1.本发明涉及透镜镜筒以及摄像装置。
背景技术:
2.以往,提供了具备对焦透镜并用马达驱动对焦透镜的各种方案(例如参照专利文献1)。另外,期望使透镜镜筒的进一步小型化。
3.现有技术文献
4.专利文献
5.专利文献1:jp特开2015
‑
49334号公报
技术实现要素:
6.第一方面的透镜镜筒构成为具备:通过焦点距离的变更而沿光轴移动的移动筒;所述移动筒所具备的第1驱动部;通过所述第1驱动部相对于所述移动筒沿光轴相对移动的第1透镜;所述移动筒所具备的第2驱动部;以及通过所述第2驱动部相对于所述移动筒沿光轴相对移动的第2透镜,在以第1焦点距离使所述第1透镜配置在最靠被摄体侧的第1状态下将焦点距离变更为第2焦点距离的情况下的所述第1透镜相对于所述移动筒的移动量,比在以所述第1焦点距离使所述第1透镜与所述第1状态相比配置在靠像面侧的第2状态下将焦点距离变更为所述第2焦点距离的情况下的所述第1透镜相对于所述移动筒的移动量小
7.第二方面的透镜镜筒构成为具备:通过焦点距离的变更沿光轴移动的移动筒;所述移动筒所具备的第1驱动部;通过所述第1驱动部相对于所述移动筒沿光轴相对移动的第1透镜;所述移动筒所具备的第2驱动部;以及通过所述第2驱动部相对于所述移动筒沿光轴相对移动的第2透镜,在以第1焦点距离使所述第1透镜配置在最靠被摄体侧的第1状态下将焦点距离变更为第2焦点距离的情况下的所述第1透镜相对于所述移动筒的移动量比在第1状态下将焦点距离变更为所述第2焦点距离的情况下的所述第2透镜相对于所述移动筒的移动量小。
8.第三方面的透镜镜筒构成为具备:通过焦点距离的变更沿光轴移动的移动筒;所述移动筒所具备的第1驱动部;通过所述第1驱动部相对于所述移动筒沿光轴相对移动的第1透镜;所述移动筒所具备的第2驱动部;以及通过所述第2驱动部相对于所述移动筒沿光轴相对移动的第2透镜,在变更了焦点距离的情况下配置在最靠被摄体侧的所述第1透镜的移动量比在变更了焦点距离的情况下配置在最靠被摄体侧的所述第2透镜的移动量小。
9.第四方面的摄像装置构成为具备上述透镜镜筒。
附图说明
10.图1是实施方式的将透镜镜筒2安装于相机主体3而构成的相机1的概念图。
11.图2是透镜镜筒2的内凸轮筒83以及在其内径侧配置的筒构件的立体图。
12.图3是从图2卸下内凸轮筒83且从与图2相反一侧观察的立体图。
13.图4是在从图3卸下马达移动筒100的状态下仅示出5组框50的驱动机构的图。
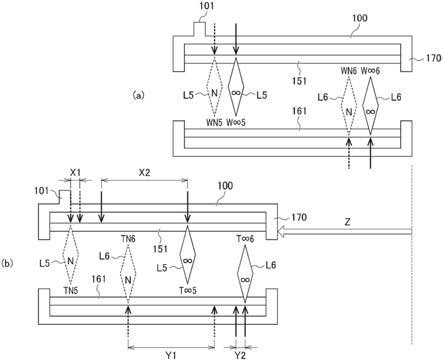
14.图5是说明5组透镜l5以及6组透镜l6的移动状态的图,(a)是变焦位置为广角端的状态、(b)是变焦位置为望远端的状态。
15.图6是说明在将焦点距离从广角端(w)变更为望远端(t)的情况下的、5组透镜l5的移动量、6组透镜l6的移动量、马达移动筒100的移动量的图。
具体实施方式
16.图1是实施方式的将透镜镜筒2安装于相机主体3而构成的作为摄像装置的相机1的概念图。此外,在以下的说明中,将透镜镜筒2的光轴oa方向被摄体一侧设为前侧,将相机主体3一侧设为后侧。将透镜镜筒2的在光轴oa方向上的移动称为“直进”,将以光轴oa为中心的转动称为“旋转”。而且,在与透镜镜筒2的光轴oa正交的径向上,将与光轴oa分离一侧称为外径侧,将靠近光轴oa一侧称为内径侧。
17.相机1具备相机主体3和透镜镜筒2。透镜镜筒2通过在后部(基端部)设有透镜安装部lm,与相机主体3的主体安装部bm卡合,能够装拆地安装于相机主体3。
18.相机主体3为具有将光学成像转换至电信号的摄像元件4,对基于该摄像元件4的摄像数据进行图像处理并记录至未图示的记录部、或者在未图示的显示部显示的所谓数码相机。
19.此外,作为相机,可以为单反相机、无反相机、袖珍数码相机,另外,也可以为双反相机。可以为内置于智能手机或平板电脑的相机。
20.在相机主体3设有电源开关(未图示)。将电源开关的on/off(开/关)信号、表示对焦或光圈值的信号发送至后述的透镜镜筒2的控制部90。
21.透镜镜筒2为从前侧起具有1组透镜l1、2组透镜l2、3组透镜l3、4组透镜l4、5组透镜l5、6组透镜l6以及7组透镜l7、能够改变焦点距离的所谓变焦透镜。
22.1组透镜l1、2组透镜l2、3组透镜l3、4组透镜l4、5组透镜l5、6组透镜l6以及7组透镜l7在变焦时在光轴oa方向上移动。
23.5组透镜l5、6组透镜l6为在后述的马达移动筒100内在对焦时移动的对焦透镜组。本实施方式的透镜镜筒2像这样具有两个对焦透镜组。因此,能够减轻每组对焦透镜组的重量,即使像步进马达这种驱动力很小的执行机构也能够进行驱动。另外,能够提高对焦的性能。
24.1组透镜l1保持于1组框10,1组滑动筒12从1组框10向后方侧延伸。2组透镜l2保持于2组框20。3组透镜l3保持于3组框30。在3组框30的前侧安装有光圈单元32。4组透镜l4保持于4组框40,5组透镜l5保持于5组框50,6组透镜l6保持于6组框60,7组透镜l7保持于7组框70。
25.透镜镜筒2具有外固定筒84以及内固定筒85,变焦环81和对焦环86分别可旋转地设于外固定筒84的外周。从外固定筒84朝向内径侧,按顺序配置有1组滑动筒12、外凸轮筒82、内固定筒85、内凸轮筒83以及马达移动筒100。
26.连结销(未图示)从变焦环81向内径侧延伸。连结销贯穿设于外固定筒84的周槽(未图示),与外凸轮筒82连结。若将变焦环81向周向上旋转,则连结销也在周向上旋转,外凸轮筒82与变焦环81一并旋转。
27.图2是透镜镜筒2的内凸轮筒83以及在其内径侧配置的多个筒构件的立体图。此外,5组透镜l5、6组透镜l6未图示。内凸轮筒83在外径侧设有凸轮从动件92。凸轮从动件92贯穿设于内固定筒85的凸轮驱动用的凸轮槽(未图示),插入至设于外凸轮筒82的直进槽(未图示)。若外凸轮筒82在周向上旋转,则凸轮从动件92在周向上旋转并且直进,内凸轮筒83旋转以及直进。
28.另外,在内凸轮筒83设有驱动马达移动筒100的凸轮槽83a。此外,用于驱动设于内凸轮筒83的马达移动筒100的槽不限于周槽,可以为周槽或者直进槽。
29.图3是从图2卸下内凸轮筒83并从与图2相反一侧的被摄体侧观察的立体图。凸轮销101从马达移动筒100向外径侧延伸。凸轮销101与设于内凸轮筒83的凸轮槽83a以及内固定筒85的直进槽(未图示)卡合。
30.若变焦环81旋转,则内凸轮筒83旋转并直进,马达移动筒100通过凸轮销101而与内凸轮筒83的移动的直进成分对应地以不旋转的方式在直进方向上移动,与之相伴地,5组透镜l5以及6组透镜l6直进。
31.在马达移动筒100的前壁部103与导杆按压构件170(在图1中示出)之间,5组用的主导杆151以及副导杆152、6组用的主导杆161以及副导杆162延伸。主导杆151、副导杆152、主导杆161以及副导杆162在光轴oa方向上的基本相同位置重叠延伸。此外,不限于此,这些导杆只要在光轴oa方向上至少一部分重叠即可。
32.在马达移动筒100固定有例如步进马达的5组用驱动部5m以及例如步进马达的6组用驱动部6m。此外,5组用驱动部5m以及6组用驱动部6m不限于步进马达,也可以为音圈马达或超声波马达等的马达。
33.图4是在从图3卸下马达移动筒100的状态下仅示出5组框50的驱动机构的图。此外,6组框60的驱动机构与5组框50的驱动机构基本相同,因此,以下仅说明5组框50的驱动机构,省略6组框60的驱动机构的说明。
34.在5组框50设有覆盖5组透镜l5的外周的5组保持部51、从5组保持部51的外周向外径侧延伸的主导杆卡合部511、副导杆卡合部512。副导杆卡合部512相对于主导杆151设于大致180度的位置。
35.主导杆卡合部511具有在前后设置的前壁511a以及后壁511b、以及连结前壁511a和后壁511b的侧壁511d。在前壁511a和后壁511b分别设有后述的主导杆151可滑动贯穿的导杆插穿孔511e。
36.遮光部511c从侧壁511d向外径侧突出设置。遮光部511c为在光轴oa方向上延伸规定距离的矩形板状部分。遮光部511c为用于将安装于马达移动筒100的光遮断器(pi)5遮光的构件。能够通过遮光部511c以及pi5检测5组透镜l5的位置。
37.副导杆卡合部512为设有外径侧开放的u字槽的构件。在该u字槽可滑动地插穿有副导杆152。像这样,副导杆卡合部512的u字槽与副导杆152卡合,因此,防止以主导杆151为中心的周向上的旋转。
38.在5组用驱动部5m的光轴oa方向像侧安装有与马达移动筒100螺合的单元框501。导螺杆502从5组用驱动部5m向光轴oa方向后侧延伸,后端可旋转地保持于单元框501。此外,根据5组透镜l5的移动范围,也可以为使导螺杆502向5组用驱动部5m的光轴oa方向被摄体一侧延伸的构成。
39.移动导轨503与导螺杆502咬合。移动导轨503保持于主导杆卡合部511。
40.返回至图1,利用螺丝在内固定筒85的后侧的端部安装有主基板88。主基板88具有控制部90,若对焦环86或者变焦环81旋转,则检测其旋转量并输入至控制部90。
41.另外,根据基于拍摄者的释放半按下等对焦操作也从相机主体3向控制部90输入信号。
42.于是,从控制部90向5组用驱动部5m发送脉冲,驱动5组用驱动部5m。利用5组用驱动部5m的驱动使图4等示出的导螺杆502旋转,与导螺杆502咬合的移动导轨503在光轴oa(沿光轴oa的方向)方向上移动。利用移动导轨503的移动,主导杆卡合部511通过主导杆151被直进引导,5组框50以及5组透镜l5在光轴oa方向上移动。
43.针对6组框60以及6组透镜l6也同样地,在变焦时以及对焦时,利用6组用驱动部6m而向光轴oa方向驱动。
44.像这样,5组透镜l5利用马达移动筒100以及5组用驱动部5m在光轴方向上移动。因此,5组透镜l5的移动量被分为利用马达移动筒100移动的量、以及利用5组用驱动部5m移动的量。6组透镜l6也同样地,6组透镜l6的移动量被分为通过马达移动筒100移动的量、以及通过6组用驱动部6m移动的量。
45.图5是说明5组透镜l5以及6组透镜l6的移动状态的图,(a)是变焦位置为广角端w的状态,(b)是变焦位置为望远端t的状态。
46.在实施方式中,像这样,透镜镜筒2具备:具有凸轮销101、通过焦点距离的变更沿光轴oa移动的马达移动筒100;马达移动筒100所具备的5组用驱动部5m;通过5组用驱动部5m相对于马达移动筒100沿光轴oa相对移动的5组透镜l5;马达移动筒100所具备的6组用驱动部6m;以及通过6组用驱动部6m相对于马达移动筒100沿光轴oa相对移动的6组透镜l6。此外,为了便于说明,在图5的(a)、(b)中,省略了5组用驱动部5m、5组框50、6组用驱动部6m、6组框60、副导杆152、副导杆162等。
47.在以下的说明中,作为一例,以第1焦点距离为广角端w、以第2焦点距离为望远端t进行说明。另外,5组透镜l5在第1焦点距离(广角端w)以及第2焦点距离(望远端t)中,在被摄体距离为极近n的情况下配置在最靠近被摄体侧,在被摄体距离为无限远∞的情况下配置在最靠近像面侧。另外,6组透镜l6在第1焦点距离(广角端w)以及第2焦点距离(望远端t)中,在被摄体距离为极近n的情况下配置在最靠近被摄体侧,在被摄体距离为无限远∞的情况下配置在最靠近像面侧。
48.(1)5组透镜l5的移动量x1与x2的关系
49.如图5的(a)所示,在为第1焦点距离(广角端w)时,用图5的(a)的wn5示出5组透镜l5配置在最靠近被摄体侧的第1状态(wn)下的5组透镜l5的位置。若在图5的(a)示出的wn5的状态下将焦点距离变更为第2焦点距离(望远端t),则5组透镜l5向图5的(b)示出的tn5的位置移动。像这样,将在第1状态(wn)下不变更被摄体距离而是将焦点距离变更为第2焦点距离(望远端t)的情况下的5组透镜l5相对于马达移动筒100的移动量设为x1。
50.另外,在图5的(a)示出的第1焦点距离(广角端w)时,用图5的(a)的w∞5示出5组透镜l5配置在最靠近像面侧的第2状态(w∞)下的5组透镜l5的位置。当在图5的(a)示出的w∞5的状态下将焦点距离变更为第2焦点距离(望远端t)时,5组透镜l5向图5的(b)示出的t∞5的位置移动。像这样,将在第2状态(w∞)下不变更被摄体距离而将焦点距离变更为第2焦点
距离(望远端t)变更的情况下的5组透镜l5相对于马达移动筒100的移动量设为x2。
51.此时,以使移动量x1比移动量x2小的方式,设定马达移动筒100的移动量z。
52.换言之,在图5的(a)示出的wn5的第1状态下将焦点距离变更为第2焦点距离(望远端t)的情况下的5组用驱动部5m的驱动量x1比在图5的(a)示出的w∞5的第2状态下将焦点距离变更为第2焦点距离(望远端t)的情况下的5组用驱动部5m的驱动量x2小。
53.或者,在图5的(a)示出的wn5的第1状态下将焦点距离变更为第2焦点距离(望远端t)的情况下的5组透镜l5相对于主导杆151的移动量x1比在图5的(a)示出的w∞5的第2状态下将焦点距离变更为第2焦点距离(望远端t)的情况下的5组透镜l5相对于主导杆151的移动量x2小。
54.由此,在5组透镜l5在配置在最靠被摄体侧的状态下变更了焦点距离的情况下,由于能够减小5组透镜l5相对于马达移动筒100的移动量x1,所以不需要将主导杆151或马达移动筒100延伸至被摄体侧。因此,能够在光轴方向上设为薄型。
55.(2)5组透镜l5的移动量x1与6组透镜l6的移动量y1的关系
56.如图5的(a)所示,在第1焦点距离(广角端w)时,用图5的(a)的wn6表示6组透镜l6配置在最靠被摄体侧的第1状态(wn)下的6组透镜l6的位置。当在图5的(a)示出的wn6的状态下将焦点距离变更为第2焦点距离(望远端t)时,6组透镜l6向图5的(b)示出的tn6的位置移动。像这样,将在第1状态(wn)下不变更被摄体距离而将焦点距离变更为第2焦点距离(望远端t)的情况下的6组透镜l6相对于马达移动筒100的移动量设为y1。此外,y1可以为在第1状态(wn)下将焦点距离变更为第2焦点距离(望远端t)的情况下的6组透镜l6相对于主导杆161的移动量,也可以作为6组用驱动部6m的驱动量。
57.此时,以使移动量x1比移动量y1小的方式,设定马达移动筒100的移动量z。
58.由此,在从5组透镜l5配置在最靠被摄体侧的状态变更了焦点距离的情况下,由于能够减小5组透镜l5相对于马达移动筒100的移动量x1,所以不需要将主导杆151或马达移动筒100延伸至被摄体侧。因此,能够在光轴方向上设为薄型。
59.(1)以及(2)的效果
60.在马达移动筒100内,在被摄体侧配置有5组透镜l5,在像侧配置有6组透镜l6。
61.当马达移动筒100的配置于被摄体侧的5组透镜l5在其配置在最靠被摄体侧的状态时,若增大因变焦引起的相对于马达移动筒100或导杆151的移动量,则需要增大主导杆151或副导杆152的长度或马达移动筒100的长度,从而变为大型化。
62.根据实施方式,当马达移动筒100的配置于被摄体侧的5组透镜l5在其配置在最靠被摄体侧的状态时,由于减小因变焦引起的相对于马达移动筒100或导杆151的移动量,所以不需要增大主导杆151或副导杆152的长度,能够实现透镜镜筒2的小型化、薄型化。
63.(3)6组透镜l6的移动量y1与y2的关系
64.如图5的(a)所示,在为第1焦点距离(广角端w)时,用图5的(a)的w∞6表示6组透镜l6配置在最靠像面侧的第2状态(w∞)下的6组透镜l6的位置。若在图5的(a)示出的w∞6的状态下将焦点距离变更为第2焦点距离(望远端t),则6组透镜l6向图5的(b)示出的t∞6的位置移动。像这样,将在第2状态(w∞)下不变更被摄体距离而将焦点距离变更为第2焦点距离(望远端t)的情况下的6组透镜l6相对于马达移动筒100的移动量设为y2。此外,y2可以设为在第2状态(w∞)下将焦点距离变更为第2焦点距离(望远端t)的情况下的6组透镜l6相对
于主导杆161的移动量,也可以作为6组用驱动部6m的驱动量。
65.此时,以使y2变得比y1小的方式,设定马达移动筒100的移动量z。由此,在6组透镜l6配置在最靠像面侧的状态下变更了焦点距离的情况下,能够减小6组透镜l6相对于马达移动筒100的移动量y2,所以不需要将主导杆161或马达移动筒100延伸至像面一侧。因此,能够在光轴方向上设为薄型。
66.(4)5组透镜l5的移动量x2与6组透镜l6的移动量y2的关系
67.以在第2状态(w∞)下将焦点距离变更为第2焦点距离(望远端t)的情况下的6组透镜l6相对于马达移动筒100的移动量y2比在第2状态(w∞)下将焦点距离变更为第2焦点距离(望远端t)的情况下的5组透镜l5相对于马达移动筒100的移动量x2小的方式,设定马达移动筒100的移动量z。
68.由此,在6组透镜l6配置在最靠像面侧的状态下变更了焦点距离的情况下,由于能够减小6组透镜l6相对于马达移动筒100的移动量y2,所以不需要将主导杆161或马达移动筒100延伸至像面一侧。因此,能够在光轴方向上设为薄型。
69.(3)以及(4)的效果
70.在马达移动筒100内,在被摄体侧配置有5组透镜l5,在像侧配置有6组透镜l6。
71.在马达移动筒100的配置于像侧的6组透镜l6在其配置在最靠像侧的状态时,若增大因变焦引起的相对于马达移动筒100或导杆161的移动量,则需要增大主导杆161或副导杆162的长度或马达移动筒100的长度,从而变为大型化。
72.根据实施方式,在马达移动筒100的配置于像侧的6组透镜l6在其也配置在最靠像侧的状态时,由于减小因变焦引起的相对于马达移动筒100或导杆161的移动量,所以不需要增大主导杆161或副导杆162的长度,能够实现透镜镜筒2的小型化。
73.(5)5组透镜l5与6组透镜l6的位置关系
74.第1状态(在广角端w,极近状态n)下的6组透镜l6(wn6)与第2状态(在广角端w,无限远状态∞)下的5组透镜l5(w∞5)相比配置在靠像面侧。另外,在第1状态(wn)下将焦点距离变更为第2焦点距离(望远端t)的情况下的6组透镜l6(tn6)与在第2状态(w∞)下将焦点距离变更为第2焦点距离(望远端t)的情况下的5组透镜l5(t∞5)相比配置在被摄体一侧。也就是说,如图5的(a)、(b)所示,在广角端w,在最靠像面侧配置有5组透镜l5的位置(w∞5)和在最靠被摄体侧配置有6组透镜l6的位置(wn6)的位置关系与在望远端t在最靠像面侧配置有5组透镜l5的位置(t∞5)和在最靠被摄体侧配置有6组透镜l6的位置(tn6)的位置关系成为相反。由此,5组透镜l5能够进一步向像面侧移动,6组透镜l6能够进一步向被摄体侧移动,能够在导杆151、161或马达移动筒100的范围内更多地移动。
75.(5)的效果
76.在从极近n状态向无限远∞状态使5组透镜l5和6组透镜l6向同一个方向移动这种透镜镜筒2中,广角端w的5组透镜l5的无限状态(w∞5)与6组透镜l6的极近状态(wn6)的位置关系、以及在望远端t的5组透镜l5的无限状态(t∞5)与6组透镜l6的极近状态(tn6)的位置关系发生变化。
77.由此,能够更有效地使用引导5组透镜l5和6组透镜l6的导杆151、152、161、162,从而能够实现透镜镜筒2的小型、薄型化。
78.(6)图6是说明在将焦点距离从广角端w变更为望远端t的情况下的、5组透镜l5的
极近n状态下的移动量、6组透镜l6的无限远∞状态下的移动量、马达移动筒100的移动量的图。
79.在极近n状态下,将在将焦点距离从广角端w变更为望远端t的情况下的5组透镜l5的移动量设为xx1。在无限远∞状态下,将将焦点距离从广角端w变更为望远端t的情况下的6组透镜l6的移动量设为yy1。另外,将在将焦点距离从广角端w变更为望远端t的情况下的马达移动筒100的移动量设为zz。
80.在实施方式中,如图6的(a)所示,在5组透镜l5的移动量xx1比6组透镜l6的移动量yy1大的情况下的马达移动筒100的移动量zz如图6的(b)所示比在5组透镜l5的移动量xx1比6组透镜l6的移动量yy1小的情况下的马达移动筒100的移动量zz大。
81.(6)的效果
82.通过像这样设为马达移动筒100的移动轨迹,能够减小图5的(b)中的x1以及y2双方。
83.(7)马达移动筒100若透镜镜筒2从广角端w变更为望远端t,则在光轴oa方向上移动。另外,5组透镜l5以及6组透镜l6通过5组用驱动部5m以及6组用驱动部6m而相对于马达移动筒100移动。
84.此时,5组透镜l5以及6组透镜l6相对于马达移动筒100向一个方向移动。即,就5组透镜l5与马达移动筒100的例如凸轮销101的位置关系而言,在合焦于无限远∞的状态下进行了变焦时始终远离。另外,就6组透镜l6与马达移动筒100的例如凸轮销101的位置关系而言,也在合焦于无限远∞的状态下进行了变焦时始终远离。
85.但不限于此,5组透镜l5以及6组透镜l6与马达移动筒100的例如凸轮销101的位置关系也可以在合焦于无限远∞的状态下进行了变焦时始终靠近或者成为固定。
86.此外,在极近n处5组透镜l5以及6组透镜l6与马达移动筒100的位置关系可以在合焦于无限远∞的状态下进行了变焦时始终靠近或者远离或者成为固定。
87.(7)的效果
88.若5组透镜l5以及6组透镜l6与马达移动筒100的位置关系在合焦于无限远∞的状态下进行了变焦时有并非向一个方向移动而是逆向移动的情况(有掉头返回的情况),5组用驱动部5m以及6组用驱动部6m逆向旋转。
89.于是,因5组用驱动部5m以及6组用驱动部6m与导螺杆之间的松动可能会产生相应的延迟。
90.但在实施方式中,5组用驱动部5m以及6组用驱动部6m始终向一个方向旋转,因此,不会产生松动,不会产生移动的延迟等。
91.此外,由于透镜镜筒2与极近状态相比在无限远状态下被变焦的可能性更高,所以只要像实施方式那样设为在无限远状态下不逆向旋转即可。但也可以设为在极近状态下不逆向旋转,还可以设为在无限远状态和极近状态双方的状态下不逆向旋转。
92.在上述实施方式中,说明了将第1焦点距离设为广角端w、将第2焦点距离设为望远端t,但不限于此。例如可以为第1焦点距离为中路(middle)1,第2焦点距离为焦点距离比中路1长的中路2的状态。
93.另外,在上述的实施方式中,说明了5组透镜l5在广角端w以及望远端t在被摄体距离为极近n的情况下配置在最靠被摄体侧,在被摄体距离为无限远∞的情况下配置在最靠
像面侧,但不限于此。例如也可以在被摄体距离为无限远∞的情况下配置在最靠被摄体侧,在被摄体距离为极近n的情况下配置在最靠像面侧。
94.另外,说明了6组透镜l6在为第1焦点距离(广角端w)以及第2焦点距离(望远端t)时,在被摄体距离为极近n的情况下配置在最靠被摄体侧,在被摄体距离为无限远∞的情况下配置在最靠像面侧,但不限于此。例如也可以在被摄体距离为无限远∞的情况下配置在最靠被摄体侧,在被摄体距离为极近n的情况下配置在最靠像面侧。
95.此外,不限于上述实施方式,也可以为任意的组合。
96.附图标记说明
97.oa:光轴、2:透镜镜筒、3:相机主体、5m:5组用驱动部、50:5组框、51:5组保持部、6m:6组用驱动部、60:6组框、81:变焦环、82:外凸轮筒、83:内凸轮筒、84:外固定筒、85:内固定筒、86:对焦环、90:控制部、92:凸轮从动件、100:马达移动筒、101:凸轮销、103:前壁部、151:主导杆、152:副导杆、161:主导杆、162:副导杆、170:导杆按压构件、501:单元框、502:导螺杆、503:移动导轨、511:主导杆卡合部、511a:前壁、511b:后壁、511c:遮光部、511d:侧壁、511e:导杆插穿孔、512:副导杆卡合部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
