图。
38.图25根据本公开一实施例的沿着图24中线段2
‑
b
‑2‑
b的剖面图。
39.图26为根据本公开一实施例的第一弹性元件以及第二弹性元件的俯视图。
40.图27为根据本公开另一实施例的镜头承载件、第一弹性元件以及第一驱动线圈的立体放大图。
41.图28为根据本公开一实施例的光学元件驱动机构的立体图。
42.图29为根据本公开一实施例的光学元件驱动机构的爆炸图。
43.图30为根据本公开一实施例的光学元件驱动机构沿图28中3
‑
a
‑3‑
a线段的剖视图。
44.图31为根据本公开一实施例的第二驱动组件与基座的俯视图。
45.图32为根据本公开一实施例的第二驱动组件与基座的立体图。
46.图33为根据本公开一实施例的光学元件驱动机构的部分结构的立体图。
47.图34为根据本公开一实施例的图30的放大图。
48.图35为根据本公开另一实施例的固定件沿着x轴观察的部分结构的侧视图。
49.图36为根据本公开另一实施例的光学元件驱动机构部分结构的剖面图。
50.图37为根据本公开另一实施例的外壳于另一视角的的立体图。
51.图38为根据本公开另一实施例的外壳、固定件与基座的立体剖面图。
52.图39为根据本公开另一实施例的外壳、固定件与基座的沿着y轴观察时的剖面图。
53.图40为根据本公开一实施例的电路组件与固定件的俯视图。
54.图41为根据本公开一实施例的电路组件与固定件的主视图。
55.图42为根据本公开一实施例的光学元件驱动机构的立体图。
56.图43为根据本公开一实施例的光学元件驱动机构的爆炸图。
57.图44为根据本公开一实施例的光学元件驱动机构沿图42中4
‑
a
‑4‑
a线段的剖视图。
58.图45为根据本公开一实施例的第二驱动组件与基座的俯视图。
59.图46为根据本公开一实施例的第二驱动组件与基座的立体图。
60.图47为根据本公开一实施例的光学元件驱动机构的部分结构的立体图。
61.图48为根据本公开一实施例的图44的放大图。
62.图49为根据本公开一实施例的第二驱动组件的部分结构的放大图。
63.图50为根据本公开一实施例的第二驱动组件的部分结构的俯视图。
64.图51为根据本公开一实施例的第二驱动组件的部分结构俯视图。
65.图52为根据本公开一实施例的第二驱动组件的主视图。
66.图53为根据本公开一实施例的第一连接件、第一支撑元件与固定件的部分结构的主视图。
67.图54为根据本公开另一实施例的第一连接件、第一支撑元件与固定件的部分结构的主视图。
68.图55为根据本公开一实施例的底座、第二驱动组件与基座由底部观察的立体图。
69.图56为根据本公开一实施例的光学元件驱动机构的俯视图。
70.图57为根据本公开一实施例的光学元件驱动机构的爆炸图。
71.图58为根据本公开一实施例的光学元件驱动机构沿图56中5
‑
a
‑5‑
a线段的剖视图。
72.图59为根据本公开一实施例的底座与一电路元件的立体图。
73.图60为根据本公开一实施例的底座与电路元件于另一视角的立体图。
74.图61为根据本公开一实施例的光学元件驱动机构的部分结构的的俯视图。
75.图62为根据本公开一实施例的镜头承载件的部分结构的剖面侧视图。
76.图63为根据本公开一实施例的光学元件驱动机构于另一视角的立体图。
77.图64为根据本公开一实施例的光学元件驱动机构的部分结构的俯视图。
78.图65为根据本公开一实施例的光学元件驱动机构的部分结构的侧视图。
79.图66为根据本公开一实施例的图58的局部放大示意图。
80.图67为根据本公开一实施例的光学元件驱动机构的部分结构的剖面图。
81.图68为根据本公开一实施例的光学元件驱动机构的立体示意图。
82.图69为根据本公开一实施例的一光学元件驱动机构的爆炸图。
83.图70为根据本公开一实施例的光学元件驱动机构沿图68中6
‑
a
‑6‑
a线段的剖视图。
84.图71为根据本公开一实施例的底座的俯视图。
85.图72为根据本公开一实施例的光学元件驱动机构的主视图。
86.图73为根据本公开一实施例的光学元件驱动机构的部分结构的俯视图。
87.图74为根据本公开一实施例的第一弹性元件与框架沿着开槽的一延伸方向观察的剖面图。
88.图75为根据本公开一实施例的光学元件驱动机构的部分结构的立体图。
89.图76为根据本公开一实施例的光学元件驱动机构于另一视角的部分结构的立体图。
90.图77为根据本公开一实施例的光学元件驱动机构的立体示意图。
91.图78为根据本公开一实施例的光学元件驱动机构的爆炸图。
92.图79为根据本公开一实施例的光学元件驱动机构沿图77中7
‑
a
‑7‑
a线段的剖视图。
93.图80为根据本公开一实施例的光学元件驱动机构的移除外壳的立体图。
94.图81为根据本公开一实施例的框架、镜头承载件以及第二弹性元件由底部观察的立体图。
95.图82为根据本公开一实施例的光学元件驱动机构于另一视角的剖面图。
96.图83为根据本公开一实施例的框架、镜头承载件以及第二弹性元件的底部视图。
97.图84为根据本公开一实施例的框架、镜头承载件以及第二弹性元件于另一视角的立体图。
98.图85为根据本公开一实施例的镜头承载件以及电路组件于另一视角的立体剖面图。
99.图86为根据本公开一实施例的镜头承载件的立体图。
100.图87为根据本公开一实施例的电路组件与底座的俯视图。
101.图88为根据本公开一实施例的电路组件与底座的剖面图。
102.图89为根据本公开一实施例的具有一光学元件驱动机构的一电子装置的示意图。
103.图90为根据本公开一实施例的光学元件驱动机构及一光学元件的立体图。
104.图91为根据本公开一实施例的光学元件驱动机构的立体图。
105.图92为根据本公开一实施例的光学元件驱动机构的立体图,其中一外框以虚线表示。
106.图93为根据本公开一实施例的光学元件驱动机构的爆炸图。
107.图94为根据本公开一实施例的光学元件驱动机构的立体图,其中省略外框。
108.图95为根据本公开一实施例的光学元件驱动机构的立体图,其中省略外框。
109.图96为根据本公开一实施例的光学元件驱动机构的主视图,其中省略外框。
110.图97为根据本公开一实施例的光学元件驱动机构沿图91的8
‑
a
‑8‑
a线的剖视图。
111.图98为根据本公开一实施例的光学元件驱动机构沿图91的8
‑
b
‑8‑
b线的剖视图。
112.图99为根据本公开一实施例的光学元件驱动机构沿图91的8
‑
c
‑8‑
c线的剖视图。
113.图100为根据本公开另一实施例的光学元件驱动机构沿图91的8
‑
c
‑8‑
c线的剖视图。
114.图101为根据本公开一实施例的一光学元件驱动机构驱动系统的立体图。
115.图102为根据本公开一实施例的具有一光学元件驱动机构的一电子装置的示意图。
116.图103为根据本公开一实施例的光学元件驱动机构及一光学元件的立体图。
117.图104为根据本公开一实施例的光学元件驱动机构的立体图。
118.图105为根据本公开一实施例的光学元件驱动机构的立体图,其中一第二外框以虚线表示。
119.图106为根据本公开一实施例的光学元件驱动机构的爆炸图。
120.图107为根据本公开一实施例的光学元件驱动机构的立体图,其中省略一第一外框及第二外框。
121.图108为根据本公开一实施例的光学元件驱动机构的立体图,其中省略第二外框,且其中第一外框以虚线表示。
122.图109为根据本公开一实施例的光学元件驱动机构沿图104的9
‑
a
‑9‑
a线的剖视图。
123.图110为根据本公开一实施例的光学元件驱动机构的第一外框及一底座的立体图,其中第一外框以虚线表示。
124.图111为根据本公开一实施例的光学元件驱动机构的俯视图,其中省略第二外框。
125.图112为根据本公开一实施例的光学元件驱动机构的第一外框及一防撞元件的立体图。
126.图113为根据本公开一实施例的光学元件驱动机构的第一外框及防撞元件的立体图。
127.图114为根据本公开一实施例的光学元件驱动机构的第一外框及防撞元件的立体图。
128.图115为根据本公开一实施例的光学元件驱动机构沿图104的9
‑
b
‑9‑
b线的剖视图。
129.图116为根据本公开一实施例的光学元件驱动机构沿图104的9
‑
c
‑9‑
c线的剖视图。
130.图117为根据本公开一实施例的光学元件驱动机构的左侧视图,其中省略第一外框及第二外框,且其中一接着元件以虚线表示。
131.图118为根据本公开另一实施例的光学元件驱动机构沿图104的9
‑
d
‑9‑
d线的剖视图。
132.图119是根据本发明一些实施例所示出的光学元件驱动机构的立体图。
133.图120a是光学元件驱动机构的爆炸图。
134.图120b是光学元件驱动机构的剖面图。
135.图120c是图120b的放大图。
136.图121是光学元件驱动机构中设置有光学元件时的俯视图。
137.图122是光学元件驱动机构的仰视图。
138.图123a是光学元件驱动机构的立体图。
139.图123b是图123a的放大图。
140.图124a是光学元件驱动机构省略外框的俯视图。
141.图124b是图124a的放大图。
142.图125是光学元件驱动机构省略外框的立体图。
143.图126a是光学元件驱动机构省略外框、框架、上弹性元件的立体图。
144.图126b是图126a的放大图。
145.图127是凹陷结构的示意图。
146.图128是光学元件驱动机构省略外框、框架、上弹性元件的俯视图。
147.图129是底座以及电路板的俯视图。
148.图130a是底座以及底座中的电路组件的示意图。
149.图130b是电路组件和控制元件的示意图。
150.图130c以及图130d分别是第一线圈、第三线圈以及第二线圈、第四线圈与电路组件的一些元件进行电性连接时的示意图。
151.图131a以及图131b分别是第一控制元件以及第二控制元件的示意图。
152.图132为本发明一实施例的光学驱动机构的爆炸图。
153.图133为图132中的光学驱动机构组合的示意图(省略外壳11
‑
h)。
154.图134为沿图133中的线段11
‑
a到11
‑
a’的剖视图。
155.图135为基底与偏压组件的示意图。
156.图136为图135中的基底与偏压组件组合后的示意图。
157.图137a为图136中局部基底与偏压组件的示意图。
158.图137b为第一电性连接部与偏压元件的示意图。
159.图137c为基底还包含第一树脂件、偏压元件的表面还包含一保护层和第一电性连接部的示意图。
160.图137d为底还包含第二树脂件、偏压元件的表面还包含一保护层和第二电性连接部的示意图。
161.图138为第一、第二电性连接部具有一高度差的示意图。
162.图139为基底具有一滑块的示意图。
163.图140a为基底具有制震组件的示意图。
164.图140b为基底具有另一实施例的制震组件的示意图。
165.图140c为基底具有另一实施例的制震组件的示意图。
166.图141为本发明另一实施例的阻尼元件11
‑
g设置在框架11
‑
22和外壳11
‑
h之间的示意图。
167.图142为本发明另一实施例的缓冲件11
‑
g沿垂直方向连接承载件11
‑
23和框架11
‑
22的示意图。
168.图143为本发明另一实施例的缓冲件11
‑
g沿水平方向连接承载件11
‑
23和框架11
‑
22的示意图。
169.图144为本发明另一实施例的缓冲件11
‑
g沿水平方向连接承载件11
‑
23和基座11
‑
21的示意图。
170.图145为本发明另一实施例的缓冲件11
‑
g沿水平方向连接磁性组件11
‑
m和承载件11
‑
23侧边的一凸出部11
‑
233的示意图。
171.图146为本发明另一实施例的缓冲件11
‑
g沿水平方向连接磁性组件11
‑
m和承载件11
‑
23侧边的一电路元件11
‑
p的示意图。
172.图147为本发明一实施例的电子装置的示意图。
173.图148为本发明一实施例的光学元件驱动机构的示意图。
174.图149为本发明一实施例的光学元件驱动机构的爆炸图。
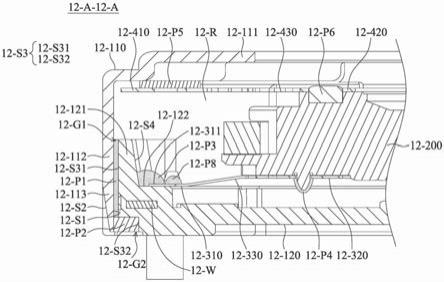
175.图150为图148中沿12
‑
a
‑
12
‑
a方向的剖视图。
176.图151为本发明一实施例中的绕线部、驱动线圈、第一弹性元件以及第七接着元件的示意图。
177.图152为本发明一实施例中的绕线部、驱动线圈、第一弹性元件以及第七接着元件的剖视图。
178.图153为本发明另一实施例中的光学元件驱动机构的示意图。
179.图154为图153中沿12
‑
b
‑
12
‑
b方向的剖视图。
180.图155为本发明一实施例的电子装置的示意图。
181.图156为本发明一实施例的光学元件驱动机构的示意图。
182.图157为本发明一实施例的光学元件驱动机构的爆炸图。
183.图158为图156中沿13
‑
a
‑
13
‑
a方向的剖视图。
184.图159为本发明一实施例中的接着强化结构的示意图。
185.图160为本发明一实施例中的绕线部、驱动线圈、第一弹性元件以及第五接着元件的示意图。
186.图161为本发明一实施例中的绕线部、驱动线圈、第一弹性元件以及第五接着元件的剖视图。
187.图162为图156中沿13
‑
b
‑
13
‑
b方向的剖视图。
188.图163为本发明一实施例的光学元件驱动机构的仰视图。
189.图164为本发明另一实施例中的光学元件驱动机构的局部示意图。
190.附图标记如下:
[0191]1‑
100:光学元件驱动机构
[0192]1‑
102:外壳
[0193]1‑
1021:外壳开孔
[0194]1‑
1023:容置空间
[0195]1‑
104:框架
[0196]1‑
106:第一弹性元件
[0197]1‑
108:镜头承载件
[0198]1‑
1081:安装结构
[0199]1‑
1081g:安装槽
[0200]1‑
1082:绕线结构
[0201]1‑
1083:容置槽
[0202]1‑
1084:粘着元件容置槽
[0203]1‑
1085:第一侧面
[0204]1‑
1086:点胶槽
[0205]1‑
1087:第一点胶沟槽
[0206]1‑
1088:安装部
[0207]1‑
1089:第一角落结构
[0208]1‑
108s1:第一侧边
[0209]1‑
108s2:第二侧边
[0210]1‑
1091:导引沟槽
[0211]1‑
1092:第二点胶沟槽
[0212]1‑
1093:凸出部
[0213]1‑
110:第二弹性元件
[0214]1‑
111:基座
[0215]1‑
1111:基座开孔
[0216]1‑
112:底座
[0217]1‑
112s1:侧边
[0218]1‑
112s2:侧边
[0219]1‑
112sf:第一底座表面
[0220]1‑
131:第一连接件
[0221]1‑
132:第二连接件
[0222]1‑
133:驱动元件
[0223]1‑
134:弹性部
[0224]1‑
141:第一制震元件
[0225]1‑
142:第二制震元件
[0226]1‑
143:第一制震元件
[0227]1‑
144:第二制震元件
[0228]1‑
ad1:粘着元件
[0229]1‑
ad2:粘着元件
[0230]1‑
ad3:粘着元件
[0231]1‑
ad4:粘着元件
[0232]1‑
ax:主轴
[0233]1‑
cl11:第一驱动线圈
[0234]1‑
cl12:第二驱动线圈
[0235]1‑
cnl:中心连线
[0236]1‑
cp1:第一接触部
[0237]1‑
cp2:第二接触部
[0238]1‑
cr1:角落
[0239]1‑
cwr:连接引线
[0240]1‑
d1:第一方向
[0241]1‑
d2:第二方向
[0242]1‑
da1:第一驱动组件
[0243]1‑
da2:第二驱动组件
[0244]1‑
dm:驱动模块
[0245]1‑
fm:固定模块
[0246]1‑
gds1:导引结构
[0247]1‑
gds2:导引结构
[0248]1‑
il1:第一假想连线
[0249]1‑
il2:第二假想连线
[0250]1‑
il3:第三假想连线
[0251]1‑
ll:连线
[0252]1‑
ma1:第一活动组件
[0253]1‑
md:活动模块
[0254]1‑
me11:第一磁性元件
[0255]1‑
me12:第二磁性元件
[0256]1‑
o:光轴
[0257]1‑
wr1:第一引线
[0258]2‑
100:光学元件驱动机构
[0259]2‑
102:外壳
[0260]2‑
1021:外壳开孔
[0261]2‑
1023:容置空间
[0262]2‑
104:框架
[0263]2‑
1041:顶面
[0264]2‑
1043:侧壁
[0265]2‑
1044:第一连接凸部
[0266]2‑
1045:第一侧面
[0267]2‑
105:止挡元件
[0268]2‑
106:第一弹性元件
[0269]2‑
1061:第一外框部
[0270]2‑
1062:第一内框部
[0271]2‑
1063:第一弹性部
[0272]2‑
1065:第一开口
[0273]2‑
1071:焊接部
[0274]2‑
1072:凹陷结构
[0275]2‑
108:镜头承载件
[0276]2‑
110:第二弹性元件
[0277]2‑
1101:第二外框部
[0278]2‑
1102:第二内框部
[0279]2‑
1103:第二弹性部
[0280]2‑
111:基座
[0281]2‑
1111:基座开孔
[0282]2‑
112:底座
[0283]2‑
113:电路构件
[0284]2‑
1131:第二连接凸部
[0285]2‑
1132:第二侧面
[0286]2‑
ad1:黏接元件
[0287]2‑
ax:主轴
[0288]2‑
cl11:第一驱动线圈
[0289]2‑
cl12:第二驱动线圈
[0290]2‑
cr1:第一角落
[0291]2‑
d1:第一方向
[0292]2‑
d2:第二方向
[0293]2‑
da1:第一驱动组件
[0294]2‑
da2:第二驱动组件
[0295]2‑
dm:驱动模块
[0296]2‑
dt1:深度
[0297]2‑
fm:固定模块
[0298]2‑
ma1:第一活动组件
[0299]2‑
md:活动模块
[0300]2‑
md1:最短距离
[0301]2‑
md2:最短距离
[0302]2‑
me11:第一磁性元件
[0303]2‑
me12第二磁性元件
[0304]2‑
o:光轴
[0305]2‑
t11:第一弯折部
[0306]2‑
t12:第二弯折部
[0307]2‑
t1n:第n弯折部
[0308]2‑
t21:第一弯折部
[0309]2‑
t22:第二弯折部
[0310]2‑
t2m:第m弯折部
[0311]2‑
tn1:厚度
[0312]2‑
x:区域
[0313]3‑
100:光学元件驱动机构
[0314]3‑
102:外壳
[0315]3‑
1021:外壳开孔
[0316]3‑
102et1:第一延伸部
[0317]3‑
102et2:第二延伸部
[0318]3‑
102h:开口
[0319]3‑
102s1:第一侧壁
[0320]3‑
102t:顶壁
[0321]3‑
104:框架
[0322]3‑
106:第一弹性元件
[0323]3‑
108:镜头承载件
[0324]3‑
110:第二弹性元件
[0325]3‑
111:基座
[0326]3‑
1111:基座开孔
[0327]3‑
112:底座
[0328]3‑
130:固定件
[0329]3‑
1301:第一接触面
[0330]3‑
1302:第二接触面
[0331]3‑
1304:阻挡部
[0332]3‑
130s1:第一侧边
[0333]3‑
131:第一连接件
[0334]3‑
132:第二连接件
[0335]3‑
133:驱动元件
[0336]3‑
134:弹性部
[0337]3‑
190:电路组件
[0338]3‑
191:电路基板
[0339]3‑
193:强化部
[0340]3‑
ae1:第一黏接元件
[0341]3‑
ae2:第二黏接元件
[0342]3‑
ax:主轴
[0343]3‑
cl11:第一驱动线圈
[0344]3‑
cl12:第二驱动线圈
[0345]3‑
d1:第一方向
[0346]3‑
d2:第二方向
[0347]3‑
da1:第一驱动组件
[0348]3‑
da2:第二驱动组件
[0349]3‑
dm:驱动模块
[0350]3‑
es1:第一外侧面
[0351]3‑
es2:第二外侧面
[0352]3‑
fm:固定模块
[0353]3‑
is1:第一内侧面
[0354]3‑
is2:第二内侧面
[0355]3‑
lg1:接地线
[0356]3‑
lg2:接地线
[0357]3‑
lg2:接地线
[0358]3‑
ln11:金属线路
[0359]3‑
ln12:金属线路
[0360]3‑
ln21:金属线路
[0361]3‑
ln22:金属线路
[0362]3‑
ln31:金属线路
[0363]3‑
ln32:金属线路
[0364]3‑
ln32:金属线路
[0365]3‑
ln41:金属线路
[0366]3‑
ln42:金属线路
[0367]3‑
ma1:第一活动组件
[0368]3‑
md:活动模块
[0369]3‑
me11:第一磁性元件
[0370]3‑
me12:第二磁性元件
[0371]4‑
100:光学元件驱动机构
[0372]4‑
102:外壳
[0373]4‑
1021:外壳开孔
[0374]4‑
102et1:第一延伸部
[0375]4‑
102h:开口
[0376]4‑
102s1:第一侧壁
[0377]4‑
102t:顶壁
[0378]4‑
104:框架
[0379]4‑
106:第一弹性元件
[0380]4‑
108:镜头承载件
[0381]4‑
110:第二弹性元件
[0382]4‑
111:基座
[0383]4‑
1111:基座开孔
[0384]4‑
112:底座
[0385]4‑
130:固定件
[0386]4‑
130h:中央开口
[0387]4‑
130s1:第一侧边
[0388]4‑
131:第一连接件
[0389]4‑
1311:第一夹持件
[0390]4‑
1312:第二夹持件
[0391]4‑
1313:第三夹持件
[0392]4‑
131h:定位孔
[0393]4‑
131s:上表面
[0394]4‑
131t:第一开孔
[0395]4‑
132:第二连接件
[0396]4‑
133:驱动元件
[0397]4‑
1331:第一交界部
[0398]4‑
1332:第二交界部
[0399]4‑
134:弹性部
[0400]4‑
141:第一弯折件
[0401]4‑
1411:第一弯折部
[0402]4‑
1412:第二弯折部
[0403]4‑
1413:第三弯折部
[0404]4‑
1414:第一连接部
[0405]4‑
1415:第二连接部
[0406]4‑
142:第二弯折件
[0407]4‑
180:电路构件
[0408]4‑
180e:外露部
[0409]4‑
181:第一支撑元件
[0410]4‑
1811:支撑面
[0411]4‑
182:第二支撑元件
[0412]4‑
190:电路组件
[0413]4‑
191:电路基板
[0414]4‑
ae1:第一黏接元件
[0415]4‑
ax:主轴
[0416]4‑
cl11:第一驱动线圈
[0417]4‑
cl12:第二驱动线圈
[0418]4‑
d1:第一方向
[0419]4‑
d2:第二方向
[0420]4‑
da1:第一驱动组件
[0421]4‑
da2:第二驱动组件
[0422]4‑
dm:驱动模块
[0423]4‑
fm:固定模块
[0424]4‑
ma1:第一活动组件
[0425]4‑
md:活动模块
[0426]4‑
me11:第一磁性元件
[0427]4‑
me12:第二磁性元件
[0428]4‑
sdp:焊接部
[0429]4‑
sg1:第一稳定元件
[0430]5‑
100:光学元件驱动机构
[0431]5‑
102:外壳
[0432]5‑
1021:外壳开孔
[0433]5‑
1023:容置空间
[0434]5‑
102s1:第一侧壁
[0435]5‑
102s2:第二侧壁
[0436]5‑
104:框架
[0437]5‑
1041:第一导磁部
[0438]5‑
1042:第二导磁部
[0439]5‑
1043:连接部
[0440]5‑
106:第一弹性元件
[0441]5‑
108:镜头承载件
[0442]5‑
1080:本体
[0443]5‑
1081:第一止动元件
[0444]5‑
1083:突块
[0445]5‑
1085:阶梯结构
[0446]5‑
108p:电性连接部
[0447]5‑
108s1:第一表面
[0448]5‑
108s2:第二表面
[0449]5‑
110:第二弹性元件
[0450]5‑
1101:第二弹性元件表面
[0451]5‑
112:底座
[0452]5‑
1121:底座开孔
[0453]5‑
112s1:第一侧边
[0454]5‑
112s2:第二侧边
[0455]5‑
112s3:第三侧边
[0456]5‑
113:结构强化组件
[0457]5‑
1131:第一强化元件
[0458]5‑
1132:第二强化元件
[0459]5‑
1133:第一连接结构
[0460]5‑
1134:第二连接结构
[0461]5‑
1135:第一止动部
[0462]5‑
114:电路构件
[0463]5‑
120:电路组件
[0464]5‑
1200:封装元件
[0465]5‑
1201:电路元件
[0466]5‑
1203:位置感测元件
[0467]5‑
1204:控制元件
[0468]5‑
1205:被动元件
[0469]5‑
ad1:第一接着元件
[0470]5‑
ad2:第二接着元件
[0471]5‑
as1:第一容纳空间
[0472]5‑
ax:主轴
[0473]5‑
cl11:第一线圈
[0474]5‑
cl11:第一线圈
[0475]5‑
cl12:第二线圈
[0476]5‑
d1:第一方向
[0477]5‑
d2:第二方向
[0478]5‑
d3:第三方向
[0479]5‑
d4:第四方向
[0480]5‑
da:驱动组件
[0481]5‑
fa:固定组件
[0482]5‑
m11:第一磁铁
[0483]5‑
m12:第二磁铁
[0484]5‑
ma:活动组件
[0485]5‑
o:光轴
[0486]5‑
tr:第一沟槽
[0487]5‑
tr2:第二沟槽
[0488]5‑
tr3:第三沟槽
[0489]5‑
tr4:第四沟槽
[0490]5‑
wr1:引线
[0491]6‑
100:光学元件驱动机构
[0492]6‑
102:外壳
[0493]6‑
1021:壳体开孔
[0494]6‑
1023:容置空间
[0495]6‑
102c:凹口
[0496]6‑
104:框架
[0497]6‑
1041:凹槽
[0498]6‑
1043:中央开口
[0499]6‑
1044:定位柱
[0500]6‑
1045:凸块
[0501]6‑
104c:梯形凹槽
[0502]6‑
106:第一弹性元件
[0503]6‑
1061:外侧定位部
[0504]6‑
1062:内侧定位部
[0505]6‑
1064:外侧弦线
[0506]6‑
1065:内侧弦线
[0507]6‑
106st:开槽
[0508]6‑
108:镜头承载件
[0509]6‑
1081:贯穿孔
[0510]6‑
1083:圆角
[0511]6‑
108c:内凹结构
[0512]6‑
108p:绕线结构
[0513]6‑
108st:沟槽
[0514]6‑
110:第二弹性元件
[0515]6‑
112:底座
[0516]6‑
1121:底座开孔
[0517]6‑
112s1:第一侧边
[0518]6‑
112s2:第二侧边
[0519]6‑
112s3:第三侧边
[0520]6‑
112s4:第四侧边
[0521]6‑
114:电路组件
[0522]6‑
1141:感应线圈
[0523]6‑
116:弹性元件
[0524]6‑
117:第一电路构件
[0525]6‑
1171:接脚
[0526]6‑
1172:内凹部
[0527]6‑
1173:凸出部
[0528]6‑
118:第二电路构件
[0529]6‑
ac:容置槽
[0530]6‑
ae1:第一粘着元件
[0531]6‑
ax:主轴
[0532]6‑
cld:驱动线圈
[0533]6‑
co1:封闭开口
[0534]6‑
co2:封闭开口
[0535]6‑
co3:封闭开口
[0536]6‑
d1:第一方向
[0537]6‑
da1:第一驱动组件
[0538]6‑
da2:第二驱动组件
[0539]6‑
fa:固定组件
[0540]6‑
gp:间隙
[0541]6‑
ma:活动组件
[0542]6‑
me:磁性元件
[0543]6‑
o:光轴
[0544]6‑
ph1:定位孔
[0545]6‑
se1:第一稳定元件
[0546]6‑
wr1:引线
[0547]7‑
100:光学元件驱动机构
[0548]7‑
102:外壳
[0549]7‑
1021:壳体开孔
[0550]7‑
1023:容置空间
[0551]7‑
104:框架
[0552]7‑
1041:凹槽
[0553]7‑
1043:中央开口
[0554]7‑
1045:凸出结构
[0555]7‑
104bs:底面
[0556]7‑
104c:定位槽
[0557]7‑
104p:止挡结构
[0558]7‑
104s1:侧边
[0559]7‑
104vc:闪避凹槽
[0560]7‑
106:第一弹性元件
[0561]7‑
108:镜头承载件
[0562]7‑
1081:贯穿孔
[0563]7‑
1085:止挡件
[0564]7‑
1086:第一内环面
[0565]7‑
1087:第二内环面
[0566]7‑
108pp:凸部
[0567]7‑
110:第二弹性元件
[0568]7‑
1101:外侧定位部
[0569]7‑
1102:内侧定位部
[0570]7‑
1103:连接弦线
[0571]7‑
1105:夹钳结构
[0572]7‑
110h:开口
[0573]7‑
112:底座
[0574]7‑
1121:底座开孔
[0575]7‑
1123:承接部
[0576]7‑
114:电路组件
[0577]7‑
1141:感应线圈
[0578]7‑
116:弹性元件
[0579]7‑
ae:接着元件
[0580]7‑
ax:主轴
[0581]7‑
ce:捕捉元件
[0582]7‑
ce1:第一夹钳端
[0583]7‑
ce2:第二夹钳端
[0584]7‑
cld:动线圈
[0585]7‑
d1:第一方向
[0586]7‑
d2:第二方向
[0587]7‑
da1:第一驱动组件
[0588]7‑
da2:第二驱动组件
[0589]7‑
ds1:第一距离
[0590]7‑
ds2:第二距离
[0591]7‑
fa:固定组件
[0592]7‑
ft1:第一圆角结构
[0593]7‑
ft2:第二圆角结构
[0594]7‑
is1:第一斜面
[0595]7‑
is2:第二斜面
[0596]7‑
ma:活动组件
[0597]7‑
me:磁性元件
[0598]7‑
o:光轴
[0599]7‑
sr1:接触面
[0600]7‑
sr2:非接触面
[0601]8‑
1:电子装置
[0602]8‑
10:固定部
[0603]8‑
11:外框
[0604]8‑
12:框架
[0605]8‑
13:底座
[0606]8‑
20:活动部
[0607]8‑
21:光学元件承载座
[0608]8‑
22:活动部凹槽
[0609]8‑
23:活动部延伸柱
[0610]8‑
30:驱动组件
[0611]8‑
31:驱动线圈
[0612]8‑
32:驱动磁性元件
[0613]8‑
40:弹性组件
[0614]8‑
41:第一弹性元件
[0615]8‑
41a:弹性组件连接部
[0616]8‑
42:第二弹性元件
[0617]8‑
50:电路组件
[0618]8‑
60:电路构件
[0619]8‑
70:接着元件
[0620]8‑
80:制震元件
[0621]8‑
111:外框顶表面
[0622]8‑
112:外框侧壁
[0623]8‑
121:第一框架延伸部
[0624]8‑
122:第二框架延伸部
[0625]8‑
131:底座本体
[0626]8‑
132:底座柱
[0627]8‑
132a:第一底座柱表面
[0628]8‑
132b:第二底座柱表面
[0629]8‑
132b’:凹凸结构
[0630]8‑
133:底座角柱
[0631]8‑
d1:第一方向
[0632]8‑
d2:第二方向
[0633]8‑
g:间格
[0634]8‑
l:光线
[0635]8‑
oa:光轴
[0636]8‑
oe:光学元件
[0637]8‑
om:光学元件驱动机构
[0638]8‑
om1:第一光学元件驱动机构
[0639]8‑
om1
‑
10:第一机构固定部
[0640]8‑
om1
‑
20:第一机构活动部
[0641]8‑
om1
‑
30:第一机构驱动组件
[0642]8‑
om2:第二光学元件驱动机构
[0643]8‑
om2
‑
10:第二机构固定部
[0644]8‑
om2
‑
20:第二机构活动部
[0645]8‑
om2
‑
22:第二机构活动部凹槽
[0646]8‑
om2
‑
30:第二机构驱动组件
[0647]8‑
om2
‑
50:第二机构电路组件
[0648]8‑
om2
‑
121:第二机构第一框架延伸部
[0649]8‑
om2
‑
122:第二机构第二框架延伸部
[0650]8‑
s1:最短距离
[0651]8‑
s2:最短距离
[0652]9‑
1:电子装置
[0653]9‑
10:固定部
[0654]9‑
11:第一外框
[0655]9‑
12:第二外框
[0656]9‑
13:底座
[0657]9‑
14:底板
[0658]9‑
15:防撞元件
[0659]9‑
20:活动部
[0660]9‑
21:光学元件承载座
[0661]9‑
30:驱动组件
[0662]9‑
31:驱动线圈
[0663]9‑
32:驱动磁性元件
[0664]9‑
40:弹性组件
[0665]9‑
41:第一弹性元件
[0666]9‑
42:第二弹性元件
[0667]9‑
50:电路组件
[0668]9‑
51:电路组件凹部
[0669]9‑
52:电路组件连接部
[0670]9‑
53:电路组件开口
[0671]9‑
60:电路构件
[0672]9‑
61:电路构件连接部
[0673]9‑
70:接着元件
[0674]9‑
111:第一外框顶面
[0675]9‑
112:第一侧壁
[0676]9‑
113:第二侧壁
[0677]9‑
114:第一开口
[0678]9‑
115:第一外框凹部
[0679]9‑
116:第二开口
[0680]9‑
117:第三开口
[0681]9‑
121:第二外框顶面
[0682]9‑
122:第二外框侧壁
[0683]9‑
131:底座本体
[0684]9‑
132:底座延伸部
[0685]9‑
132a:台阶
[0686]9‑
132b:台阶壁
[0687]9‑
133:底座柱
[0688]9‑
133a:底座柱凹槽
[0689]9‑
134:底座凹槽
[0690]9‑
135:底座壁
[0691]9‑
135a:底座壁凹凸结构
[0692]9‑
521:第一表面
[0693]9‑
522:第二表面
[0694]9‑
523:第三表面
[0695]9‑
d1:第一方向
[0696]9‑
d2:第二方向
[0697]9‑
l:光线
[0698]9‑
oa:光轴
[0699]9‑
oe:光学元件
[0700]9‑
om:光学元件驱动机构
[0701]9‑
s1:最短距离
[0702]9‑
s2:最短距离
[0703]9‑
s3:最短距离
[0704]9‑
s4:最短距离
[0705]
10
‑
5:光学元件
[0706]
10
‑
5a:凸出部
[0707]
10
‑
10:外框
[0708]
10
‑
10a:顶面
[0709]
10
‑
10b:侧壁
[0710]
10
‑
20:底座
[0711]
10
‑
21:底表面
[0712]
10
‑
22:凹槽
[0713]
10
‑
30:承载座
[0714]
10
‑
32:内凹部
[0715]
10
‑
34:凹陷结构
[0716]
10
‑
35,10
‑
36:凸出结构
[0717]
10
‑
40:第五线圈
[0718]
10
‑
50:框架
[0719]
10
‑
60:磁性元件
[0720]
10
‑
60a:第一磁性元件
[0721]
10
‑
60b:第二磁性元件
[0722]
10
‑
60c:第三磁性元件
[0723]
10
‑
60d:第四磁性元件
[0724]
10
‑
70:上弹性元件
[0725]
10
‑
70a:第一弹性元件
[0726]
10
‑
70b:第二弹性元件
[0727]
10
‑
70c:第三弹性元件
[0728]
10
‑
70d:第四弹性元件
[0729]
10
‑
72:第六弹性元件
[0730]
10
‑
74,10
‑
74a,10
‑
74b,10
‑
74c,10
‑
74d:第五弹性元件
[0731]
10
‑
80:电路板
[0732]
10
‑
82:驱动线圈
[0733]
10
‑
82a:第一线圈
[0734]
10
‑
82b:第二线圈
[0735]
10
‑
82c:第三线圈
[0736]
10
‑
82d:第四线圈
[0737]
10
‑
84:电路组件
[0738]
10
‑
84a:第一电路端子
[0739]
10
‑
84b:第二电路端子
[0740]
10
‑
84c:第三电路端子
[0741]
10
‑
84d:第四电路端子
[0742]
10
‑
84e:第五电路端子
[0743]
10
‑
84f:第六电路端子
[0744]
10
‑
86:控制元件
[0745]
10
‑
86a:第一控制元件
[0746]
10
‑
86a1:第一感测单元
[0747]
10
‑
86a2:第一记忆单元
[0748]
10
‑
86a3:第一控制单元
[0749]
10
‑
86b:第二控制元件
[0750]
10
‑
86b1:第二感测单元
[0751]
10
‑
86b2:第二记忆单元
[0752]
10
‑
86b3:第二控制单元
[0753]
10
‑
87:底表面
[0754]
10
‑
100:光学元件驱动机构
[0755]
10
‑
c1:第一电性接点
[0756]
10
‑
c2:第二电性接点
[0757]
10
‑
c3:第三电性接点
[0758]
10
‑
c4:第四电性接点
[0759]
10
‑
c5:第五电性接点
[0760]
10
‑
c6:第六电性接点
[0761]
10
‑
88a,10
‑
88b:接地元件
[0762]
10
‑
88a1,10
‑
88a2,10
‑
88b1:延伸部
[0763]
10
‑
88a3,10
‑
88b3:孔洞
[0764]
10
‑
89a,10
‑
89b,10
‑
89c,10
‑
89d,10
‑
89e:延伸线路
[0765]
10
‑
d:驱动组件
[0766]
10
‑
f:固定部
[0767]
10
‑
h1:深度
[0768]
10
‑
h2,10
‑
h3:高度
[0769]
10
‑
m:活动部
[0770]
10
‑
o:主轴
[0771]
10
‑
q1:第一象限
[0772]
10
‑
q2:第二象限
[0773]
10
‑
q3:第三象限
[0774]
10
‑
q4:第四象限
[0775]
10
‑
r:弹性组件
[0776]
10
‑
s1:第一侧边
[0777]
10
‑
s2:第二侧边
[0778]
10
‑
v1:第一假想线
[0779]
10
‑
v2:第二假想线
[0780]
11
‑
1:光学驱动机构
[0781]
11
‑
10:基底
[0782]
11
‑
101:第一电性连接部
[0783]
11
‑
102:第二电性连接部
[0784]
11
‑
11:固定本体
[0785]
11
‑
111:固定凸部
[0786]
11
‑
12:绝缘层
[0787]
11
‑
121:缓冲部
[0788]
11
‑
13:导电层
[0789]
11
‑
14:活动件
[0790]
11
‑
141:连接凸部
[0791]
11
‑
142:延伸凸部
[0792]
11
‑
143:弦臂
[0793]
11
‑
15:第一树脂件
[0794]
11
‑
16:第二树脂件
[0795]
11
‑
17:滑块
[0796]
11
‑
18:制震组件
[0797]
11
‑
181:制震元件(第一制震元件)
[0798]
11
‑
182:制震元件(第二制震元件)
[0799]
11
‑
183:制震元件(第三制震元件)
[0800]
11
‑
184:制震元件(第四制震元件)
[0801]
11
‑
20:活动部
[0802]
11
‑
21:基座
[0803]
11
‑
211:凸柱
[0804]
11
‑
22:框架
[0805]
11
‑
221:内侧表面
[0806]
11
‑
222:顶面
[0807]
11
‑
23:承载件
[0808]
11
‑
231:外侧表面
[0809]
11
‑
232:顶面
[0810]
11
‑
233:凸出部
[0811]
11
‑
24:上簧片
[0812]
11
‑
25:下簧片
[0813]
11
‑
c:线圈组件
[0814]
11
‑
f1:第一夹持力
[0815]
11
‑
f2:第二夹持力
[0816]
11
‑
g:阻尼元件
[0817]
11
‑
g:缓冲件
[0818]
11
‑
h:外壳
[0819]
11
‑
ls:光学元件
[0820]
11
‑
m:磁性组件
[0821]
11
‑
mc:驱动组件
[0822]
11
‑
o:光轴
[0823]
11
‑
p:电路元件
[0824]
11
‑
r:粘着剂
[0825]
11
‑
v:导磁组件
[0826]
11
‑
w:偏压组件
[0827]
11
‑
ws:偏压元件
[0828]
11
‑
wss:保护层
[0829]
11
‑
t1、11
‑
t2、11
‑
t2’、11
‑
t3、11
‑
t3’、11
‑
t4、11
‑
t4’、11
‑
t4”:间隙(或距离)
[0830]
12
‑
10:光学元件驱动机构
[0831]
12
‑
20:电子装置
[0832]
12
‑
30:光学元件
[0833]
12
‑
110:第一元件
[0834]
12
‑
111:顶壁
[0835]
12
‑
112:侧壁
[0836]
12
‑
113:第一渐缩结构
[0837]
12
‑
120:第二元件
[0838]
12
‑
121:第二渐缩结构
[0839]
12
‑
122:第一接着表面
[0840]
12
‑
200:活动部
[0841]
12
‑
210:绕线部
[0842]
12
‑
300:第一弹性元件
[0843]
12
‑
310:第一固定部连接段
[0844]
12
‑
311:第二接着表面
[0845]
12
‑
320:第一活动部连接段
[0846]
12
‑
330:第一弹性变形段
[0847]
12
‑
400:第二弹性元件
[0848]
12
‑
410:第二固定部连接段
[0849]
12
‑
420:第二活动部连接段
[0850]
12
‑
430:第二弹性变形段
[0851]
12
‑
500:驱动组件
[0852]
12
‑
510:驱动线圈
[0853]
12
‑
520:磁性元件
[0854]
12
‑
ax1:主轴
[0855]
12
‑
g1:第一间隙
[0856]
12
‑
g2:第二间隙
[0857]
12
‑
p1:第一接着元件
[0858]
12
‑
p2:第二接着元件
[0859]
12
‑
p3:第三接着元件
[0860]
12
‑
p4:第四接着元件
[0861]
12
‑
p5:第五接着元件
[0862]
12
‑
p6:第六接着元件
[0863]
12
‑
p7:第七接着元件
[0864]
12
‑
p71:导电区段
[0865]
12
‑
p72:接着区段
[0866]
12
‑
p8:第八接着元件
[0867]
12
‑
p9:第九接着元件
[0868]
12
‑
r:容纳空间
[0869]
12
‑
s1:第一表面
[0870]
12
‑
s2:第二表面
[0871]
12
‑
s3:第三表面
[0872]
12
‑
s4:第四表面
[0873]
12
‑
s31:区段
[0874]
12
‑
s32:区段
[0875]
12
‑
w:导线
[0876]
13
‑
10:光学元件驱动机构
[0877]
13
‑
20:电子装置
[0878]
13
‑
30:光学元件
[0879]
13
‑
100:活动部
[0880]
13
‑
110:承载座
[0881]
13
‑
111:接着强化结构
[0882]
13
‑
112:连接部
[0883]
13
‑
112a:凸出区段
[0884]
13
‑
112b:定位区段
[0885]
13
‑
113:绕线部
[0886]
13
‑
120:第一弹性元件
[0887]
13
‑
121:连接段
[0888]
13
‑
122:连接段
[0889]
13
‑
123:弦线段
[0890]
13
‑
124:开口
[0891]
13
‑
130:第二弹性元件
[0892]
13
‑
131:连接段
[0893]
13
‑
132:连接段
[0894]
13
‑
133:弦线段
[0895]
13
‑
140:框架
[0896]
13
‑
200:第一驱动组件
[0897]
13
‑
210:驱动线圈
[0898]
13
‑
220:磁性元件
[0899]
13
‑
300:固定部
[0900]
13
‑
310:外框
[0901]
13
‑
311:顶壁
[0902]
13
‑
312:侧壁
[0903]
13
‑
320:底座
[0904]
13
‑
321:表面
[0905]
13
‑
322:表面
[0906]
13
‑
400:吊环线
[0907]
13
‑
500:第二驱动组件
[0908]
13
‑
510:电路板
[0909]
13
‑
600:位置感测组件
[0910]
13
‑
ax1:主轴
[0911]
13
‑
g1:第一间隙
[0912]
13
‑
g2:第二间隙
[0913]
13
‑
p1:第一接着元件
[0914]
13
‑
p2:第二接着元件
[0915]
13
‑
p3:第三接着元件
[0916]
13
‑
p4:第四接着元件
[0917]
13
‑
p5:第五接着元件
[0918]
13
‑
p51:导电区域
[0919]
13
‑
p52:接着区域
[0920]
13
‑
p6:第六接着元件
[0921]
13
‑
p7:第七接着元件
[0922]
13
‑
p8:第八接着元件
[0923]
13
‑
p9:第九接着元件
[0924]
13
‑
p10:第十接着元件
[0925]
13
‑
p11:补强接着元件
[0926]
13
‑
r:容纳空间
[0927]
13
‑
r1:第一容纳空间
[0928]
13
‑
r2:第二容纳空间
[0929]
13
‑
s1:第一接着表面
[0930]
13
‑
s2:第二接着表面
[0931]
13
‑
s3:第三接着表面
[0932]
13
‑
s4:第四接着表面
[0933]
13
‑
s5:第五接着表面
[0934]
13
‑
s6:第六接着表面
[0935]
13
‑
s7:第七接着表面
[0936]
13
‑
s8:第八接着表面
[0937]
13
‑
s9:第九接着表面
[0938]
13
‑
t1:第一突起结构
[0939]
13
‑
t2:第二突起结构
[0940]
13
‑
w:电路组件
[0941]
13
‑
w1:电性接点
具体实施方式
[0942]
以下说明本发明的光学元件驱动机构。然而,可轻易了解本发明提供许多合适的发明概念而可实施于广泛的各种特定背景。所公开的特定实施例仅仅用于说明以特定方法使用本发明,并非用以局限本发明的范围。
[0943]
除非另外定义,在此使用的全部用语(包括技术及科学用语)具有与此篇公开所属的本领域技术人员所通常理解的相同涵义。能理解的是这些用语,例如在通常使用的字典中定义的用语,应被解读成具有一与相关技术及本发明的背景或上下文一致的意思,而不应以一理想化或过度正式的方式解读,除非在此特别定义。
[0944]
请参考图1至图3,图1为根据本公开一实施例的光学元件驱动机构1
‑
100的立体图,图2为根据本公开一实施例的光学元件驱动机构1
‑
100的爆炸图,并且图3为根据本公开一实施例的光学元件驱动机构1
‑
100沿图1中1
‑
a
‑1‑
a线段的剖视图。光学元件驱动机构1
‑
100可为一光学摄像模块,配置以承载并驱动一光学元件。光学元件驱动机构1
‑
100是可安装于各种电子装置或可携式电子装置,例如设置于智能手机,以供使用者执行图像提取的功能。于此实施例中,光学元件驱动机构1
‑
100可为具有具备自动对焦(af)功能的音圈马达(vcm),但本公开不以此为限。在其他实施例中,光学元件驱动机构1
‑
100也可具备自动对焦(af)及光学防手震(ois)功能。
[0945]
在本实施例中,光学元件驱动机构1
‑
100可包含一固定模块1
‑
fm、一活动模块1
‑
md以及一驱动模块1
‑
dm。活动模块1
‑
md是活动地连接固定模块1
‑
fm,并且活动模块1
‑
md是配置以承载一光学元件(图中未表示)。驱动模块1
‑
dm是用以驱动活动模块1
‑
md相对固定模块1
‑
fm运动。
[0946]
于此实施例中,如图2所示,固定模块1
‑
fm包含一外壳1
‑
102以及一基座1
‑
111,活动模块1
‑
md包含一镜头承载件1
‑
108以及前述的光学元件,并且镜头承载件1
‑
108是用以承载所述光学元件。镜头承载件1
‑
108与所述光学元件可合称为一第一活动组件1
‑
ma1。
[0947]
如图2所示,前述外壳1
‑
102具有一中空结构,并且其上形成有一外壳开孔1
‑
1021,基座1
‑
111上形成有一基座开孔1
‑
1111,外壳开孔1
‑
1021的中心是对应于光学元件的光轴1
‑
o,并且基座开孔1
‑
1111是对应于设置在基座1
‑
111下方的感光元件(如图中未表示)。外部光线可由外壳开孔1
‑
1021进入外壳1
‑
102且经过光学元件与基座开孔1
‑
1111后由前述感光元件150所接收,以产生一数字图像信号。
[0948]
再者,外壳1
‑
102是设置于基座1
‑
111上,并且可具有一容置空间1
‑
1023,用以容置活动模块1
‑
md(包含前述光学元件、镜头承载件1
‑
108)以及驱动模块1
‑
dm。
[0949]
活动模块1
‑
md可还包含一框架1
‑
104以及一底座1
‑
112,沿着一主轴1
‑
ax排列。主轴1
‑
ax可平行或重叠于光轴1
‑
o。框架1
‑
104是固定地连接于底座1
‑
112,并且底座1
‑
112是通过一第二驱动组件1
‑
da2活动地连接于基座1
‑
111。
[0950]
活动模块1
‑
md可还包含一第一弹性元件1
‑
106以及一第二弹性元件1
‑
110,第一弹性元件1
‑
106的外侧部分(外环部)是固定于框架1
‑
104,第二弹性元件1
‑
110的外侧部分(外环部)是固定于底座1
‑
112,并且第一弹性元件1
‑
106以及第二弹性元件1
‑
110的内侧部分(内环部)是分别连接于镜头承载件1
‑
108的上下两侧,使得镜头承载件1
‑
108能以悬吊的方式设置于容置空间1
‑
1023内。
[0951]
于此实施例中,驱动模块1
‑
dm可包含一第一驱动组件1
‑
da1以及第二驱动组件1
‑
da2。第一驱动组件1
‑
da1可包含一第一磁性元件1
‑
me11(第一驱动磁铁)、一第二磁性元件1
‑
me12(第二驱动磁铁)、一第一驱动线圈1
‑
cl11以及一第二驱动线圈1
‑
cl12。第一磁性元件1
‑
me11、第二磁性元件1
‑
me12是分别对应于第一驱动线圈1
‑
cl11以及第二驱动线圈1
‑
cl12且设置在框架1
‑
104上。
[0952]
于此实施例中,第一驱动线圈1
‑
cl11与第二驱动线圈1
‑
cl12可为绕线线圈,设置于镜头承载件1
‑
108的相反两侧上。当第一驱动线圈1
‑
cl11以及第二驱动线圈1
‑
cl12通电时,可分别与第一磁性元件1
‑
me11以及第二磁性元件1
‑
me12产生电磁驱动力(electromagnetic force),以驱动镜头承载件1
‑
108以及所承载的光学元件相对于底座1
‑
112沿着光轴1
‑
o的方向(z轴方向)移动。
[0953]
再者,第二驱动组件1
‑
da2是连接于底座1
‑
112与基座1
‑
111之间,并且第二驱动组件1
‑
da2是可驱动活动模块1
‑
md沿着xy平面运动,以达成光学防手震的功效。
[0954]
请参考图4,图4为根据本公开一实施例的第二驱动组件1
‑
da2与基座1
‑
111的俯视图。于此实施例中,如图4所示,第二驱动组件1
‑
da2可包括一第一连接件1
‑
131、一第二连接件1
‑
132、一驱动元件1
‑
133以及一弹性部1
‑
134。第一连接件1
‑
131是固定地连接于底座1
‑
112,第二连接件1
‑
132是固定地连接于基座1
‑
111,并且第二连接件1
‑
132是经由弹性部1
‑
134活动地连接于第一连接件1
‑
131。
[0955]
驱动元件1
‑
133是连接于第一连接件1
‑
131以及基座1
‑
111之间,并且驱动元件1
‑
133可为形状记忆合金(shape memory alloys,sma)制成。形状记忆合金是一种在加热升温后能完全消除其在较低的温度下发生的变形,恢复其变形前原始形状的合金材料。当形状记忆合金在低于相变态温度下,受到一有限度的塑性变形后,可由加热的方式使其恢复到变形前的原始形状。通过控制驱动元件1
‑
133的温度,可以使得活动模块1
‑
md可相对于基座1
‑
111运动。
[0956]
请参考图5,图5为根据本公开一实施例的镜头承载件1
‑
108与底座1
‑
112的俯视图。于此实施例中,光学元件驱动机构1
‑
100可还包括一第一制震元件1
‑
141,用以调整镜头承载件1
‑
108(第一活动组件1
‑
ma1)相对底座1
‑
112的阻尼参数。第一制震元件1
‑
141是设置于第一活动组件1
‑
ma1与底座1
‑
112之间,并且第一制震元件1
‑
141是直接接触底座1
‑
112与第一活动组件1
‑
ma1。
[0957]
当沿着主轴1
‑
ax观察时,底座1
‑
112具有多边形结构,并且底座1
‑
112具有偶数侧边。具体而言,如图5所示,当沿着主轴1
‑
ax观察时,底座1
‑
112具有矩形结构且具有四个侧边。
[0958]
当沿着主轴1
‑
ax观察时,第一制震元件1
‑
141的中心与光学元件驱动机构1
‑
100的中心(例如主轴1
‑
ax)定义的一第一假想连线1
‑
il1不穿过底座1
‑
112或镜头承载件1
‑
108的任意角落。
[0959]
举例来说,底座1
‑
112具有侧边1
‑
112s1以及侧边1
‑
112s2,侧边1
‑
112s1沿着y轴延伸,侧边1
‑
112s2沿着x轴延伸,并且侧边1
‑
112s1与侧边1
‑
112s2可延伸交会于一角落1
‑
cr1。如图5所示,第一假想连线1
‑
il1不穿过角落1
‑
cr1。
[0960]
相似地,光学元件驱动机构1
‑
100还包括一第二制震元件1
‑
142,用以调整第一活动组件1
‑
ma1相对底座1
‑
112的阻尼参数。当沿着主轴1
‑
ax观察时,第二制震元件1
‑
142的中心与光学元件驱动机构1
‑
100的中心的一第二假想连线1
‑
il2不穿过底座1
‑
112或镜头承载
件1
‑
108的任意角落,并且第一假想连线1
‑
il1与第二假想连线1
‑
il2不平行。
[0961]
第一制震元件1
‑
141与第二制震元件1
‑
142可为凝胶,但不限于此。于本公开中,第一制震元件1
‑
141仅直接接触第一活动组件1
‑
ma1与底座1
‑
112,并且第二制震元件1
‑
142仅直接接触第一活动组件1
‑
ma1与底座1
‑
112。举例来说,第一制震元件1
‑
141与第二制震元件1
‑
142不会设置在光学元件驱动机构1
‑
100的其他元件上,例如第一弹性元件1
‑
106。
[0962]
请参考图6,图6为根据本公开一实施例的图5的右下角区域的立体放大图。底座1
‑
112还具有一第一底座表面1
‑
112sf,面朝第一制震元件1
‑
141。第一底座表面1
‑
112sf与主轴1
‑
ax平行。当沿着主轴1
‑
ax观察时,第一底座表面1
‑
112sf与底座1
‑
112的侧边1
‑
112s1平行。
[0963]
如图5所示,光学元件驱动机构1
‑
100还包括另一第一制震元件1
‑
143以及另一第二制震元件1
‑
144。当沿着主轴1
‑
ax观察时,这些第一制震元件以及这些第二制震元件是相对于主轴1
‑
ax旋转对称。
[0964]
第一活动组件1
‑
ma1的镜头承载件1
‑
108具有一第一侧边1
‑
108s1,第一侧边1
‑
108s1的中心与主轴1
‑
ax定义有一第三假想连线1
‑
il3,并且当沿着主轴1
‑
ax观察时,第一假想连线1
‑
il1与第三假想连线1
‑
il3之间的夹角小于45度。
[0965]
请参考图7至图9,图7为根据本公开一实施例的镜头承载件1
‑
108、第一驱动线圈1
‑
cl11与第二驱动线圈1
‑
cl12的俯视图,图8为根据本公开一实施例的镜头承载件1
‑
108与第一驱动线圈1
‑
cl11的放大图,并且图9为根据本公开一实施例的镜头承载件1
‑
108与第一驱动线圈1
‑
cl11的侧视图。
[0966]
如图7所示,第二驱动线圈1
‑
cl12是与第一驱动线圈1
‑
cl11电性连接。具体而言,第一驱动组件1
‑
da1可还包含一连接引线1
‑
cwr,并且第一驱动线圈1
‑
cl11是经由连接引线1
‑
cwr电性连接第二驱动线圈1
‑
cl12。
[0967]
第一活动组件1
‑
ma1的镜头承载件1
‑
108具有一安装结构1
‑
1081,并且第一驱动线圈1
‑
cl11是套设于安装结构1
‑
1081上。如图8所示,第一活动组件1
‑
ma1的镜头承载件1
‑
108可还具有一绕线结构1
‑
1082以及一容置槽1
‑
1083,第一驱动线圈1
‑
cl11的一第一引线1
‑
wr1设置于容置槽1
‑
1083内并且缠绕于绕线结构1
‑
1082上。
[0968]
容置槽1
‑
1083为一长条型沟槽,并且第一活动组件1
‑
ma1的镜头承载件1
‑
108可还具有一粘着元件容置槽1
‑
1084,设置于容置槽1
‑
1083中。粘着元件容置槽1
‑
1084是配置以容置一粘着元件1
‑
ad1,以避免第一引线1
‑
wr1脱离容置槽1
‑
1083。
[0969]
于此实施例中,第一活动组件1
‑
ma1的镜头承载件1
‑
108可具有一第一侧面1
‑
1085,朝向第一驱动线圈1
‑
cl11,并且第一侧面1
‑
1085上有两个点胶槽1
‑
1086,设置第一驱动线圈1
‑
cl11的相反两侧。点胶槽1
‑
1086可配置以设置粘着元件1
‑
ad2,以使第一驱动线圈1
‑
cl11固定于安装结构1
‑
1081上。
[0970]
请同时参考图10,图10为根据本公开一实施例的镜头承载件1
‑
108的立体放大图。第一侧面1
‑
1085上可形成有一第一点胶沟槽1
‑
1087,并且当沿着一第一方向1
‑
d1(x轴)观察时,第一点胶沟槽1
‑
1087重叠于第一驱动线圈1
‑
cl11的至少一部分。其中,第一方向1
‑
d1是垂直于第一侧面1
‑
1085。
[0971]
于此实施例中,安装结构1
‑
1081包含三个安装部1
‑
1088,安装部1
‑
1088可为一凸出结构,沿着第一方向1
‑
d1由第一侧面1
‑
1085凸出。如图10所示,第一点胶沟槽1
‑
1087是连
接于相邻的二安装部1
‑
1088。当沿着第一方向1
‑
d1观察时,第一点胶沟槽1
‑
1087的至少一部分位于相邻的二安装部1
‑
1088之间。
[0972]
请同时参考图11,图11为根据本公开一实施例的镜头承载件1
‑
108于另一视角的立体放大图。连接引线1
‑
cwr的至少一部分是位于第一引线1
‑
wr1与第一活动组件1
‑
ma1的镜头承载件1
‑
108之间。
[0973]
第一引线1
‑
wr1的一第一接触部1
‑
cp1直接接触连接引线1
‑
cwr,并且第一活动组件1
‑
ma1的镜头承载件1
‑
108的一第二接触部1
‑
cp2直接接触连接引线1
‑
cwr。连接引线1
‑
cwr的至少一部分位于第一引线1
‑
wr1与镜头承载件1
‑
108之间,并且第一接触部1
‑
cp1与第二接触部1
‑
cp2的一中心连线1
‑
cnl穿过连接引线1
‑
cwr。
[0974]
如图8与图9所示,第一活动组件1
‑
ma1的镜头承载件1
‑
108还包含一导引结构1
‑
gds1以及一第一角落结构1
‑
1089。当沿着主轴1
‑
ax观察时,导引结构1
‑
gds1位于绕线结构1
‑
1082以及第一角落结构1
‑
1089之间,并且导引结构1
‑
gds1配置以导引连接引线1
‑
cwr朝向第一角落结构1
‑
1089延伸。
[0975]
另外,如图9所示,当沿着垂直于第一侧面1
‑
1085的方向(例如x轴)观察时,第一引线1
‑
wr1以及连接引线1
‑
cwr是位于第一角落结构1
‑
1089的相反两侧。基于上述结构设计,可以增加第一引线1
‑
wr1与连接引线1
‑
cwr设置于镜头承载件1
‑
108上的稳定性。
[0976]
如图7与图8所示,第一活动组件1
‑
ma1的镜头承载件1
‑
108具有第一侧边1
‑
108s1以及一第二侧边1
‑
108s2。第一侧面1
‑
1085位于第一侧边1
‑
108s1,并且第二侧边1
‑
108s2上形成有一导引沟槽1
‑
1091,并且连接引线1
‑
cwr是设置于导引沟槽1
‑
1091。
[0977]
再者,第二侧边1
‑
108s2上更形成有一第二点胶沟槽1
‑
1092,沿着一第二方向1
‑
d2凹陷。第二点胶沟槽1
‑
1092是可容置一粘着元件1
‑
ad3,以使连接引线1
‑
cwr稳固地设置于导引沟槽1
‑
1091。第二方向1
‑
d2是朝向主轴1
‑
ax并且垂直于第二侧边1
‑
108s2。当沿着主轴1
‑
ax观察时,第二点胶沟槽1
‑
1092与主轴1
‑
ax的一连线1
‑
ll不平行于第二方向1
‑
d2。
[0978]
第一活动组件1
‑
ma1的镜头承载件1
‑
108可还包含多个凸出部1
‑
1093,由第二侧边1
‑
108s2沿着y轴凸出,并且导引沟槽1
‑
1091是形成于这些凸出部1
‑
1093以及第二侧边1
‑
108s2之间。当沿着第二方向1
‑
d2观察时,这些凸出部1
‑
1093重叠于连接引线1
‑
cwr的至少一部分。
[0979]
基于上述的结构设计,可以使连接引线1
‑
cwr稳定地设置于导引沟槽1
‑
1091,并且可以避免当镜头承载件1
‑
108运动时,连接引线1
‑
cwr脱离导引沟槽1
‑
1091的问题。
[0980]
请参考图12与图13,图12为根据另一实施例的镜头承载件1
‑
108与第一驱动线圈1
‑
cl11的立体放大图,并且图13为根据另一实施例的镜头承载件1
‑
108与第一驱动线圈1
‑
cl11的侧视图。
[0981]
于此实施例中,第一活动组件1
‑
ma1的镜头承载件1
‑
108也包含一导引结构1
‑
gds2以及第一角落结构1
‑
1089。当沿着主轴1
‑
ax观察时,第一角落结构1
‑
1089是位于绕线结构1
‑
1082以及导引结构1
‑
gds2之间。
[0982]
导引结构1
‑
gds2由镜头承载件1
‑
108的第一侧面1
‑
1085朝向第一角落结构1
‑
1089延伸。导引结构1
‑
gds2连通于容置槽1
‑
1083,并且容置槽1
‑
1083的至少一部分是位于第一角落结构1
‑
1089。导引结构1
‑
gds2配置以导引第一引线1
‑
wr1朝向第一角落结构1
‑
1089延伸。
[0983]
如图13所示,安装结构1
‑
1081与第一驱动线圈1
‑
cl11形成有多个安装槽1
‑
1081g,配置以容置粘着元件1
‑
ad4。当沿着垂直于第一侧面1
‑
1085的第一方向1
‑
d1观察时,安装槽1
‑
1081g的至少一者可具有一梯形结构,以使粘着元件1
‑
ad4可以均匀地分布在安装槽1
‑
1081g中,借以稳固地使第一驱动线圈1
‑
cl11粘着于安装结构1
‑
1081。
[0984]
本公开提供一种光学元件驱动机构1
‑
100,可包含第一驱动组件1
‑
da1以及第二驱动组件1
‑
da2。第二驱动组件1
‑
da2可驱使活动模块1
‑
md相对于基座1
‑
111运动,并且第一驱动组件1
‑
da1可驱使镜头承载件1
‑
108相对于底座1
‑
112运动,借以达成自动对焦以及光学防手震的功能。
[0985]
再者,光学元件驱动机构1
‑
100可包含多个制震元件,设置于镜头承载件1
‑
108以及框架1
‑
104之间,并且这些制震元件是设置在镜头承载件1
‑
108的多个侧边。基于制震元件的配置,可以更有效地抑制镜头承载件1
‑
108的震动,进而增加光学元件驱动机构1
‑
100的稳定度。
[0986]
请参考图14至图16,图14为根据本公开一实施例的光学元件驱动机构2
‑
100的立体图,图15为根据本公开一实施例的光学元件驱动机构2
‑
100的爆炸图,并且图16为根据本公开一实施例的光学元件驱动机构2
‑
100沿图14中2
‑
a
‑2‑
a线段的剖视图。光学元件驱动机构2
‑
100可为一光学摄像模块,配置以承载并驱动一光学元件。光学元件驱动机构2
‑
100是可安装于各种电子装置或可携式电子装置,例如设置于智能手机,以供使用者执行图像提取的功能。于此实施例中,光学元件驱动机构2
‑
100可为具有具备自动对焦(af)功能的音圈马达(vcm),但本公开不以此为限。在其他实施例中,光学元件驱动机构2
‑
100也可具备自动对焦(af)及光学防手震(ois)功能。
[0987]
在本实施例中,光学元件驱动机构2
‑
100可包含一固定模块2
‑
fm、一活动模块2
‑
md以及一驱动模块2
‑
dm。活动模块2
‑
md是活动地连接固定模块2
‑
fm,并且活动模块2
‑
md是配置以承载一光学元件(图中未表示)。驱动模块2
‑
dm是用以驱动活动模块2
‑
md相对固定模块2
‑
fm运动。
[0988]
于此实施例中,如图15所示,固定模块2
‑
fm包含一外壳2
‑
102以及一基座2
‑
111,活动模块2
‑
md包含一镜头承载件2
‑
108以及前述的光学元件,并且镜头承载件2
‑
108是用以承载所述光学元件。镜头承载件2
‑
108与所述光学元件可合称为一第一活动组件2
‑
ma1。
[0989]
如图15所示,前述外壳2
‑
102具有一中空结构,并且其上形成有一外壳开孔2
‑
1021,基座2
‑
111上形成有一基座开孔2
‑
1111,外壳开孔2
‑
1021的中心是对应于光学元件的光轴2
‑
o,并且基座开孔2
‑
1111是对应于设置在基座2
‑
111下方的感光元件(如图中未表示)。外部光线可由外壳开孔2
‑
1021进入外壳2
‑
102且经过光学元件与基座开孔2
‑
1111后由前述感光元件150所接收,以产生一数字图像信号。
[0990]
再者,外壳2
‑
102是设置于基座2
‑
111上,并且可具有一容置空间2
‑
1023,用以容置活动模块2
‑
md(包含前述光学元件、镜头承载件2
‑
108)以及驱动模块2
‑
dm。
[0991]
活动模块2
‑
md可还包含一框架2
‑
104以及一底座2
‑
112,沿着一主轴2
‑
ax排列。主轴2
‑
ax可平行或重叠于光轴2
‑
o。框架2
‑
104是固定地连接于底座2
‑
112,并且底座2
‑
112是通过一第二驱动组件2
‑
da2活动地连接于基座2
‑
111。
[0992]
活动模块2
‑
md可还包含一第一弹性元件2
‑
106以及一第二弹性元件2
‑
110,第一弹性元件2
‑
106的外侧部分(外环部)是固定于框架2
‑
104,第二弹性元件2
‑
110的外侧部分(外
环部)是固定于底座2
‑
112,并且第一弹性元件2
‑
106以及第二弹性元件2
‑
110的内侧部分(内环部)是分别连接于镜头承载件2
‑
108的上下两侧,使得镜头承载件2
‑
108能以悬吊的方式设置于容置空间2
‑
1023内。
[0993]
于此实施例中,驱动模块2
‑
dm可包含一第一驱动组件2
‑
da1以及第二驱动组件2
‑
da2。第一驱动组件2
‑
da1可包含一第一磁性元件2
‑
me11(第一驱动磁铁)、一第二磁性元件2
‑
me12(第二驱动磁铁)、一第一驱动线圈2
‑
cl11以及一第二驱动线圈2
‑
cl12。第一磁性元件2
‑
me11、第二磁性元件2
‑
me12是分别对应于第一驱动线圈2
‑
cl11以及第二驱动线圈2
‑
cl12且设置在框架2
‑
104上。
[0994]
于此实施例中,第一驱动线圈2
‑
cl11与第二驱动线圈2
‑
cl12可为绕线线圈,设置于镜头承载件2
‑
108的相反两侧上。当第一驱动线圈2
‑
cl11以及第二驱动线圈2
‑
cl12通电时,可分别与第一磁性元件2
‑
me11以及第二磁性元件2
‑
me12产生电磁驱动力(electromagnetic force),以驱动镜头承载件2
‑
108以及所承载的光学元件相对于底座2
‑
112沿着光轴2
‑
o的方向(z轴方向)移动。
[0995]
再者,第二驱动组件2
‑
da2是连接于底座2
‑
112与基座2
‑
111之间,并且第二驱动组件2
‑
da2是可驱动活动模块2
‑
md沿着xy平面运动,以达成光学防手震的功效。
[0996]
请参考图17,图17为根据本公开一实施例的第二驱动组件2
‑
da2与基座2
‑
111的俯视图。于此实施例中,如图17所示,第二驱动组件2
‑
da2可包括一第一连接件2
‑
131、一第二连接件2
‑
132、一驱动元件2
‑
133以及一弹性部2
‑
134。第一连接件2
‑
131是固定地连接于底座2
‑
112,第二连接件2
‑
132是固定地连接于基座2
‑
111,并且第二连接件2
‑
132是经由弹性部2
‑
134活动地连接于第一连接件2
‑
131。
[0997]
驱动元件2
‑
133是连接于第一连接件2
‑
131以及基座2
‑
111之间,并且驱动元件2
‑
133可为形状记忆合金(shape memory alloys,sma)制成。形状记忆合金是一种在加热升温后能完全消除其在较低的温度下发生的变形,恢复其变形前原始形状的合金材料。当形状记忆合金在低于相变态温度下,受到一有限度的塑性变形后,可由加热的方式使其恢复到变形前的原始形状。通过控制驱动元件2
‑
133的温度,可以使得活动模块2
‑
md可相对于基座2
‑
111运动。
[0998]
请参考图15、图16、图18以及图19,图18为根据本公开一实施例的光学元件驱动机构2
‑
100的部分结构的俯视图,并且图19为根据本公开一实施例的框架2
‑
104与底座2
‑
112的立体图。于此实施例中,活动模块2
‑
md可相对于外壳2
‑
102运动,并且框架2
‑
104与外壳2
‑
102具有不同的导磁系数。举例来说,外壳2
‑
102的导磁系数是小于框架2
‑
104的导磁系数,因此可避免磁干扰的问题。
[0999]
如图18所示,当沿着主轴2
‑
ax观察时,框架2
‑
104具有一多边形结构并且具有一第一角落2
‑
cr1。举例来说,框架2
‑
104具有矩形结构。再者,光学元件驱动机构2
‑
100可还包含一止挡元件2
‑
105,固定于框架2
‑
104上且位于第一角落2
‑
cr1。于此实施例中,光学元件驱动机构2
‑
100可包含四个止挡元件2
‑
105,分别固定框架2
‑
104的四个角落。
[1000]
框架2
‑
104还包括一顶面2
‑
1041以及由顶面2
‑
1041沿着主轴2
‑
ax延伸的一侧壁2
‑
1043。如图16所示,在主轴2
‑
ax的方向上(例如z轴上),止挡元件2
‑
105与外壳2
‑
102的最短距离2
‑
md1小于框架2
‑
104的顶面2
‑
1041与外壳2
‑
102的最短距离2
‑
md2。止挡元件2
‑
105配置以抵接于外壳2
‑
102的内壁面并限制活动模块2
‑
md的运动范围。
[1001]
如图18所示,在垂直于侧壁2
‑
1043的一第一方向2
‑
d1(x轴)上,止挡元件2
‑
105与外壳2
‑
102的最短距离小于框架2
‑
104的侧壁2
‑
1043与外壳2
‑
102的最短距离。
[1002]
当沿着主轴2
‑
ax观察时,止挡元件2
‑
105重叠于框架2
‑
104的至少一部分。相似地,当沿着第一方向2
‑
d1观察时,止挡元件2
‑
105重叠于框架2
‑
104的至少一部分。于此实施例中,止挡元件2
‑
105可由塑胶材质制成,而框架2
‑
104可由金属材质制成,并且止挡元件2
‑
105可通过胶水固定于框架2
‑
104上。
[1003]
请同时参考图20,图20为根据本公开一实施例的框架2
‑
104与底座2
‑
112的放大图。于此实施例中,底座2
‑
112是固定地连接框架2
‑
104的侧壁2
‑
1043。举例来说,底座2
‑
112可经由焊接的方式固定地连接侧壁2
‑
1043。焊接的方式可为熔接,但不限于此。在其他实施例中,也可利用焊锡来连接底座2
‑
112与侧壁2
‑
1043。
[1004]
于此实施例中,底座2
‑
112可以塑胶材料制成,并且底座内可设置有多个电路构件2
‑
113,并且电路构件2
‑
113是以模塑互联对象(molded interconnect device,mid)的方式形成于底座2
‑
112内。
[1005]
框架2
‑
104可具有一第一连接凸部2
‑
1044,底座2
‑
112具有一第二连接凸部2
‑
1131,并且第一连接凸部2
‑
1044通过焊接的方式固定地连接于第二连接凸部2
‑
1131。举例来说,第一连接凸部2
‑
1044是通过激光焊接的方式固定地连接于第二连接凸部2
‑
1131,但不限于此。
[1006]
请同时参考图20与图21,图21为根据本公开一实施例的框架2
‑
104与底座2
‑
112的俯视图。第二连接凸部2
‑
1131为电路构件2
‑
113的一部分,并且当沿着主轴2
‑
ax观察时,底座2
‑
112或电路构件2
‑
113不凸出于框架2
‑
104。具体而言,当沿着主轴2
‑
ax观察时,第二连接凸部2
‑
1131与侧壁2
‑
1043大致齐平。基于此结构设计,可以避免驱动元件2
‑
133在作动时勾到第二连接凸部2
‑
1131,造成驱动元件2
‑
133的损坏。
[1007]
请同时参考图20与图22,图22为根据本公开一实施例的框架2
‑
104与底座2
‑
112的部分结构的侧视图。当沿着垂直于主轴2
‑
ax的方向(例如第一方向2
‑
d1)观察时,第二连接凸部2
‑
1131与框架2
‑
104的第一连接凸部2
‑
1044的一第一侧面2
‑
1045之间的距离等于零,但不限于此。在其他实施例中,第二连接凸部2
‑
1131与第一侧面2
‑
1045之间的距离也可大于零。
[1008]
第二连接凸部2
‑
1131具有一第二侧面2
‑
1132,第二侧面2
‑
1132不平行于第一侧面2
‑
1045。举例来说,第一侧面2
‑
1045是垂直于第二侧面2
‑
1132。于此实施例中,激光焊接是实施在第一侧面2
‑
1045与第二侧面2
‑
1132的交界处。基于此结构设计,可以增加框架2
‑
104与底座2
‑
112之间的连接强度。
[1009]
请同时参考图23至图25。图23为根据本公开一实施例的第一弹性元件2
‑
106与框架2
‑
104的俯视图,图24为根据本公开一实施例的图23中区域2
‑
x的放大图,并且图25根据本公开一实施例的沿着图24中线段2
‑
b
‑2‑
b的剖面图。于此实施例中,第一活动组件2
‑
ma1的镜头承载件2
‑
108是经由第一弹性元件2
‑
106活动地连接框架2
‑
104。
[1010]
第一弹性元件2
‑
106可包括一第一外框部2
‑
1061、一第一内框部2
‑
1062以及一第一弹性部2
‑
1063。第一外框部2
‑
1061是固定地设置于框架2
‑
104,第一内框部2
‑
1062是固定地设置于第一活动组件2
‑
ma1的镜头承载件2
‑
108,并且第一内框部2
‑
1062是经由第一弹性部2
‑
1063活动地连接于第一外框部2
‑
1061。
[1011]
第一弹性元件2
‑
106是可通过焊接的方式连接于框架2
‑
104,例如通过熔接的方式。举例来说,第一外框部2
‑
1061可通过激光焊接的方式固定地连接于框架2
‑
104。另外,如图23与图16所示,第一弹性元件2
‑
106是设置于框架2
‑
104与止挡元件2
‑
105之间。
[1012]
如图24所示,第一弹性元件2
‑
106具有一第一开口2
‑
1065,并且当沿着主轴2
‑
ax观察时,第一弹性元件2
‑
106与框架2
‑
104之间的一焊接部2
‑
1071重叠于第一开口2
‑
1065的至少一部分。如图23所示,第一开口2
‑
1065位于第一角落2
‑
cr1。
[1013]
于此实施例中,第一弹性元件2
‑
106与框架2
‑
104是以金属材质制成,并且焊接用的激光是实施在焊接部2
‑
1071。由于激光的照射,第一弹性元件2
‑
106与框架2
‑
104会熔解而彼此连接,因此会使得焊接部2
‑
1071产生一凹陷结构2
‑
1072。如图25所示,当沿着垂直于主轴2
‑
ax的一方向观察时,凹陷结构2
‑
1072于主轴2
‑
ax(z轴)上的一深度2
‑
dt1至少为框架2
‑
104于主轴2
‑
ax上的一厚度2
‑
tn1的一半以上。
[1014]
基于上述的设计,可以增加第一弹性元件2
‑
106与框架2
‑
104之间的连接强度,避免当光学元件驱动机构2
‑
100受到冲击时第一弹性元件2
‑
106脱离框架2
‑
104。另外,如图25所示,第一弹性元件2
‑
106上可设置一粘接元件2
‑
ad1,以进一步增加第一弹性元件2
‑
106与框架2
‑
104之间的连接强度。
[1015]
请参考图26,图26为根据本公开一实施例的第一弹性元件2
‑
106以及第二弹性元件2
‑
110的俯视图。第一活动组件2
‑
ma1也是经由第二弹性元件2
‑
110活动地连接框架2
‑
104。第二弹性元件2
‑
110可包括至少一第二外框部2
‑
1101、至少一第二内框部2
‑
1102以及至少一第二弹性部2
‑
1103。
[1016]
第二外框部2
‑
1101是固定地设置于框架2
‑
104,第二内框部2
‑
1102是固定地设置于第一活动组件2
‑
ma1的镜头承载件2
‑
108,并且第二内框部2
‑
1102是经由第二弹性部2
‑
1103活动地连接第二外框部2
‑
1101。如图26所示,第一弹性部2
‑
1063的一部分与第二弹性部2
‑
1103的一部分可具有相同轮廓。
[1017]
当沿着主轴2
‑
ax(z轴)观察时,第一弹性部2
‑
1063包括多个弯折部,并且当沿着主轴2
‑
ax观察时,第二弹性部2
‑
1103包括多个弯折部。具体而言,第一外框部2
‑
1061是依序经由第一弹性部2
‑
1063的一第一弯折部2
‑
t11、一第二弯折部2
‑
t12、
…
以及一第n弯折部2
‑
t1n连接至第一内框部2
‑
1062。
[1018]
第二外框部2
‑
1101是依序经由第二弹性部2
‑
1103的一第一弯折部2
‑
t21、一第二弯折部2
‑
t22、
…
以及一第m弯折部2
‑
t2m连接至第二内框部2
‑
1102。
[1019]
值得注意的是,第一弹性部2
‑
1063的第一弯折部2
‑
t11与第二弹性部2
‑
1103的第一弯折部2
‑
t21的弯折角度相同,并且第一弹性部2
‑
1063的第二弯折部2
‑
t12与第二弹性部2
‑
1103的第二弯折部2
‑
t22的弯折角度相同,以此类推。也就是说,第一弹性部2
‑
1063的第n弯折部2
‑
t1n与第二弹性部2
‑
1103的第m弯折部2
‑
t2m的弯折角度相同。其中,n与m为相等的自然数(不包含0)。基于上述设计,可以增加活动模块2
‑
md运动时的稳定度。
[1020]
请参考图27,图27为根据本公开另一实施例的镜头承载件2
‑
108、第一弹性元件2
‑
106以及第一驱动线圈2
‑
cl11的立体放大图。第一活动组件2
‑
ma1的镜头承载件2
‑
108包含一接触顶面2
‑
1081以及一第一侧面2
‑
1082,并且第一侧面2
‑
1082是由接触顶面2
‑
1081沿着主轴2
‑
ax延伸。
[1021]
接触顶面2
‑
1081形成有一第一容置凹槽2
‑
1083,配置以容置一第一接着元件2
‑
ae1。第一侧面2
‑
1082形成有一第二容置凹槽2
‑
1084,配置以容置一第二接着元件2
‑
ae2。第一弹性元件2
‑
106通过第一接着元件2
‑
ae1固定地连接于第一活动组件2
‑
ma1的镜头承载件2
‑
108。
[1022]
再者,第一驱动线圈2
‑
cl11是通过第二接着元件2
‑
ae2固定地连接于第一活动组件2
‑
ma1的镜头承载件2
‑
108。第二接着元件2
‑
ae2可粘接第一弹性元件2
‑
106以及第一驱动线圈2
‑
cl11。基于上述第一容置凹槽2
‑
1083与第二容置凹槽2
‑
1084的设计,可以使第一弹性元件2
‑
106更稳固地连接于镜头承载件2
‑
108。
[1023]
本公开提供一种光学元件驱动机构2
‑
100,可包含第一驱动组件2
‑
da1以及第二驱动组件2
‑
da2。第二驱动组件2
‑
da2可驱使活动模块2
‑
md相对于基座2
‑
111运动,并且第一驱动组件2
‑
da1可驱使镜头承载件2
‑
108相对于底座2
‑
112运动,借以达成自动对焦以及光学防手震的功能。
[1024]
再者,光学元件驱动机构2
‑
100可包含多个电路构件2
‑
113,设置于底座2
‑
112内并且可利用激光焊接的方式固定地连接于框架2
‑
104,借以增加光学元件驱动机构2
‑
100整体的机械强度。另外,本公开的第一弹性部2
‑
1063中的多个弯折部与第二弹性部2
‑
1103中的多个弯折部具有相同的弯折角度,因此可使得活动模块2
‑
md在运动时更稳定,进而增加光学元件驱动机构2
‑
100的稳定度。
[1025]
请参考图28至图30,图28为根据本公开一实施例的光学元件驱动机构3
‑
100的立体图,图29为根据本公开一实施例的光学元件驱动机构3
‑
100的爆炸图,并且图30为根据本公开一实施例的光学元件驱动机构3
‑
100沿图28中3
‑
a
‑3‑
a线段的剖视图。光学元件驱动机构3
‑
100可为一光学摄像模块,配置以承载并驱动一光学元件。光学元件驱动机构3
‑
100是可安装于各种电子装置或可携式电子装置,例如设置于智能手机,以供使用者执行图像提取的功能。于此实施例中,光学元件驱动机构3
‑
100可为具有具备自动对焦(af)功能的音圈马达(vcm),但本公开不以此为限。在其他实施例中,光学元件驱动机构3
‑
100也可具备自动对焦(af)及光学防手震(ois)功能。
[1026]
在本实施例中,光学元件驱动机构3
‑
100可包含一固定模块3
‑
fm、一活动模块3
‑
md以及一驱动模块3
‑
dm。活动模块3
‑
md是活动地连接固定模块3
‑
fm,并且活动模块3
‑
md是配置以承载一光学元件(图中未表示)。驱动模块3
‑
dm是用以驱动活动模块3
‑
md相对固定模块3
‑
fm运动。
[1027]
于此实施例中,如图29所示,固定模块3
‑
fm包含一外壳3
‑
102以及一基座3
‑
111,活动模块3
‑
md包含一镜头承载件3
‑
108以及前述的光学元件,并且镜头承载件3
‑
108是用以承载所述光学元件。镜头承载件3
‑
108与所述光学元件可合称为一第一活动组件3
‑
ma1。
[1028]
如图29所示,前述外壳3
‑
102具有一中空结构,并且其上形成有一外壳开孔3
‑
1021,基座3
‑
111上形成有一基座开孔3
‑
1111,外壳开孔3
‑
1021的中心是对应于光学元件的光轴3
‑
o,并且基座开孔3
‑
1111是对应于设置在基座3
‑
111下方的感光元件(如图中未表示)。外部光线可由外壳开孔3
‑
1021进入外壳3
‑
102且经过光学元件与基座开孔3
‑
1111后由前述感光元件150所接收,以产生一数字图像信号。
[1029]
再者,外壳3
‑
102是设置于基座3
‑
111上,并且可具有一容置空间3
‑
1023,用以容置活动模块3
‑
md(包含前述光学元件、镜头承载件3
‑
108)以及驱动模块3
‑
dm。
[1030]
活动模块3
‑
md可还包含一框架3
‑
104以及一底座3
‑
112,沿着一主轴3
‑
ax排列。主
轴3
‑
ax可平行或重叠于光轴3
‑
o。框架3
‑
104是固定地连接于底座3
‑
112,并且底座3
‑
112是通过一第二驱动组件3
‑
da2活动地连接于基座3
‑
111。
[1031]
活动模块3
‑
md可还包含一第一弹性元件3
‑
106以及一第二弹性元件3
‑
110,第一弹性元件3
‑
106的外侧部分(外环部)是固定于框架3
‑
104,第二弹性元件3
‑
110的外侧部分(外环部)是固定于底座3
‑
112,并且第一弹性元件3
‑
106以及第二弹性元件3
‑
110的内侧部分(内环部)是分别连接于镜头承载件3
‑
108的上下两侧,使得镜头承载件3
‑
108能以悬吊的方式设置于容置空间3
‑
1023内。
[1032]
于此实施例中,驱动模块3
‑
dm可包含一第一驱动组件3
‑
da1以及第二驱动组件3
‑
da2。第一驱动组件3
‑
da1可包含一第一磁性元件3
‑
me11(第一驱动磁铁)、一第二磁性元件3
‑
me12(第二驱动磁铁)、一第一驱动线圈3
‑
cl11以及一第二驱动线圈3
‑
cl12。第一磁性元件3
‑
me11、第二磁性元件3
‑
me12是分别对应于第一驱动线圈3
‑
cl11以及第二驱动线圈3
‑
cl12且设置在框架3
‑
104上。
[1033]
于此实施例中,第一驱动线圈3
‑
cl11与第二驱动线圈3
‑
cl12可为绕线线圈,设置于镜头承载件3
‑
108的相反两侧上。当第一驱动线圈3
‑
cl11以及第二驱动线圈3
‑
cl12通电时,可分别与第一磁性元件3
‑
me11以及第二磁性元件3
‑
me12产生电磁驱动力(electromagnetic force),以驱动镜头承载件3
‑
108以及所承载的光学元件相对于底座3
‑
112沿着光轴3
‑
o的方向(z轴方向)移动。
[1034]
再者,第二驱动组件3
‑
da2是连接于底座3
‑
112与基座3
‑
111之间,并且第二驱动组件3
‑
da2是可驱动活动模块3
‑
md相对于基座3
‑
111沿着xy平面运动,以达成光学防手震的功效。
[1035]
请参考图31以及图32,图31为根据本公开一实施例的第二驱动组件3
‑
da2与基座3
‑
111的俯视图,并且图32为根据本公开一实施例的第二驱动组件3
‑
da2与基座3
‑
111的立体图。于此实施例中,如图31所示,第二驱动组件3
‑
da2可包括一固定件3
‑
130、一第一连接件3
‑
131、至少一第二连接件3
‑
132、至少一驱动元件3
‑
133、至少一弹性部3
‑
134以及一电路组件3
‑
190。固定件3
‑
130是固定地连接于基座3
‑
111,第一连接件3
‑
131是固定地连接于活动模块3
‑
md的底座3
‑
112,第二连接件3
‑
132是固定地连接于固定件3
‑
130,并且弹性部3
‑
134连接于第一连接件3
‑
131以及第二连接件3
‑
132之间,以使第二连接件3
‑
132是经由弹性部3
‑
134活动地连接于第一连接件3
‑
131。
[1036]
驱动元件3
‑
133是连接于第一连接件3
‑
131以及固定件3
‑
130之间,并且驱动元件3
‑
133可为形状记忆合金(shape memory alloys,sma)制成。形状记忆合金是一种在加热升温后能完全消除其在较低的温度下发生的变形,恢复其变形前原始形状的合金材料。当形状记忆合金在低于相变态温度下,受到一有限度的塑性变形后,可由加热的方式使其恢复到变形前的原始形状。通过控制驱动元件3
‑
133的温度,可以使得活动模块3
‑
md可相对于基座3
‑
111运动。
[1037]
电路组件3
‑
190可为一可挠式电路板,设置于第一连接件3
‑
131以及固定件3
‑
130之间,并且电路组件3
‑
190是配置以电性连接于一外部电路,例如智能手机的主电路板。另外,值得注意的是,第一连接件3
‑
131、第二连接件3
‑
132以及弹性部3
‑
134可一体成形,并且第一连接件3
‑
131是通过弹性部3
‑
134以及第二连接件3
‑
132活动地连接于固定件3
‑
130。
[1038]
请参考图33以及图34,图33为根据本公开一实施例的光学元件驱动机构3
‑
100的
部分结构的立体图,并且图34为根据本公开一实施例的图30的放大图。于此实施例中,如图33所示,固定模块3
‑
fm的外壳3
‑
102形成有一开口3
‑
102h,并且驱动模块3
‑
dm的一部分(电路组件3
‑
190)是由开口3
‑
102h露出。
[1039]
如图30与图34所示,外壳3
‑
102具有一顶壁3
‑
102t以及一第一侧壁3
‑
102s1,第一侧壁3
‑
102s1是由顶壁3
‑
102t沿着主轴3
‑
ax的方向延伸,并且开口3
‑
102h是形成于第一侧壁3
‑
102s1上。
[1040]
当沿着主轴3
‑
ax观察时,第一侧壁3
‑
102s1重叠于第二驱动组件3
‑
da2的一部分。举例来说,第一侧壁3
‑
102s1沿着主轴3
‑
ax的投影是重叠于电路组件3
‑
190,并且电路组件3
‑
190是由开口3
‑
102h凸出于第一侧壁3
‑
102s1。
[1041]
再者,第一侧壁3
‑
102s1上可形成有一第一延伸部3
‑
102et1,并且当沿着主轴3
‑
ax观察时,第一延伸部3
‑
102et1是可完全遮蔽第二驱动组件3
‑
da2。当沿着主轴3
‑
ax观察时,第一延伸部3
‑
102et1的至少一部分不重叠于开口3
‑
102h,举例来说,第一延伸部3
‑
102et1的一部分在主轴3
‑
ax上的投影是不落在于开口3
‑
102h内。
[1042]
当沿着垂直于主轴3
‑
ax的一第一方向3
‑
d1(x轴方向)观察时,第一延伸部3
‑
102et1重叠于开口3
‑
102h的至少一部分。如图34所示,光学元件驱动机构3
‑
100可还包含一第一黏接元件3
‑
ae1,配置以连接于第一延伸部3
‑
102et1以及第二驱动组件3
‑
da2的电路组件3
‑
190。在一些实施例中,第一粘接元件3
‑
ae1可完全封闭第一延伸部3
‑
102et1与电路组件3
‑
190之间的空隙,以避免灰尘经由开口3
‑
102h进入光学元件驱动机构3
‑
100内部而影响光学元件驱动机构3
‑
100拍摄的图像效果。
[1043]
如图34所示,第一延伸部3
‑
102et1具有一第一外侧面3
‑
es1以及一第一内侧面3
‑
is1,而第一侧壁3
‑
102s1具有一第二外侧面3
‑
es2以及一第二内侧面3
‑
is2。当沿着垂直于主轴3
‑
ax的一第二方向3
‑
d2(y轴方向)观察时,第一粘接元件3
‑
ae1的至少一部分在主轴3
‑
ax的方向上不重叠于第一内侧面3
‑
is1。举例来说,第一内侧面3
‑
is1在主轴3
‑
ax上的投影不重叠于第一粘接元件3
‑
ae1的一部分。
[1044]
当沿着第二方向3
‑
d2(y轴方向)观察时,第一粘接元件3
‑
ae1在主轴3
‑
ax的方向上不重叠于第二外侧面3
‑
es2。当沿着第二方向3
‑
d2观察时,第一粘接元件3
‑
ae1在主轴3
‑
ax的方向上不重叠于第二内侧面3
‑
is2。如图34所示,当沿着第二方向3
‑
d2观察时,第一粘接元件3
‑
ae1是位于第一外侧面3
‑
es1以及第二外侧面3
‑
es2之间。
[1045]
基于上述结构设计,可以避免驱动元件3
‑
133变形时接触到第一粘接元件3
‑
ae1而粘着到第一粘接元件3
‑
ae1,进而造成驱动元件3
‑
133损坏的问题。
[1046]
于此实施例中,外壳3
‑
102可具有金属材质,第一内侧面3
‑
is1上可设置有一第一绝缘元件(图中未表示),并且第二内侧面3
‑
is2上也可设置有第一绝缘元件。举例来说,第一绝缘元件可为一绝缘层,并且第一绝缘元件是可设置于外壳3
‑
102的所有内侧面。
[1047]
由于第一绝缘元件可电性绝缘,因此可以避免当驱动元件3
‑
133形变时接触外壳3
‑
102而与外壳3
‑
102导电。另外,第一绝缘元件的硬度是小于外壳3
‑
102的硬度,因此可以避免当驱动元件3
‑
133形变时撞击外壳3
‑
102而造成损坏的问题。
[1048]
另外,光学元件驱动机构3
‑
100可还包含一第二黏接元件3
‑
ae2,设置于固定件3
‑
130以及基座3
‑
111之间,以使固定件3
‑
130固定于基座3
‑
111。固定件3
‑
130具有一第一接触面3
‑
1301以及第二接触面3
‑
1302,并且第二黏接元件3
‑
ae2是设置于第二接触面3
‑
1302以
及基座3
‑
111之间。
[1049]
第一接触面3
‑
1301上设置有一第二绝缘元件(图中未表示),并且第二绝缘元件是位于电路组件3
‑
190以及固定件3
‑
130之间。于此实施例中,固定件3
‑
130具有金属材质,因此第二绝缘元件可避免电路组件3
‑
190与固定件3
‑
130导电。
[1050]
再者,基座3
‑
111也可具有金属材质,而第二粘接元件3
‑
ae2具有塑胶材质。举例来说,第二粘接元件3
‑
ae2可包含塑胶微颗粒,意即第二粘接元件3
‑
ae2也可为一绝缘元件,可使固定件3
‑
130不会与基座3
‑
111导电。
[1051]
请参考图31、图32、图35与图36,图35为根据本公开另一实施例的固定件3
‑
130沿着x轴观察的部分结构的侧视图,并且图36为根据本公开另一实施例的光学元件驱动机构3
‑
100部分结构的剖面图。
[1052]
当沿着主轴3
‑
ax观察时,固定件3
‑
130具有矩形结构,并且固定件3
‑
130具有一第一侧边3
‑
130s1,对应于第一侧壁3
‑
102s1。固定件3
‑
130还具有一阻挡部3
‑
1304,由第一侧边3
‑
130s1延伸并朝向顶壁3
‑
102t弯折。如图35所示,当沿着第一方向3
‑
d1(x轴)观察时,阻挡部3
‑
1304是位于第一侧边3
‑
130s1的中央处,但不限于此。
[1053]
当沿着主轴3
‑
ax观察时,第一内侧面3
‑
is1不重叠于阻挡部3
‑
1304。当沿着主轴3
‑
ax观察时,第二内侧面3
‑
is2重叠于阻挡部3
‑
1304。当沿着第一方向3
‑
d1观察时,第一延伸部3
‑
102et1重叠于阻挡部3
‑
1304的至少一部分。
[1054]
基于阻挡部3
‑
1304的设计,可以进一步避免当驱动元件3
‑
133形变时撞击外壳3
‑
102而造成损坏的问题。
[1055]
请参考图37至图39,图37为根据本公开另一实施例的外壳3
‑
102于另一视角的的立体图,图38为根据本公开另一实施例的外壳3
‑
102、固定件3
‑
130与基座3
‑
111的立体剖面图,并且图39为根据本公开另一实施例的外壳3
‑
102、固定件3
‑
130与基座3
‑
111的沿着y轴观察时的剖面图。
[1056]
如图37至图39所示,于此实施例中,第一延伸部3
‑
102et1上形成有一第二延伸部3
‑
102et2,朝向第一侧边3
‑
130s1延伸。第一延伸部3
‑
102et1可具有板状结构,并且第二延伸部3
‑
102et2可具有条状结构,但不限于此。于此实施例中,第二延伸部3
‑
102et2是由第一延伸部3
‑
102et1的中央处形成。
[1057]
当沿着主轴3
‑
ax观察时,第一内侧面3
‑
is1重叠于第二延伸部3
‑
102et2,并且当沿着主轴3
‑
ax观察时,第二内侧面3
‑
is2重叠于第二延伸部3
‑
102et2。意即,第一内侧面3
‑
is1与第二内侧面3
‑
is2的投影都会重叠于第二延伸部3
‑
102et2
[1058]
再者,当沿着第二方向3
‑
d2(例如y轴方向)观察时,第二延伸部3
‑
102et2重叠于固定件3
‑
130的一部分。基于上述结构设计,不仅可以进一步避免当驱动元件3
‑
133形变时超出开口3
‑
102h的问题,也可以使光学元件驱动机构3
‑
100达成小型化的目的。
[1059]
请参考图40与图41,图40为根据本公开一实施例的电路组件3
‑
190与固定件3
‑
130的俯视图,并且图41为根据本公开一实施例的电路组件3
‑
190与固定件3
‑
130的主视图。
[1060]
电路组件3
‑
190可包含一电路基板3
‑
191、一第一对金属线路、一第二对金属线路、一第三对金属线路以及第四对金属线路。第一对金属线路包含金属线路3
‑
ln11以及金属线路3
‑
ln12,第二对金属线路包含金属线路3
‑
ln21以及金属线路3
‑
ln22,第三对金属线路包含金属线路3
‑
ln31以及金属线路3
‑
ln32,并且第四对金属线路包含金属线路3
‑
ln41以及金
属线路3
‑
ln42。
[1061]
电路基板3
‑
191是设置于固定件3
‑
130上并且具有绝缘材料。举例来说,电路基板3
‑
191上可设置有绝缘层,并且第一对金属线路至第四对金属线路设置于电路基板3
‑
191的绝缘层上。
[1062]
如图41所示,当沿着第一方向3
‑
d1观察时,第一对金属线路至第四对金属线路是沿着第二方向3
‑
d2依序排列。于此实施例中,第二对金属线路与第四对金属线路是用来传输不同的高频信号,而第一对金属线路与第三对金属线路是用来传输不同的非高频信号。意即,用来传输高频信号的金属线路与用来传输非高频信号的金属线路是交错设置。
[1063]
再者,电路组件3
‑
190还包含一接地线3
‑
lg1以及一接地线3
‑
lg2,并且接地线3
‑
lg2是设置于第二对金属线路以及第四对金属线路之间。基于接地线3
‑
lg2将第二对金属线路与第四对金属线路隔开的设计,可以避免高频信号的相互干扰的问题。
[1064]
如图40所示,当沿着主轴3
‑
ax观察时,这些金属线路中的每一者为一完整的连续线段。具体而言,每一金属线路的两个电性连接端之间不会设置贯孔(via)。
[1065]
另外,如图40所示,当沿着主轴3
‑
ax观察时,第三对金属线路的其中一者(金属线路3
‑
ln31)垂直于固定件3
‑
130的第一侧边3
‑
130s1,并且电路基板3
‑
191上更设置有一强化部3
‑
193,电性连接于第三对金属线路的金属线路3
‑
ln31,并且强化部3
‑
193是电性独立于金属线路3
‑
ln31以外的其他金属线路。
[1066]
由于电路基板3
‑
191为一可挠式基板,因此设置强化部3
‑
193可以增加电路组件3
‑
190的整体的结构强度。强化部3
‑
193的设置位置与数量不限于此实施例。
[1067]
本公开提供一种光学元件驱动机构3
‑
100,其中外壳3
‑
102上可具有开口3
‑
102h,使电路组件3
‑
190的一部分可以由开口3
‑
102h露出,以使光学元件驱动机构3
‑
100可以快速且简易地安装于一外部电子装置上。外壳3
‑
102上可形成第一延伸部3
‑
102et1,并且第一粘接元件3
‑
ae1可连接于第一延伸部3
‑
102et1以及第二驱动组件3
‑
da2的电路组件3
‑
190,以避免灰尘经由开口3
‑
102h进入光学元件驱动机构3
‑
100内部。
[1068]
再者,本公开的电路组件3
‑
190上可形成有一接地线,设置于高频信号线路与非高频信号线路之间,因此可避免高频信号的相互干扰的问题。
[1069]
请参考图42至图44,图42为根据本公开一实施例的光学元件驱动机构4
‑
100的立体图,图43为根据本公开一实施例的光学元件驱动机构4
‑
100的爆炸图,并且图44为根据本公开一实施例的光学元件驱动机构4
‑
100沿图42中4
‑
a
‑4‑
a线段的剖视图。光学元件驱动机构4
‑
100可为一光学摄像模块,配置以承载并驱动一光学元件。光学元件驱动机构4
‑
100是可安装于各种电子装置或可携式电子装置,例如设置于智能手机,以供使用者执行图像提取的功能。于此实施例中,光学元件驱动机构4
‑
100可为具有具备自动对焦(af)功能的音圈马达(vcm),但本公开不以此为限。在其他实施例中,光学元件驱动机构4
‑
100也可具备自动对焦(af)及光学防手震(ois)功能。
[1070]
在本实施例中,光学元件驱动机构4
‑
100可包含一固定模块4
‑
fm、一活动模块4
‑
md以及一驱动模块4
‑
dm。活动模块4
‑
md是活动地连接固定模块4
‑
fm,并且活动模块4
‑
md是配置以承载一光学元件(图中未表示)。驱动模块4
‑
dm是用以驱动活动模块4
‑
md相对固定模块4
‑
fm运动。
[1071]
于此实施例中,如图43所示,固定模块4
‑
fm包含一外壳4
‑
102以及一基座4
‑
111,活
动模块4
‑
md包含一镜头承载件4
‑
108以及前述的光学元件,并且镜头承载件4
‑
108是用以承载所述光学元件。镜头承载件4
‑
108与所述光学元件可合称为一第一活动组件4
‑
ma1。
[1072]
如图43所示,前述外壳4
‑
102具有一中空结构,并且其上形成有一外壳开孔4
‑
1021,基座4
‑
111上形成有一基座开孔4
‑
1111,外壳开孔4
‑
1021的中心是对应于光学元件的光轴4
‑
o,并且基座开孔4
‑
1111是对应于设置在基座4
‑
111下方的感光元件(如图中未表示)。外部光线可由外壳开孔4
‑
1021进入外壳4
‑
102且经过光学元件与基座开孔4
‑
1111后由前述感光元件150所接收,以产生一数字图像信号。
[1073]
再者,外壳4
‑
102是设置于基座4
‑
111上,并且可具有一容置空间4
‑
1023,用以容置活动模块4
‑
md(包含前述光学元件、镜头承载件4
‑
108)以及驱动模块4
‑
dm。
[1074]
活动模块4
‑
md可还包含一框架4
‑
104以及一底座4
‑
112,沿着一主轴4
‑
ax排列。主轴4
‑
ax可平行或重叠于光轴4
‑
o。框架4
‑
104是固定地连接于底座4
‑
112,并且底座4
‑
112是通过一第二驱动组件4
‑
da2活动地连接于基座4
‑
111。
[1075]
活动模块4
‑
md可还包含一第一弹性元件4
‑
106以及一第二弹性元件4
‑
110,第一弹性元件4
‑
106的外侧部分(外环部)是固定于框架4
‑
104,第二弹性元件4
‑
110的外侧部分(外环部)是固定于底座4
‑
112,并且第一弹性元件4
‑
106以及第二弹性元件4
‑
110的内侧部分(内环部)是分别连接于镜头承载件4
‑
108的上下两侧,使得镜头承载件4
‑
108能以悬吊的方式设置于容置空间4
‑
1023内。
[1076]
于此实施例中,驱动模块4
‑
dm可包含一第一驱动组件4
‑
da1以及第二驱动组件4
‑
da2。第一驱动组件4
‑
da1可包含一第一磁性元件4
‑
me11(第一驱动磁铁)、一第二磁性元件4
‑
me12(第二驱动磁铁)、一第一驱动线圈4
‑
cl11以及一第二驱动线圈4
‑
cl12。第一磁性元件4
‑
me11、第二磁性元件4
‑
me12是分别对应于第一驱动线圈4
‑
cl11以及第二驱动线圈4
‑
cl12且设置在框架4
‑
104上。
[1077]
于此实施例中,第一驱动线圈4
‑
cl11与第二驱动线圈4
‑
cl12可为绕线线圈,设置于镜头承载件4
‑
108的相反两侧上。当第一驱动线圈4
‑
cl11以及第二驱动线圈4
‑
cl12通电时,可分别与第一磁性元件4
‑
me11以及第二磁性元件4
‑
me12产生电磁驱动力(electromagnetic force),以驱动镜头承载件4
‑
108以及所承载的光学元件相对于底座4
‑
112沿着光轴4
‑
o的方向(z轴方向)移动。
[1078]
再者,第二驱动组件4
‑
da2是连接于底座4
‑
112与基座4
‑
111之间,并且第二驱动组件4
‑
da2是可驱动活动模块4
‑
md相对于基座4
‑
111沿着xy平面运动,以达成光学防手震的功效。
[1079]
请参考图45以及图46,图45为根据本公开一实施例的第二驱动组件4
‑
da2与基座4
‑
111的俯视图,并且图46为根据本公开一实施例的第二驱动组件4
‑
da2与基座4
‑
111的立体图。于此实施例中,如图45所示,第二驱动组件4
‑
da2可包括一固定件4
‑
130、一第一连接件4
‑
131、至少一第二连接件4
‑
132、至少一驱动元件4
‑
133、至少一弹性部4
‑
134以及一电路组件4
‑
190。固定件4
‑
130是固定地连接于基座4
‑
111,第一连接件4
‑
131是固定地连接于活动模块4
‑
md的底座4
‑
112,第二连接件4
‑
132是固定地连接于固定件4
‑
130,并且弹性部4
‑
134连接于第一连接件4
‑
131以及第二连接件4
‑
132之间,以使第二连接件4
‑
132是经由弹性部4
‑
134活动地连接于第一连接件4
‑
131。
[1080]
驱动元件4
‑
133是连接于第一连接件4
‑
131以及固定件4
‑
130之间,并且驱动元件
4
‑
133可为形状记忆合金(shape memory alloys,sma)制成。形状记忆合金是一种在加热升温后能完全消除其在较低的温度下发生的变形,恢复其变形前原始形状的合金材料。当形状记忆合金在低于相变态温度下,受到一有限度的塑性变形后,可由加热的方式使其恢复到变形前的原始形状。通过控制驱动元件4
‑
133的温度,可以使得活动模块4
‑
md可相对于基座4
‑
111运动。
[1081]
电路组件4
‑
190可为一可挠式电路板,设置于第一连接件4
‑
131以及固定件4
‑
130之间,并且电路组件4
‑
190是配置以电性连接于一外部电路,例如智能手机的主电路板。另外,值得注意的是,第一连接件4
‑
131、第二连接件4
‑
132以及弹性部4
‑
134可一体成形,并且第一连接件4
‑
131是通过弹性部4
‑
134以及第二连接件4
‑
132活动地连接于固定件4
‑
130。
[1082]
请参考图47以及图48,图47为根据本公开一实施例的光学元件驱动机构4
‑
100的部分结构的立体图,并且图48为根据本公开一实施例的图44的放大图。于此实施例中,如图47所示,固定模块4
‑
fm的外壳4
‑
102形成有一开口4
‑
102h,并且驱动模块4
‑
dm的一部分(电路组件4
‑
190)是由开口4
‑
102h露出。
[1083]
如图44与图48所示,外壳4
‑
102具有一顶壁4
‑
102t以及一第一侧壁4
‑
102s1,第一侧壁4
‑
102s1是由顶壁4
‑
102t沿着主轴4
‑
ax的方向延伸,并且开口4
‑
102h是形成于第一侧壁4
‑
102s1上。
[1084]
当沿着主轴4
‑
ax观察时,第一侧壁4
‑
102s1重叠于第二驱动组件4
‑
da2的一部分。举例来说,第一侧壁4
‑
102s1沿着主轴4
‑
ax的投影是重叠于电路组件4
‑
190,并且电路组件4
‑
190是由开口4
‑
102h凸出于第一侧壁4
‑
102s1。
[1085]
再者,第一侧壁4
‑
102s1上可形成有一第一延伸部4
‑
102et1,并且当沿着主轴4
‑
ax观察时,第一延伸部4
‑
102et1是可完全遮蔽第二驱动组件4
‑
da2。当沿着主轴4
‑
ax观察时,第一延伸部4
‑
102et1的至少一部分不重叠于开口4
‑
102h,举例来说,第一延伸部4
‑
102et1的一部分在主轴4
‑
ax上的投影是不落在于开口4
‑
102h内。
[1086]
当沿着垂直于主轴4
‑
ax的一第一方向4
‑
d1(x轴方向)观察时,第一延伸部4
‑
102et1重叠于开口4
‑
102h的至少一部分。如图48所示,光学元件驱动机构4
‑
100可还包含一第一黏接元件4
‑
ae1,配置以连接于第一延伸部4
‑
102et1以及第二驱动组件4
‑
da2的电路组件4
‑
190。在一些实施例中,第一粘接元件4
‑
ae1可完全封闭第一延伸部4
‑
102et1与电路组件4
‑
190之间的空隙,以避免灰尘经由开口4
‑
102h进入光学元件驱动机构4
‑
100内部而影响光学元件驱动机构4
‑
100拍摄的图像效果。
[1087]
请参考图46与图49,图49为根据本公开一实施例的第二驱动组件4
‑
da2的部分结构的放大图。于此实施例中,第二驱动组件4
‑
da2可还包含一第一弯折件4
‑
141、一第二弯折件4
‑
142、一第一夹持件4
‑
1311以及一第二夹持件4
‑
1312。第一弯折件4
‑
141是可电性连接于弹性部4
‑
134,并且第二弯折件4
‑
142是可电性连接于电路组件4
‑
190。
[1088]
第一夹持件4
‑
1311是设置于第一连接件4
‑
131上并且配置以通过第一弯折件4
‑
141夹持驱动元件4
‑
133的一第一端。于此实施例中,第一夹持件4
‑
1311与第一连接件4
‑
131是一体成形。第二夹持件4
‑
1312是设置于固定件4
‑
130上并且配置以通过第二弯折件4
‑
142夹持驱动元件4
‑
133的一第二端。
[1089]
于此实施例中,第二夹持件4
‑
1312与固定件4
‑
130是一体成形。另外,于此实施例中,第一弯折件4
‑
141可与弹性部4
‑
134一体成形,但不限于此。
[1090]
如图49所示,第一弯折件4
‑
141可包含一第一弯折部4
‑
1411、一第二弯折部4
‑
1412以及一第三弯折部4
‑
1413,并且光学元件驱动机构4
‑
100可还包含一第一稳定元件4
‑
sg1,设置于第一弯折部4
‑
1411、第二弯折部4
‑
1412以及第三弯折部4
‑
1413之间。
[1091]
第一稳定元件4
‑
sg1是配置以连接驱动元件4
‑
133的所述第一端以及第一弯折件4
‑
141。于此实施例中,第一稳定元件4
‑
sg1可为凝胶,配置以降低驱动元件4
‑
133形变时的晃动程度。
[1092]
如图49所示,驱动元件4
‑
133与第一稳定元件4
‑
sg1形成有一第一交界部4
‑
1331以及一第二交界部4
‑
1332。第一交界部4
‑
1331与第一弯折件4
‑
141于主轴4
‑
ax(z轴)上的距离是小于第二交界部4
‑
1332与第一弯折件4
‑
141于主轴4
‑
ax上的距离。再者,当沿着垂直于主轴4
‑
ax的一方向(例如第一方向4
‑
d1)观察时,第一弯折部4
‑
1411、第二弯折部4
‑
1412以及第三弯折部4
‑
1413形成一渐缩结构。
[1093]
于此实施例中,第一弯折部4
‑
1411不平行于第二弯折部4
‑
1412,第二弯折部4
‑
1412不平行于第三弯折部4
‑
1413,并且第三弯折部4
‑
1413不平行于第一弯折部4
‑
1411。当沿着垂直于主轴4
‑
ax的一方向(第一方向4
‑
d1)观察时,第一弯折部4
‑
1411以及第三弯折部4
‑
1413形成一锐角。
[1094]
再者,第一弯折件4
‑
141可还包含一第一连接部4
‑
1414以及一第二连接部4
‑
1415。第一弯折部4
‑
1411经由第一连接部4
‑
1414连接于第二弯折部4
‑
1412,并且第二弯折部4
‑
1412经由第二连接部4
‑
1415连接于第三弯折部4
‑
1413。
[1095]
第一弯折部4
‑
1411、第二弯折部4
‑
1412以及第三弯折部4
‑
1413的每一者内部设置有一强化层,强化层例如可为一金属层,而第一连接部4
‑
1414以及第二连接部4
‑
1415内没有设置任何强化层。因此,第一连接部4
‑
1414与第二连接部4
‑
1415可被弯折,以使第一弯折部4
‑
1411、第二弯折部4
‑
1412以及第三弯折部4
‑
1413形成上述的渐缩结构。
[1096]
请参考图45、图49与图50,图50为根据本公开一实施例的第二驱动组件4
‑
da2的部分结构的俯视图。本公开的第二驱动组件4
‑
da2可还包含一第三夹持件4
‑
1313,设置于第一连接件4
‑
131上。当沿着主轴4
‑
ax观察时,第一连接件4
‑
131具有多边形结构(例如矩形结构),并且第一夹持件4
‑
1311与第三夹持件4
‑
1313是位于第一连接件4
‑
131的一角落。
[1097]
第一连接件4
‑
131上形成有一定位孔4
‑
131h,并且当沿着主轴4
‑
ax(z轴)观察时,定位孔4
‑
131h位于第一夹持件4
‑
1311以及第三夹持件4
‑
1313之间。另外,第一连接件4
‑
131可具有一上表面4
‑
131s,并且定位孔4
‑
131h是由上表面4
‑
131s形成,并且第一弯折件4
‑
141会抵接于上表面4
‑
131s。
[1098]
请同时参考图51以及图52,图51为根据本公开一实施例的第二驱动组件4
‑
da2的部分结构俯视图,并且图52为根据本公开一实施例的第二驱动组件4
‑
da2的主视图。如图51所示,于此实施例中,第二驱动组件4
‑
da2可还包含多个第一支撑元件4
‑
181,设置于第一连接件4
‑
131以及固定件4
‑
130之间。
[1099]
这些第一支撑元件4
‑
181是固定于固定件4
‑
130上。这些第一支撑元件4
‑
181是配置以支撑第一连接件4
‑
131,以使第一连接件4
‑
131可相对于固定件4
‑
130运动。值得注意的是,这些第一支撑元件4
‑
181没有固定于第一连接件4
‑
131。
[1100]
当沿着主轴4
‑
ax观察时,固定件4
‑
130可具有多边形结构,例如矩形结构。如图51所示,四个第一支撑元件4
‑
181可分别对应于固定件4
‑
130的四个角落。固定件4
‑
130具有一
中央开口4
‑
130h,并且这些第一支撑元件4
‑
181是环绕中央开口4
‑
130h。
[1101]
请参考图53,图53为根据本公开一实施例的第一连接件4
‑
131、第一支撑元件4
‑
181与固定件4
‑
130的部分结构的主视图。于此实施例中,光学元件驱动机构4
‑
100可定义有一光入射端以及一光出射端,光入射端例如可为外壳开孔4
‑
1021,并且光出射端例如可为基座开孔4
‑
1111。
[1102]
如图53所示,这些第一支撑元件4
‑
181的每一者具有一支撑面4
‑
1811,配置以抵接第一连接件4
‑
131。当沿着垂直于主轴4
‑
ax的一方向(例如y轴)观察时,这些第一支撑元件4
‑
181的相邻二者的二支撑面4
‑
1811面朝光入射端,但不限于此。
[1103]
请参考图54,图54为根据本公开另一实施例的第一连接件4
‑
131、第一支撑元件4
‑
181与固定件4
‑
130的部分结构的主视图。于此实施例中,二支撑面4
‑
1811可不面朝所述光入射端。另外,在其他实施例中,支撑面4
‑
1811可完全抵接于第一连接件4
‑
131的底面,并且支撑面4
‑
1811垂直于主轴4
‑
ax。
[1104]
请回到图51。第二驱动组件4
‑
da2可还包含多个第二支撑元件4
‑
182,设置于第一连接件4
‑
131以及固定件4
‑
130之间。这些第二支撑元件4
‑
182固定于固定件4
‑
130上。这些第二支撑元件4
‑
182配置以支撑第一连接件4
‑
131,以使第一连接件4
‑
131可相对于固定件4
‑
130运动。
[1105]
当沿着主轴4
‑
ax观察时,这些第二支撑元件4
‑
182的至少一者与主轴4
‑
ax的距离大于这些第一支撑元件4
‑
181中任一者与主轴4
‑
ax的距离。基于此设计,可以使第一连接件4
‑
131在移动时不会与固定件4
‑
130接触。
[1106]
于此实施例中,这些第一支撑元件4
‑
181以及这些第二支撑元件4
‑
182包含塑胶材质。举例来说,第一支撑元件4
‑
181与第二支撑元件4
‑
182可由塑钢制成。
[1107]
请同时参考图55,图55为根据本公开一实施例的底座4
‑
112、第二驱动组件4
‑
da2与基座4
‑
111由底部观察的立体图。于此实施例中,光学元件驱动机构4
‑
100可还包含至少一电路构件4
‑
180。
[1108]
电路构件4
‑
180是设置于底座4
‑
112内,并且电路构件4
‑
180的一外露部4
‑
180e露出于底座4
‑
112。第一连接件4
‑
131包含有一第一开孔4
‑
131t,对应于外露部4
‑
180e。于此实施例中,第一连接件4
‑
131通过激光焊接固定于外露部4
‑
180e。
[1109]
当沿着主轴4
‑
ax观察时,一焊接部4
‑
sdp形成于第一连接件4
‑
131与外露部4
‑
180e,并且焊接部4
‑
sdp重叠于第一开孔4
‑
131t的至少一部分。另外,当沿着主轴4
‑
ax观察时,基座4
‑
111以及固定件4
‑
130不重叠于第一开孔4
‑
131t。基于上述的结构设计,可以确保进行激光焊接时,基座4
‑
111以及固定件4
‑
130不会被激光照射到。
[1110]
本公开提供一种光学元件驱动机构4
‑
100,其中第二驱动组件4
‑
da2可具有第一弯折件4
‑
141与第一夹持件4
‑
1311。第一夹持件4
‑
1311是配置以通过第一弯折件4
‑
141以及第一稳定元件4
‑
sg1来夹持驱动元件4
‑
133,并且第一弯折件4
‑
141可具有渐缩结构。基于此设计,可以避免驱动元件4
‑
133形变时与第一弯折件4
‑
141碰撞而造成损坏的问题。
[1111]
再者,电路构件4
‑
180可设置于底座4
‑
112内,第一连接件4
‑
131的第一开孔4
‑
131t对应于电路构件4
‑
180的外露部4
‑
180e,并且第一连接件4
‑
131通过激光焊接固定于外露部4
‑
180e,借以增加底座4
‑
112与第一连接件4
‑
131之间的连结强度。
[1112]
请参考图56至图58,图56为根据本公开一实施例的光学元件驱动机构5
‑
100的俯
视图,图57为根据本公开一实施例的光学元件驱动机构5
‑
100的爆炸图,并且图58为根据本公开一实施例的光学元件驱动机构5
‑
100沿图56中5
‑
a
‑5‑
a线段的剖视图。光学元件驱动机构5
‑
100可为一光学摄像模块,配置以承载并驱动一光学元件。光学元件驱动机构5
‑
100是可安装于各种电子装置或可携式电子装置,例如设置于智能手机,以供使用者执行图像提取的功能。于此实施例中,光学元件驱动机构5
‑
100可为具有具备自动对焦(af)功能的音圈马达(vcm),但本公开不以此为限。在其他实施例中,光学元件驱动机构5
‑
100也可具备自动对焦(af)及光学防手震(ois)功能。
[1113]
在本实施例中,光学元件驱动机构5
‑
100可包含一固定组件5
‑
fa、一活动组件5
‑
ma以及一驱动组件5
‑
da。活动组件5
‑
ma是活动地连接固定组件5
‑
fa,并且活动组件5
‑
ma是配置以承载光学元件(图中未表示)。驱动组件5
‑
da是用以驱动活动组件5
‑
ma相对固定组件5
‑
fa运动。
[1114]
于此实施例中,如图57所示,固定组件5
‑
fa包含一外壳5
‑
102、一框架5
‑
104以及一底座5
‑
112,活动组件5
‑
ma包含一镜头承载件5
‑
108以及前述的光学元件,并且镜头承载件5
‑
108是用以承载光学元件。
[1115]
如图57所示,前述外壳5
‑
102具有一中空结构,并且其上形成有一外壳开孔5
‑
1021,底座5
‑
112上形成有一底座开孔5
‑
1121,外壳开孔5
‑
1021的中心是对应于光学元件的光轴5
‑
o,并且底座开孔5
‑
1121是对应于设置在底座5
‑
112下方的感光元件。外部光线可由外壳开孔5
‑
1021进入外壳5
‑
102且经过光学元件与底座开孔5
‑
1121后由前述感光元件所接收,以产生一数字图像信号。
[1116]
再者,外壳5
‑
102是设置于底座5
‑
112上,并且可具有一容置空间5
‑
1023,用以容置活动组件5
‑
ma(包含前述光学元件、镜头承载件5
‑
108)以及驱动组件5
‑
da。
[1117]
活动组件5
‑
ma可还包含一第一弹性元件5
‑
106以及一第二弹性元件5
‑
110,第一弹性元件5
‑
106的外侧部分(外环部)是固定于底座5
‑
112,第二弹性元件5
‑
110的外侧部分(外环部)是固定于外壳5
‑
102的内壁面,并且第一弹性元件5
‑
106以及第二弹性元件5
‑
110的内侧部分(内环部)是分别连接于镜头承载件5
‑
108的上下两侧,使得镜头承载件5
‑
108能以悬吊的方式设置于容置空间5
‑
1023内。
[1118]
于此实施例中,驱动组件5
‑
da可包含一第一磁铁5
‑
m11(第一磁性元件)、一第二磁铁5
‑
m12、一第一线圈5
‑
cl11以及一第二线圈5
‑
cl12。第一线圈5
‑
cl11以及第二线圈5
‑
cl12是设置于镜头承载件5
‑
108上,并且第一磁铁5
‑
m11、第二磁铁5
‑
m12是分别对应于第一线圈5
‑
cl11以及第二线圈5
‑
cl12且设置在框架5
‑
104上。
[1119]
于此实施例中,第一线圈5
‑
cl11与第二线圈5
‑
cl12可为绕线线圈,设置于镜头承载件5
‑
108的相反两侧上。当第一线圈5
‑
cl11以及第二线圈5
‑
cl12通电时,可分别与第一磁铁5
‑
m11以及第二磁铁5
‑
m12产生电磁驱动力(electromagnetic force),以驱动镜头承载件5
‑
108以及所承载的光学元件相对于底座5
‑
112沿着光轴5
‑
o的方向(z轴方向)移动。
[1120]
请参考图56、图57与图59,图59为根据本公开一实施例的底座5
‑
112与一电路元件5
‑
120的立体图。于此实施例中,外壳5
‑
102以及底座5
‑
112是沿着一主轴5
‑
ax排列。如图56所示,当沿着主轴5
‑
ax观察时,固定组件5
‑
fa具有多边形结构,例如矩形结构。再者,如图57与图59所示,底座5
‑
112具有板状结构,并且底座5
‑
112与主轴5
‑
ax垂直。
[1121]
光学元件驱动机构5
‑
100还包括电路组件5
‑
120,电性连接驱动组件5
‑
da,并且电
路组件5
‑
120包括一电路元件5
‑
1201、一位置感测元件5
‑
1203、一控制元件5
‑
1204以及至少一被动元件5
‑
1205。
[1122]
电路元件5
‑
1201为一电路板,例如可挠式电路板,但不限于此,并且电路元件5
‑
1201是电性连接驱动组件5
‑
da。位置感测元件5
‑
1203是用以感测活动组件5
‑
ma的镜头承载件5
‑
108相对固定组件5
‑
fa的运动。控制元件5
‑
1204是用以输出一驱动信号至驱动组件5
‑
da,以驱动镜头承载件5
‑
108。被动元件5
‑
1205具有滤波功能,例如为一电容或一电感,电性连接电路元件5
‑
1201。
[1123]
控制元件5
‑
1204是根据位置感测元件5
‑
1203所输出的一感测信号而输出前述驱动信号。值得注意的是,位置感测元件5
‑
1203与控制元件5
‑
1204是位于同一封装中。具体而言,位置感测元件5
‑
1203与控制元件5
‑
1204是被同一个封装元件5
‑
1200所包覆,封装元件例如可为环氧树脂。
[1124]
如图59所示,固定组件5
‑
fa可还包括一结构强化组件5
‑
113,用以强化固定组件5
‑
fa的机械结构。具体而言,结构强化组件5
‑
113是固定地设置于底座5
‑
112,并且结构强化组件5
‑
113可包括一第一强化元件5
‑
1131以及一第一容纳空间5
‑
as1。
[1125]
第一强化元件5
‑
1131例如可为突出结构,是由底座5
‑
112向外突出,并且第一容纳空间5
‑
as1是位于第一强化元件5
‑
1131并用以容纳电路组件5
‑
120的至少一部分。具体而言,位置感测元件5
‑
1203位于第一容纳空间5
‑
as1,被动元件5
‑
1205位于第一容纳空间5
‑
as1,并且控制元件5
‑
1204位于第一容纳空间5
‑
as1。
[1126]
具体而言,第一强化元件5
‑
1131是沿着主轴5
‑
ax(z轴)延伸,并且当沿着主轴5
‑
ax观察时,第一强化元件5
‑
1131是位于固定组件5
‑
fa的底座5
‑
112之一第一侧边5
‑
112s1,并且第一侧边5
‑
112s1沿着一第一方向5
‑
d1(x轴)延伸。而第一容纳空间5
‑
as1是一开口结构,贯穿第一强化元件5
‑
1131。
[1127]
当沿着一第二方向5
‑
d2(y轴)观察时,第一强化元件5
‑
1131是封闭地围绕第一容纳空间5
‑
as1。其中,第二方向5
‑
d2与第一方向5
‑
d1不平行。具体而言,第二方向5
‑
d2与第一方向5
‑
d1垂直。当沿着主轴5
‑
ax观察时,第一容纳空间5
‑
as1重叠于第一强化元件5
‑
1131的至少一部分。
[1128]
请参考图60,图60为根据本公开一实施例的底座5
‑
112与电路元件120于另一视角的立体图。于此实施例中,第一强化元件5
‑
1131包含一第一连接结构5
‑
1133,对应电路组件5
‑
120,用以提升电路组件5
‑
120与第一强化元件5
‑
1131之间的连接强度。
[1129]
电路组件5
‑
120是经由一第一接着元件5
‑
ad1固定地连接第一强化元件5
‑
1131。第一连接结构5
‑
1133具有一第一沟槽5
‑
tr,第一连接结构5
‑
1133具有一第二沟槽5
‑
tr2,第一沟槽5
‑
tr的延伸方向与主轴5
‑
ax平行,并且第一沟槽5
‑
tr与第二沟槽5
‑
tr2的延伸方向相同。
[1130]
相似地,如图59所示,结构强化组件5
‑
113还包含一第二强化元件5
‑
1132,由底座5
‑
112向外突出。第二强化元件5
‑
1132是沿着主轴5
‑
ax延伸。当沿着主轴5
‑
ax观察时,第二强化元件5
‑
1132位于固定组件5
‑
fa的底座5
‑
112的一第二侧边5
‑
112s2,并且第二侧边5
‑
112s2沿着一第三方向5
‑
d3延伸。其中,第三方向5
‑
d3与第一方向5
‑
d1平行。
[1131]
第二强化元件5
‑
1132包含一第二连接结构5
‑
1134,对应外壳5
‑
102的一第一侧壁5
‑
102s1,用以提升第一侧壁5
‑
102s1与第二强化元件5
‑
1132之间的连接强度。举例来说,第
一侧壁5
‑
102s1是经由一第二接着元件5
‑
ad2固定地连接第二强化元件5
‑
1132。
[1132]
第二连接结构5
‑
1134具有至少一第三沟槽5
‑
tr3,第二连接结构5
‑
1134具有至少一第四沟槽5
‑
tr4,第三沟槽5
‑
tr3的延伸方向与主轴5
‑
ax平行,并且第三沟槽5
‑
tr3与第四沟槽5
‑
tr4的延伸方向相同。
[1133]
请参考图57、图60与图61,图61为根据本公开一实施例的光学元件驱动机构5
‑
100的部分结构的的俯视图。结构强化组件5
‑
113还包括一第一止动部5
‑
1135,位于第一强化元件5
‑
1131并对应活动组件5
‑
ma的镜头承载件5
‑
108的一第一止动元件5
‑
1081。第一止动部5
‑
1135与第一止动元件5
‑
1081是用以限制活动组件5
‑
ma的镜头承载件5
‑
108相对固定组件5
‑
fa的底座5
‑
112于一运动范围内运动。
[1134]
具体而言,第一止动部5
‑
1135与第一止动元件5
‑
1081是用以限制活动组件5
‑
ma的镜头承载件5
‑
108相对固定组件5
‑
fa的底座5
‑
112绕主轴5
‑
ax的运动范围,例如可限制镜头承载件5
‑
108相对于底座5
‑
112绕主轴5
‑
ax的旋转角度,以避免镜头承载件5
‑
108与其他元件碰撞造成损坏。另外,镜头承载件5
‑
108沿着x轴及/或y轴的运动也包含在前述的运动范围内。
[1135]
于此实施例中,第一止动部5
‑
1135是由第一强化元件5
‑
1131形成的一凹陷结构,并且第一止动元件5
‑
1081具有一突出结构,由活动组件5
‑
ma的一本体5
‑
1080突出。具体而言,第一止动元件5
‑
1081为一凸柱,并且第一止动元件5
‑
1081是沿着第二方向5
‑
d2突出。
[1136]
请参考图61与图62,图62为根据本公开一实施例的镜头承载件5
‑
108的部分结构的剖面侧视图。如图62所示,第一止动元件5
‑
1081包括一突块5
‑
1083,位于第一止动元件5
‑
1081的一第一表面5
‑
108s1以及一第二表面5
‑
108s2之间。
[1137]
当活动组件5
‑
ma的镜头承载件5
‑
108位于前述运动范围内的任意位置时,突块5
‑
1083不接触固定组件5
‑
fa,例如底座5
‑
112,并且突块5
‑
1083也不接触第一强化元件5
‑
1131。基于上述结构设计,可以避免突块5
‑
1083碰撞其他元件而产生颗粒的问题。
[1138]
另外,当活动组件5
‑
ma的镜头承载件5
‑
108位于前述运动范围内的任意位置时,第一止动元件5
‑
1081也不会与电路组件5
‑
120接触。基于上述结构设计,可以避免电路组件5
‑
120被第一止动元件5
‑
1081碰撞而造成损坏的问题。
[1139]
如图62所示,第一表面5
‑
108s1与第二表面5
‑
108s2不平行。具体而言,第一表面5
‑
108s1与第二表面5
‑
108s2垂直。其中,突块5
‑
1083是于第一表面5
‑
108s1与第二表面5
‑
108s2之间突出。具体而言,突块5
‑
1083是位于第一止动元件5
‑
1081上的一阶梯结构5
‑
1085处。
[1140]
于此实施例中,如图60所示,第一强化元件5
‑
1131可为一墙壁,并且第一强化元件5
‑
1131与底座5
‑
112具有一体成形的结构。也就是说,第一强化元件5
‑
1131与底座5
‑
112具有相同材质。举例来说,第一强化元件5
‑
1131与底座5
‑
112皆具有非金属材质,例如塑胶材质。
[1141]
请再参考图60。如图60所示,第一止动部5
‑
1135是对应于活动组件5
‑
ma的镜头承载件5
‑
108的一电性连接部5
‑
108p。具体而言,电性连接部5
‑
108p是位于第一止动部5
‑
1135内。
[1142]
另外,驱动组件5
‑
da的第一线圈5
‑
cl11是经由电性连接部5
‑
108p电性连接于第一弹性元件5
‑
106。当沿着主轴5
‑
ax观察时,驱动组件5
‑
da的第一线圈5
‑
cl11的一引线5
‑
wr1
与电性连接部5
‑
108p的至少一部分重叠。具体而言,引线5
‑
wr1是缠绕于电性连接部5
‑
108p。
[1143]
值得注意的是,当沿着主轴5
‑
ax观察时,电性连接部5
‑
108p与第一止动元件5
‑
1081的至少一部分重叠。具体而言,当沿着主轴5
‑
ax观察时,第一止动元件5
‑
1081的尺寸大于电性连接部5
‑
108p,因此可以确保电性连接部5
‑
108p不会与第一强化元件5
‑
1131或底座5
‑
112碰撞而造成损坏。
[1144]
请参考图63,图63为根据本公开一实施例的光学元件驱动机构5
‑
100于另一视角的立体图。如图63所示,结构强化组件5
‑
113可还包含一第三强化元件(电路构件114),并且第三强化元件的至少一部分是内埋于底座5
‑
112。第三强化元件(电路构件114)可为金属材质制成。
[1145]
再者,于此实施例中,电路构件114是设置于底座5
‑
112内部。举例来说,底座5
‑
112是以塑胶材料制成,并且电路构件114是以模塑互联对象(molded interconnect device,mid)的方式形成于底座5
‑
112内。
[1146]
如图63所示,第三强化元件是固定地连接外壳5
‑
102。举例来说,第三强化元件可经由焊接固定于外壳5
‑
102。另外,第三强化元件也会电性连接外壳5
‑
102。由于外壳5
‑
102是光学元件驱动机构5
‑
100的一接地端,因此第三强化元件是电性接地。
[1147]
请同时参考图57、图64与图65,图64为根据本公开一实施例的光学元件驱动机构5
‑
100的部分结构的俯视图,并且图65为根据本公开一实施例的光学元件驱动机构5
‑
100的部分结构的侧视图。于此实施例中,框架5
‑
104可为一导磁元件,其具有导磁性材质,并且框架5
‑
104(导磁元件)包括一第一导磁部5
‑
1041、一第二导磁部5
‑
1042以及二连接部5
‑
1043。
[1148]
第一导磁部5
‑
1041是对应第一线圈5
‑
cl11或第一磁铁5
‑
m11(第一磁性元件),第二导磁部5
‑
1042是对应第二线圈5
‑
cl12或第二磁铁5
‑
m12(第二磁性元件),并且第一导磁部5
‑
1041是经由二连接部5
‑
1043连接于第二导磁部5
‑
1042。
[1149]
如图65所示,当沿着第一线圈5
‑
cl11与第一磁铁5
‑
m11(第一磁性元件)的排列方向(x轴)观察时,第一导磁部5
‑
1041重叠于第一线圈5
‑
cl11或第一磁铁5
‑
m11(第一磁性元件)的至少一部分。
[1150]
如图64所示,当沿着主轴5
‑
ax观察时,第一导磁部5
‑
1041位于固定组件5
‑
fa的底座5
‑
112的一第三侧边5
‑
112s3,并且第三侧边5
‑
112s3沿着一第四方向5
‑
d4延伸。当沿着主轴5
‑
ax观察时,第四方向5
‑
d4与第一方向5
‑
d1不平行。
[1151]
于此实施例中,第一导磁部5
‑
1041具有板状结构,第二导磁部5
‑
1042具有板状结构,并且连接部5
‑
1043也具有板状结构。于此实施例中,第一导磁部5
‑
1041是沿着y轴延伸,连接部5
‑
1043是沿着x轴延伸,第一磁铁5
‑
m11是固定于第一导磁部5
‑
1041,并且当沿着主轴5
‑
ax观察时,第一磁铁5
‑
m11(第一磁性元件)在第四方向5
‑
d4上的最大尺寸是小于第一导磁部5
‑
1041的最大尺寸。
[1152]
如图64所示,当沿着连接部5
‑
1043的厚度方向(z轴)观察时,框架5
‑
104(导磁元件)与第一磁铁5
‑
m11(第一磁性元件)不重叠。当沿着连接部5
‑
1043的厚度方向观察时,第一导磁部5
‑
1041与第一磁铁5
‑
m11(第一磁性元件)不重叠。
[1153]
接下来请参考图66,图66为根据本公开一实施例的图58的局部放大示意图。于此实施例中,当沿着垂直连接部5
‑
1043的厚度方向的一方向观察时(例如沿着y轴观察时),框
架5
‑
104(导磁元件)重叠于第一磁铁5
‑
m11(第一磁性元件)的至少一部分。
[1154]
具体而言,当沿着垂直连接部5
‑
1043的厚度方向的一方向观察时(例如沿着y轴观察时),连接部5
‑
1043重叠于第一磁铁5
‑
m11(第一磁性元件)的至少一部分。
[1155]
于此实施例中,第四方向5
‑
d4平行于y轴,因此当沿着第四方向5
‑
d4观察时,框架5
‑
104(导磁元件)重叠于第一磁铁5
‑
m11(第一磁性元件)的至少一部分。
[1156]
再者,如图57、图58与图66所示,活动组件5
‑
ma的镜头承载件5
‑
108是经由第二弹性元件5
‑
110活动地连接固定组件5
‑
fa。具体而言,第二弹性元件5
‑
110具有板状结构,第二弹性元件5
‑
110的外环部固定于框架5
‑
104,并且框架5
‑
104(导磁元件)是固定地设置于固定组件5
‑
fa的外壳5
‑
102上。
[1157]
当沿着垂直于主轴5
‑
ax的一方向观察时,例如沿着y轴观察时,第二弹性元件5
‑
110的至少一部分位于第一磁铁5
‑
m11(第一磁性元件)与外壳5
‑
102之间。
[1158]
于此实施例中,第二弹性元件5
‑
110的至少一部分位于框架5
‑
104(导磁元件)与外壳5
‑
102之间。具体而言,当沿着垂直主轴5
‑
ax的方向观察时,例如沿着y轴观察时,第二弹性元件5
‑
110的至少一部分(外环部)位于框架5
‑
104(导磁元件)的连接部5
‑
1043与外壳5
‑
102之间。
[1159]
如图66所示,第二弹性元件5
‑
110的一第二弹性元件表面5
‑
1101面朝框架5
‑
104(导磁元件)与第一磁铁5
‑
m11(第一磁性元件)。具体而言,第二弹性元件5
‑
110直接接触框架5
‑
104(导磁元件)与第一磁铁5
‑
m11(第一磁性元件)。
[1160]
基于上述的结构配置,可以增加驱动组件5
‑
da的驱动效率,并且也可以同时达到小型化的功效。
[1161]
请参考图67,图67为根据本公开一实施例的光学元件驱动机构5
‑
100的部分结构的剖面图。如图67所示,当沿着主轴5
‑
ax观察时,框架5
‑
104(导磁元件)是位于外壳5
‑
102的一第二侧壁5
‑
102s2以及第一磁铁5
‑
m11(第一磁性元件)之间。
[1162]
于此实施例中,外壳5
‑
102的第二侧壁5
‑
102s2具有金属材质,而框架5
‑
104(导磁元件)也具有金属材质。然而,第二侧壁5
‑
102s2与框架5
‑
104(导磁元件)具有不同的导磁系数。具体而言,第二侧壁5
‑
102s2的导磁系数小于框架5
‑
104(导磁元件)的导磁系数。
[1163]
基于上述结构设计,可以有效地避免光学元件驱动机构5
‑
100外部的元件对于驱动组件5
‑
da与框架5
‑
104的磁干扰的问题。
[1164]
本公开提供一种光学元件驱动机构,其包含底座5
‑
112以及电路组件5
‑
120,底座5
‑
112上可设置第一强化元件5
‑
1131,第一强化元件5
‑
1131与底座5
‑
112是一体成形,并且电路组件5
‑
120的一部分可设置于第一强化元件5
‑
1131内。基于此结构设计,可以强化固定组件5
‑
fa的机械结构,并且也可以进一步达成小型化的功效。
[1165]
另外,框架5
‑
104可作为导磁元件,以增加驱动组件5
‑
da的驱动效率。再者,由于本公开的第二弹性元件5
‑
110的第二弹性元件表面5
‑
1101直接接触框架5
‑
104与第一磁铁5
‑
m11,因此可使得光学元件驱动机构5
‑
100在主轴5
‑
ax上的尺寸可以进一步缩小,达成小型化的功效。
[1166]
请参考图68至图70,图68为根据本公开一实施例的光学元件驱动机构6
‑
100的立体示意图,图69为根据本公开一实施例的一光学元件驱动机构6
‑
100的爆炸图,并且图70为根据本公开一实施例的光学元件驱动机构6
‑
100沿图68中6
‑
a
‑6‑
a线段的剖视图。光学元件
驱动机构6
‑
100可为一光学摄像模块,配置以承载并驱动一光学元件。光学元件驱动机构6
‑
100是可安装于各种电子装置或可携式电子装置,例如设置于智能手机,以供使用者执行图像提取的功能。于此实施例中,光学元件驱动机构6
‑
100可为具有具备自动对焦(af)功能的音圈马达(vcm),但本公开不以此为限。在其他实施例中,光学元件驱动机构6
‑
100也可具备自动对焦(af)及光学防手震(ois)功能。
[1167]
在本实施例中,光学元件驱动机构6
‑
100可包含一固定组件6
‑
fa、一活动组件6
‑
ma、一第一驱动组件6
‑
da1以及一第二驱动组件6
‑
da2。活动组件6
‑
ma是活动地连接固定组件6
‑
fa,并且活动组件6
‑
ma是配置以承载光学元件(图中未表示)。第一驱动组件6
‑
da1以及一第二驱动组件6
‑
da2是配置以驱动活动组件6
‑
ma相对固定组件6
‑
fa运动。
[1168]
于此实施例中,如图69所示,固定组件6
‑
fa包含一外壳6
‑
102以及一底座6
‑
112,活动组件6
‑
ma包含一镜头承载件6
‑
108、前述的光学元件以及框架6
‑
104,并且镜头承载件6
‑
108是用以承载光学元件。
[1169]
前述壳体6
‑
102具有一中空结构,并且其上形成有一壳体开孔6
‑
1021,底座6
‑
112上形成有一底座开孔6
‑
1121,壳体开孔6
‑
1021的中心是对应于镜头承载件6
‑
108所承载的一光学元件(图未示)的光轴6
‑
o,并且底座开孔6
‑
1121是对应于设置在底座6
‑
112下方的图像感测元件(图未示)。壳体6
‑
102可具有一容置空间6
‑
1023,用以容置前述活动组件6
‑
ma(包含前述光学元件、镜头承载件6
‑
108)以及这些驱动组件。
[1170]
再者,第一驱动组件6
‑
da1可包含一驱动线圈6
‑
cld以及四个磁性元件6
‑
me。第二驱动组件6
‑
da2可包含四个磁性元件6
‑
me以及一电路组件6
‑
114。电路组件6
‑
114可为一电路板并且其内设置有四个感应线圈6
‑
1141。感应线圈6
‑
1141的数目不限于此实施例。
[1171]
如图69所示,镜头承载件6
‑
108具有一中空环状结构,并且具有一贯穿孔6
‑
1081,其中贯穿孔6
‑
1081与所述光学元件之间配置有对应锁合的螺牙结构(图未示),可令所述光学元件锁固于贯穿孔6
‑
1081内。再者,驱动线圈6
‑
cld是可环绕设置于镜头承载件6
‑
108上。另外,框架6
‑
104具有多个凹槽6
‑
1041以及一中央开口6
‑
1043。于此实施例中,框架6
‑
104具有四个凹槽6
‑
1041,用以容置前述四个磁性元件6
‑
me,但凹槽6
‑
1041与磁性元件6
‑
me的数量不限于此实施例。镜头承载件6
‑
108与前述光学元件是设置于中央开口6
‑
1043内并可相对于框架6
‑
104移动。
[1172]
于此实施例中,光学元件驱动机构6
‑
100可还包含一第一弹性元件6
‑
106以及一第二弹性元件6
‑
110,镜头承载件6
‑
108可通过第一弹性元件6
‑
106与第二弹性元件6
‑
110连接于框架6
‑
104而悬吊于中央开口6
‑
1043内。当驱动线圈6
‑
cld通电时,四个磁性元件6
‑
me会与驱动线圈6
‑
cld产生电磁驱动力,借以驱动镜头承载件6
‑
108相对于框架6
‑
104沿光轴6
‑
o(z轴方向)移动,以进行自动对焦(auto focusing)。
[1173]
再者,由图69可以看出,光学元件驱动机构6
‑
100还包含四个弹性元件6
‑
116(第三弹性元件),每一个弹性元件6
‑
116皆具有长条形结构,例如为一柱状或线状结构,但不限于此。其中,每一个弹性元件6
‑
116的一端是连接第一弹性元件6
‑
106,并且弹性元件6
‑
116的另一端是连接于底座6
‑
112并电性连接于电路组件6
‑
114。通过前述结构配置,镜头承载件6
‑
108以及其所承载的光学元件(图未示)与框架6
‑
104可通过四个可挠曲的弹性元件6
‑
116而相对底座6
‑
112沿着平行于x
‑
y平面的方向位移。
[1174]
当这些感应线圈6
‑
1141通电与相对应的磁性元件6
‑
me感应时,会产生电磁驱动力
驱动镜头承载件6
‑
108与所述光学元件沿y轴方向或沿x轴方向移动。因此,当光学元件驱动机构6
‑
100受到晃动时,镜头承载件6
‑
108可被前述电磁驱动力所驱动而于x
‑
y平面上移动,以达到光学防手震(optical image stabilization)的目的。
[1175]
请参考图69与图71,图71为根据本公开一实施例的底座6
‑
112的俯视图。于此实施例中,外壳6
‑
102以及底座6
‑
112是沿着一主轴6
‑
ax排列,并且光学元件驱动机构6
‑
100可包含多个电路构件,以金属材质制成。举例来说,光学元件驱动机构6
‑
100可包含一第一电路构件6
‑
117以及多个第二电路构件6
‑
118。
[1176]
再者,于此实施例中,这些电路构件是设置于底座6
‑
112内部。举例来说,底座6
‑
112是以塑胶材料制成,并且电路构件是以模塑互联对象(molded interconnect device,mid)的方式形成于底座6
‑
112内。
[1177]
意即,第一电路构件6
‑
117与第二电路构件6
‑
118是埋设于底座6
‑
112。再者,第一电路构件6
‑
117是配置以电性接地,而这些第二电路构件6
‑
118是配置以传输电子信号。另外,第一电路构件6
‑
117是配置以固定地连接于固定组件6
‑
fa的外壳6
‑
102。
[1178]
如图71所示,当沿着主轴6
‑
ax观察时,底座6
‑
112具有矩形结构,并且第一电路构件6
‑
117具有多个接脚,设置于底座6
‑
112的四个侧边。举例来说,第一电路构件6
‑
117的接脚6
‑
1171是设置于底座6
‑
112的一第一侧边6
‑
112s1。
[1179]
再者,当沿着主轴6
‑
ax观察时,第一电路构件6
‑
117是设置于二第二电路构件6
‑
118之间。举例来说,如图71所示,第一电路构件6
‑
117的左侧部分是位于左上角的第二电路构件6
‑
118与靠近底座开孔6
‑
1121的第二电路构件6
‑
118之间。
[1180]
值得注意的是,当沿着主轴6
‑
ax观察时,第一电路构件6
‑
117为一连续线段,依序沿着底座6
‑
112的第一侧边6
‑
112s1、一第二侧边6
‑
112s2、一第三侧边6
‑
112s3以及一第四侧边6
‑
112s4延伸。具体而言,当沿着主轴6
‑
ax观察时,第一电路构件6
‑
117是围绕底座6
‑
112的底座开孔6
‑
1121。
[1181]
请参考图68、图71以及图72,并且图72为根据本公开一实施例的光学元件驱动机构6
‑
100的主视图。当沿着垂直于主轴6
‑
ax的一第一方向6
‑
d1(x轴)观察时,如图72所示,接脚6
‑
1171与外壳6
‑
102之间形成有一间隙6
‑
gp。再者,当沿着第一方向6
‑
d1观察时,外壳6
‑
102形成有一凹口6
‑
102c,配置以容置接脚6
‑
1171。
[1182]
再者,当沿着主轴6
‑
ax观察时,接脚6
‑
1171具有二个内凹部6
‑
1172,接脚6
‑
1171也具有三凸出部6
‑
1173,并且内凹部6
‑
1172是形成于二凸出部6
‑
1173之间。
[1183]
于此实施例中,这三个凸出部6
‑
1173可通过激光熔接固定于凹口6
‑
102c。值得注意的是,内凹部6
‑
1172没有通过激光熔接固定于凹口6
‑
102c。基于此结构设计,可以在单一接脚6
‑
1171上形成更多的焊接点,借以增加第一电路构件6
‑
117与外壳6
‑
102之间的连接强度,并且同时也可以达成简化焊接工艺的优点。
[1184]
请参考图69、图70与图73,图73为根据本公开一实施例的光学元件驱动机构6
‑
100的部分结构的俯视图。于此实施例中,如图70所示,镜头承载件6
‑
108是通过第一弹性元件6
‑
106以及第二弹性元件6
‑
110活动地连接于框架6
‑
104。
[1185]
如图73所示,框架6
‑
104的一角落可上形成有二定位柱6
‑
1044,并且第一弹性元件6
‑
106具有一外侧定位部6
‑
1061,对应于此二定位柱6
‑
1044。当沿着主轴6
‑
ax观察时,二定位柱6
‑
1044是穿过外侧定位部6
‑
1061的二定位孔6
‑
ph1,以使第一弹性元件6
‑
106定位于框
架6
‑
104。
[1186]
如图73所示,第一弹性元件6
‑
106还具有一开槽6
‑
106st,形成于外侧定位部6
‑
1061,并且开槽6
‑
106st是连通于定位孔6
‑
ph1。再者,当沿着主轴6
‑
ax观察时,开槽6
‑
106st是位于二定位柱6
‑
1044之间并且配置以接收一第一粘着元件6
‑
ae1。
[1187]
请一起参考图73与图74,并且图74为根据本公开一实施例的第一弹性元件6
‑
106与框架6
‑
104沿着开槽6
‑
106st的一延伸方向观察的剖面图。框架6
‑
104可还具有一容置槽6
‑
ac,对应于开槽6
‑
106st。当沿着主轴6
‑
ax观察时,容置槽6
‑
ac是位于二定位柱6
‑
1044之间并且配置以接收第一粘着元件6
‑
ae1。
[1188]
当沿着开槽6
‑
106st的延伸方向观察时,如图74所示,容置槽6
‑
ac的尺寸是大于开槽6
‑
106st的尺寸。第一粘着元件6
‑
ae1可由开槽6
‑
106st流入容置槽6
‑
ac内,借以使第一弹性元件6
‑
106的外侧定位部6
‑
1061更稳定地固定于框架6
‑
104。
[1189]
于此实施例中,当沿着主轴6
‑
ax观察时,二定位柱6
‑
1044的尺寸大小相同,但不限于此。在本公开的其他实施例中,二定位柱6
‑
1044的尺寸大小不同。
[1190]
在本公开中,弹性元件6
‑
116也可称为第三弹性元件,并且第一弹性元件6
‑
106是通过第三弹性元件连接于底座6
‑
112。如图73所示,当沿着主轴6
‑
ax观看时,第一弹性元件6
‑
106可还具有一外侧弦线6
‑
1064,连接于外侧定位部6
‑
1061的两端。
[1191]
值得注意的是,当沿着主轴6
‑
ax观看时,外侧弦线6
‑
1064可形成至少一封闭开口。如图73所示,外侧弦线6
‑
1064可形成有三个不同大小的封闭开口6
‑
co1、封闭开口6
‑
co2与封闭开口6
‑
co3。再者,当沿着主轴6
‑
ax观看时,弹性元件6
‑
116(第三弹性元件)位于这些封闭开口外。
[1192]
基于外侧弦线6
‑
1064与外侧定位部6
‑
1061的设计,可以避免应力集中的问题,进而避免当活动组件6
‑
ma运动时第一弹性元件6
‑
106断裂的问题。
[1193]
请参考图73与图75,并且图75为根据本公开一实施例的光学元件驱动机构6
‑
100的部分结构的立体图。于此实施例中,第一弹性元件6
‑
106还具有至少一内侧定位部6
‑
1062,固定地连接于镜头承载件6
‑
108。
[1194]
第一弹性元件6
‑
106可还具有至少一内侧弦线6
‑
1065,并且外侧定位部6
‑
1061是经由内侧弦线6
‑
1065连接于内侧定位部6
‑
1062。再者,如图75所示,镜头承载件6
‑
108形成有一内凹结构6
‑
108c,对应于内侧弦线6
‑
1065的至少一部分。
[1195]
基于内凹结构6
‑
108c的设计,可以避免当活动组件6
‑
ma运动时,第一弹性元件6
‑
106的内侧弦线6
‑
1065撞击镜头承载件6
‑
108而造成断裂的问题。
[1196]
再者,如图73所示,镜头承载件6
‑
108形成有至少二沟槽6
‑
108st,配置以设置一第一稳定元件6
‑
se1。第一稳定元件6
‑
se1可为凝胶,但不限于此。另外,框架6
‑
104具有一凸块6
‑
1045,对应于二沟槽6
‑
108st。当沿着主轴6
‑
ax观看时,凸块6
‑
1045可形成有一梯形凹槽6
‑
104c,配置以接收第一稳定元件6
‑
se1。
[1197]
基于沟槽6
‑
108st与凸块6
‑
1045的设计,可以使设置第一稳定元件6
‑
se1的过程更简便,并且也可增加第一稳定元件6
‑
se1定位的精确度。
[1198]
请参考图76,图76为根据本公开一实施例的光学元件驱动机构6
‑
100于另一视角的部分结构的立体图。如图76所示,驱动线圈6
‑
cld是设置于镜头承载件6
‑
108上,而镜头承载件6
‑
108具有一绕线结构6
‑
108p,并且驱动线圈6
‑
cld的一引线6
‑
wr1是缠绕于绕线结构
6
‑
108p上。
[1199]
当沿着绕线结构6
‑
108p的延伸方向观察时,绕线结构6
‑
108p具有一圆角6
‑
1083(fillet)结构,配置以导引引线6
‑
wr1。基于圆角6
‑
1083的结构设计,可以使引线6
‑
wr1更稳定地缠绕于绕线结构6
‑
108p并且不容易断裂。
[1200]
本公开提供一种光学元件驱动机构6
‑
100,其包含有多个电路构件,设置于底座6
‑
112内。第一电路构件6
‑
117具有多个接脚,设置于底座6
‑
112的四个侧边,并且第一电路构件6
‑
117是配置以电性接地。接脚6
‑
1171具有三凸出部6
‑
1173,可通过激光熔接固定于外壳6
‑
102的凹口6
‑
102c。基于此结构设计,可以在单一接脚6
‑
1171上形成更多的焊接点,借以增加第一电路构件6
‑
117与外壳6
‑
102之间的连接强度,并且同时也可以达成简化焊接工艺的优点。
[1201]
另外,第一弹性元件6
‑
106具有一外侧定位部6
‑
1061,定位于框架6
‑
104上,并且第一弹性元件6
‑
106可还具有外侧弦线6
‑
1064,连接于外侧定位部6
‑
1061的两端。外侧弦线6
‑
1064可形成有多个不同大小的封闭开口,并且第三弹性元件位于这些封闭开口外。基于外侧弦线6
‑
1064与外侧定位部6
‑
1061的设计,可以避免应力集中的问题。
[1202]
请参考图77至图79,图77为根据本公开一实施例的光学元件驱动机构7
‑
100的立体示意图,图78为根据本公开一实施例的一光学元件驱动机构7
‑
100的爆炸图,并且图79为根据本公开一实施例的光学元件驱动机构7
‑
100沿图77中7
‑
a
‑7‑
a线段的剖视图。光学元件驱动机构7
‑
100可为一光学摄像模块,配置以承载并驱动一光学元件。光学元件驱动机构7
‑
100是可安装于各种电子装置或可携式电子装置,例如设置于智能手机,以供使用者执行图像提取的功能。于此实施例中,光学元件驱动机构7
‑
100可为具有具备自动对焦(af)功能的音圈马达(vcm),但本公开不以此为限。在其他实施例中,光学元件驱动机构7
‑
100也可具备自动对焦(af)及光学防手震(ois)功能。
[1203]
在本实施例中,光学元件驱动机构7
‑
100可包含一固定组件7
‑
fa、一活动组件7
‑
ma、一第一驱动组件7
‑
da1以及一第二驱动组件7
‑
da2。活动组件7
‑
ma是活动地连接固定组件7
‑
fa,并且活动组件7
‑
ma是配置以承载光学元件(图中未表示)。第一驱动组件7
‑
da1以及一第二驱动组件7
‑
da2是配置以驱动活动组件7
‑
ma相对固定组件7
‑
fa运动。
[1204]
于此实施例中,如图78所示,固定组件7
‑
fa包含一外壳7
‑
102以及一底座7
‑
112,活动组件7
‑
ma包含一镜头承载件7
‑
108、前述的光学元件以及框架7
‑
104,并且镜头承载件7
‑
108是用以承载光学元件。
[1205]
前述壳体7
‑
102具有一中空结构,并且其上形成有一壳体开孔7
‑
1021,底座7
‑
112上形成有一底座开孔7
‑
1121,壳体开孔7
‑
1021的中心是对应于镜头承载件7
‑
108所承载的一光学元件(图未示)的光轴7
‑
o,并且底座开孔7
‑
1121是对应于设置在底座7
‑
112下方的图像感测元件(图未示)。壳体7
‑
102可具有一容置空间7
‑
1023,用以容置前述活动组件7
‑
ma(包含前述光学元件、镜头承载件7
‑
108)以及这些驱动组件。
[1206]
再者,第一驱动组件7
‑
da1可包含一驱动线圈7
‑
cld以及四个磁性元件7
‑
me。第二驱动组件7
‑
da2可包含四个磁性元件7
‑
me以及一电路组件7
‑
114。电路组件7
‑
114可为一电路板并且其内设置有四个感应线圈7
‑
1141。感应线圈7
‑
1141的数目不限于此实施例。
[1207]
如图78所示,镜头承载件7
‑
108具有一中空环状结构,并且具有一贯穿孔7
‑
1081,其中贯穿孔7
‑
1081与所述光学元件之间配置有对应锁合的螺牙结构(图未示),可令所述光
学元件锁固于贯穿孔7
‑
1081内。再者,驱动线圈7
‑
cld是可环绕设置于镜头承载件7
‑
108上。另外,框架7
‑
104具有多个凹槽7
‑
1041以及一中央开口7
‑
1043。于此实施例中,框架7
‑
104具有四个凹槽7
‑
1041,用以容置前述四个磁性元件7
‑
me,但凹槽7
‑
1041与磁性元件7
‑
me的数量不限于此实施例。镜头承载件7
‑
108与前述光学元件是设置于中央开口7
‑
1043内并可相对于框架7
‑
104移动。
[1208]
于此实施例中,光学元件驱动机构7
‑
100可还包含一第一弹性元件7
‑
106以及一第二弹性元件7
‑
110,镜头承载件7
‑
108可通过第一弹性元件7
‑
106与第二弹性元件7
‑
110连接于框架7
‑
104而悬吊于中央开口7
‑
1043内。当驱动线圈7
‑
cld通电时,四个磁性元件7
‑
me会与驱动线圈7
‑
cld产生电磁驱动力,借以驱动镜头承载件7
‑
108相对于框架7
‑
104沿光轴7
‑
o(z轴方向)移动,以进行自动对焦(auto focusing)。
[1209]
再者,由图78可以看出,光学元件驱动机构7
‑
100还包含四个弹性元件7
‑
116(第三弹性元件),每一个弹性元件7
‑
116皆具有长条形结构,例如为一柱状或线状结构,但不限于此。其中,每一个弹性元件7
‑
116的一端是连接第一弹性元件7
‑
106,并且弹性元件7
‑
116的另一端是连接于底座7
‑
112并电性连接于电路组件7
‑
114。通过前述结构配置,镜头承载件7
‑
108以及其所承载的光学元件(图未示)与框架7
‑
104可通过四个可挠曲的弹性元件7
‑
116而相对底座7
‑
112沿着平行于x
‑
y平面的方向位移。
[1210]
当这些感应线圈7
‑
1141通电与相对应的磁性元件7
‑
me感应时,会产生电磁驱动力驱动镜头承载件7
‑
108与所述光学元件沿y轴方向或沿x轴方向移动。因此,当光学元件驱动机构7
‑
100受到晃动时,镜头承载件7
‑
108可被前述电磁驱动力所驱动而于x
‑
y平面上移动,以达到光学防手震(optical image stabilization)的目的。
[1211]
请参考图78。于此实施例中,外壳7
‑
102以及底座7
‑
112是沿着一主轴7
‑
ax排列,并且光学元件驱动机构7
‑
100可包含多个电路构件,以金属材质制成。举例来说,光学元件驱动机构7
‑
100可包含一第一电路构件7
‑
117以及多个第二电路构件7
‑
118。
[1212]
再者,于此实施例中,这些电路构件是设置于底座7
‑
112内部。举例来说,底座7
‑
112是以塑胶材料制成,并且电路构件是以模塑互联对象(molded interconnect device,mid)的方式形成于底座7
‑
112内。
[1213]
意即,第一电路构件7
‑
117与第二电路构件7
‑
118是埋设于底座7
‑
112。再者,第一电路构件7
‑
117是配置以电性接地,而这些第二电路构件7
‑
118是配置以传输电子信号。另外,第一电路构件7
‑
117是配置以固定地连接于固定组件7
‑
fa的外壳7
‑
102。
[1214]
请参考图80,图80为根据本公开一实施例的光学元件驱动机构7
‑
100的移除外壳7
‑
102的立体图。如图80所示,第一弹性元件7
‑
106是通过弹性元件7
‑
116(第三弹性元件)连接于底座7
‑
112。
[1215]
再者,框架7
‑
104可具有多边形结构。举例来说,于此实施例中,当沿着主轴7
‑
ax观察时,框架7
‑
104可具有矩形结构。另外,框架7
‑
104上可形成有一止挡结构7
‑
104p,由框架7
‑
104的一侧边7
‑
104s1凸出。具体而言,框架7
‑
104可形成有四个止挡结构7
‑
104p,分别位于框架7
‑
104的四个侧边。
[1216]
在本公开中,第二驱动组件7
‑
da2是配置以驱动活动组件7
‑
ma沿着第一方向7
‑
d1及/或第二方向7
‑
d2运动,其中第一方向7
‑
d1垂直于主轴7
‑
ax,并且第一方向7
‑
d1垂直于第二方向7
‑
d2。
[1217]
这些止挡结构7
‑
104p是配置以于框架7
‑
104运动时抵接于外壳7
‑
102,以限制框架7
‑
104的运动范围。值得注意的是,止挡结构7
‑
104p可为e字形,因此可以增加撞击的面积,借以分散撞击压力,以避免微粒的产生。
[1218]
请参考图81至图83,图81为根据本公开一实施例的框架7
‑
104、镜头承载件7
‑
108以及第二弹性元件7
‑
110由底部观察的立体图,图82为根据本公开一实施例的光学元件驱动机构7
‑
100于另一视角的剖面图,并且图83为根据本公开一实施例的框架7
‑
104、镜头承载件7
‑
108以及第二弹性元件7
‑
110的底部视图。
[1219]
如图所示,第二弹性元件7
‑
110具有一内侧定位部7
‑
1102,连接于镜头承载件7
‑
108。镜头承载件7
‑
108具有一凸部7
‑
108pp,穿过内侧定位部7
‑
1102,以使第二弹性元件7
‑
110固定地连接于镜头承载件7
‑
108。
[1220]
另外,内侧定位部7
‑
1102具有一开口7
‑
110h,框架7
‑
104具有定位槽7
‑
104c,对应于开口7
‑
110h,并且定位槽7
‑
104c是配置以容置一接着元件7
‑
ae。接着元件7
‑
ae例如可为胶水,配置以使内侧定位部7
‑
1102固定于镜头承载件7
‑
108。
[1221]
值得注意的是,凸部7
‑
108pp例如是卡合于内侧定位部7
‑
1102,并且开口7
‑
110h是邻接于凸部7
‑
108pp。基于上述设计,可以增加内侧定位部7
‑
1102与镜头承载件7
‑
108之间的连接强度。
[1222]
如图81与图82所示,镜头承载件7
‑
108具有一接触面7
‑
sr1以及一非接触面7
‑
sr2,接触面7
‑
sr1是配置以接触内侧定位部7
‑
1102,而非接触面7
‑
sr2没有接触到内侧定位部7
‑
1102。接触面7
‑
sr1以及非接触面7
‑
sr2之间形成有一第一斜面7
‑
is1以及一第二斜面7
‑
is2。
[1223]
如图82所示,当沿着垂直于主轴7
‑
ax的一第一方向7
‑
d1观察时,第二斜面7
‑
is2的斜率大于第一斜面7
‑
is1的斜率。另外,如图83所示,当沿着主轴7
‑
ax观察时,第二斜面7
‑
is2与主轴7
‑
ax的最短距离小于第一斜面7
‑
is1与主轴7
‑
ax的最短距离。
[1224]
再者,当沿着第一方向7
‑
d1观察时,接触面7
‑
sr1与底座7
‑
112在主轴7
‑
ax上的一第一距离7
‑
ds1是小于非接触面7
‑
sr2与底座7
‑
112在主轴7
‑
ax上的一第二距离7
‑
ds2。当沿着主轴7
‑
ax观察时,第一斜面7
‑
is1是重叠于第二弹性元件7
‑
110的至少一部分。
[1225]
具体而言,如图81与图83所示,第二弹性元件7
‑
110包含一外侧定位部7
‑
1101以及一连接弦线7
‑
1103。外侧定位部7
‑
1101是固定地连接于框架7
‑
104,并且外侧定位部7
‑
1101是经由连接弦线7
‑
1103连接于内侧定位部7
‑
1102。当沿着主轴7
‑
ax观察时,第一斜面7
‑
is1及/或第二斜面7
‑
is2重叠于连接弦线7
‑
1103。
[1226]
请参考图81与图84,图84为根据本公开一实施例的框架7
‑
104、镜头承载件7
‑
108以及第二弹性元件7
‑
110于另一视角的立体图。如图所示,框架7
‑
104具有一底面7
‑
104bs,并且外侧定位部7
‑
1101是接触于底面7
‑
104bs。
[1227]
另外,框架7
‑
104还具有一闪避凹槽7
‑
104vc,其是由底面7
‑
104bs沿着主轴7
‑
ax(z轴方向)凹陷。当沿着主轴7
‑
ax观察时,闪避凹槽7
‑
104vc是重叠于连接弦线7
‑
1103的至少一部分。基于此结构设计,可以避免当镜头承载件7
‑
108运动时连接弦线7
‑
1103撞击到框架7
‑
104而造成损坏的问题。
[1228]
如图83与图84所示,框架7
‑
104可具有一凸出结构7
‑
1045,由底面7
‑
104bs沿着主轴7
‑
ax凸出。再者,外侧定位部7
‑
1101可具有一夹钳(clamp)结构7
‑
1105,并且当沿着主轴
7
‑
ax观察时,夹钳结构7
‑
1105包围凸出结构7
‑
1045的至少一部分。
[1229]
举例来说,所述夹钳结构具有一第一夹钳端7
‑
ce1以及一第二夹钳端7
‑
ce2,当沿着第一方向7
‑
d1观察时,第二夹钳端7
‑
ce2是重叠于凸出结构7
‑
1045,并且当沿着垂直于主轴7
‑
ax的一第二方向7
‑
d2观察时,第一夹钳端7
‑
ce1重叠于凸出结构7
‑
1045。基于此结构设计,可以增加第二弹性元件7
‑
110定位于框架7
‑
104的精确度。
[1230]
请参考图85,图85为根据本公开一实施例的镜头承载件7
‑
108以及电路组件7
‑
114于另一视角的立体剖面图。如图85所示,镜头承载件7
‑
108具有一止挡件7
‑
1085,配置以于镜头承载件7
‑
108运动时抵接第二驱动组件7
‑
da2的电路组件7
‑
114。
[1231]
止挡件7
‑
1085是配置以限制镜头承载件7
‑
108于主轴7
‑
ax上的运动范围,并且止挡件7
‑
1085可具有一第一圆角结构7
‑
ft1以及一第二圆角结构7
‑
ft2。第一圆角结构7
‑
ft1为一凸出结构,而第二圆角结构7
‑
ft2为凹陷结构,并且第二圆角结构7
‑
ft2是位于第一圆角结构7
‑
ft1中。
[1232]
基于第一圆角结构7
‑
ft1与第二圆角结构7
‑
ft2的设计,可以避免止挡件7
‑
1085撞到电路组件7
‑
114时产生颗粒的问题。
[1233]
请参考图86,图86为根据本公开一实施例的镜头承载件7
‑
108的立体图。于此实施例中,镜头承载件7
‑
108具有一第一内环面7
‑
1086以及一第二内环面7
‑
1087。其中,第一内环面7
‑
1086平行于主轴7
‑
ax,并且第二内环面7
‑
1087不平行于主轴7
‑
ax。基于此结构设计,可以使镜头承载件7
‑
108承载具有大镜片的镜头(光学元件),并且也可以增加镜头承载件7
‑
108与镜头之间的连接强度。
[1234]
请参考图87与图88,图87为根据本公开一实施例的电路组件7
‑
114与底座7
‑
112的俯视图,并且图88为根据本公开一实施例的电路组件7
‑
114与底座7
‑
112的剖面图。于此实施例中,当沿着主轴7
‑
ax观察时,底座7
‑
112的一部分(一承接部7
‑
1123)是由第二驱动组件7
‑
da2的电路组件7
‑
114凸出。
[1235]
再者,光学元件驱动机构7
‑
100可还包含一捕捉元件7
‑
ce,固定地设置于承接部7
‑
1123上,并且捕捉元件7
‑
ce配置以捕捉光学元件驱动机构7
‑
100内部的灰尘或颗粒。举例来说,捕捉元件7
‑
ce可为胶水,配置以粘住灰尘或颗粒,以避免灰尘或颗粒掉落至底座7
‑
112下方的图像感测元件。
[1236]
本公开提供一种光学元件驱动机构7
‑
100,其中第二弹性元件7
‑
110的外侧定位部7
‑
1101是连接于框架7
‑
104,而第二弹性元件7
‑
110的内侧定位部7
‑
1102是连接于镜头承载件7
‑
108的底部。镜头承载件7
‑
108上可形成第一斜面7
‑
is1以及第二斜面7
‑
is2,并且框架7
‑
104可形成闪避凹槽7
‑
104vc,因此可以避免当活动组件7
‑
ma运动时,连接弦线7
‑
1103碰撞框架7
‑
104或镜头承载件7
‑
108而造成损坏的问题,并且也可以达成小型化的功效。
[1237]
另外,框架7
‑
104可具有一凸出结构7
‑
1045,由底面7
‑
104bs沿着主轴7
‑
ax凸出。外侧定位部7
‑
1101可具有一夹钳(clamp)结构7
‑
1105,并且当沿着主轴7
‑
ax观察时,夹钳结构7
‑
1105包围凸出结构7
‑
1045的至少一部分。基于此结构设计,可以增加第二弹性元件7
‑
110定位于框架7
‑
104的精确度。
[1238]
本公开一实施例的一光学元件驱动机构8
‑
om可装设于一电子装置8
‑
1内,用以照相或摄影,其中前述电子装置8
‑
1例如可为智能手机或是数字相机,但本公开不限于此。应注意的是,图89中所示的光学元件驱动机构8
‑
om与电子装置8
‑
1的位置及大小关仅为一示
例,而非限制光学元件驱动机构8
‑
om与电子装置8
‑
1的位置及大小关系。实际上,光学元件驱动机构8
‑
om可根据不同的需求而装设在电子装置8
‑
1中的不同位置。
[1239]
请参阅图90,光学元件驱动机构8
‑
om承载一光学元件8
‑
oe。光学元件驱动机构8
‑
om的内部或外部可设置有一感光模块。感光模块可以位于光学元件驱动机构8
‑
om的光入射处的下游。一光线8
‑
l沿一光轴8
‑
oa入射到光学元件驱动机构8
‑
om中的光学元件8
‑
oe后,抵达感光模块以进行成像。
[1240]
请参阅图91到图93,光学元件驱动机构8
‑
om可以包括一固定部8
‑
10、一活动部8
‑
20、一驱动组件8
‑
30、一弹性组件8
‑
40、一电路组件8
‑
50、一电路构件8
‑
60、一接着元件8
‑
70以及一制震元件8
‑
80。驱动组件8
‑
30可以驱动活动部8
‑
20相对于固定部8
‑
10运动。
[1241]
在本实施例中,固定部8
‑
10可以包括一外框8
‑
11、一框架8
‑
12以及一底座8
‑
13。在本实施例中,活动部8
‑
20可以包括一光学元件承载座8
‑
21、四个活动部凹槽8
‑
22以及至少一活动部延伸柱8
‑
23。在本实施例中,驱动组件8
‑
30可以包括一驱动线圈8
‑
31以及一驱动磁性元件8
‑
32。在本实施例中,弹性组件8
‑
40可以包括一第一弹性元件8
‑
41以及一第二弹性元件8
‑
42。
[1242]
请参阅图90到图92,活动部8
‑
20接触并连接到光学元件8
‑
oe。具体地说,活动部8
‑
20的光学元件承载座8
‑
21承载并连接到光学元件8
‑
oe。光学元件承载座8
‑
21可以具有任何合适于承载并连接到光学元件8
‑
oe的形状。活动部凹槽8
‑
22形成在光学元件承载座8
‑
21上,并且沿着光轴8
‑
oa凹入到光学元件承载座8
‑
21中(可以参考图97)。活动部延伸柱8
‑
23也形成在光学元件承载座8
‑
21上,并且从光学元件承载座8
‑
21向外延伸。
[1243]
驱动组件8
‑
30的驱动线圈8
‑
31对应于驱动磁性元件8
‑
32。驱动线圈8
‑
31可通过与驱动磁性元件8
‑
32的磁场产生作用,并产生电磁驱动力以驱使活动部8
‑
20的光学元件承载座8
‑
21和光学元件8
‑
oe相对于固定部8
‑
10运动。
[1244]
弹性组件8
‑
40可以将活动部8
‑
20的光学元件承载座8
‑
21连接到固定部8
‑
10。第一弹性元件8
‑
41可以包括一弹性组件连接部8
‑
41a。详细地说,弹性组件8
‑
40的第一弹性元件8
‑
41可以将光学元件承载座8
‑
21的上部连接到框架8
‑
12。弹性组件8
‑
40的第二弹性元件8
‑
42可以将光学元件承载座8
‑
21的下部连接到底座8
‑
13,以悬吊光学元件承载座8
‑
21及光学元件8
‑
oe,并使光学元件承载座8
‑
21及光学元件8
‑
oe可以相对于固定部8
‑
10运动。
[1245]
请参阅图90到图92,外框8
‑
11可以包括一外框顶表面8
‑
111以及四个外框侧壁8
‑
112。外框顶表面8
‑
111不平行于光轴8
‑
oa。外框侧壁8
‑
112平行于光轴8
‑
oa,且从外框顶表面8
‑
111沿着光轴8
‑
oa延伸。底座8
‑
13具有一板状结构,使得外框8
‑
11可以放置在底座8
‑
13上。
[1246]
请参阅图92到图95,框架8
‑
12可以包括一导磁材料,以增强驱动磁性元件8
‑
32的磁力。而且,沿着光轴8
‑
oa观察时,框架8
‑
12具有一环形。在本实施例中,框架8
‑
12可以包括两个第一框架延伸部8
‑
121以及四个第二框架延伸部8
‑
122。
[1247]
在本实施例中,每个第一框架延伸部8
‑
121都有与其对应的两个第二框架延伸部8
‑
122。更详细地说,在本实施例中,每个第一框架延伸部8
‑
121的两端周围可以设置有两个第二框架延伸部8
‑
122,且两个第二框架延伸部8
‑
122平行于其所对应的第一框架延伸部8
‑
121。而且,每个第一框架延伸部8
‑
121又对应于(可以是连接到)外框8
‑
11的一个外框侧壁8
‑
112。
[1248]
第一框架延伸部8
‑
121可以接触驱动组件8
‑
30的驱动磁性元件8
‑
32,以增强驱动磁性元件8
‑
32的磁力。第二框架延伸部8
‑
122可以延伸至活动部凹槽8
‑
22中,以限制活动部8
‑
20的光学元件承载座8
‑
21的运动范围。
[1249]
沿着光轴8
‑
oa观察时,第一框架延伸部8
‑
121与第二框架延伸部8
‑
122不重叠。沿着垂直于光轴8
‑
oa的一第一方向8
‑
d1观察时,第一框架延伸部8
‑
121与第二框架延伸部8
‑
122重叠。沿着垂直于光轴8
‑
oa及第一方向8
‑
d1的一第二方向8
‑
d2观察时,第一框架延伸部8
‑
121与第二框架延伸部8
‑
122不重叠。上述的配置可以使得光学元件驱动机构8
‑
om小型化。
[1250]
请参阅图94到图97,固定部8
‑
10的底座8
‑
13可以包括一底座本体8
‑
131、多个底座柱8
‑
132以及四个底座角柱8
‑
133。
[1251]
底座柱8
‑
132可以设置在没有第一框架延伸部8
‑
121的光学元件驱动机构8
‑
om的侧边。底座柱8
‑
132从底座本体8
‑
131沿着光轴8
‑
oa延伸,且每个相邻的底座柱8
‑
132之间可以具有一间格8
‑
g。而活动部8
‑
20的活动部延伸柱8
‑
23可以延伸到间格8
‑
g中。在一实施例中,活动部延伸柱8
‑
23从光学元件承载座8
‑
21沿着第二方向8
‑
d2延伸到间格8
‑
g中。也就是说,沿着第一方向8
‑
d1观察时,底座柱8
‑
132与活动部延伸柱8
‑
23重叠。如此一来,可以限制活动部8
‑
20的光学元件承载座8
‑
21的运动范围。
[1252]
请特别参阅图96及图97,在一实施例中,底座柱8
‑
132与活动部延伸柱8
‑
23之间的一最短距离8
‑
s1小于第二框架延伸部8
‑
122与活动部凹槽8
‑
22之间的一最短距离8
‑
s2。如此一来,可以更有效的限制光学元件承载座8
‑
21的运动范围,并且可以避免第二框架延伸部8
‑
122与活动部凹槽8
‑
22的壁面接触后所产生的微粒。
[1253]
如图94所示,每个底座柱8
‑
132可以包括一第一底座柱表面8
‑
132a。底座柱8
‑
132还可以包括一第二底座柱表面8
‑
132b。第一底座柱表面8
‑
132a为一斜面,也就是说,第一底座柱表面8
‑
132a不垂直且不平行于光轴8
‑
oa。此配置可以有利于光学元件驱动机构8
‑
om的加工及组装。
[1254]
第二底座柱表面8
‑
132b平行于光轴8
‑
oa。第二底座柱表面8
‑
132b具有一凹凸结构8
‑
132b’,且凹凸结构8
‑
132b’及外框8
‑
11之间设置有接着元件8
‑
70。此配置可以加强底座8
‑
13及外框8
‑
11的接着,以避免底座8
‑
13及外框8
‑
11彼此分离,进而强化光学元件驱动机构8
‑
om的结构。
[1255]
如图94及图95所示,四个底座角柱8
‑
133分别位于底座本体8
‑
131的四个不同角落。底座角柱8
‑
133从底座本体8
‑
131沿着光轴8
‑
oa延伸。底座角柱8
‑
133及活动部8
‑
20的光学元件承载座8
‑
21之间设置有制震元件8
‑
80。如此一来,可以降低光学元件承载座8
‑
21所受到的加速度,避免光学元件承载座8
‑
21因撞击其他元件而造成损坏。
[1256]
请参考图95,电路组件8
‑
50可以设置在没有第一框架延伸部8
‑
121的光学元件驱动机构8
‑
om的侧边。也就是说,底座8
‑
13的底座柱8
‑
132及电路组件8
‑
50可以位在光学元件驱动机构8
‑
om的同一侧边。
[1257]
电路构件8
‑
60可以是埋入式射出成型(insert molding)在底座8
‑
13中。而且,电路构件8
‑
60可以延伸至底座柱8
‑
132中(图未示)。以此配置,可以使得电路构件8
‑
60受到更好的保护,并且易于电性连接至其他元件(例如,电路组件8
‑
50)。
[1258]
请参阅图98,沿着光轴8
‑
oa观察时,外框8
‑
11、框架8
‑
12以及弹性组件8
‑
40彼此重
叠。而且,在本实施例中,框架8
‑
12可以位于外框8
‑
11的外框顶表面8
‑
111及弹性组件8
‑
40的第一弹性元件8
‑
41之间。也就是说,第一弹性元件8
‑
41并非直接接触外框顶表面8
‑
111,而且第一弹性元件8
‑
41远离外框顶表面8
‑
111一段距离。
[1259]
换句话说,第一弹性元件8
‑
41的弹性组件连接部8
‑
41a可以接触且固定至框架8
‑
12。然而,弹性组件连接部8
‑
41a不接触外框8
‑
11。以此配置,可以增加第一弹性元件8
‑
41沿着光轴8
‑
oa的伸展,可以增加光学元件承载座8
‑
21的运动范围。
[1260]
应注意的是,在一实施例中,外框顶表面8
‑
111、框架8
‑
12以及第一弹性元件8
‑
41以激光熔接而彼此连接。而且,外框顶表面8
‑
111为一平面。
[1261]
请参阅图99,在一实施例中,弹性组件连接部8
‑
41a没有孔洞的,也就是说,框架8
‑
12并未暴露于弹性组件连接部8
‑
41a。以此配置,可以有利于光学元件驱动机构8
‑
om的加工及组装。
[1262]
请参阅图100,在另一实施例中,弹性组件连接部8
‑
41a具有孔洞的,也就是说,框架8
‑
12暴露于弹性组件连接部8
‑
41a。而弹性组件连接部8
‑
41a的孔洞可以容纳有接着元件8
‑
70,以使得第一弹性元件8
‑
41与框架8
‑
12之间的连间更为稳固。
[1263]
接下来,将描述一种光学元件驱动机构驱动系统8
‑
os,其中光学元件驱动机构驱动系统8
‑
os所包含的相同或类似的元件以类似的符号表示,且可执行相同或类似的功能,其相关内容不再赘述,且可能在附图中省略。
[1264]
请参阅图101,光学元件驱动机构驱动系统8
‑
os可以包括一第一光学元件驱动机构8
‑
om1以及一第二光学元件驱动机构8
‑
om2。
[1265]
类似于光学元件驱动机构8
‑
om,第一光学元件驱动机构8
‑
om1可以包括一第一机构固定部8
‑
om1
‑
10、一第一机构活动部8
‑
om1
‑
20以及一第一机构驱动组件8
‑
om1
‑
30。第一机构驱动组件8
‑
om1
‑
30可以驱动第一机构活动部8
‑
om1
‑
20相对于第一机构固定部8
‑
om1
‑
10运动。
[1266]
类似于光学元件驱动机构8
‑
om,第二光学元件驱动机构8
‑
om2可以包括一第二机构固定部8
‑
om2
‑
10、一第二机构活动部8
‑
om2
‑
20、一第二机构驱动组件8
‑
om2
‑
30以及一第二机构电路组件8
‑
om2
‑
50。第二机构驱动组件8
‑
om2
‑
30可以驱动第二机构活动部8
‑
om2
‑
20相对于第二机构固定部8
‑
om2
‑
10运动。
[1267]
类似地,第二机构固定部8
‑
om2
‑
10的一第二机构第一框架延伸部8
‑
om2
‑
121接触第二机构驱动组件8
‑
om2
‑
30,且第二机构固定部8
‑
om2
‑
10的一第二机构第二框架延伸部8
‑
om2
‑
122延伸至第二机构活动部8
‑
om2
‑
20的一第二机构活动部凹槽8
‑
om2
‑
22中。
[1268]
在本实施例中,可以将第二光学元件驱动机构8
‑
om2视作为把光学元件驱动机构8
‑
om围绕光轴8
‑
oa顺时针旋转90度。因此,沿着第二方向8
‑
d2观察时,第二机构第一框架延伸部8
‑
om2
‑
121与第二机构第二框架延伸部8
‑
om2
‑
122重叠(图未示)。
[1269]
在本实施例中,第一光学元件驱动机构8
‑
om1与第二光学元件驱动机构8
‑
om2沿着第二方向8
‑
d2排列。第二光学元件驱动机构8
‑
om2的第二机构电路组件8
‑
om2
‑
50不邻近于第一光学元件驱动机构8
‑
om1。以此配置,可以使得光学元件驱动机构驱动系统8
‑
os更易于电性连接到其他元件或外部元件,并且第一机构驱动组件8
‑
om1
‑
30及第二机构驱动组件8
‑
om2
‑
30的磁力不会互相干扰。
[1270]
本公开实施例的光学元件驱动机构8
‑
om可以避免产生微粒,并且可以使得光学元
件驱动机构8
‑
om小型化。而且,本公开实施例的光学元件驱动机构8
‑
om的配置有利于光学元件驱动机构8
‑
om的加工及组装,并且强化光学元件驱动机构8
‑
om的结构。
[1271]
本公开实施例的光学元件驱动机构驱动系统8
‑
os除了有上述的好处之外,还可以易于连接到外部元件,并且可以避免驱动磁性元件的磁力彼此干扰,以有效运用驱动磁性元件的磁力,并提升精准度。
[1272]
请参阅图102,本公开一实施例的一光学元件驱动机构9
‑
om可装设于一电子装置9
‑
1内,用以照相或摄影,其中前述电子装置9
‑
1例如可为智能手机或是数字相机,但本公开不限于此。应注意的是,图102中所示的光学元件驱动机构9
‑
om与电子装置9
‑
1的位置及大小关仅为一示例,而非限制光学元件驱动机构9
‑
om与电子装置9
‑
1的位置及大小关系。实际上,光学元件驱动机构9
‑
om可根据不同的需求而装设在电子装置9
‑
1中的不同位置。
[1273]
请参阅图103,光学元件驱动机构9
‑
om承载一光学元件9
‑
oe。光学元件驱动机构9
‑
om的内部或外部可设置有一感光模块。感光模块可以位于光学元件驱动机构9
‑
om的光入射处的下游。一光线9
‑
l沿一光轴9
‑
oa入射到光学元件驱动机构9
‑
om中的光学元件9
‑
oe后,抵达感光模块以进行成像。
[1274]
请参阅图104到图106,光学元件驱动机构9
‑
om可以包括一固定部9
‑
10、一活动部9
‑
20、一驱动组件9
‑
30、一弹性组件9
‑
40、一电路组件9
‑
50、一电路构件9
‑
60以及一接着元件9
‑
70。驱动组件9
‑
30可以驱动活动部9
‑
20相对于固定部9
‑
10运动。
[1275]
在本实施例中,固定部9
‑
10可以包括一第一外框9
‑
11、一第二外框9
‑
12、一底座9
‑
13、一底板9
‑
14以及四个防撞元件9
‑
15。活动部9
‑
20可以包括一光学元件承载座9
‑
21。驱动组件9
‑
30可以包括一驱动线圈9
‑
31以及一驱动磁性元件9
‑
32。弹性组件9
‑
40可以包括一第一弹性元件9
‑
41以及一第二弹性元件9
‑
42。电路组件9
‑
50可以包括一电路组件凹部9
‑
51、一电路组件连接部9
‑
52以及一电路组件开口9
‑
53。电路构件9
‑
60可以包括一电路构件连接部9
‑
61。
[1276]
活动部9
‑
20接触并连接到光学元件9
‑
oe。具体地说,活动部9
‑
20的光学元件承载座9
‑
21承载并连接到光学元件9
‑
oe。光学元件承载座9
‑
21可以具有任何合适于承载并连接到光学元件9
‑
oe的形状。
[1277]
请参考图107到图109,驱动组件9
‑
30的驱动线圈9
‑
31对应于驱动磁性元件9
‑
32。驱动线圈9
‑
31可通过与驱动磁性元件9
‑
32的磁场产生作用,并产生电磁驱动力以驱使活动部9
‑
20的光学元件承载座9
‑
21和光学元件9
‑
oe相对于固定部9
‑
10运动。
[1278]
弹性组件9
‑
40可以将活动部9
‑
20的光学元件承载座9
‑
21连接到固定部9
‑
10。详细地说,弹性组件9
‑
40的第一弹性元件9
‑
41可以将光学元件承载座9
‑
21的上部连接到第一外框9
‑
11。弹性组件9
‑
40的第二弹性元件9
‑
42可以将光学元件承载座9
‑
21的下部连接到底座9
‑
13,以悬吊光学元件承载座9
‑
21及光学元件9
‑
oe,并使光学元件承载座9
‑
21及光学元件9
‑
oe可以相对于固定部9
‑
10运动。
[1279]
请继续参阅图104到图106,第二外框9
‑
12可以包括一第二外框顶面9
‑
121以及四个第二外框侧壁9
‑
122。第二外框顶面9
‑
121不平行于光轴9
‑
oa。第二外框侧壁9
‑
122平行于光轴9
‑
oa,且从第二外框顶面9
‑
121沿着光轴9
‑
oa延伸。底板9
‑
14具有一板状结构,使得第二外框9
‑
12可以放置在底板9
‑
14上,而且底座9
‑
13也可以放置在底板9
‑
14上。
[1280]
固定部9
‑
10的第二外框9
‑
12和底板9
‑
14可以共同形成一内部空间,以容纳光学元
件驱动机构9
‑
om的其他元件。举例来说,第二外框9
‑
12可以围绕第一外框9
‑
11。更详细地说,第二外框9
‑
12和底板9
‑
14可以围绕第一外框9
‑
11及底座9
‑
13。
[1281]
如图105及图107所示,在本实施例中,固定部9
‑
10的第一外框9
‑
11可以包括一第一外框顶面9
‑
111、八个第一侧壁9
‑
112、四个第二侧壁9
‑
113、四个第一开口9
‑
114、两个第一外框凹部9
‑
115、两个第二开口9
‑
116、三个第三开口9
‑
117。第一外框顶面9
‑
111不平行于光轴9
‑
oa。第一侧壁9
‑
112及第二侧壁9
‑
113平行于光轴9
‑
oa,且从第一外框顶面9
‑
111沿着光轴9
‑
oa延伸。
[1282]
在本实施例中,每个第二侧壁9
‑
113都有与其对应的两个第一侧壁9
‑
112。更详细地说,在本实施例中,每个第二侧壁9
‑
113的两端可以连接有两个第一侧壁9
‑
112,且两个第一侧壁9
‑
112平行于其所对应(连接)的第二侧壁9
‑
113。而且,每个第二侧壁9
‑
113及对应的两个第一侧壁9
‑
112又对应于一个第二外框9
‑
12的第二外框侧壁9
‑
122。
[1283]
请参阅图109,换句话说,第一侧壁9
‑
112可以视作为从第二侧壁9
‑
113内缩。也就是说,第一侧壁9
‑
112与第二外框9
‑
12的第二外框侧壁9
‑
122的一最短距离9
‑
s1大于第二侧壁9
‑
113与第二外框9
‑
12的第二外框侧壁9
‑
122的一最短距离9
‑
s2。前述的配置可以强化第一外框9
‑
11,并且使得第一外框9
‑
11可以更佳地连接到底座9
‑
13(下方有更详细的描述)。
[1284]
如图110所示,底座9
‑
13具有一板状结构,且底座9
‑
12不平行于光轴9
‑
o。底座9
‑
13可以包括一底座本体9
‑
131、四个底座延伸部9
‑
132、至少一底座柱9
‑
133、一底座凹槽9
‑
134以及一底座壁9
‑
135。四个底座延伸部9
‑
132分别位于底座本体9
‑
131的四个不同角落。底座延伸部9
‑
132可以包括一台阶9
‑
132a以及一台阶壁9
‑
132b。台阶9
‑
132a可以坐落在底座本体9
‑
131上,而台阶壁9
‑
132b可以从台阶9
‑
132a延伸。底座壁9
‑
135可以具有一底座壁凹凸结构9
‑
135a(可以参考图108)。
[1285]
第一外框9
‑
11的第一侧壁9
‑
112可以放置在底座延伸部9
‑
132上,使得沿着光轴9
‑
oa观察时,第一外框9
‑
11位于底座延伸部9
‑
132的台阶壁9
‑
132b及活动部9
‑
20的光学元件承载座9
‑
21之间(可参考图105及图108)。沿着光轴9
‑
oa观察时,第一侧壁9
‑
112与底座延伸部9
‑
132重叠。沿着垂直于光轴9
‑
oa的一第一方向9
‑
d1观察时,第一侧壁9
‑
112与底座延伸部9
‑
132重叠。沿着垂直于9
‑
oa及第一方向9
‑
d1的一第二方向9
‑
d2观察时,第一侧壁9
‑
112与底座延伸部9
‑
132重叠。如此一来,可以使得第一外框9
‑
11更为稳定且不易相对于底座9
‑
13滑动。
[1286]
请参阅图109及图110,弹性组件9
‑
40的第二弹性元件9
‑
42设置于底座延伸部9
‑
132上,且弹性组件9
‑
40的第二弹性元件9
‑
42暴露于第一外框9
‑
11。也就是说,沿着光轴9
‑
oa观察时,第二弹性元件9
‑
42并未被第一外框9
‑
11所遮蔽。如此一来,可以提升光学元件驱动机构9
‑
om的散热效率,并且可以使得光学元件驱动机构9
‑
om更容易加工及组装。
[1287]
请参阅图110及图111,第一外框9
‑
11的四个第一开口9
‑
114设置于第一外框9
‑
11的第一外框顶面9
‑
111上。更具体地说,四个第一开口9
‑
114可以分别设置在第一外框顶面9
‑
111的四个角落处。防撞元件9
‑
15设置于第一外框9
‑
11的第一外框顶面9
‑
111上。更具体地说,四个防撞元件9
‑
15可以分别设置在第一外框顶面9
‑
111的四个角落处。
[1288]
请参考图109到图111,在一实施例中,每个第一开口9
‑
114容纳有对应的防撞元件9
‑
15。防撞元件9
‑
15贯穿第一开口9
‑
114。沿着光轴9
‑
oa观察时,防撞元件9
‑
15与第一开口9
‑
114重叠。沿着第一方向9
‑
d1观察时,防撞元件9
‑
15与第一开口9
‑
114重叠。沿着第二方向
9
‑
d2观察时,防撞元件9
‑
15与第一开口9
‑
114重叠。
[1289]
防撞元件9
‑
15延伸超过第一外框9
‑
11的第一外框顶面9
‑
111。也就是说,防撞元件9
‑
15比第一外框顶面9
‑
111还要高,而且防撞元件9
‑
15比第一外框顶面9
‑
111更接近第二外框9
‑
12的第二外框顶面9
‑
121。也就是说,沿着第一方向9
‑
d1观察时,防撞元件9
‑
15与第二外框9
‑
12的第二外框顶面9
‑
121的一最短距离9
‑
s3小于第一外框9
‑
11的第一外框顶面9
‑
111与第二外框9
‑
12的第二外框顶面9
‑
121的一最短距离9
‑
s4。
[1290]
如图112所示,在一实施例中,第一外框9
‑
11可以不具有第一开口9
‑
114。防撞元件9
‑
15可以围绕第一外框顶面9
‑
111的外周、第一侧壁9
‑
112的上部的外周及第二侧壁9
‑
113的上部的外周。
[1291]
如图113所示,在一实施例中,第一外框9
‑
11可以不具有第一开口9
‑
114。防撞元件9
‑
15可以围绕部分的第一外框顶面9
‑
111的外周、第一侧壁9
‑
112的上部的外周及部分的第二侧壁9
‑
113的上部的外周。
[1292]
如图114所示,在一实施例中,第一外框9
‑
11可以不具有第一开口9
‑
114。防撞元件9
‑
15可以设置在第一外框顶面9
‑
111上,并且大致上沿着第一方向9
‑
d1或第二方向9
‑
d2延伸。
[1293]
在一实施例中,第一外框9
‑
11及第二外框9
‑
12可以由金属所构成,而防撞元件9
‑
15可以是树脂或胶水等材质。在一实施例中,第一外框9
‑
11及第二外框9
‑
12可以由金属所构成,而防撞元件9
‑
15可以是塑胶等材质。在一实施例中,第一外框9
‑
11及第二外框9
‑
12可以由塑胶所构成,而防撞元件9
‑
15可以是其他塑胶、树脂或胶水等材质。
[1294]
前述的配置可以避免第一外框顶面9
‑
111直接接触第二外框顶面9
‑
121,进而避免第一外框顶面9
‑
111直接接触第二外框顶面9
‑
121的损伤,还可以避免产生碎片。而且,前述的配置还可以降低光学元件驱动机构9
‑
om受到冲击时所产生的声音。
[1295]
请参阅图115,底座柱9
‑
133从底座本体9
‑
131沿着光轴9
‑
oa延伸,而电路组件9
‑
50沿着第一方向9
‑
d1延伸(请参考图107图107)。底座柱9
‑
133连接至电路组件9
‑
50。沿着第一方向9
‑
d1观察时,底座柱9
‑
133与电路组件9
‑
50不重叠。电路构件9
‑
60设置在底座9
‑
13中。详细地说,电路构件9
‑
60可以是埋入式射出成型(insert molding)在底座9
‑
13中。电路构件9
‑
60的电路构件连接部9
‑
61沿着光轴9
‑
oa延伸,且电路构件连接部9
‑
61电性连接并直接接触电路组件9
‑
50(图未示)。前述的配置可以使得光学元件驱动机构9
‑
om小型化。
[1296]
请参阅图116,电路组件连接部9
‑
52包括一第一表面9
‑
521、一第二表面9
‑
522以及一第三表面9
‑
523。第一表面9
‑
521平行于第二表面9
‑
522,第三表面9
‑
523直接连接第一表面9
‑
521及第二表面9
‑
522,且第一表面9
‑
521、第二表面9
‑
522及第三表面9
‑
523中的至少一者电性连接至电路构件连接部9
‑
61(未表示在图中)。
[1297]
底座柱9
‑
133可以包括一底座柱凹槽9
‑
133a。沿着第二方向9
‑
d2观察时,第一外框9
‑
11的第二开口9
‑
116、电路组件开口9
‑
53及底座柱凹槽9
‑
133a彼此重叠。
[1298]
沿着第一方向9
‑
d1观察时,第一外框9
‑
11的第二开口9
‑
116的一尺寸大于电路组件开口9
‑
53的一尺寸,且电路组件开口9
‑
53的尺寸大于底座柱凹槽9
‑
133a的一尺寸。
[1299]
换句话说,沿着第一方向9
‑
d1观察时,第一外框9
‑
11的第二开口9
‑
116的尺寸大于底座柱凹槽9
‑
133a的尺寸,且底座柱凹槽9
‑
133a的尺寸小于电路组件开口9
‑
53的尺寸。
[1300]
而且,第一外框9
‑
11的第二开口9
‑
116、电路组件开口9
‑
53及底座柱凹槽9
‑
133a可
以容纳有接着元件9
‑
70。如此一来,可以使得光学元件驱动机构9
‑
om更容易加工及组装。
[1301]
请参阅图117,沿着第一方向9
‑
d1观察时,接着元件9
‑
70、电路组件9
‑
50及底座凹槽9
‑
134彼此重叠。电路组件凹部9
‑
51可以容纳有接着元件9
‑
70。电路组件连接部9
‑
52暴露于第一外框凹部9
‑
115,且第一外框凹部9
‑
115容纳有接着元件9
‑
70(可以参考图105)。
[1302]
请参阅图118,底座壁9
‑
135及底座壁凹凸结构9
‑
135a可以面对第一外框9
‑
11的第二侧壁9
‑
113,且在底座壁9
‑
135及第二侧壁9
‑
113之间可以设置有接着元件9
‑
70,以固定底座壁9
‑
135及第二侧壁9
‑
113。
[1303]
沿着第二方向9
‑
d2观察时,底座壁凹凸结构9
‑
135a的一部分暴露于第三开口9
‑
117,且第三开口9
‑
117容纳有接着元件9
‑
70。而且,沿着光轴9
‑
oa观察时,第三开口9
‑
117与接着元件9
‑
70重叠。如此一来,可以使得光学元件驱动机构9
‑
om更容易加工及组装。
[1304]
总的来说,本公开实施例的光学元件驱动机构9
‑
om可以降低光学元件驱动机构9
‑
om受到冲击时所产生的声音及避免产生碎片,并且可以使得光学元件驱动机构9
‑
om小型化。本公开实施例的光学元件驱动机构9
‑
om的配置使得光学元件驱动机构9
‑
om容易加工及组装。
[1305]
请参考图119、图120a、图120b、图120c,其中图119是根据本发明一些实施例所示出的光学元件驱动机构10
‑
100的立体图,图120a是光学元件驱动机构10
‑
100的爆炸图,图120b是光学元件驱动机构10
‑
100的剖面图,图120c是图120b的放大图。
[1306]
如图119至图120c所示,在本实施例中,上述光学元件驱动机构10
‑
100主要包括有一外框10
‑
10、一底座10
‑
20、一承载座10
‑
30、一第五线圈10
‑
40、一框架10
‑
50、多个磁性元件10
‑
60、一上弹性元件10
‑
70(包括第一弹性元件10
‑
70a、第二弹性元件10
‑
70b、第三弹性元件10
‑
70c、第四弹性元件10
‑
70d)、一第五弹性元件10
‑
74、一第六弹性元件10
‑
72、电路板10
‑
80。在电路板10
‑
80中可埋设有驱动线圈10
‑
82以及电路组件10
‑
84,而在底座10
‑
20下方可设置控制元件10
‑
86。
[1307]
光学元件驱动机构10
‑
100可用以驱动光学元件10
‑
5进行运动,以达成自动对焦(af)或光学防手震(ois)的效果。外框10
‑
10以及底座10
‑
20可合称为固定部10
‑
f,而承载座10
‑
30以及框架10
‑
50可合称为活动部10
‑
m。活动部10
‑
m活动地连接固定部10
‑
f,亦即活动部10
‑
m可相对于固定部10
‑
f进行移动。再者,第五线圈10
‑
40以及磁性元件10
‑
60可合称为驱动组件10
‑
d,其用以驱动活动部10
‑
m相对于固定部10
‑
f进行移动。上弹性元件10
‑
70、第五弹性元件10
‑
74、第六弹性元件10
‑
72可合称为弹性组件10
‑
r,活动部10
‑
m经由弹性组件10
‑
r活动地连接固定部10
‑
f。
[1308]
外框10
‑
10具有顶面10
‑
10a以及由顶面10
‑
10a边缘延伸的侧壁10
‑
10b,而外框10
‑
10与底座10
‑
20沿着主轴10
‑
o的方向(z方向)排列。前述外框10
‑
10与底座10
‑
20可相互结合而构成光学元件驱动机构10
‑
100的外壳。举例来说,底座10
‑
20可固定地连接外框10
‑
10。应了解的是,外框10
‑
10及底座10
‑
20上分别形成有外框开口及底座开口,其中外框开口的中心对应于光学元件10
‑
5的主轴10
‑
o,底座开口则对应于设置在光学元件驱动机构10
‑
100之外的图像感测元件(图未示);据此,设置于光学元件驱动机构10
‑
100中的光学元件10
‑
5可在主轴10
‑
o方向与图像感测元件进行对焦。
[1309]
前述承载座10
‑
30具有一贯穿孔,光学元件10
‑
5可固定于此贯穿孔内,而前述第五线圈10
‑
40则设置于承载座10
‑
30的外侧表面。磁性元件10
‑
60可固定于框架10
‑
50上或可相
对于框架10
‑
50移动。应了解的是,通过磁性元件10
‑
60与第五线圈10
‑
40之间的作用,可产生磁力迫使承载座10
‑
30相对于框架10
‑
50沿主轴10
‑
o方向移动,进而达到快速对焦的效果。
[1310]
在本实施例中,承载座10
‑
30及其内的光学元件10
‑
5活动地(movably)设置于框架10
‑
50内。更具体而言,承载座10
‑
30可通过金属材质的上弹性元件10
‑
70及第六弹性元件10
‑
72连接框架10
‑
50并悬吊于框架10
‑
50内。当前述第五线圈10
‑
40通电时,第五线圈10
‑
40会和磁性元件10
‑
60的磁场产生作用,并产生一电磁驱动力(electromagnetic force)以驱使承载座10
‑
30和前述光学元件10
‑
5相对于框架10
‑
50沿主轴10
‑
o方向移动,以达到自动对焦的效果。此外,活动部10
‑
m亦可经由第五弹性元件10
‑
74活动地连接固定部10
‑
f。
[1311]
在一些实施例中,底座10
‑
20上的电路组件10
‑
84可电性连接设置于光学元件驱动机构10
‑
100内部或外部的其他电子元件,用以执行自动对焦(af)及光学防手震(ois)等功能。组装时可利用焊接(soldering)或激光熔接(laser welding)的方式,使第六弹性元件10
‑
72和底座10
‑
20上的电路组件10
‑
84结合,从而使得第五线圈10
‑
40可以电性连接到外部的电路。
[1312]
此外,在一些实施例中,底座10
‑
20中埋设的驱动线圈10
‑
82可用以与磁性元件10
‑
60产生作用,以驱使承载座10
‑
30进行移动。第五线圈10
‑
40以及底座10
‑
20中的驱动线圈10
‑
82与磁性元件10
‑
60作用时,可分别产生不同方向的驱动力,以执行自动对焦(af)及/或光学防手震(ois)等功能。
[1313]
图121是光学元件驱动机构10
‑
100中设置有光学元件10
‑
5时的俯视图。光学元件驱动机构10
‑
100的承载座10
‑
30可具有多个内凹部10
‑
32,而光学元件10
‑
5可具有多个凸出部10
‑
5a,且凸出部10
‑
5a可设置于内凹部10
‑
32之中,以固定光学元件10
‑
5相对于承载座10
‑
30的位置。
[1314]
图122是光学元件驱动机构10
‑
100的仰视图,图123a是光学元件驱动机构10
‑
100的立体图,而图123b是图123a的放大图。前述控制元件10
‑
86可包括第一控制元件10
‑
86a以及第二控制元件10
‑
86b,设置在底座10
‑
20凹槽10
‑
22中,并且露出于底座10
‑
20。在一些实施例中,请回头参照图120c,控制元件10
‑
86的底表面10
‑
87不超出底座10
‑
20的底表面10
‑
21,即凹槽10
‑
22的深度可大于控制元件10
‑
86的厚度,以保护控制元件10
‑
86免于受到外界冲击而发生损坏。
[1315]
第一控制元件10
‑
86a以及第二控制元件10
‑
86b例如可分别用以控制驱动组件10
‑
d中的不同元件,以允许光学元件10
‑
5在不同方向上进行运动,并且通过使用不同的控制元件10
‑
86来控制光学元件10
‑
5的运动,可避免各方向上的指令互相干扰,而提升控制驱动组件10
‑
d时的精确度。
[1316]
在一些实施例中,埋设在电路板10
‑
80中的一部分电路组件10
‑
84可露出于电路板10
‑
80以及底座10
‑
20。举例来说,如图122、图123a、图123b所示,电路组件10
‑
84可包括露出于底座10
‑
20的接地元件10
‑
88a以及接地元件10
‑
88b。接地元件10
‑
88a以及接地元件10
‑
88b可分别通过第一电性接点10
‑
c1、第二电性接点10
‑
c2电性连接外框10
‑
10以及第五弹性元件10
‑
74,以将光学元件驱动机构10
‑
100接地。在一些实施例中,接地元件10
‑
88a、接地元件10
‑
88b与外框10
‑
10可包括金属的材质(例如不锈钢等),或者亦可将接地元件10
‑
88a、接地元件10
‑
88b与外框10
‑
10设计成由相同的材料所形成,以促进其连接。
[1317]
沿着主轴10
‑
o的方向观察时,固定部10
‑
f具有多边形的结构(例如矩形),而第一电性接点10
‑
c1、第二电性接点10
‑
c2可位于固定部10
‑
f的角落,且主轴10
‑
o可位于第一电性接点10
‑
c1、第二电性接点10
‑
c2之间,例如第一电性接点10
‑
c1与第二电性接点10
‑
c2的连线可通过主轴10
‑
o,以隔开第一电性接点10
‑
c1与第二电性接点10
‑
c2,可使当其中一个电性接点若受到冲击发生损坏时,另一个电性接点仍可发挥接地的功能,以增加光学元件驱动机构10
‑
100的耐用性。
[1318]
图124a是光学元件驱动机构10
‑
100省略外框10
‑
10的俯视图,而图124b是图124a的放大图,图125是光学元件驱动机构10
‑
100省略外框10
‑
10的立体图。其中上弹性元件10
‑
70可包括多个分开的不同部分,例如图124a中所示的第一弹性元件10
‑
70a、第二弹性元件10
‑
70b、第三弹性元件10
‑
70c、第四弹性元件10
‑
70d,分别连接第五弹性元件10
‑
74a、10
‑
74b、10
‑
74c、10
‑
74d。承载座10
‑
30可经由上弹性元件10
‑
70(包括第一弹性元件10
‑
70a、第二弹性元件10
‑
70b、第三弹性元件10
‑
70c、第四弹性元件10
‑
70d)活动地连接活动部10
‑
m的框架10
‑
50。第一弹性元件10
‑
70a、第二弹性元件10
‑
70b、第三弹性元件10
‑
70c、第四弹性元件10
‑
70d具有板状的结构,第一弹性元件10
‑
70a、第三弹性元件10
‑
70c分别通过第五弹性元件10
‑
74a、10
‑
74c与接地元件10
‑
88a、10
‑
88b电性连接,而第二弹性元件10
‑
70b、第四弹性元件10
‑
70d分别通过第五弹性元件10
‑
74b、10
‑
74d与驱动组件10
‑
d电性连接。通过将传递不同信号的线路分隔,可避免各信号之间发生干扰。
[1319]
在一些实施例中,沿着主轴10
‑
o的方向(z方向)观察时,第一弹性元件10
‑
70a、第三弹性元件10
‑
70c分别位于主轴10
‑
o的两侧,而第二弹性元件10
‑
70b、第四弹性元件10
‑
70d亦分别位于主轴10
‑
o的两侧。在一些实施例中,第五弹性元件10
‑
74可具有长条形的结构,并且第五弹性元件10
‑
74的延伸方向可与第一弹性元件10
‑
70a、第二弹性元件10
‑
70b、第三弹性元件10
‑
70c、或第四弹性元件10
‑
70d的厚度方向(z方向)平行,以允许活动部10
‑
m活动地设置于固定部10
‑
f中。
[1320]
图126a是光学元件驱动机构10
‑
100省略外框10
‑
10、框架10
‑
50、上弹性元件10
‑
70的立体图,而图126b是图126a的放大图。承载座10
‑
30上可具有一凹陷结构10
‑
34,可在凹陷结构10
‑
34中填入粘着材料(例如粘胶),以让承载座10
‑
30固定地连接第一弹性元件10
‑
70a、第二弹性元件10
‑
70b、第三弹性元件10
‑
70c、第四弹性元件10
‑
70d。
[1321]
图127是凹陷结构10
‑
34的示意图。在一些实施例中,凹陷结构10
‑
34中可具有凸出结构10
‑
35、凸出结构10
‑
36,其中凹陷结构10
‑
34中的凸出结构10
‑
35、凸出结构10
‑
36以虚线示出。在一些实施例中,凹陷结构10
‑
34可具有深度10
‑
h1,而凸出结构10
‑
35、凸出结构10
‑
36分别可具有高度10
‑
h2、高度10
‑
h3,其中深度10
‑
h1大于高度10
‑
h2、高度10
‑
h3。换句话说,凸出结构10
‑
35、凸出结构10
‑
36低于凹陷结构10
‑
34。凸出结构10
‑
35、凸出结构10
‑
36可用以增加凹陷结构10
‑
34的表面积,以允许填在凹陷结构10
‑
34中的粘着材料进一步与凹陷结构10
‑
34黏接。在一些实施例中,高度10
‑
h3小于高度10
‑
h2,以增加设计弹性。
[1322]
图128是光学元件驱动机构10
‑
100省略外框10
‑
10、框架10
‑
50、上弹性元件10
‑
70的俯视图,而图129是底座10
‑
20以及电路板10
‑
80的俯视图。请一并参照图128以及图129,驱动组件10
‑
d中的磁性元件10
‑
60可包括第一磁性元件10
‑
60a、第二磁性元件10
‑
60b、第三磁性元件10
‑
60c、第四磁性元件10
‑
60d,而驱动组件10
‑
d中埋设在电路板10
‑
80中的驱动线圈10
‑
82可包括第一线圈10
‑
82a、第二线圈10
‑
82b、第三线圈10
‑
82c、第四线圈10
‑
82d。第一
线圈10
‑
82a、第二线圈10
‑
82b、第三线圈10
‑
82c、第四线圈10
‑
82d分别可对应于第一磁性10
‑
60a元件、第二磁性元件10
‑
60b、第三磁性元件10
‑
60c、第四磁性元件10
‑
60d(例如在z方向上部分重叠),并且第一线圈10
‑
82a、第三线圈10
‑
82c可用以驱动活动部10
‑
m相对于固定部10
‑
f在第一维度上运动(例如在y方向上运动),而第二线圈10
‑
82b、第四线圈10
‑
82d可用以驱动活动部10
‑
m相对于固定部10
‑
f在第二维度上运动(例如在x方向上运动),以达到光学防手震的效果。
[1323]
图130a是底座10
‑
20以及底座10
‑
20中的电路组件10
‑
84的示意图,图130b是电路组件10
‑
84和控制元件10
‑
86的示意图,图130c以及图130d分别是第一线圈10
‑
82a、第三线圈10
‑
82c以及第二线圈10
‑
82b、第四线圈10
‑
82d与电路组件10
‑
84的一些元件进行电性连接时的示意图,其中为了简洁而省略了一些元件。如图130a所示,底座10
‑
20可具有第一侧边10
‑
s1以及第二侧边10
‑
s2,第一侧边10
‑
s1沿着第一方向(y方向)延伸,而第二侧边10
‑
s2沿着第二方向(x方向)延伸,其中第一方向与第二方向不同。沿着主轴10
‑
o的方向观察时,第一假想线10
‑
v1穿过主轴10
‑
o以及第一控制元件10
‑
86a,且第一假想线10
‑
v1与第一方向(y方向)平行。此外,第二假想线10
‑
v2穿过主轴10
‑
o以及第二控制元件10
‑
86b,第二假想线10
‑
v2与第二方向(x方向)平行。第一假想线10
‑
v1以及第二假想线10
‑
v2可将底座10
‑
20分成四个象限(第一象限10
‑
q1、第二象限10
‑
q2、第三象限10
‑
q3、第四象限10
‑
q4)。
[1324]
除了前述接地元件10
‑
88a以及接地元件10
‑
88b以外,电路组件10
‑
84还可包括多个电路端子,例如第一电路端子10
‑
84a、第二电路端子10
‑
84b、第三电路端子10
‑
84c、第四电路端子10
‑
84d、第五电路端子10
‑
84e、第六电路端子10
‑
84f。第一电路端子10
‑
84a可通过第五弹性元件10
‑
74b、第五弹性元件10
‑
74d连接第二弹性元件10
‑
70b、第四弹性元件10
‑
70d,以将第五线圈10
‑
40电性连接至一外部电路(未示出)。第二电路端子10
‑
84b、第三电路端子10
‑
84c可电性连接到第一控制元件10
‑
86a,第四电路端子10
‑
84d、第五电路端子10
‑
84e可电性连接到第二控制元件10
‑
86b。
[1325]
第一控制元件10
‑
86a可经由第二电路端子10
‑
82b电性连接至外部电路,而第二控制元件10
‑
86b可经由第四电路端子10
‑
82d电性连接至外部电路,以通过外部电路对第一控制元件10
‑
86a、第二控制元件10
‑
86b提供控制信号以及电力。
[1326]
如图130b所示,第六电路端子10
‑
84f可位在接地元件10
‑
88a上。详细来说,接地元件10
‑
88a可包括延伸部10
‑
88a1、延伸部10
‑
88a2以及孔洞10
‑
88a3。延伸部10
‑
88a1可用以连接外框10
‑
10,延伸部10
‑
88a2可用以连接第六电路端子10
‑
84f,前述第五弹性元件10
‑
74c可通过孔洞10
‑
88a3来连接接地元件10
‑
88a。此外,在一些实施例中,接地元件10
‑
88b可包括延伸部10
‑
88b1以及孔洞10
‑
88b3。延伸部10
‑
88b1可用以连接外框10
‑
10,前述第五弹性元件10
‑
74a可通过孔洞10
‑
88b3来连接接地元件10
‑
88b。由此,以允许外框10
‑
10通过接地元件10
‑
88a以及接地元件10
‑
88b进行接地。
[1327]
如图130c以及图130d所示,第一控制元件10
‑
86a可通过第三电路端子10
‑
84c来电性连接第一线圈10
‑
82a、第三线圈10
‑
82c以控制第一线圈10
‑
82a、第三线圈10
‑
82c,而第二控制元件10
‑
86b可通过第四电路端子10
‑
84d来电性连接第二线圈10
‑
82b、第三线圈10
‑
82d以控制第二线圈10
‑
82b、第四线圈10
‑
82d。第一线圈10
‑
82a可具有一延伸线路10
‑
89a,延伸到第三电路端子10
‑
84c上的第三电性接点10
‑
c3,以允许第一线圈10
‑
82a经由第三电性接点10
‑
c3电性连接电路组件10
‑
84。第二线圈10
‑
82b可具有一延伸线路10
‑
89b,延伸到第四
电路端子10
‑
84d上的第四电性接点10
‑
c4,以允许第二线圈10
‑
82b经由第四电性接点10
‑
c4电性连接电路组件10
‑
84。第三线圈10
‑
82c可具有一延伸线路10
‑
89c,延伸到第三电路端子10
‑
84c上的第五电性接点10
‑
c5,以允许第三线圈10
‑
82c经由第五电性接点10
‑
c5电性连接电路组件10
‑
84。第四线圈10
‑
82d可具有一延伸线路10
‑
89d,延伸到第四电路端子10
‑
84d上的第六电性接点10
‑
c6,以允许第四线圈10
‑
82d经由第六电性接点10
‑
c6电性连接电路组件10
‑
84。
[1328]
如图130c所示,沿着主轴10
‑
o的方向观察时,主轴10
‑
o位于第一线圈10
‑
86a、第三线圈10
‑
86c之间,而第三电性接点10
‑
c3、第五电性接点10
‑
c5位于固定部10
‑
f的相邻的不同角落,例如可位在相邻的两个不同象限,如图130c中的第二象限10
‑
q2以及第三象限10
‑
q3。此外,如图130d所示,主轴10
‑
o亦位于第二线圈10
‑
86b、第四线圈10
‑
86d之间,而第四电性接点10
‑
c4、第六电性接点10
‑
c6亦位于固定部10
‑
f的相邻的不同角落,例如可位在图130d中的第一象限10
‑
q1以及第四象限10
‑
q4。换句话说,第三电性接点10
‑
c3、第四电性接点10
‑
c4、第五电性接点10
‑
c5、第六电性接点10
‑
c6皆位在不同的象限中,从而可分散各电性接点之间的距离,以防止在组合时互相干扰。
[1329]
此外,第一线圈10
‑
82a以及第三线圈10
‑
82c可通过延伸线路10
‑
89e电性连接,以允许第一控制元件10
‑
86a同时控制第一线圈10
‑
82a以及第三线圈10
‑
82c。此外,第二线圈10
‑
82b以及第四线圈10
‑
82d可通过延伸线路10
‑
89f电性连接,以允许第二控制元件10
‑
86b同时控制第二线圈10
‑
82b以及第四线圈10
‑
82d。
[1330]
在一些实施例中,如图130b所示,在第一方向(y方向)或第二方向(x方向)上,前述端子中两两相邻的电路端子(第一电路端子10
‑
84a、第二电路端子10
‑
84b、第三电路端子10
‑
84c、第四电路端子10
‑
84d、第五电路端子10
‑
84e)的间距可互相不同。举例来说,在y方向上,两个第三电路端子10
‑
84c之间的距离大于两个第二电路端子10
‑
84b之间的距离。此外,至少部分的电路端子(第一电路端子10
‑
84a、第二电路端子10
‑
84b、第三电路端子10
‑
84c、第四电路端子10
‑
84d、第五电路端子10
‑
84e)可沿第一方向或第二方向排列。举例来说,在图130b中的第一象限10
‑
q1中,第二电路端子10
‑
84b、第五电路端子10
‑
84e可在y方向上排列,而在第二象限10
‑
q2中,第一电路端子10
‑
84a以及第二电路端子10
‑
84b可在y方向上排列。在一些实施例中,沿着主轴10
‑
o的方向观察,第一假想线10
‑
v1或者第二假想线10
‑
v2与第一电路端子10
‑
84a、第二电路端子10
‑
84b、第三电路端子10
‑
84c、第四电路端子10
‑
84d、第五电路端子10
‑
84e不重叠(即不通过任何电路端子),以增加控制元件10
‑
86与各电路端子之间的距离,而避免发生干扰。
[1331]
图131a以及图131b分别是第一控制元件10
‑
86a以及第二控制元件10
‑
86b的示意图。第一控制元件10
‑
86a可用以输出第一控制信号,第二控制元件10
‑
86b可用以输出第二控制信号,从而控制驱动组件10
‑
d。
[1332]
如图131a所示,第一控制元件10
‑
86a包括第一感测单元10
‑
86a1、第一记忆单元10
‑
86a2以及第一控制单元10
‑
86a3,设置在第一控制元件10
‑
86a中并彼此电性连接。第一感测单元10
‑
86a1可用以感测活动部10
‑
m相对固定部10
‑
f的运动,并输出第一感测信号。第一记忆单元10
‑
86a2可包括纪录着驱动组件10
‑
d特性的第一预设信息,例如第一预设信息可包括第一感测信号与活动部10
‑
m相对固定部10
‑
f的位置关系。第一预设信息可经由一外部设备(未示出)测量而得,例如可在使用前对光学元件驱动机构10
‑
100进行校正,并将校
正后的信息写入第一预设信息。此外部设备不设置在光学元件驱动机构10
‑
100中。第一控制单元10
‑
86a3可根据第一感测信号及/或第一预设信息来输出前述第一控制信号。由此,可达成闭回路(close
‑
loop)控制,以精确地控制光学元件驱动机构10
‑
100。
[1333]
如图131b所示,第二控制元件10
‑
86b包括第二感测单元10
‑
86b1、第二记忆单元10
‑
86b2以及第二控制单元10
‑
86b3,设置在第二控制元件10
‑
86b中并彼此电性连接。第二感测单元10
‑
86b1可用以感测活动部10
‑
m相对固定部10
‑
f的运动,并输出第二感测信号。第二记忆单元10
‑
86b2可包括纪录着驱动组件10
‑
d特性的第二预设信息,例如第二预设信息可包括第二感测信号与活动部10
‑
m相对固定部10
‑
f的位置关系。第二预设信息可经由前述外部设备(未示出)测量而得,例如可在使用前对光学元件驱动机构10
‑
100进行校正,并将校正后的信息写入第二预设信息。此外部设备不设置在光学元件驱动机构10
‑
100中。第二控制单元10
‑
86b3可根据第二感测信号及/或第二预设信息来输出前述第二控制信号。由此,可达成闭回路控制,以精确地控制光学元件驱动机构10
‑
100。
[1334]
通过使用第一控制元件10
‑
86a以及第二控制元件10
‑
86b,可分别控制光学元件驱动机构10
‑
100,以使光学元件10
‑
5在两个不同的维度上进行运动。举例来说,第一控制元件10
‑
86a可用以控制光学元件10
‑
5在y方向上的运动,而第二控制元件10
‑
86b可用以控制光学元件10
‑
5在x方向上的运动,以避免不同的信号互相干扰。然而,本发明并不以此为限。在一些实施例中,第一控制元件10
‑
86a或第二控制元件10
‑
86b亦可用以控制光学元件10
‑
5在其他维度上的运动(例如在z方向上的运动、或者在其他方向上的转动),取决于设计需求。
[1335]
前述第一感测单元10
‑
86a1或第二感测单元10
‑
86b1可包括霍尔效应感测器(hall sensor)、磁阻效应感测器(magnetoresistance effect sensor,mr sensor)、巨磁阻效应感测器(giant magnetoresistance effect sensor,gmr sensor)、穿隧磁阻效应感测器(tunneling magnetoresistance effect sensor,tmr sensor)、或磁通量感测器(fluxgate sensor)等。
[1336]
综上所述,本发明提供一种光学元件驱动机构,包括活动部、固定部、驱动组件、电路组件。活动部用以连接光学元件。活动部可相对固定部运动。驱动组件用以驱动活动部相对固定部运动。电路组件电性连接驱动组件,电路组件包括接地元件。由此,可将用以传递不同信号的线路分隔,以避免各信号之间发生干扰,并且还可达成小型化。
[1337]
图132为本发明一实施例的光学驱动机构11
‑
1的爆炸图,图133则为图132中的光学驱动机构11
‑
1组合后并省略外壳11
‑
h的示意图。前述光学驱动机构11
‑
1例如可设置于一相机、平板电脑或手机等电子装置的内部,并可用以承载一光学元件11
‑
ls(例如镜头),且可使光学镜头相对于电子装置内的感光元件移动。当来自外界的光线进入承载光学元件11
‑
ls的光学驱动机构11
‑
1时,入射的光线沿着光轴11
‑
o穿过设置在光学驱动机构11
‑
1中的光学元件,并至一感光元件(未图示),以获取图像。如此,借以达到自动对焦(auto
‑
focusing,af)或光学防手震(optical image stabilization,ois)的目的,提升图像品质。
[1338]
图132~图135所示,光学驱动机构11
‑
1主要包括一基底11
‑
10、一活动部11
‑
20、一偏压组件11
‑
w和一外壳11
‑
h。前述基底11
‑
10的一固定本体11
‑
11(图135)与外壳11
‑
h(固定部)相互固定,且基底11
‑
10的固定本体11
‑
11与外壳11
‑
h形成有一容置空间,可供活动部11
‑
20和偏压组件11
‑
w设置,并对其作保护。此外,前述活动部11
‑
20固定于基底11
‑
10的一活动件11
‑
14(图135),前述偏压组件11
‑
w则连接基底11
‑
10的固定本体11
‑
11与活动件11
‑
14,其中偏压组件11
‑
w可驱使基底11
‑
10的活动件11
‑
14及其上方的活动部11
‑
20相对于基底11
‑
10的固定本体11
‑
11移动。以下先说明活动部11
‑
20的详细结构,而关于偏压组件11
‑
w与基底11
‑
10将于后面说明。
[1339]
活动部11
‑
20包含:一基座11
‑
21、一框架11
‑
22、一承载件11
‑
23、一上簧片11
‑
24、一下簧片11
‑
25与一驱动组件11
‑
mc。前述框架11
‑
22与承载件11
‑
23设置于基座11
‑
21上,且基座11
‑
21固定于基底11
‑
10的活动件11
‑
14上,而框架11
‑
22则围绕承载件11
‑
23。承载件11
‑
23可承载一光学元件11
‑
ls,例如镜头,光线沿光学驱动机构11
‑
1或光学元件11
‑
ls的光轴11
‑
o穿过光学元件11
‑
ls后,至一感光元件将可获取图像。
[1340]
参阅图133及图134,前述上、下簧片11
‑
24、11
‑
25设置于承载件11
‑
23的上、下两侧,连接承载件11
‑
23与基座11
‑
21。详细而言,下簧片11
‑
25设置于基座11
‑
21的主体上,而上簧片11
‑
24设置于基座11
‑
21的多个(本实施例为四个)凸柱11
‑
211上。上、下簧片11
‑
24、11
‑
25夹设承载件11
‑
23,使其活动地连基座11
‑
21。
[1341]
继续参阅图133,前述驱动组件11
‑
mc包含一线圈组件11
‑
c、一磁性组件11
‑
m与一导磁组件(permeability assembly)11
‑
v,其中线圈组件11
‑
c可包含一或多个驱动线圈,磁性组件11
‑
m可包含一或多个磁性元件(例如磁铁),导磁组件11
‑
v则可包含一或多个导磁件。线圈组件11
‑
c和磁性组件11
‑
m分别设置于承载件11
‑
23与框架11
‑
22上。详细而言,线圈组件11
‑
c与承载件11
‑
23相互固定,而磁性组件11
‑
m与上簧片11
‑
24的下表面连接(例如施加粘胶)或设置于框架11
‑
22上,并面向线圈组件11
‑
c。
[1342]
当施加适当的驱动信号(例如驱动电流)至线圈组件11
‑
c时,线圈组件11
‑
c与第一磁性元件11
‑
m之间产生一磁力,如此第一驱动组件11
‑
mc通过此磁力带动承载件11
‑
23和光学元件11
‑
ls平移或是倾斜移动,使以达光学对焦或晃动补偿的效果。此外,在施加驱动信号之前,上、下簧片11
‑
24、11
‑
25可让承载件11
‑
23相对基座11
‑
21保持在一初始位置。需要了解的是,本实施例中的驱动组件11
‑
mc为动圈式,于其他实施例中,则可为动磁式。
[1343]
此外驱动组件11
‑
mc的导磁组件11
‑
v,设置于框架11
‑
22的内侧,其可使磁性组件11
‑
m的磁力往一既定方向集中,以增强驱使承载件11
‑
23移动的磁推力,以及降低磁干扰的作用。于另一些实施例中,框架11
‑
22的内侧面或壁对应于磁性组件11
‑
m的部分可嵌入导磁组件11
‑
v,使其具有导磁材质,更可增强框架11
‑
22的机械强度。
[1344]
如此,通过驱动组件11
‑
mc带动承载件11
‑
23与设于其中的光学元件11
‑
ls一起相对于基座11
‑
21、框架11
‑
22移动,进而达到自动对焦功能,或者在光学镜头有晃动产生时,可通过前述移动机制而获得良好的补偿效果,以达防手震的目的。
[1345]
以下详细说明偏压组件11
‑
w与基底11
‑
10的详细结构。
[1346]
请参阅图132及图135,前述偏压组件11
‑
w连接基底11
‑
10的固定本体11
‑
11与活动件11
‑
14,用以驱使活动件11
‑
14及其上方的活动部11
‑
20相对于基底11
‑
10的固定本体11
‑
11移动。偏压组件11
‑
w包含至少一个偏压元件11
‑
ws,本实施例中为四个。偏压元件11
‑
ws例如为具有形状记忆合金(shape memory alloys,sma)材质的线材,并可通过一外部电源(未图示)对其施加驱动信号(例如电流)而改变其长度。举例来说,当施加驱动信号而使偏压组件11
‑
w升温时,偏压组件11
‑
w可产生形变而伸长或缩短;当停止施加驱动信号时,偏压组件11
‑
w则可恢复到原本长度。换言之,通过施加适当的驱动信号,可控制偏压组件11
‑
w的长度以使活动件11
‑
14及其上方的活动部11
‑
20(包含被承载的光学元件11
‑
ls)相对基底11
‑
10
移动,借以改变活动部11
‑
20的姿态,而使得光学驱动机构11
‑
1具有对焦、防手震或晃动补偿的功能。
[1347]
前述偏压组件11
‑
w的材质,举例而言,可包含钛镍合金(tini)、钛钯合金(tipd)、钛镍铜合金(tinicu)、钛镍钯合金(tinipd)或其组合。
[1348]
前述基底11
‑
10具有一固定本体11
‑
11、一绝缘层11
‑
12、一导电层11
‑
13与一活动件11
‑
14,其中绝缘层11
‑
12、导电层11
‑
13夹设在固定本体11
‑
11和活动件11
‑
14之间。关于绝缘层11
‑
12、导电层11
‑
13请参阅后续图137a及图137b的说明。
[1349]
参阅图135及图136,前述固定本体11
‑
11具有设置于对角处的多个(两个)固定凸部11
‑
111,而活动件11
‑
14具有设置于对角处的多个(两个)连接凸部11
‑
141。从图136可看见,固定凸部11
‑
111位于连接凸部11
‑
141位于大致成矩形结构的基底11
‑
10的四个角落,并交错配置(亦即任两相邻的角落配置有一个连接凸部11
‑
141与一个固定凸部11
‑
111),而偏压组件11
‑
w连接固定凸部11
‑
111与连接凸部11
‑
141。
[1350]
详细而言,偏压组件11
‑
w的每一个偏压元件11
‑
ws的两端,分别连接固定本体11
‑
11的固定凸部11
‑
111与活动件11
‑
14的连接凸部11
‑
141,且固定凸部11
‑
111与连接凸部11
‑
141朝向活动部11
‑
20延伸。
[1351]
活动件11
‑
14还包含至少一(本实施例为两个)延伸凸部11
‑
142和至少一(本实施例为两个)l字型的弦臂11
‑
143。延伸凸部11
‑
142邻近连接凸部11
‑
141,且与基底11
‑
10上方的活动部11
‑
20固定连接,而弦臂11
‑
143具有弹性结构,活动地连接基底11
‑
10的固定本体11
‑
11。如此,可让偏压组件11
‑
w驱使活动部相对于基底11
‑
10移动或旋转。
[1352]
一并参阅图137a及图137b,基底11
‑
10可定义出一第一电性连接部11
‑
101和一第二电性连接部11
‑
102,偏压元件11
‑
ws连接第一电性连接部11
‑
101和第二电性连接部11
‑
102。沿光轴11
‑
o方向观察,从光学驱动机构11
‑
1的光入射端(上端)开始,依序为固定本体11
‑
11(的固定凸部11
‑
111)、绝缘层11
‑
12和导电层11
‑
13,而偏压元件11
‑
ws被此三者所夹设,且与导电层11
‑
13电性连接,且固定凸部11
‑
111具有一弯曲部分,此弯曲部分的表面是没有设置绝缘层11
‑
12和导电层11
‑
13的。
[1353]
值得注意的是,在光轴11
‑
o方向上,在第一电性连接部11
‑
101中的绝缘层11
‑
12凸出固定本体11
‑
11的固定凸部11
‑
111与导电层11
‑
13,且导电层11
‑
13凸出于固定本体11
‑
111。如此一来,可确保增加导电层11
‑
13与偏压元件11
‑
ws的接触面积,提升驱动机构的整体品质。
[1354]
此外,前述绝缘层11
‑
12具有一缓冲部11
‑
121,位于绝缘层11
‑
12的朝向偏压元件11
‑
ws的一表面,且在光轴11
‑
o方向上,缓冲部11
‑
121与偏压元件11
‑
ws具有一间隙,此缓冲部11
‑
121具有提供偏压元件11
‑
ws在运动过程中缓冲的功能,有助于减少偏压元件因碰撞而损害的情形。于一些实施例中,前述缓冲部11
‑
121可为软性材质,且具有一弧形导角或具有一渐缩结构,更可降低偏压元件11
‑
ws在运动的过程中因碰撞而受到损伤的情形发生。
[1355]
继续参阅图137b,当偏压组件11
‑
w的偏压元件11
‑
ws组装于基底11
‑
10的第一电性连接部11
‑
101时,偏压元件11
‑
ws被导电层11
‑
13、绝缘层11
‑
12、固定本体11
‑
11从内而外依序包覆,并且施加多个夹持力:一第一夹持力11
‑
f1和一第二夹持力11
‑
f2,例如通过组装用的夹持件(未附图)所施加。在本实施例中,前述第一夹持力11
‑
f1施加于第一电性连接部11
‑
101的一中间位置,而第二夹持力11
‑
f2施加于第一电性连接部11
‑
101的一端部位置来
夹持偏压元件11
‑
ws。其中,第一夹持力11
‑
f1与第二夹持力11
‑
f2不同:第一夹持力11
‑
f1大于第二夹持力11
‑
f2,如此可降低偏压组件11
‑
w的应力过于集中造成损坏,且在端部位置所施加的较小的第二夹持力11
‑
f2,也可使偏压组件11
‑
w不会过于完全固定而达到较佳的弹性效果。
[1356]
于另一实施例中,基底11
‑
10还包含一第一树脂件11
‑
15。参阅图137c,第一树脂件11
‑
15设置于第一电性连接部11
‑
101中的绝缘层11
‑
12与偏压元件11
‑
ws之间。第一树脂件11
‑
15直接接触偏压元件11
‑
ws和该第一电性连接部11
‑
101的绝缘层11
‑
12。经由第一树脂件11
‑
15,可避免偏压元件11
‑
ws的端部与第一电性连接部11
‑
101直接碰撞,特别是对于第一电性连接部11
‑
101中的绝缘层11
‑
12,提升整体机构的信赖度。此外,偏压元件11
‑
ws的表面具有一保护层11
‑
wss,沿着光轴11
‑
o方向观察时,在第一电性连接部11
‑
101与偏压元件11
‑
ws重叠的边界处,保护层11
‑
wss与绝缘层11
‑
12,也与导电层11
‑
13部分重叠。如此可在偏压组件11
‑
w运动时,强化对偏压元件11
‑
ws的保护力。
[1357]
图137d显示第二电性连接部11
‑
102与偏压元件11
‑
ws的连接示意图。基底11
‑
10还包含第二树脂件11
‑
16,设置于第二电性连接部11
‑
102中的绝缘层11
‑
12与偏压元件11
‑
ws之间,并直接接触偏压元件11
‑
ws和第二电性连接部11
‑
102的绝缘层11
‑
12。相同于前述第一树脂件11
‑
15,第二树脂件11
‑
16同样能够提供保护偏压元件11
‑
ws,避免其撞第二电性连接部11
‑
102到受到损害。前述第一树脂件11
‑
15和第二树脂件11
‑
16可具有玻璃纤维或陶瓷材料,并可构成一树脂组件。
[1358]
图138显示基底11
‑
10的第一电性连接部11
‑
101和第二电性连接部11
‑
102两者具有一高度差:距离11
‑
t1,也就是说两者之间的连线是相较于基底11
‑
10表面倾斜的。因此,从垂直光轴11
‑
o的方向来看,第一、第二电性连接部11
‑
101、102的排列方向与光轴11
‑
o不垂直也不平行。
[1359]
图139显示基底11
‑
10还包含一滑块11
‑
17。滑块11
‑
17设置在固定本体11
‑
11和活动件11
‑
14之间,以可滑动的方式接触固定本体11
‑
11和活动件11
‑
14。如此一来,可确保偏压元件11
‑
ws带动活动件11
‑
14相对于固定本体11
‑
11移动时,能够更平顺,提升驱动机构的性能。
[1360]
图140a显示前述基底11
‑
10还包含一制震组件11
‑
18。于本实施例中,制震组件11
‑
18具有多个(四个)制震元件11
‑
181,分别对应偏压组件11
‑
w的多个偏压元件11
‑
ws。每一制震元件11
‑
181设置于偏压元件11
‑
ws上,并直接接触偏压元件11
‑
ws与活动件11
‑
14的弹性的弦臂11
‑
143,如此可达抑制偏压元件11
‑
ws断裂与减震的效果。于本实施例中,每一制震元件11
‑
181大约设置于第一、第二电性连接部11
‑
101、11
‑
102连线的中间位置处(例如可位在或邻近偏压元件11
‑
ws的中心位置),制震元件11
‑
181与第一、第二电性连接部11
‑
101、11
‑
102之间分别具有间隙(或距离)11
‑
t2、11
‑
t2’,间隙11
‑
t2、11
‑
t2’大致相等。且沿着光轴11
‑
o方向观察时,这些制震元件11
‑
181以对称的形式围绕光轴11
‑
o。制震元件11
‑
181可具有硅胶(silica gel)、玻璃纤维或陶瓷材料。
[1361]
图140b为基底11
‑
10包含另一实施例的制震组件11
‑
18。与图140a中的制震组件11
‑
18的实施例不同的是,本实施例的制震组件11
‑
18具有更多的制震元件11
‑
181、11
‑
182、11
‑
183。制震组件11
‑
18包含除了设置于第一、第二电性连接部11
‑
101、11
‑
102的中间处外的制震元件(第一制震元件)11
‑
181外,还具有设置于邻近偏压元件11
‑
ws两端且直接接触
第一、第二电性连接部11
‑
101、11
‑
102的第二、第三制震元件11
‑
182、11
‑
183。且制第一、第二、第三制震元件11
‑
181、11
‑
182、11
‑
183之间具有大致相等的间隙11
‑
t3、11
‑
t3’。如此更能够提升减震的效果。
[1362]
图140c为基底11
‑
10包含另一实施例的制震组件11
‑
18,与图140b中的制震组件11
‑
18的实施例不同的是,本实施例的制震组件11
‑
18具有更多的制震元件:第一、第二、第三、第四制震元件11
‑
181、11
‑
182、11
‑
183、11
‑
184。与图140b中的实施例主要差异在于,两个制震元件:第一、第四制震元件11
‑
181、11
‑
184设置在第二、第三制震元件11
‑
182、11
‑
183之间,且这些制震元件之间形成有大致相等的间隙11
‑
t4、11
‑
t4’、11
‑
t4”。如此更能够提升减震的效果。
[1363]
图141为本发明另一实施例的阻尼元件11
‑
g设置在框架11
‑
22和外壳11
‑
h之间的示意图。如图141所示,于一实施例中,也可以在外壳11
‑
h和框架11
‑
22之间设置至少一阻尼元件11
‑
g,以避免外壳11
‑
h和框架11
‑
22之间因碰撞而造成结构损坏或产生异音。
[1364]
图142为本发明另一实施例的缓冲件11
‑
g沿垂直方向连接承载件11
‑
23和框架11
‑
22的示意图。如图142所示,于一实施例中,也可以将一缓冲件11
‑
g沿着垂直方向连接承载件11
‑
23的一外侧表面11
‑
231以及框架11
‑
22的一内侧表面11
‑
221;应了解的是,前述缓冲件11
‑
g凸出于承载件11
‑
23的一顶面11
‑
232,且前述外侧表面11
‑
231和内侧表面11
‑
221在垂直方向上相隔一距离;此外,前述缓冲件11
‑
g也可以凸出于框架11
‑
22的一顶面11
‑
222并连接外壳11
‑
h,以避免框架11
‑
22碰撞到外壳11
‑
h或承载件11
‑
23而造成结构损坏或产生异音。
[1365]
图143为本发明另一实施例的缓冲件11
‑
g沿水平方向连接承载件11
‑
23和框架11
‑
22的示意图。如图143所示,于一实施例中,一缓冲件11
‑
g沿着水平方向连接承载件11
‑
23的一外侧表面11
‑
231以及框架11
‑
22的一内侧表面11
‑
221,其中前述外侧表面11
‑
231和内侧表面11
‑
221在该水平方向上至少部分重叠,由此可有效地避免承载件11
‑
23和框架11
‑
22相互碰撞而造成结构损坏或产生异音。
[1366]
图144为本发明另一实施例的缓冲件11
‑
g沿水平方向连接承载件11
‑
23和基座11
‑
21的示意图。如图144所示,于一实施例中,一缓冲件11
‑
g沿着水平方向连接承载件11
‑
23以及基座11
‑
21的凸柱11
‑
211,由此可有效地避免承载件11
‑
23和基座11
‑
21相互碰撞而造成结构损坏或产生异音。
[1367]
图145为本发明另一实施例的缓冲件11
‑
g沿水平方向连接磁性组件11
‑
m和承载件11
‑
23的一凸出部11
‑
233的示意图。如图145所示,于一实施例中,一缓冲件11
‑
g沿着水平方向连接磁性组件11
‑
m和形成于承载件11
‑
23侧边的一凸出部11
‑
233,其中磁性组件11
‑
m固定于框架11
‑
22上,凸出部11
‑
233则是穿过线圈组件11
‑
c并朝磁性组件11
‑
m方向凸出于线圈组件11
‑
c的一侧,由此可有效地避免磁性组件11
‑
m碰撞到线圈组件11
‑
c或承载件11
‑
23而造成结构损坏或产生异音。
[1368]
图146为本发明另一实施例的缓冲件11
‑
g沿水平方向连接磁性组件11
‑
m和承载件11
‑
23侧边的一电路元件11
‑
p的示意图。如图146所示,于另一实施例中,一电路元件11
‑
p(例如集成电路元件或印刷电路板)通过粘着剂11
‑
r或焊锡而固定于承载件11
‑
23的一侧,线圈组件11
‑
c则环绕前述电路元件11
‑
p;其中,一缓冲件11
‑
g可沿着水平方向连接磁性组件11
‑
m和位在承载件11
‑
23侧边上的电路元件11
‑
p,以防止磁性组件11
‑
m碰撞到线圈组件
11
‑
c或电路元件11
‑
p,从而可避免光学驱动机构11
‑
1内部的结构损坏或产生异音。
[1369]
综上所述,本发明提供一种光学驱动机构11
‑
1,其中利用至少一阻尼元件11
‑
g连接可相互移动的框架11
‑
22(活动部)以及外壳11
‑
h(固定部),从而能够避免两者之间因彼此碰撞而造成结构损坏或产生异音。于一实施例中,也可以利用缓冲件11
‑
g连接框架11
‑
22以及承载件11
‑
23,或者也可以利用缓冲件11
‑
g连接磁性组件11
‑
m以及以及承载件11
‑
23,以防止承载件11
‑
23碰撞到框架11
‑
22或磁性组件11
‑
m,从而能够避免光学驱动机构11
‑
1内部的结构损坏或产生异音。举例而言,前述阻尼元件11
‑
g以及缓冲件11
‑
g可具有硅胶(silica gel)、玻璃纤维或陶瓷材料。
[1370]
请参阅图147,本发明一实施例的光学元件驱动机构12
‑
10可装设于一电子装置12
‑
20内,以承载并驱动一光学元件12
‑
30,使光学元件12
‑
30可相对于电子装置12
‑
20中的感光元件(未图示)移动,进而达到对焦及/变焦的目的。前述电子装置12
‑
20例如可为具智能手机、平板电脑、或是数字相机,而光学元件12
‑
30则可为一镜头。
[1371]
图148和图149为前述光学元件驱动机构12
‑
10的示意图和爆炸图,且图150为图148中沿12
‑
a
‑
12
‑
a方向的剖视图。如图148至图150所示,光学元件驱动机构12
‑
10主要包括一固定部12
‑
100、一活动部12
‑
200、一第一弹性元件12
‑
300、一第二弹性元件12
‑
400以及一驱动组件12
‑
500。
[1372]
固定部12
‑
100包括一第一元件12
‑
110和一第二元件12
‑
120,两者可固定地连接,以在两者之间形成一容纳空间12
‑
r。活动部12
‑
200、第一弹性元件12
‑
300、第二弹性元件12
‑
400和驱动组件12
‑
500可容置于容纳空间12
‑
r中。
[1373]
第一元件12
‑
110例如可为一盖体,其包括一顶壁12
‑
111和至少一侧壁12
‑
112。顶壁12
‑
111具有板状结构,且垂直于光学元件驱动机构12
‑
10的一主轴12
‑
ax1。侧壁12
‑
112同样具有板状结构,且侧壁12
‑
112连接于顶壁12
‑
111的边缘并从前述边缘朝向第二元件12
‑
120延伸。因此,侧壁12
‑
112的延伸方向将不会垂直于主轴12
‑
ax1。于本实施例中,侧壁12
‑
112的延伸方向平行于主轴12
‑
ax1。第一元件12
‑
110例如可包括金属材质,但并不限定于此。
[1374]
第一元件12
‑
110的侧壁12
‑
112上可形成有一第一渐缩结构12
‑
113,具体而言,第一渐缩结构12
‑
113可包括一第一表面12
‑
s1和一第二表面12
‑
s2。第一表面12
‑
s1具有平面结构,当第一元件12
‑
110和第二元件12
‑
120彼此结合时,第一表面12
‑
s1面朝第二元件12
‑
120,且平行于主轴12
‑
ax1。第二表面12
‑
s2则相对于第一表面12
‑
s1倾斜,因此第二表面12
‑
s2将不平行且不垂直于主轴12
‑
ax1和第一表面12
‑
s1。第一表面12
‑
s1和第二表面12
‑
s2会面朝不同方向。
[1375]
第二元件12
‑
120例如可为一底座,其可包括塑胶材质,且一或多个导线12
‑
w可埋设于第二元件12
‑
120中。第二元件12
‑
120可包括一第二渐缩结构12
‑
121,具体而言,第二渐缩结构12
‑
121可包括一第三表面12
‑
s3和一第四表面12
‑
s4。当第一元件12
‑
110和第二元件12
‑
120彼此结合时,第三表面12
‑
s3面朝第一元件12
‑
110的侧壁12
‑
112,且平行于主轴12
‑
ax1。第四表面12
‑
s4则相对于第三表面12
‑
s3倾斜,因此第四表面12
‑
s4将不平行且不垂直于主轴12
‑
ax1和第三表面12
‑
s3。第三表面12
‑
s3和第四表面12
‑
s4会面朝不同方向。在本实施例中,第二元件12
‑
120的侧边具有阶梯状结构,因此第二渐缩结构12
‑
121的第三表面12
‑
s3可包括两个区段12
‑
s31、12
‑
s32。
[1376]
于本实施例中,使用者可通过一第一接着元件12
‑
p1和一第二接着元件12
‑
p2来粘贴第一渐缩结构12
‑
113和第二渐缩结构12
‑
121,使第一元件12
‑
110固定地连接至第二元件12
‑
120。如图150所示,当第一元件12
‑
110和第二元件12
‑
120结合时,第一表面12
‑
s1和第三表面12
‑
s3面朝相反方向,且一第一间隙12
‑
g1将形成于第一表面12
‑
s1和第三表面12
‑
s3的区段12
‑
s31之间,一第二间隙12
‑
g2将形成于第一表面12
‑
s1和第三表面12
‑
s3的区段12
‑
s32之间,且第一间隙12
‑
g1和第二间隙12
‑
g2彼此连通。由于区段12
‑
s31比区段12
‑
s32更为靠近第一表面12
‑
s1,因此第一元件12
‑
110和第二元件12
‑
120在第一间隙12
‑
g1中的最短距离将小于第一元件12
‑
110和第二元件12
‑
120在第二间隙12
‑
g2中的最短距离。
[1377]
使用者可先将第一接着元件12
‑
p1填入第一间隙12
‑
g1中,待第一接着元件12
‑
p1固化后,再将第二接着元件12
‑
p2填入第二间隙12
‑
g2中。由于第一元件12
‑
110和第二元件12
‑
120组装后区段12
‑
s32会比区段12
‑
s31靠近光学元件驱动机构12
‑
10的外部,因此第一间隙12
‑
g1与容纳空间12
‑
r之间的最短距离将会小于第二间隙12
‑
g2与容纳空间12
‑
r之间的最短距离。从而,当第一元件12
‑
110和第二元件12
‑
120经由第一接着元件12
‑
p1和第二接着元件12
‑
p2彼此固定时,仅第二间隙12
‑
g2和第二接着元件12
‑
p2会显露,而第一间隙12
‑
g1和第一接着元件12
‑
p1则不会显露于外。
[1378]
由于第一间隙12
‑
g1和第二间隙12
‑
g2的位置对应于第一元件12
‑
110的第一渐缩结构12
‑
113和第二元件12
‑
120的第二渐缩结构12
‑
121,因此若光学元件驱动机构12
‑
10不慎受到外力冲击,第一渐缩结构12
‑
113及/或第二渐缩结构12
‑
121可产生些微的形变,以分散应力,避免第一元件12
‑
110和第二元件12
‑
120在粘贴处分离或断裂。
[1379]
详细而言,在本实施例中,第一表面12
‑
s1面朝第一间隙12
‑
g1和第二间隙12
‑
g2,且第三表面12
‑
s3同样面朝第一间隙12
‑
g1和第二间隙12
‑
g2。沿着垂直主轴12
‑
ax1/第一表面12
‑
s1/第三表面12
‑
s3的方向观察时,第一渐缩结构12
‑
113和第二渐缩结构12
‑
121重叠,第一渐缩结构12
‑
113的渐缩方向相反于第二渐缩结构12
‑
121的渐缩方向,第一表面12
‑
s1与第一间隙12
‑
g1和第二间隙12
‑
g2重叠,且第三表面12
‑
s3的区段12
‑
s31、12
‑
s32分别与第一间隙12
‑
g1和第二间隙12
‑
g2重叠。当第一接着元件12
‑
p1和第二接着元件12
‑
p2分别填入第一间隙12
‑
g1和第二间隙12
‑
g2中后,第一接着元件12
‑
p1会直接接触第一表面12
‑
s1和区段12
‑
s31,第二接着元件12
‑
p2会直接接触第一表面12
‑
s1和区段12
‑
s32,且第一接着元件12
‑
p1和第二接着元件12
‑
p2会直接接触彼此。如此一来,可提高第一接着元件12
‑
p1和第二接着元件12
‑
p2的接触面积,使粘贴强度提升。
[1380]
需特别说明的是,前述第一接着元件12
‑
p1和第二接着元件12
‑
p2是使用不同的粘贴材料。举例而言,第一接着元件12
‑
p1可为一热固胶,而第二接着元件12
‑
p2则可为一光固胶。亦即第一接着元件12
‑
p1是以加热方式进行固化,而第二接着元件12
‑
p2则是以照光方式进行固化。第一接着元件12
‑
p1未固化时的粘度小于第二接着元件12
‑
p2未固化时的粘度,且第一接着元件12
‑
p1固化后的杨氏模数大于第二接着元件12
‑
p2固化后的杨氏模数。第一接着元件12
‑
p1和第二接着元件12
‑
p2可分别由合适的树脂材料构成。
[1381]
另外,沿着主轴12
‑
ax1方向观察时,第一间隙12
‑
g1将连续且不间断地围绕第二元件12
‑
120,因此填充于第一间隙12
‑
g1中的第一接着元件12
‑
p1也会连续且不间断地围绕第二元件12
‑
120,由此可完全封闭第一元件12
‑
110和第二元件12
‑
120之间的间隙,避免流体或异物入侵容纳空间12
‑
r。
[1382]
本实施例中是利用第一接着元件12
‑
p1和第二接着元件12
‑
p2来连接固定部12
‑
100的第一元件12
‑
110和第二元件12
‑
120。于一些实施例中,活动部12
‑
200可包括多个元件,且可使用与前述方式相同的方式来连接这些元件。
[1383]
请继续参阅图148至图150,于本实施例中,活动部12
‑
200例如可为承载座,前述光学元件12
‑
30可固定于活动部12
‑
200上。活动部12
‑
200可设置于第一弹性元件12
‑
300和第二弹性元件12
‑
400之间,且通过第一弹性元件12
‑
300和第二弹性元件12
‑
400活动地连接固定部12
‑
100。
[1384]
第一弹性元件12
‑
300例如可为具有板状结构的金属簧片,其可垂直于主轴12
‑
ax1并可划分为至少一第一固定部连接段12
‑
310、至少一第一活动部连接段12
‑
320以及至少一第一弹性变形段12
‑
330。如图149和图150所示,第一固定部连接段12
‑
310可通过一第三接着元件12
‑
p3固定至第二元件12
‑
120,第一活动部连接段12
‑
320可通过一第四接着元件12
‑
p4固定至活动部12
‑
200,且第一弹性变形段12
‑
330在第一固定部连接段12
‑
310和第一活动部连接段12
‑
320之间活动地连接两者。
[1385]
第三接着元件12
‑
p3和第四接着元件12
‑
p4的材质可与第二接着元件12
‑
p2的材质相同。换言之,第三接着元件12
‑
p3和第四接着元件12
‑
p4亦可为光固胶,且第三接着元件12
‑
p3和第四接着元件12
‑
p4固化后的杨氏模数可相同于第二接着元件12
‑
p2固化后的杨氏模数。由于第一弹性变形段12
‑
330、第三接着元件12
‑
p3以及第四接着元件12
‑
p4皆可产生形变,因此当活动部12
‑
200相对于固定部12
‑
100移动时,第一弹性变形段12
‑
330、第三接着元件12
‑
p3和第四接着元件12
‑
p4可分散过度的应力,避免光学元件驱动机构12
‑
10损坏。
[1386]
于本实施例中,第三接着元件12
‑
p3直接接触第二元件12
‑
120面朝容纳空间12
‑
r的第一接着表面12
‑
122以及第一固定部连接段12
‑
310面朝容纳空间12
‑
r的第二接着表面12
‑
311,且更直接接触前述第二渐缩结构12
‑
121的第四表面12
‑
s4,因此,可提升接触面积,进而增加粘贴强度。
[1387]
第二弹性元件12
‑
400例如可为具有板状结构的金属簧片,其可垂直于主轴12
‑
ax1并可划分为至少一第二固定部连接段12
‑
410、至少一第二活动部连接段12
‑
420以及至少一第二弹性变形段12
‑
430。如图149和图150所示,第二固定部连接段12
‑
410可通过一第五接着元件12
‑
p5固定至第一元件12
‑
110,第二活动部连接段12
‑
420可通过一第六接着元件12
‑
p6固定至活动部12
‑
200,且第二弹性变形段12
‑
430在第二固定部连接段12
‑
410和第二活动部连接段12
‑
420之间活动地连接两者。
[1388]
第五接着元件12
‑
p5和第六接着元件12
‑
p6的材质可与第二接着元件12
‑
p2的材质相同。换言之,第五接着元件12
‑
p5和第六接着元件12
‑
p6亦可为光固胶,且第五接着元件12
‑
p5和第六接着元件12
‑
p6固化后的杨氏模数可相同于第二接着元件12
‑
p2固化后的杨氏模数。由于第二弹性变形段12
‑
430、第五接着元件12
‑
p5以及第六接着元件12
‑
p6皆可产生形变,因此当活动部12
‑
200相对于固定部12
‑
100移动时,第二弹性变形段12
‑
430、第五接着元件12
‑
p5和第六接着元件12
‑
p6可分散过度的应力,避免光学元件驱动机构12
‑
10损坏。
[1389]
请回到图149,驱动组件12
‑
500包括一驱动线圈12
‑
510以及至少一磁性元件12
‑
520,其中驱动线圈12
‑
510设置于活动部12
‑
200上,且磁性元件12
‑
520固定于第一元件12
‑
110上。当电流流经驱动线圈12
‑
510时,驱动线圈12
‑
510和磁性元件12
‑
520之间会产生电磁作用,进而施加驱动力使活动部12
‑
200以及设置于其上的光学元件12
‑
30相对于固定部12
‑
100运动。
[1390]
如图151和图152所示,驱动线圈12
‑
510的末端可缠绕于活动部12
‑
200的一绕线部12
‑
210上,且可通过一第七接着元件12
‑
p7连接至第一弹性元件12
‑
300的第一活动部连接段12
‑
320。第七接着元件12
‑
p7例如可为导电胶,在固化后可包括一导电区段12
‑
p71和一接着区域12
‑
p72。导电区域12
‑
p71与驱动线圈12
‑
510和第一活动部连接段12
‑
320接触,接着区域12
‑
p72则包覆导电区域12
‑
p71并接触绕线部12
‑
210和第一活动部连接段12
‑
320。由于导电区域12
‑
p71和接着区域12
‑
p72分别具有金属材质和树脂材质,因此导电区域12
‑
p71的电阻率会小于接着区域12
‑
p72的电阻率,导电区域12
‑
p71可导通驱动线圈12
‑
510和第一弹性元件12
‑
300。
[1391]
于本实施例中,导电区段12
‑
p71的电导率会大于第五接着元件12
‑
p5固化后的电导率,接着区域12
‑
p72的杨氏模数会大于第三接着元件12
‑
p3固化后的杨氏模数,且第七接着元件12
‑
p7是以加热方式进行固化。
[1392]
另外,如图150所示,在本实施例中,第一弹性元件12
‑
300的第一固定部连接段12
‑
310更通过一第八接着元件12
‑
p8连接至第二元件12
‑
120。第八接着元件12
‑
p8例如可为焊锡,因此其固化后的电导率会大于第三接着元件12
‑
p3固化后的电导率。第八接着元件12
‑
p8可与嵌埋在第二元件12
‑
120内的导线12
‑
w接触,因此可导通第一弹性元件12
‑
300和导线12
‑
w。应注意的是,第八接着元件12
‑
p8的熔点会高于第七接着元件12
‑
p7的固化温度,因此在提供热能来固化第七接着元件12
‑
p7时,第八接着元件12
‑
p8不会因融化而解焊。
[1393]
本发明另一实施例的光学元件驱动机构12
‑
10如图153和图154所示,此光学元件驱动机构12
‑
10与图148至图150所示的光学元件驱动机构12
‑
10的差异在于固定部12
‑
100还包括一第三元件12
‑
130、从主轴12
‑
ax1观察时第一元件12
‑
110的侧壁12
‑
112未与第三表面12
‑
s3的区段12
‑
s32重叠以及光学元件驱动机构12
‑
10还包括一第九接着元件12
‑
p9。
[1394]
第三元件12
‑
130例如可为一框架,其固定地设置于第一元件12
‑
110上。沿着主轴12
‑
ax1方向观察时,第三元件12
‑
130与磁性元件12
‑
520重叠,且第三元件12
‑
130与第一元件12
‑
110重叠。沿着垂直主轴12
‑
ax1的方向观察时,第三元件12
‑
130的部分位于磁性元件12
‑
520和顶壁12
‑
111之间。于本实施例中,第三元件12
‑
130具有塑胶材质。
[1395]
第二弹性元件12
‑
400的第二固定部连接段12
‑
410与第三元件12
‑
130连接。为了使第三元件12
‑
130、第二固定部连接段12
‑
410以及磁性元件12
‑
520相对于彼此固定且固定于第一元件12
‑
110上,本实施例中的第五接着元件12
‑
p5可直接接触第一元件12
‑
110、第三元件12
‑
130、第二固定部连接段12
‑
410以及磁性元件12
‑
520。
[1396]
为了使第一元件12
‑
110、第三元件12
‑
130、第二固定部连接段12
‑
410和磁性元件12
‑
520彼此之间牢固地连接,本实施例中的第五接着元件12
‑
p5可使用热固胶。进一步而言,本实施例中的第五接着元件12
‑
p5固化后的杨氏模数大于第三接着元件12
‑
p3、第四接着元件12
‑
p4、第六接着元件12
‑
p6固化后的杨氏模数,第五接着元件12
‑
p5固化后的杨氏模数大于第七接着元件12
‑
p7的接着区段12
‑
p72的杨氏模数、小于第八接着元件12
‑
p8固化后的杨氏模数,且第八接着元件12
‑
p8固化后的电导率大于第五接着元件12
‑
p5固化后的电导率。此外,由于磁性元件12
‑
520具有金属材质,因此可进一步地增加粘贴强度。
[1397]
在本实施例中,从主轴12
‑
ax1观察时,第一元件12
‑
110的侧壁12
‑
112未与第三表面12
‑
s3的区段12
‑
s32重叠。因此,第二接着元件12
‑
p2和第二间隙12
‑
g2会从光学元件驱动
机构12
‑
10的侧边显露。
[1398]
第九接着元件12
‑
p9例如可为一阻尼元件,其可直接接触固定部12
‑
100和活动部12
‑
200,以减少活动部12
‑
200移动时产生的振动。于本实施例中,第九接着元件12
‑
p9直接接触第二渐缩结构12
‑
121的第四表面12
‑
s4。第九接着元件12
‑
p9固化后的杨氏模数小于第四接着元件12
‑
p4固化后的杨氏模数。
[1399]
于一些实施例中,第九接着元件12
‑
p9直接接触固定部12
‑
100和第一弹性元件12
‑
300。于一些实施例中,第九接着元件12
‑
p9直接接触固定部12
‑
100和第二弹性元件12
‑
400。于一些实施例中,第九接着元件12
‑
p9直接接触固定部12
‑
100、活动部12
‑
200、第一弹性元件12
‑
300以及第二弹性元件12
‑
400。
[1400]
综上所述,本发明提供一种光学元件驱动机构,用以连接一光学元件。前述光学元件驱动机构包括一固定部和一第一接着元件。固定部包括一第一元件和一第二元件,其中第一元件经由第一接着元件固定地连接第二元件。
[1401]
请参阅图155,本发明一实施例的光学元件驱动机构13
‑
10可装设于一电子装置13
‑
20内,以承载并驱动一光学元件13
‑
30,使光学元件13
‑
30可相对于电子装置13
‑
20中的感光元件(未图示)移动,进而达到对焦及/变焦的目的。前述电子装置13
‑
20例如可为具智能手机、平板电脑、或是数字相机,而光学元件13
‑
30则可为一镜头。
[1402]
图156和图157为前述光学元件驱动机构13
‑
10的示意图和爆炸图,且图158为图156中沿13
‑
a
‑
13
‑
a方向的剖视图。如图156至图158所示,光学元件驱动机构13
‑
10主要包括一活动部13
‑
100、一第一驱动组件13
‑
200、一固定部13
‑
300、多个吊环线13
‑
400、一第二驱动组件13
‑
500以及至少一位置感测组件13
‑
600。
[1403]
活动部13
‑
100可包括一承载座13
‑
110、一第一弹性元件13
‑
120、一第二弹性元件13
‑
130以及一框架13
‑
140。在本实施例中,承载座13
‑
110可被称作第一元件,且第一弹性元件13
‑
120可被称作第二元件。
[1404]
光学元件13
‑
30可固定于承载座13
‑
110上,且承载座13
‑
110可设置于第一弹性元件13
‑
120和第二弹性元件13
‑
130之间,并通过第一弹性元件13
‑
120和第二弹性元件13
‑
130活动地连接框架13
‑
140。
[1405]
第一弹性元件13
‑
120例如可为具有板状结构的金属簧片,其可垂直于光学元件驱动机构13
‑
10的主轴13
‑
ax1并可划分为至少一连接段13
‑
121、至少一连接段13
‑
122以及至少一弦线段13
‑
123。连接段13
‑
121可通过一第一接着元件13
‑
p1固定至承载座13
‑
110,连接段13
‑
122可通过一第二接着元件13
‑
p2固定至框架13
‑
140,且弦线段13
‑
123在连接段13
‑
121和连接段13
‑
122之间连接两者。
[1406]
特别的是,如图158和图159所示,在本实施例中,承载座13
‑
110可具有一接着强化结构13
‑
111,且前述第一接着元件13
‑
p1是通过粘贴第一弹性元件13
‑
120的连接段13
‑
121和此接着强化结构13
‑
111来使第一弹性元件13
‑
120与承载座13
‑
110连接。详细而言,接着强化结构13
‑
111包括一第一接着表面13
‑
s1、一第二接着表面13
‑
s2、一第三接着表面13
‑
s3、一第四接着表面13
‑
s4、一第五接着表面13
‑
s5、一第六接着表面13
‑
s6、一第七接着表面13
‑
s7、一第八接着表面13
‑
s8、一第九接着表面13
‑
s9、一第一容纳空间13
‑
r1、一第二容纳空间13
‑
r2、一第一突起结构13
‑
t1以及一第二突起结构13
‑
t2。
[1407]
第一接着表面13
‑
s1为承载座13
‑
110的顶面,其大致垂直于光学元件驱动机构13
‑
10的主轴13
‑
ax1。第一容纳空间13
‑
r1形成于第一接着表面13
‑
s1上,且具有由第一接着表面13
‑
s1凹陷的内凹结构。
[1408]
第二接着表面13
‑
s2和第三接着表面13
‑
s3位于第一容纳空间13
‑
r1中,且第二接着表面13
‑
s2构成第一容纳空间13
‑
r1的内凹结构的侧面,第三接着表面13
‑
s3构成第一容纳空间13
‑
r1的内凹结构的底面。换言之,第二接着表面13
‑
s2邻接第一接着表面13
‑
s1,且第三接着表面13
‑
s3邻接第二接着表面13
‑
s2。于本实施例中,第一接着表面13
‑
s1平行于第三接着表面13
‑
s3,且第二接着表面13
‑
s2不平行于第三接着表面13
‑
s3和主轴13
‑
ax1。
[1409]
第一突起结构13
‑
t1自第三接着表面13
‑
s3凸出,且从主轴13
‑
ax1方向观察时,第一容纳空间13
‑
r1围绕第一突起结构13
‑
t1。第四接着表面13
‑
s4和第五接着表面13
‑
s5位于第一突起结构13
‑
t1上,其中第四接着表面13
‑
s4邻接第三接着表面13
‑
s3,第五接着表面13
‑
s5邻接第四接着表面13
‑
s4,且第一接着表面13
‑
s1和第五接着表面13
‑
s5面朝相同方向。于本实施例中,第四接着表面13
‑
s4不平行于第三接着表面13
‑
s3、第五接着表面13
‑
s5以及主轴13
‑
ax1,且第五接着表面13
‑
s5平行于第三接着表面13
‑
s3。
[1410]
第二容纳空间13
‑
r2形成于第五接着表面13
‑
s5上,且具有由第五接着表面13
‑
s5凹陷的内凹结构。第六接着表面13
‑
s6和第七接着表面13
‑
s7位于第二容纳空间13
‑
r2中,且第六接着表面13
‑
s6构成第二容纳空间13
‑
r2的内凹结构的侧面,第七接着表面13
‑
s7构成第二容纳空间13
‑
r2的内凹结构的底面。换言之,第六接着表面13
‑
s6邻接第五接着表面13
‑
s5,且第七接着表面13
‑
s7邻接第六接着表面13
‑
s6。于本实施例中,第六接着表面13
‑
s6不平行于第五接着表面13
‑
s5、第七接着表面13
‑
s7以及主轴13
‑
ax1,且第七接着表面13
‑
s7平行于第五接着表面13
‑
s5。
[1411]
第二突起结构13
‑
t2自第七接着表面13
‑
s7凸出,且从主轴13
‑
ax1方向观察时,第二容纳空间13
‑
r2围绕第二突起结构13
‑
t2。第八接着表面13
‑
s8和第九接着表面13
‑
s9位于第二突起结构13
‑
t2上,其中第八接着表面13
‑
s8邻接第七接着表面13
‑
s7,第九接着表面13
‑
s9邻接第八接着表面13
‑
s8,且第九接着表面13
‑
s9和第五接着表面13
‑
s5面朝相同方向。于本实施例中,第八接着表面13
‑
s8不平行于第七接着表面13
‑
s7、第九接着表面13
‑
s9以及主轴13
‑
ax1,且第九接着表面13
‑
s9平行于第五接着表面13
‑
s5。
[1412]
沿着垂直于主轴13
‑
ax1的方向观察时,第二接着表面13
‑
s2、第三接着表面13
‑
s3以及第四接着表面13
‑
s4可在第一接着表面13
‑
s1和第五接着表面13
‑
s5之间形成u字形结构,且第六接着表面13
‑
s6、第七接着表面13
‑
s7以及第八接着表面13
‑
s8可在第五接着表面13
‑
s5和第九接着表面13
‑
s9之间形成u字形结构。
[1413]
在本实施例中,第三接着表面13
‑
s3和第七接着表面13
‑
s7共平面。由于第一突起结构13
‑
t1和第二突起结构13
‑
t2的高度小于第一容纳空间13
‑
r1的深度,且第一突起结构13
‑
t1的高度小于第二突起结构13
‑
t2的高度,因此前述第一接着表面13
‑
s1、第五接着表面13
‑
s5、和第九接着表面13
‑
s9彼此不共面。沿着垂直于主轴13
‑
ax1的方向观察时,在主轴13
‑
ax1方向上,第九接着表面13
‑
s9位于第一接着表面13
‑
s1和第五接着表面13
‑
s5之间。
[1414]
另外,在本实施例中,第七接着表面13
‑
s7的宽度小于第三接着表面13
‑
s3的宽度,亦即沿着垂直于主轴13
‑
ax1的方向观察时,第六接着表面13
‑
s6和第八接着表面13
‑
s8之间的最短距离小于第二接着表面13
‑
s2和第四接着表面13
‑
s4之间的最短距离。因此,为了使第一接着元件13
‑
p1可顺利地填满第一容纳空间13
‑
r1和第二容纳空间13
‑
r2,第六接着表
面13
‑
s6和第七接着表面13
‑
s7之间的夹角可大于第二接着表面13
‑
s2和第三接着表面13
‑
s3之间的夹角,且第七接着表面13
‑
s7和第八接着表面13
‑
s8之间的夹角可大于第三接着表面13
‑
s3和第四接着表面13
‑
s4之间的夹角。
[1415]
通过前述结构,当使用者利用第一接着元件13
‑
p1粘贴第一弹性元件13
‑
120的连接段13
‑
121和接着强化结构13
‑
111时,第一接着元件13
‑
p1将可顺利地进入第一容纳空间13
‑
r1和第二容纳空间13
‑
r2中,并与第一接着表面13
‑
s1、第二接着表面13
‑
s2、第三接着表面13
‑
s3、第四接着表面13
‑
s4、第五接着表面13
‑
s5、第六接着表面13
‑
s6、第七接着表面13
‑
s7、第八接着表面13
‑
s8、第九接着表面13
‑
s9直接接触。如此一来,可大幅地增加接触面积,进而有效地增加承载座13
‑
110和第一弹性元件13
‑
120之间的接着强度。
[1416]
于本实施例中,第一接着元件13
‑
p1和第二接着元件13
‑
p2可包括相同的材料。因此,第一接着元件13
‑
p1固化后的杨氏模数将大致相同于第二接着元件13
‑
p2固化后的杨氏模数。举例而言,第一接着元件13
‑
p1和第二接着元件13
‑
p2可为光固胶,亦即第一接着元件13
‑
p1和第二接着元件13
‑
p2是以照光方式进行固化。
[1417]
请回到图156至图158,与第一弹性元件13
‑
120类似,第二弹性元件13
‑
130亦可为具有板状结构的金属簧片,且可垂直于主轴13
‑
ax1并可划分为至少一连接段13
‑
131、至少一连接段13
‑
132以及至少一弦线段13
‑
133。连接段13
‑
131可通过一第三接着元件13
‑
p3固定至承载座13
‑
110,连接段13
‑
132可通过一第四接着元件13
‑
p4固定至框架13
‑
140,且弦线段13
‑
133在连接段13
‑
131和第二活动部连接段13
‑
132之间连接两者。
[1418]
于本实施例中,第三接着元件13
‑
p3和第四接着元件13
‑
p4的材料可相同于第二接着元件13
‑
p2的材料。因此,第二接着元件13
‑
p2固化后的杨氏模数将大致相同于第三接着元件13
‑
p3固化后的杨氏模数和第四接着元件13
‑
p4固化后的杨氏模数。
[1419]
第一驱动组件13
‑
200包括一驱动线圈13
‑
210以及至少一磁性元件13
‑
220,其中驱动线圈13
‑
210设置于承载座13
‑
110上,且磁性元件13
‑
220固定于框架13
‑
140上。当电流流经驱动线圈13
‑
210时,驱动线圈13
‑
210和磁性元件13
‑
220之间会产生电磁作用,进而施加驱动力使承载座13
‑
110以及设置于其上的光学元件13
‑
30相对于框架13
‑
140运动。
[1420]
如图160和图161所示,驱动线圈13
‑
210的末端可缠绕于承载座13
‑
110的一绕线部13
‑
113上,且可通过一第五接着元件13
‑
p5连接至第一弹性元件13
‑
120的连接段13
‑
121。第五接着元件13
‑
p5例如可为导电胶,在固化后可包括一导电区段13
‑
p51和一接着区域13
‑
p52。导电区域13
‑
p51接触驱动线圈13
‑
210以及连接段13
‑
121,接着区域13
‑
p52则包覆导电区域13
‑
p51。由于导电区域13
‑
p51和接着区域13
‑
p52分别具有金属材质和树脂材质,因此导电区域13
‑
p51的电阻率会小于接着区域13
‑
p52的电阻率,导电区域13
‑
p51可导通驱动线圈13
‑
210和第一弹性元件13
‑
120。
[1421]
于本实施例中,导电区段13
‑
p51的电导率会大于第一接着元件13
‑
p1固化后的电导率,且接着区域13
‑
p52的杨氏模数会大于第一接着元件13
‑
p1固化后的杨氏模数。
[1422]
另外,如图158所示,在本实施例中,第四接着元件13
‑
p4更直接接触磁性元件13
‑
220,使得连接段13
‑
132可更固定至磁性元件13
‑
220。
[1423]
图162为图156中沿13
‑
b
‑
13
‑
b方向的剖视图。请一并参阅图157和图162,固定部13
‑
300包括一外框13
‑
310和一底座13
‑
320,两者可固定地连接,以在两者之间形成一容纳空间13
‑
r。前述活动部13
‑
100可容置于此容纳空间13
‑
r中。
[1424]
外框13
‑
310包括一顶壁13
‑
311和至少一侧壁13
‑
312。顶壁13
‑
311具有板状结构,且垂直于主轴13
‑
ax1。侧壁13
‑
312同样具有板状结构,且侧壁13
‑
312连接于顶壁13
‑
311的边缘并从前述边缘朝向底座13
‑
320延伸。因此,侧壁13
‑
312将不垂直于主轴13
‑
ax1。
[1425]
底座13
‑
320面朝侧壁13
‑
312的侧面具有阶梯状结构,因此可包括表面13
‑
321和表面13
‑
322。一第一间隙13
‑
g1可形成于表面13
‑
321和侧壁13
‑
312之间,一第二间隙13
‑
g2可形成于表面13
‑
322和侧壁13
‑
312之间,且第一间隙12
‑
g1和第二间隙12
‑
g2彼此连通。由于表面13
‑
321比表面13
‑
322更为靠近侧壁13
‑
312,因此外框13
‑
310和底座13
‑
320在第一间隙12
‑
g1中的最短距离将小于外框13
‑
310和底座13
‑
320在第二间隙12
‑
g2中的最短距离。
[1426]
于本实施例中,使用者可通过一第六接着元件13
‑
p6和一第七接着元件13
‑
p7来粘贴外框13
‑
310和底座13
‑
320。首先,使用者可先将第六接着元件13
‑
p6填入第一间隙13
‑
g1中,待第六接着元件13
‑
p6固化后,再将第七接着元件13
‑
p7填入第二间隙13
‑
g2中。由于外框13
‑
310和底座13
‑
320组装后表面13
‑
322会比表面13
‑
321靠近光学元件驱动机构13
‑
10的外部,因此第一间隙13
‑
g1与容纳空间13
‑
r之间的最短距离将会小于第二间隙13
‑
g2与容纳空间13
‑
r之间的最短距离。从而,当外框13
‑
310和底座13
‑
320经由第六接着元件13
‑
p6和第七接着元件13
‑
p7彼此固定时,第七接着元件13
‑
p7从底座13
‑
320显露,而第六接着元件13
‑
p6不会显露于外。
[1427]
需特别说明的是,前述第六接着元件13
‑
p6和第七接着元件13
‑
p7是使用不同的粘贴材料。举例而言,第六接着元件13
‑
p6可为一热固胶,而第七接着元件13
‑
p7则可为一光固胶。亦即第六接着元件13
‑
p6是以加热方式进行固化,而第七接着元件13
‑
p7则是以照光方式进行固化。第六接着元件13
‑
p6未固化时的粘度小于第七接着元件13
‑
p7未固化时的粘度,且第六接着元件13
‑
p6固化后的杨氏模数大于第七接着元件13
‑
p7固化后的杨氏模数。第六接着元件13
‑
p6和第七接着元件13
‑
p7可分别由合适的树脂材料构成。
[1428]
另外,沿着主轴13
‑
ax1方向观察时,第一间隙13
‑
g1将连续且不间断地围绕底座13
‑
320,因此填充于第一间隙13
‑
g1中的第六接着元件13
‑
p6也会连续且不间断地围绕底座13
‑
320,由此可完全封闭外框13
‑
310和底座13
‑
320之间的间隙,避免流体或异物入侵容纳空间13
‑
r。
[1429]
吊环线13
‑
400具有长条型结构,且沿着垂直于第一弹性元件13
‑
120的方向延伸并穿过底座13
‑
320。吊环线13
‑
400的两端分别通过第八接着元件13
‑
p8固定至第一弹性元件13
‑
120和底座13
‑
320,以限制活动部13
‑
100相对于固定部13
‑
300的活动范围。详细而言,吊环线13
‑
400一端的第八接着元件13
‑
p8可接触吊环线13
‑
400和第一弹性元件13
‑
120来将吊环线13
‑
400的一端固定至第一弹性元件13
‑
120,吊环线13
‑
400另一端的第八接着元件13
‑
p8则可接触吊环线13
‑
400和第七接着元件13
‑
p7来将吊环线13
‑
400的另一端固定至底座13
‑
320。
[1430]
于本实施例中,吊环线13
‑
400会延伸至第二间隙13
‑
g2,因此至少部分的吊环线13
‑
400会容置于第二间隙13
‑
g2中。第八接着元件13
‑
p8的材料可相同于第七接着元件13
‑
p7的材料,因此第八接着元件13
‑
p8固化后的杨氏模数将大致相同于第七接着元件13
‑
p7固化后的杨氏模数。于一些实施例中,第七接着元件13
‑
p7和第八接着元件13
‑
p8为一体成型。于本实施例中,前述吊环线13
‑
400可被称作第三弹性元件。
[1431]
第二驱动组件13
‑
500例如可包括一电路板13
‑
510,设置于底座13
‑
320上并容置于
容纳空间13
‑
r中。当电流流经电路板13
‑
510上的电路时,前述电路和磁性元件13
‑
220之间会产生电磁作用,进而施加驱动力使整个活动部13
‑
100相对于固定部13
‑
300运动。
[1432]
如图158所示,电路板13
‑
510可与嵌埋于底座13
‑
320中的电路组件13
‑
w(例如导线)在电性接点13
‑
w1处电性连接。本实施例中的光学元件驱动机构13
‑
10可使用第九接着元件13
‑
p9来接触并覆盖前述电性接点13
‑
w1。
[1433]
如图157和图163所示,位置感测组件13
‑
600可设置于底座13
‑
320上,用以检测活动部13
‑
100及/或承载座13
‑
110相对于固定部13
‑
300的运动。举例而言,位置感测组件13
‑
600可为霍尔效应感测器(hall sensor)、磁阻效应感测器(magnetoresistance effect sensor,mr sensor)、巨磁阻效应感测器(giant magnetoresistance effect sensor,gmr sensor)、穿隧磁阻效应感测器(tunneling magnetoresistance effect sensor,tmr sensor)、或磁通量感测器(fluxgate)。
[1434]
位置感测组件13
‑
600可通过第十接着元件13
‑
p10粘贴至底座13
‑
320上。第九接着元件13
‑
p9和第十接着元件13
‑
p10可包括与第七接着元件13
‑
p7相同的材料,因此第九接着元件13
‑
p9和第十接着元件13
‑
p10亦可为光固胶,第七接着元件13
‑
p7固化后的杨氏系数大致相等于第九接着元件13
‑
p9固化后的杨氏模数和第十接着元件13
‑
p10固化后的杨氏模数。另外,于本实施例中,从光学元件驱动机构13
‑
10的外部观察时,第八接着元件13
‑
p8、第九接着元件13
‑
p9以及第十接着元件13
‑
p10都自底座13
‑
320显露。
[1435]
请参阅图164,于本发明另一实施例中,为了使第一弹性元件13
‑
120能更为牢固地固定至承载座13
‑
110,承载座13
‑
110可还包括一连接部13
‑
112,设置于接着强化结构13
‑
111旁。前述连接部13
‑
112包括一凸出区段13
‑
112a和一定位区段13
‑
112b,其中凸出区段13
‑
112a自第一接着表面13
‑
s1凸出,且穿过第一弹性元件13
‑
120的一开口13
‑
124,定位区段13
‑
112b则与凸出区段13
‑
112a连接。沿着垂直主轴13
‑
ax1的方向观察时,凸出区段13
‑
112a位于定位区段13
‑
112b和第一接着表面13
‑
s1之间。沿着主轴13
‑
ax1方向观察时,在垂直主轴13
‑
ax1的方向上,定位区段13
‑
112b的最大尺寸大于凸出区段13
‑
112a的最大尺寸,因此定位区段13
‑
112b可用以限制第一弹性元件13
‑
120在主轴13
‑
ax1方向上相对于承载座13
‑
110的位置。于本实施例中,凸出区段13
‑
112a和定位区段13
‑
112b可包括相同材质且可为一体成形,且定位区段13
‑
112b可通过铆接形成,因此凸出区段13
‑
112a和定位区段13
‑
112b之间并未通过其他胶水连接。
[1436]
此外,在此实施例中,定位区段13
‑
112b上可更设有一补强接着元件13
‑
p11,直接接触前述定位区段13
‑
112b,以使第一弹性元件13
‑
120更为牢固地固定至承载座13
‑
110。补强接着元件13
‑
p11的材质可相同于第一接着元件13
‑
p1的材质,因此与定位区段13
‑
112b的材质不同。于一些实施例中,补强接着元件13
‑
p11和第一接着元件13
‑
p1可彼此相连,且可为一体成型。
[1437]
综上所述,本发明提供一种光学元件驱动机构,包括一活动部和一第一接着元件。活动部包括一第一元件和一第二元件,其中第一元件经由第一接着元件连接第二元件。
[1438]
虽然本发明的实施例及其优点已公开如上,但应该了解的是,本领域技术人员在不脱离本发明的精神和范围内,当可作更动、替代与润饰。此外,本发明的保护范围并未局限于说明书内所述特定实施例中的工艺、机器、制造、物质组成、装置、方法及步骤,任何所属技术领域中技术人员可从本发明公开内容中理解现行或未来所发展出的工艺、机器、制
造、物质组成、装置、方法及步骤,只要可以在此处所述实施例中实施大抵相同功能或获得大抵相同结果皆可根据本发明使用。因此,本发明的保护范围包括上述工艺、机器、制造、物质组成、装置、方法及步骤。另外,每一权利要求构成个别的实施例,且本发明的保护范围也包括各个权利要求及实施例的组合。
[1439]
虽然本发明以前述数个较佳实施例公开如上,然其并非用以限定本发明。本发明所属技术领域中技术人员,在不脱离本发明的精神和范围内,当可做些许的更动与润饰。因此本发明的保护范围当视随附的权利要求所界定者为准。此外,每个权利要求建构成一独立的实施例,且各种权利要求及实施例的组合皆介于本发明的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
