具有受到引导而可运动的光学元件的光学组件和用于引导第一光学元件和第二光学元件运动的方法
1.本发明涉及一种具有第一光学元件和第二光学元件的光学组件,所述光学元件以受到引导而可运动的方式布置。
2.为了扩展光学系统的功能,可以使用光学组件,这些光学组件具有两个可相对于光轴彼此移位的光学元件,尤其两个可垂直于光轴彼此移位的光学元件。可移位的光学元件在此也可以是具有自由曲面的元件,这些元件有时也被称为阿尔瓦雷斯元件(alvares
‑
element)。具有这种组件的光学系统例如在de 10 2008 001 892 a1、wo 2007/037691 a2、us 2017/0227747 a1和us 2013/0278911 a1中描述。借助于具有自由曲面的光学元件,例如可以有针对性地矫正不同焦平面的成像误差,如在de 10 2013 101 711 a1中所述。此外,具有自由曲面的可垂直于光轴移位的光学元件还提供了以下可能性:有针对性地将成像误差引入光学系统,例如以便在相机镜头中引入柔焦效果。这例如在de 10 2014 118 383 a1中进行了描述。de 10 2015 116 895 b3描述了具有自由曲面的可垂直于光轴移位的光学元件的类似用途。
3.光学元件垂直于光轴移位时的运动量通常仅有几毫米。在此对运动的引导忠诚度提出了非常高的要求。在调节行程大于3mm时,偏差典型地应小于1μ。为了实现这一点,每个光学元件的位置和引导轨迹(f
ü
hrungsbahn)都要相对于光学系统进行调整。由于调整光学元件的引导轨迹会影响其位置并且反之亦然,因此必须存在耦合的调整点,这使调整变得复杂。调整完成后,调整元件(例如调整螺丝)仍保留在光学系统中。结果导致结构空间需求增加。此外,在光学系统的使用寿命期间,设置现象(setzungserscheinung)可能需要进行重新调整。所描述的调整因此是高耗费并且是成本密集型的,并且因此仅在有限程度上适用于批量生产。
4.从wo 2013/064689 a2中已知一种具有两个光学元件的光学组件,其中一个光学元件具有导向槽和导轨。另一个光学元件具有伸入到导向槽中的突起和接合到第一光学元件的导轨中的导轨。
5.本发明的目的是,提供一种用于光学系统的光学组件,所述光学系统包括第一光学元件和第二光学元件,所述光学元件以各自受到引导而可运动的方式布置,其中克服或至少减少了至少一些参照现有技术所描述的缺点,并且其中受到引导的光学元件的数量并不限制于两个。
6.本发明的第二目的在于,提供一种用于操纵电磁波的波前的波前操纵器,其中实现了其光学元件的有利的导向件,所述导向件克服或至少减少了至少一个参照现有技术所提到的缺点,并且其中受到引导的光学元件的数量并不限制于两个。
7.本发明的第三目的在于,提供一种用于引导第一光学元件和第二光学元件运动的方法,所述方法克服或至少减少了至少一个参照现有技术所提到的缺点,并且其中受到引导的光学元件的数量并不限制于两个。
8.第一目的通过根据权利要求1所述的光学组件来实现,第二目的通过根据权利要求20所述的波前操纵器来实现,并且第三目的通过根据权利要求21所述的方法来实现。从
属权利要求包含本发明的有利的设计方案。
9.根据本发明的光学组件至少包括:第一光学元件,所述第一光学元件可以被设计为透射光学元件或反射光学元件;以及第二光学元件,所述第二光学元件同样可以被设计为透射光学元件或反射光学元件。所述光学元件以各自受到引导而可运动的方式布置。在此,光学组件的光学元件尤其沿轴线彼此前后布置,并且可以被引导可平行于与轴线垂直的平面运动。在根据本发明的光学组件中,存在用于光学组件的光学元件中的至少两个光学元件的共用的导向件,所述导向件在引导运动时提供所述两个光学元件共用的引导轨迹。引导轨迹在此是引导进行所沿的轨迹,并且明确定义了光学元件运动所沿的运动轨迹。运动轨迹在此不需要彼此相同。例如,如果光学元件沿轴线彼此前后布置并且可以平行于与这个轴线垂直的平面运动,那么运动轨迹可以具有彼此间的间距,但其中由于引导轨迹是共用的,因此运动轨迹相对于彼此是固定的。在本发明的意义上,在此应将在物体位移时引起该位移沿预定的运动轨迹进行的任意装置视为导向件。预定的运动轨迹在此明确与引导轨迹相关。在本发明的范围内,引导轨迹可以是直线的或弯曲的,因此可以实现引导这两个光学元件线性运动或这两个光学元件曲线运动,例如完整的圆周运动或沿圆弧的运动。
10.借助于共用的导向件在共用的引导轨迹上引导光学组件的光学元件的至少两个光学元件使得调整光学元件相对于彼此的运动轨迹变得多余。因此,根据本发明的组件典型地仅需要相互独立的手段来调整具有共用的导向件的至少两个光学元件相对于彼此的位置以及共用的引导轨迹。由于导向件作用于两个光学元件,因此不需要调整光学元件相对于彼此的引导轨迹。由此,减少了用于调整所需的时间。此外,调整手段的数量减少实现了减小光学组件的复杂性,这同时提高了机械结构的刚性。在此,较高的稳定性和刚性是由于需要更少的机械部件。这明显有助于降低批量生产成本。此外,共用的引导轨迹保证了高水平的长期稳定性,这是因为设置现象减少了。
11.所述共用的导向件包括至少一个导向元件,具有所述共用的导向件的所述至少两个光学元件各自借助于支承元件支承在所述至少一个导向元件上。在此,支承元件可以构成滑动支承机构或滚动支承机构的一部分。在此,导向元件(支承元件沿该导向元件滑动或滚动)确定引导轨迹。在此,在光学组件的复杂性方面有利的是,使用滑动支承机构,使得支承元件仅需要支承面。相比之下,滚动支承机构虽然提供更小的摩擦,然而为此结构更复杂,这与使用滑动支承机构相比提高了批量生产成本。通常,支承机构类型的选择取决于可供使用的结构空间和对调节运动的要求,例如调节周期的数量、调节动态、使用寿命、耐磨性能、颗粒侵入等。在此,已经提到的滑动支承机构特别适用于最小的结构空间,其中然而移动速度与滚动支承机构相比是更小的并且最大大约为1m/s。
12.由于存在与光学元件分开的导向元件,因此与从wo 2013/064679a2已知的导向件不同的是,不需要受到引导的光学元件之间的引导接触,因此也可以沿同一引导轨迹引导多于两个光学元件。在此,引导几何结构不直接位于光学元件上,而是与其进行连接。独立的引导几何结构允许对引导几何结构(引导轨迹)进行高精度处理,由此可以实现非常精确的引导运动。
13.所述支承元件可以直接形成在具有所述共用的导向件的所述至少两个光学元件上。然而,尤其折射光学器件的典型材料(即矿物玻璃或有机玻璃)由于其耐磨性能而对于建造具有永久性良好支承特性的导向件而言不是最佳的。因此在替代性的设计方案中,具
有所述共用的导向件的所述至少两个光学元件可以各自布置在支座中。于是,所述支承元件形成在所述支座上。支座可以以这种方式构成滑轨,光学元件借助于这些滑轨可以各自沿共用的引导轨迹运动。这个变体尤其在磨损方面以及在制造和批量生产成本的角度来看是有利的。
14.所述至少一个导向元件可以包括至少一个导轨,具有所述共用的导向件的所述光学元件各自借助于所述支承元件支承在所述至少一个导轨上。尤其,所述至少一个导向元件可以至少包括第一导轨和第二导轨,于是其中具有所述共用的导向件的所述至少两个光学元件各自借助于所述支承元件支承在至少所述第一导轨以及所述第二导轨上。两个导轨是有利的,因为通过导向件作用在光学元件或其支座上的任何力或扭矩都是对称地起作用的。
15.在本发明的实施变体中,所述至少一个导轨被设计为至少一个导向杆,所述至少一个导向杆被所述支承元件至少部分地包围。在此,所述支承元件可以包围接合在所述至少一个导向杆上的滚动体。替代性地,所述支承元件可以是支承面,所述支承面接触导向杆。所述支承面尤其可以接触所述导向杆,使得存在3点支承。在这个实施变体中,导向元件具有特别简单并且可以成本有效地生产的结构。所述至少一个导向杆的截面可以是圆形、椭圆形、多边形等,其中所述至少一个导向杆的截面尤其也可以与使用的支承元件的类型相适配。为了使所述至少一个导向元件与这些支承面之间的摩擦接触保持得较小,在以支承面作为支承元件的所有实施变体中有利的是,所述支承面接触所述至少一个导向元件,使得存在3点支承。此外,3点支承可以提供支承面相对于导向元件的自调整。
16.在本发明的实施变体中,所述至少一个导轨具有至少一个导向槽,并且所述支承元件被设计为接合到所述至少一个导向槽中的突起。在此,在所述至少一个导向槽与接合到所述至少一个导向槽中的突起之间布置有滚动体(例如滚珠、滚柱或滚针)。
17.为了一方面为所述支承元件与另一方面为所述至少一个导向元件之间的可靠接触,所述至少一个导向元件和所述支承元件可以相对于彼此预紧。在此有利的是,预紧力仅作用在支承元件与至少一个导向元件之间的接触点上,因为以这种方式可以避免光学元件或其支座的变形。然而附加地或替代性地还可以以如下方式实现可靠接触:所述支承元件和所述至少一个导向元件形状配合地配对。
18.为了防止支承元件与至少一个导向元件咬合或咬紧并且抵消摩擦热的产生,可以对一方面为这些支承元件和另一方面为该至少一个导向元件使用合适的材料配对。然而更有利的是,使用相同的材料,因为由此可以避免不同的热膨胀系数。在这种情况下还有利的是,所述支承元件和/或所述至少一个导向元件具有减小摩擦的表面涂层,即滑动覆层,例如特氟龙(teflon)等。如果滑动覆层施加到这些支承元件和该至少一个导向元件上,则该滑动覆层在施加后还可以针对这些支承元件和该至少一个导向元件共同进行再处理,这可以实现最高的引导精度。
19.在根据本发明的光学组件的特别的设计方案中,在具有所述共用的导向件的所述至少两个光学元件的每个光学元件中,所述支承元件各自具有至少一个沿所述至少一个导向元件延伸的凹部或中断部。具有所述共用的导向件的所述至少两个光学元件中的至少一个光学元件的至少一个支承元件布置在所述凹部或中断部中。在此,所述凹部或中断部沿所述至少一个导向元件具有比布置在所述凹部或中断部中的支承元件更大的尺寸。以这种
方式,布置在凹部或中断部中的支承元件的运动不会受到妨碍,因此具有共用的导向件的至少两个光学元件相对于彼此的运动不受阻碍。这种特别的设计方案可以实现自定心和在引导中产生的摩擦力的大致对称分布。
20.根据本发明的光学组件还可以包括用于引入实现引导运动的调节力的驱动装置,所述驱动装置至少间接地(例如在存在支座时藉由支座)作用于具有所述共用的导向件的所述至少两个光学元件的至少一个光学元件。以这种方式,光学组件不需要具有与外部传动机构的接口。在此,驱动装置例如可以包括线性驱动器或旋转作用的驱动器。如果光学元件的运动是线性运动,但驱动装置包括旋转作用的驱动器,则光学组件还具有将旋转运动转换成线性运动的传动机构。
21.所述光学组件的驱动装置可以包括针对具有所述共用的导向件的所述至少两个光学元件中的每个光学元件的自己的驱动器。这是有利的,因为在使用单独的驱动器时,调节运动在整个可用的运动范围内进行并且因此形成调整自由度。由此,对零件的公差以及调整的要求较低。
22.为了能够校正光学元件的位置,有利的是,所述光学组件包括至少一个检测器,所述检测器用于检测具有所述共用的导向件的所述至少两个光学元件的位置。任何由于磨损产生的有误差的定位例如可以在调节的范围内通过调节运动进行补偿。
23.为了能够避免由于作用于光学元件的、由位移的线缆引起的力造成的错误定位,有利的是,所述光学组件包括的供电元件位置固定地布置,使得在引导具有所述共用的导向件的所述至少两个光学元件运动时,所述供电元件不随它们一起运动。
24.根据本发明,还提供一种用于操纵电磁波的波前的波前操纵器。根据本发明的波前操纵器包括根据本发明的光学组件以用于操纵波前。为此,所述光学组件的光学元件尤其可以设有自由曲面。在其他意义上,自由曲面可以理解为能够尤其借助于区间定义函数、尤其二次连续可导的区间定义函数来形成的复杂曲面。适合的区间定义函数的示例为(尤其分段)多项式函数(尤其多项式样条,例如双三次样条、四阶或更高阶的高阶样条或多项式非均匀有理b样条(nurbs))。与此不同的是简单曲面,例如球面曲面、非球面曲面、柱面曲面、至少沿着主子午线描述为圆的环曲面。自由曲面尤其不需要具有轴对称性和点对称性并且可以在曲面的不同区域中具有不同的平均曲面折射率值。在光学元件上制备自由曲面一般通过切削加工光学元件(即例如通过铣制)在cnc方法的范围内进行,其中基于对曲面的数学描述以数控方式来制备该自由曲面。但是还可以将自由曲面压制成生坯。为此必须用cnc方法以用于取决于温度的收缩的对应附加值来处理压制阴模。
25.本发明还提供一种用于引导至少第一光学元件和第二光学元件运动的方法。在此,所述光学元件可以是透射光学元件或反射光学元件。所述光学元件尤其可以沿轴线彼此前后布置,并且平行于与轴线垂直延伸的平面彼此平行运动。根据本发明,所述光学组件的光学元件的至少两个光学元件的运动基于所述光学元件共用的导向件进行,所述导向件提供对应的光学元件共用的引导轨迹。
26.与根据本发明的方法相关联的优点对应于参照根据本发明的光学组件所描述的优点。参考说明书的对应部分以避免重复。
27.本发明的其他特征、特性和优点从参照附图对实施例的后续说明得出。
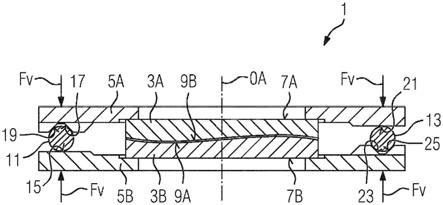
28.图1以截面视图示出了具有两个可运动的光学元件的光学组件的第一实施例,其
中这两个光学元件受到共同引导。
29.图2以透视图示出了图1的光学组件。
30.图3以截面视图示出了具有两个可运动的光学元件的光学组件的第二实施例,其中这两个光学元件受到共同引导。
31.图4以俯视图示出了图3的光学组件。
32.图5以截面视图示出了具有两个可运动的光学元件的光学组件的第三实施例,其中存在这两个光学元件共用的导向件。
33.图6以透视图示出了图5的光学组件。
34.图7以透视图示出了图5的光学组件的光学元件的支座。
35.图8以截面视图示出了具有两个可运动的光学元件的光学组件的第四实施例,其中存在这两个光学元件共用的导向件。
36.图9示出了具有驱动装置的光学结构元件,该驱动装置用于将驱动力引入到光学结构元件的光学元件中,以实现引导运动。
37.图10示出了具有牵引传动机构的旋转驱动器。
38.图11示出了具有杠杆传动机构的旋转驱动器。
39.图12以示意性图示示出了具有三个可运动的光学元件的光学组件的实施例,其中存在这三个光学元件共用的导向件。
40.下面借助示出光学元件的不同导向件的实施例来描述本发明。在此,图1至图4示出了具有导向件的实施例,这些导向件包括呈导向杆形式的导轨,并且图5至图8示出了具有导向件的实施例,这些导向件包括具有导向槽的导轨。尽管在实施例中仅描述了具有线性引导轨迹的导向件,但本领域技术人员会认识到,基本原理也可以在提供曲线的引导轨迹(尤其然而不仅仅是圆形的引导轨迹)的导向件中应用。
41.图1和图2示出了根据本发明的光学组件1的第一实施例。光学组件1包括两个光学元件3a和3b,这些光学元件各自布置在支座5a、5b中。光学元件3a、3b中的每个光学元件都具有平面7a、7b和自由曲面9a、9b,其中在本实施例中的光学元件3a、3b被布置成使得它们的自由曲面朝向彼此。然而这些自由曲面也可以布置在背离彼此的侧面上,或者可以在光学元件3a、3b的两个侧面上布置自由曲面。具有自由曲面9a、9b的光学元件3a、3b沿光轴oa彼此前后布置,并且以平行于与光轴oa垂直延伸的直线可移位的方式支承。
42.光学元件3a、3b用作波前操纵器,其中对波前的操纵效果的程度取决于光学元件3a、3b沿直线移位的程度。典型地,为了实现波前操纵,光学元件3a、3b沿直线移位的量相同,然而是在相反方向上。然而为了精细矫正的目的,可以有利的是,每个光学元件可以移位各自的量。借助于对波前的操纵,例如可以补偿安装有光学组件1的光学系统的成像误差。通过这两个光学元件3a、3b的移位的量可以补偿对出现的成像误差强度的矫正。在光学元件3a、3b可以移位各自的量时,还存在光学精细矫正的可能性。在de 10 2013 101 711a1中描述了通过波前操纵器的光学元件的移位来补偿成像误差。因此在补偿成像误差方面参考该文件。
43.替代于补偿成像误差,存在如下可能性:通过光学元件3a、3b的相反移位将成像误差引入安装有光学组件1的光学系统中,以便例如在柔焦镜头中实现球面像差,该球面像差实现柔焦效果。de 10 2014 118383a1中描述了如何能够实现这种柔焦效果。因此在实现柔
焦效果方面参考该文件。
44.在光学元件3a、3b运动时,需要较高的精确度。当光学元件3a、3b各自的调节行程典型地大于3mm时,与设定位置的偏差应尽可能不大于5μm,并且优选地小于1μm。为了实现这一点,需要高度精确地调整光学元件3a、3b的位置以及光学元件3a、3b的运动轨迹,以保证光学元件在每次移位后具有正确的调节行程,并且在光学结构元件中占据正确的位置。
45.为了使光学元件3a、3b相对于彼此的运动轨迹的调整变得多余,光学结构元件1具有这两个光学元件3a、3b共用的导向件,该导向件在第一光学元件3a和第二光学元件3b运动时提供这两个光学元件3a、3b共用的引导轨迹。共用的引导轨迹在此保证光学元件3a、3b的调节运动总是相对于彼此进行调整。运动轨迹相对于彼此的失调在此是不可能的,因为这两个光学元件的引导轨迹不能相对于彼此位移。
46.通过共用的引导轨迹,不仅消除了调整光学元件3a、3b相对于彼此的运动轨迹的需要(如果光学元件3a、3b中的每个光学元件具有带有自己的引导轨迹的自己的导向件,则会是这种情况),而且还减少了光学组件1的构件的数量。由此减小光学组件1的复杂性降低了制造成本,这尤其在批量制造方面是有利的。
47.共用的引导轨迹在本实施例中由两个呈导向杆11、13形式的彼此平行导向元件构成,支座5a、5b的支承面15、17和19或21、23和25贴靠这些导向杆。导向杆11、13构成导轨,在光学元件3a、3b的调节运动中,被设计为滑动面的支承面15、17、19和21、23、25在这些导轨上滑动。为了易于滑动,滑动面15、17、19、21、23、25在本实施例中设有减小摩擦的涂层,例如ptfe涂层(ptfe:polytetrafluorethylen,聚四氟乙烯)。附加地或替代性地,导向杆11、13也可以设有减小摩擦的涂层,例如ptfe涂层。支承面15、17、19、21、23和25形成支承元件,这些支承元件与导向杆11、13共同构成光学组件的导向件。支承点本身优选地被实施为3点接触,即,支承元件(在此为支承面15、17、19、21、23和25)接触导向元件(在此为导向杆11、13)的截面的三个点。在本实施例中,这通过以下方式实现:支承面17、19和23、25构成v形槽,该v形槽在期望的运动方向上延伸,并且该v形槽相应地与第三支承面15、21相对。
48.尽管导向杆在本实施例中具有正圆形的截面,但原则上它们也可以有其他截面。替代性的截面例如是椭圆形截面、多边形截面或甚至不规则截面,而替代性的截面并不限于提及的截面。
49.当光学组件1安装到光学设备中时,导向杆11、13固定地与光学设备的壳体连接,使得导向件相对于光学设备的光轴进行限定,该光轴典型地与光学组件的光轴oa重合。
50.为了确保支承面15、1、19、21、23、25与导向杆11、13的可靠接触,支座5a、5b是相对于彼此预紧的。为了进行预紧而引入支座的预紧力f
v
优选地在支承面15、17、19、21、23、25与相应的导向杆11、13的接触位置的区域中被引入支座5a、5b,以避免支座5a、5b由于引入的力而变形或使变形至少尽可能地保持较小。
51.在参照图1和图2描述的实施例中,光学元件3a、3b被包含在支座5a、5b中。然而原则上还可以省去支座5a、5b,并且支承面15、17、19、21、23、25直接形成在光学元件3a、3b中。然而,折射光学元件的材料由于其耐磨性能一般不适合构造具有持久良好支承和滑动特性的支承面。就此而言,支承面15、17、19、21、23、25在支座5a、5b中的布置方式对于光学元件3a、3b是有利的。关于在调节运动中引导支座5a、5b有利的是:在这两个支座5a、5b中,v形槽分别接合在导向杆11、13上。虽然这在原则上可以以如下方式实现,即,支承面15、21由诸如
支承机构17、19和23、25等支承面代替,使得在导向杆11、13上接合有彼此相对的v形槽,然而由此失去了3点支承(即自定心)的优点,并且提高了摩擦。尽管如此,为了实现v形槽接合导向杆11、13的彼此相反的侧面,存在以下可能性:支座5a、5b分成区域27、29,其中v形槽位于哪一个支座中取决于相应的区域27、29。在v形槽17、19位于图1和图2中上方的支座5a中的那些区域29中,图1和图2中下方的支座5b具有平坦的支承面15,而在v形槽23、25位于图1和图2中下方的支座5b中的那些区域27中,图1和图2中上方的支座5a具有平坦的支承面21。此外有利的是,如在图1和图2中展示的,在支座以v形槽贴靠一个导向杆的区域27、29中,这个支座以平坦的支承面贴靠另一个导向杆,并且反之亦然。
52.下面参照图3和图4描述根据本发明的光学组件的第二实施例。
53.光学组件1的第二实施例与第一实施例的不同之处仅在于用于引导第一光学元件3a运动和引导第二光学元件3b运动的导向件的设计。光学元件3a、3b本身与第一实施例的光学元件没有区别。支座5a、5b除了支座借以支承在导向杆11上的支承元件的设计之外也没有区别。
54.第二实施例的支承元件被设计为滑动支承衬套31a、31b,这些滑动支承衬套在导向元件上滑动,该导向元件如在第一实施例中一样被设计为呈导向杆11形式的导轨。在支座5a中,多个这种滑动支承衬套31a沿导向杆11的延伸方向彼此前后间隔开地布置。在第二支座5b中存在凹部33b,在该凹部中,第一支座5a的滑动支承衬套31a可以沿导向杆11运动。凹部33b沿导向杆11的延伸尺寸被选择成大到允许第一支座5a的滑动支承衬套31a在第一光学元件3a的整个所需的调节行程上移位。对应地,第二支座5b同样具有多个滑动支承衬套31b,这些滑动支承衬套位于第一支座5a的凹部33a中。凹部33a沿导向杆11的延伸方向具有如下尺寸,使得布置在其中的第二支座5b的滑动支承衬套31b可以在第二光学元件3b的整个调节行程上沿导向杆11运动。如在第一实施例中一样,在第二实施例中也存在两个导向杆,然而在图3和图4中仅展示了其中一个导向杆。如在第一导向杆11的区域中一样,支座5a、5b在第二导向杆的区域中具有滑动支承衬套和凹部,这些凹部可以实现滑动支承衬套在整个调节行程上运动。
55.在第二实施例中,与第一实施例的不同之处在于,不需要支座(5a、5b)相对于彼此的预紧,因为支承衬套31a、31b由于形状配合而不能与导向杆失去接触。
56.在图5至图7中展示了根据本发明的光学组件的第三实施例。第三实施例的光学元件3a、3b与前两个实施例中的光学元件相对应。因此,为了避免重复,不再对其进行描述。第三实施例与前两个实施例的不同之处在于导向件的类型,该导向件在引导第一光学元件3a运动和引导第二光学元件3b运动时为这两个光学元件提供共用的引导轨迹。
57.作为导向元件,在第三实施例中存在两个导轨35、37,这些导轨各自具有v形槽39、41。导轨35、37在将光学组件安装到光学设备中时直接或间接地被紧固在设备的壳体上。导轨35、37的v形槽39、41作为支承元件接合支座5a、5b的屋顶边缘状的区段43a、45a、43b、45b。屋顶边缘区段43a、43b、45a、45b的表面是支承面,这些支承面与v形槽39、41的同样构成支承面的表面分别构成滑动支承机构。在此,共用的引导轨迹由具有v形槽39、41的导轨35、37确定。
58.屋顶边缘形的区段43a、45a、43b、45b沿导轨35、37不在支座5a、5b的整个延伸尺寸上延伸,而是各自具有中断部47a、47b、49a、49b,于是相应另一个支座5a、5b的屋顶边缘形
的区段43a、45a、43b、45b被布置在这些中断部中(参见图7)。在此,中断部沿导轨35、37具有尺寸,这些尺寸大于相应的中断部47a、47b、49a、49b中的屋顶边缘形的区段的尺寸。在此,中断部47a、47b、49a、49b的延伸尺寸被选择成大到使得位于其中的屋顶边缘状的突起可以在相应的光学元件3a、3b的整个调节行程上沿导轨35、37移位。光学元件3a、3b沿引导轨迹移位的难易程度可以通过合适的预紧力f
v
来调节,该预紧力将v形槽37、39朝向屋顶边缘状的区段43、45的方向预紧。
59.为了能够将这两个导轨35、37紧固在光学设备的其中应安装有光学组件的壳体上,存在以下可行方案:将导轨35、37装配到载体元件上(在图5至图7中未展示),该载体元件随后进而装配到光学设备的壳体上。于是,载体元件确定光学组件沿光学设备的光轴的位置。此外,该可行方案可以实现光学组件的方位对准(即光学组件在与光轴垂直的平面内的取向)以及光学组件的定中心。定中心和对准例如在实践中可以通过螺钉紧固面、定心环和方位确定元件来实现。引导轨迹的运行方向因此可以明确地与光学设备的接口对准或相关。
60.在图8中展示了根据本发明的光学组件的在图5至图7中展示的实施例的改型方案。在图5至图7中展示的实施例中,屋顶边缘状的突起43a、43b、45a、45b的表面与v形槽39、41的表面一起构成滑动支承机构,而在图8中展示的实施例中的支承机构被设计为滚动支承机构。为此,具有滚针53的保持架位于屋顶边缘状的突起43a、43b、45a、45b的表面之间。在此,保持架沿导轨35、37的延伸尺寸小于屋顶边缘状的突起沿导轨的延伸尺寸。通过合适地选择保持架51相对于屋顶边缘状的突起43a、43b、45a、45b的延伸尺寸的尺寸,可以实现保持架51在其在光学元件3a、3b的位移期间运动时将可提供的调节行程限制为不低于通过中断部47a、47b、49a、49b实现的调节行程。代替参照图8所描述的滚针53,在保持架51中还可以布置有滚子或滚珠。在滚子保持架的情况下,可能使用平行滚子保持架,其中导向件的设计除了保持架之外大体上与在图8中展示的实施方式相对应,或者使用交叉滚子保持架,其中支承元件不像导轨一样具有屋顶边缘状的突起,而是具有v形槽。然而,滚针保持架比滚子保持架更紧凑,因此滚针保持架在所需的结构空间方面相对于滚子保持架是有利的。
61.为了引入使承载光学元件3a、3b的支座5a、5b沿其引导轨迹位移所需的调节力,存在不同的可行方案。引入实现位移的调节力例如可以通过联接线性作用的驱动器(例如所谓的音圈马达、线性马达、压电执行器、压电步进驱动器等)或者通过联接旋转作用的驱动器(例如直流马达、步进马达,基于压电步进驱动器的旋转驱动器等)并且从旋转运动转换成线性运动(例如借助于凸轮传动机构、杠杆传动机构、螺旋齿轮传动机构、牵引传动机构等)进行。根据驱动器,驱动力或驱动扭矩必须具有足够的大小,以施加对应的调节力。在此,尤其还要考虑到导向元件与支承元件之间出现的摩擦力以及在传动机构或传动中可能的摩擦力。
62.支座5a、5b要么借助于共用的、接合在两个支座5a、5b上的驱动器来运动,要么各自借助于自己的驱动器来运动。使用自己的独立驱动器提供如下优点:提供在整个调节行程上可以用于补偿光学误差的额外的自由度。因此,对零件的公差以及零件的调整的要求较低。
63.在图9中展示了具有用于支座5a、5b的单独的驱动器的光学组件1的示例。导轨37、39被紧固在载体元件55上,该载体元件可以安装到光学设备中。在载体元件55上还布置有
两个直流马达57a、57b,这些直流马达各自作用在支座5a、5b中的一个支座上以施加调节力。借助于主轴传动机构,直流马达57a、57b的旋转运动被转换成支座5a、5b的线性运动。还可以应用其他的旋转作用的马达代替直流马达。同样可以代替旋转作用的马达而使用线性马达,其中随后可以省去用于将旋转运动转换成线性运动的传动机构。除了线性马达之外,合适的线性作用的驱动器是压电致动器、压电步进驱动器等。在使用压电致动器和压电步进驱动器时,在毫米范围内的较大的调节行程下通常需要杠杆传动机构,因为压电致动器一般仅允许在几微米范围内的调节运动。然而为此可以实现动态性高的非常快速的调整运动。如果使用工作方式基于粘滑效应的压电步进驱动器,有利的是,在导向件中应用如参照图8所描述的滚动支承机构,由此可以可靠地实施调节运动。在本实施例中,相应的驱动器57a、57b的固定部分被布置在载体元件55上,因此用于给驱动器57a、57b供电的电力线缆58a、58b不必跟随运动。因此可以避免由于线缆引入运动的光学元件的力而导致的错误定位。
64.有利的是,可以检测光学元件3a、3b沿其引导轨迹的位置。由于光学元件3a、3b与支座5a、5b固定连接,因此用绝对测量系统或相对测量系统加参考标记(例如终点位置)足以检测支座5a、5b沿引导轨迹的位置。为此,例如可以在支座5a、5b上施加具有集成的或单独的终点位置标记或参考位置标记的线性刻度。线性刻度在此可以以磁性或光学方式起作用。可以由测量头、叉形耦合器或反射耦合器构成的传感器与载体元件55固定连接。
65.通过检测光学元件3a、3b沿引导轨迹的位置可以实现建立控制回路,通过该控制回路可以实现光学元件3a、3b的定位的特别精确的高精度。为了检测终点位置和/或参考位置,例如可以使用开关触点、例如借助于反射耦合器分析的对比度差异、叉形光学耦合器等。
66.尽管在本实施例中,刻度布置在支座5a、5b上,并且传感器布置在载体元件55上,但还存在相反布置的可能性,即刻度布置在载体元件55上,而传感器布置在运动的支座5a、5b上。然而传感器位置固定地布置在载体元件55上具有如下优点:不必使电连接线跟随运动,因此可以避免由于通过线缆引入运动的光学元件的力而导致的错误定位。
67.在图9中展示的实施例中,支座5a、5b各自借助于自己的马达运动。然而替代性地还存在仅设置唯一的马达的可能性,该马达作用于两个支座5a、5b,以使这些支座彼此相反地沿引导轨迹移位。这例如可以借助于牵引传动机构实现,如在图10中示出。直流马达或步进马达61将其旋转运动借助于驱动轮63传递给环绕的牵引机构,例如皮带、链条、绳索等。为了改变线性运动的方向,存在对应的转向轮65。在牵引机构62实施线性运动的区域中,存在接口67a、67b,牵引机构62借助于这些接口与支座5a或支座5b联接。为了保持较低的驱动松弛度,牵引传动机构还包括张紧轮69,借助于该张紧轮可以张紧牵引机构62。在此,张紧轮69的调整可以在光学结构元件投入使用时固定地进行,其中应不时进行检查。替代性地,可以进行自动调整,该自动调整例如可以通过永久作用的弹簧机构来实现,该弹簧机构保持牵引机构62张紧。
68.在图10中示出的牵引传动机构的图示中,牵引机构62仅贴靠驱动轮63。替代性地存在以下可能性:牵引机构62多次缠绕驱动轮63,由此可以在方向逆转时使驱动松弛度降到最低。
69.在图11中示出了具有将旋转的驱动运动转换成线性运动的传动机构的旋转驱动
器的另一个实施变体。此图示出了光学设备的壳体的构件71,根据本发明的光学组件的导向杆11、13被紧固在该构件上。支座5a、5b具有设有孔的支承元件73a、73b、75a、75b,导向杆11、37延伸穿过这些孔。包围导向杆11、13的球形保持架77位于这些孔中,即实现滚动支承引导。当支座5a、5b位移一定的调节行程时,保持架77各自后退一段距离,该距离与调节行程的一半相对应。如在第二实施例中一样,由于形状配合保证了支承元件73a、73b、75a、75b与导向杆11、13之间的接触,因此不需要进行预紧。
70.在图11中示出的实施例中,存在直流马达或步进马达79作为作用于摇杆80的旋转驱动器。摇杆80的两个端部各自藉由推拉杆81a、81b与支座5a、5b之一连接。摇杆80和推拉杆81a、81b构成杠杆传动机构,借助于该杠杆传动机构将直流马达或步进马达79的旋转运动转换成支座5a、5b的线性运动。在杠杆传动机构的铰接点82处可以使用扭转弹簧接头,以使直流马达或步进马达79的旋转运动尽可能无间隙地转换成线性运动。扭转弹簧接头可以在一个方向上预紧,并且因此可以实现很大程度上无间隙的运动转换。
71.除了至此描述的沿共用的引导轨迹的运动,还存在这两个光学元件横向于其共用的引导轨迹运动的可能性。例如在光学元件具有自由曲面的情况下,可以以这种方式扩大光学误差的校正范围,或可以补偿主导向件的引导误差。为此需要另外的驱动器或用于横向方向的导向件。
72.至此,仅描述了具有两个沿共用的引导轨迹受到引导的光学元件的光学组件的实施例。然而本发明还可以用于沿共用的引导轨迹引导多于两个光学元件。在图12中示意性地展示了具有三个沿共用的引导轨迹受到引导的光学元件的光学组件的实施例。具有另一个光学元件的第三支座5c位于具有光学元件的两个外部支座5a、5b之间。支座5a、5b、5c各自借助于例如呈滑动支承衬套形式的支承元件83a、83b、83c可移位地支承在导向杆11上。在支座5a、5b、5c的支承元件83a、83b、83c之间各自存在中断部85a、85b、385c,这些中断部可以实现使其他支座5a、5b、5c的支承元件83a、83b、83c在中断部85a、85b、85c内沿导向杆11移位。如本领域技术人员容易认识到:这个概念还可以转移到具有多于三个光学元件的光学组件。
73.在这一点上应指出,在本发明的实施变体中,在光学组件中有三个或更多个光学元件的情况下,尽管可以沿共用的引导轨迹引导所有光学元件或其支座,然而在本发明的范围内不一定必须是这种情况。然而在本发明的范围内,光学组件的光学元件中的至少两个光学元件或其支座具有共用的导向件。在多于两个光学元件时,也存在以下可能性:这些光学元件各自成对地具有共用的导向件。一对的引导运动的运动方向可以与另一对一致或与其成一定角度(例如90
°
)延伸。以这种方式,例如可以构建变焦系统,该变焦系统矫正不同的成像误差、被引入有不同的成像误差或者在该变焦系统中矫正与光学放大率或类似变量相关的成像误差。一个光学元件原则上也可以属于两对,例如一对的导向杆或导轨可以沿另一对的引导轨迹移位。
74.出于解说目的已经借助于示例性实施例详细描述了本发明。然而本领域技术人员会认识到在本发明的范围内可以与所描述的实施例不同。本发明因此不应由实施例限定,而是仅由所附权利要求书限定。
75.附图标记清单
[0076]1ꢀꢀꢀꢀꢀ
光学组件
[0077]3ꢀꢀꢀꢀꢀ
光学元件
[0078]5ꢀꢀꢀꢀꢀ
支座
[0079]7ꢀꢀꢀꢀꢀ
平面
[0080]9ꢀꢀꢀꢀꢀ
自由曲面
[0081]
11
ꢀꢀꢀꢀ
导向杆
[0082]
13
ꢀꢀꢀꢀ
导向杆
[0083]
15
ꢀꢀꢀꢀ
支承面
[0084]
17
ꢀꢀꢀꢀ
支承面
[0085]
19
ꢀꢀꢀꢀ
支承面
[0086]
21
ꢀꢀꢀꢀ
支承面
[0087]
23
ꢀꢀꢀꢀ
支承面
[0088]
25
ꢀꢀꢀꢀ
支承面
[0089]
27
ꢀꢀꢀꢀ
区段
[0090]
29
ꢀꢀꢀꢀ
区段
[0091]
31
ꢀꢀꢀꢀ
滑动支承衬套
[0092]
33
ꢀꢀꢀꢀ
凹部
[0093]
35
ꢀꢀꢀꢀ
导轨
[0094]
37
ꢀꢀꢀꢀ
导轨
[0095]
39
ꢀꢀꢀꢀ
v形槽
[0096]
41
ꢀꢀꢀꢀ
v形槽
[0097]
43
ꢀꢀꢀꢀ
屋顶边缘状的突起
[0098]
45
ꢀꢀꢀꢀ
屋顶边缘状的突起
[0099]
47
ꢀꢀꢀꢀ
中断部
[0100]
49
ꢀꢀꢀꢀ
中断部
[0101]
51
ꢀꢀꢀꢀ
保持架
[0102]
53
ꢀꢀꢀꢀ
滚针
[0103]
55
ꢀꢀꢀꢀ
载体元件
[0104]
57
ꢀꢀꢀꢀ
马达
[0105]
58
ꢀꢀꢀꢀ
电力线缆
[0106]
59
ꢀꢀꢀꢀ
主轴传动机构
[0107]
61
ꢀꢀꢀꢀ
马达
[0108]
62
ꢀꢀꢀꢀ
牵引机构
[0109]
63
ꢀꢀꢀꢀ
驱动轮
[0110]
65
ꢀꢀꢀꢀ
转向轮
[0111]
67
ꢀꢀꢀꢀ
接口
[0112]
69
ꢀꢀꢀꢀ
张紧轮
[0113]
71
ꢀꢀꢀꢀ
构件
[0114]
73
ꢀꢀꢀꢀ
支承元件
[0115]
75
ꢀꢀꢀꢀ
支承元件
[0116]
77
ꢀꢀꢀꢀ
保持架
[0117]
79
ꢀꢀꢀꢀ
马达
[0118]
80
ꢀꢀꢀꢀ
摇杆
[0119]
81
ꢀꢀꢀꢀ
推拉杆
[0120]
82
ꢀꢀꢀꢀ
铰接点
[0121]
83
ꢀꢀꢀꢀ
支承元件
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
