1.本实用新型涉及教学设备技术领域,具体的讲是一种教学用一体化光电巡线机器人小车。
背景技术:
2.随着科技的进步,机器人技术在人类生活和工业生产制造中发挥着越来越重要的作用。在教育领域,教学机器人可激发学生的学习兴趣、培养学生的综合能力,许多院校已在学生中开设了机器人学方面的课程;
3.目前高校机器人教学中,作为实验活动中使用的教具机器人,其控制电路是分列电子元件组成,机器人的整体结构比较粗糙也不够科学合理,电路的制作、调试过程比较麻烦,机器人的运行灵敏度及可靠性都比较差,性价比比较低,尤其是未能反映出光电一体化技术的广泛应用,智能化程度不高,使教材内容与飞速发展的光电及智能化技术应用相比而显得相对滞后,不利于培养学生的动手能力和素质教育的提高。
技术实现要素:
4.本实用新型要解决的技术问题是针对以上不足,提供一种教学用一体化光电巡线机器人小车,本实用新型结构简单,集成度高、车身长宽比例、重心分布合理,为机器人编程教学提供了一个理想的平台。
5.为解决以上技术问题,本实用新型采用以下技术方案:
6.一种教学用一体化光电巡线机器人小车,包括pcb板、驱动组件和巡线组件,所述pcb板上设置有单片机和两个升压调压芯片,所述驱动组件和巡线组件均设置于pcb板上,所述升压调压芯片、驱动组件和巡线组件均与单片机电连接;
7.所述驱动组件有两组,每组驱动组件均包括两个驱动组件,每组驱动组件中的两个驱动组件对称设置于pcb板左右两侧,每个驱动组件均包括马达、马达固定架、驱动轮和电机驱动芯片,马达固定架设置于pcb板的右端顶部,所述马达设置于马达固定架上,所述驱动轮设置于马达的输出端,所述电机驱动芯片设置于pcb板的底部位于马达固定架下方;
8.所述巡线组件包括七个,七个巡线组件均匀分布设置于pcb板的左端,每个所述巡线组件均包括光电颜色灰度检测传感器和两个发光二极管,所述光电颜色灰度检测传感器设置于pcb板的左端,两个发光二极管设置于光电颜色灰度检测传感器左右两侧。
9.本实用新型采用以上技术方案后,与现有技术相比,具有以下优点:
10.本实用新型采用fr4电路板工艺作为系统的电路承载同时也是机器人小车的结构体,直接将驱动组件和巡线组件集成于电路板上,与现有教学机器人小车相比,降低了电路、结构的复杂程度,省去了复杂的接线,减少接线或接插件造成的模拟信号采集带来的错误和误差;七组发光二极管形成光照补偿矩阵,使光电颜色灰度检测传感器能够更加准确的采集颜色,提高转换准确率,大大降低环境光照带来的干扰。
11.进一步的,还包括usb组件,所述usb组件包括连接小板、ch340g芯片和 usb接口,
所述连接小板设置于pcb板顶部,所述ch340g芯片和usb接口集成于连接小板上,所述ch340g芯片与单片机电连接。
12.采取上述进一步的有益效果为:采用ch340g usb转ttl芯片与单片机连接,方便使用者下载程序,且兼容keil、arduino、米思琪、s4a、scratch 等编程ide。
13.进一步的,所述pcb板的顶部设置有铜柱,所述连接小板设置于铜柱顶部。
14.采取上述进一步的有益效果为:通过铜柱固定连接小板,无需下载程序时可将usb组件取下,方便拆卸。
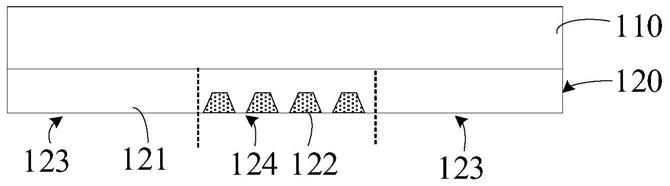
15.进一步的,所述pcb板上开设有条形通孔,所述条形通孔位于驱动组件和巡线组件之间。
16.进一步的,所述单片机的型号为atmega328p,所述升压调压芯片的型号为xl6019,所述电机驱动芯片的型号为drv8871。
17.下面结合附图和实施例对本实用新型进行详细说明。
附图说明
18.图1为本实用新型的主视图;
19.图2为本实用新型的立体结构示意图;
20.图3为本实用新型的立体结构示意图(去掉usb组件);
21.图4为本实用新型另一角度的立体结构示意图;
22.图5为本实用新型的电路原理图;
23.图6为本实用新型的电路原理图;
24.图7为本实用新型的电路原理图;
25.图8为本实用新型的电路原理图;
26.图9为本实用新型的电路原理图;
27.图10为本实用新型的电路原理图。
28.附图中,各标号所代表的部件列表如下:
29.1、pcb板;11、单片机;12、升压调压芯片;13、条形通孔;2、驱动组件;21、马达;22、马达固定架;23、驱动轮;24、电机驱动芯片;3、巡线组件;31、光电颜色灰度检测传感器;32、发光二极管;41、连接小板; 42、ch340g芯片;43、usb接口;44、铜柱。
具体实施方式
30.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
31.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”“顺时针”“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
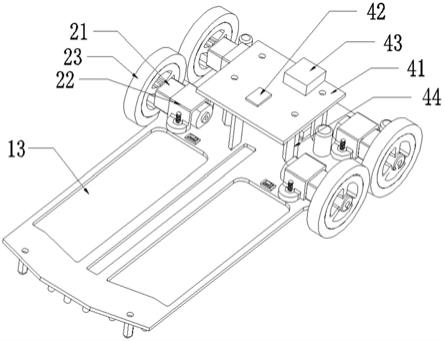
32.如图1、图2、图3和图4所示,一种教学用一体化光电巡线机器人小车,包括pcb板1、驱动组件2和巡线组件3,所述pcb板1上设置有单片机11和两个升压调压芯片12,所述驱动
组件2和巡线组件3均设置于pcb板1上,所述升压调压芯片12、驱动组件2和巡线组件3均与单片机11电连接;
33.所述驱动组件2有两组,每组驱动组件2均包括两个驱动组件2,每组驱动组件2中的两个驱动组件2对称设置于pcb板1左右两侧,每个驱动组件2均包括马达21、马达固定架22、驱动轮23和电机驱动芯片24,马达固定架22设置于pcb板1的右端顶部,所述马达21设置于马达固定架22上,所述驱动轮23 设置于马达21的输出端,所述电机驱动芯片24设置于pcb板1的底部位于马达固定架22下方;
34.所述巡线组件3包括七个,七个巡线组件3均匀分布设置于pcb板1的左端,每个所述巡线组件3均包括光电颜色灰度检测传感器31和两个发光二极管32,所述光电颜色灰度检测传感器31设置于pcb板1的左端,两个发光二极管设置于光电颜色灰度检测传感器31左右两侧。
35.如图2所示,作为一种实施方式,还包括usb组件,所述usb组件包括连接小板41、ch340g芯片42和usb接口43,所述连接小板41设置于pcb板1顶部,所述ch340g芯片42和usb接口43集成于连接小板41上,所述ch340g芯片42与单片机11电连接。
36.作为一种实施方式,所述pcb板1的顶部设置有铜柱44,所述连接小板41 设置于铜柱44顶部。
37.作为一种实施方式,所述pcb板1上开设有条形通孔13,所述条形通孔13 位于驱动组件2和巡线组件3之间。
38.作为一种实施方式,所述单片机11的型号为atmega328p,所述升压调压芯片12的型号为xl6019,所述电机驱动芯片24的型号为drv8871,马达21的型号为jga12
‑
n30
‑
20k(根据情况还可选用jga12
‑
n30、jga12
‑
n20);
39.所述光电颜色灰度检测传感器31的型号为pt5325c
‑
m
‑
5;
40.作为一种实施方式,所述pcb1上设置有isp下载接口、电源接口和运行开关,isp下载接口和运行开关与单片机11电连接;
41.如图5、图6、图7、图8、图9和图10所示,为本实用新型的电路原理结构示意图,本实用新型采用atmega328p单片机为主芯片,atmega328p单片机的内部a/d转换采样速率高,转换准确,为巡航小车完成告诉巡线提供保障;
42.共七路光电颜色灰度检测传感器,七组发光二极管形成光照补偿矩阵,使光电颜色灰度检测传感器能够更加准确的采集颜色,提高转换准确率,大大降低环境光照带来的干扰;
43.四个jga12
‑
n30
‑
20k可让小车具有更大的行走力和制动效果,四路 drv8871全桥直流电机驱动,为电机提供了电力保障,以及两路xl6019电源升压调压电路,xl6019可以在使用芯片锂电池组的情况下降电机供电电压在 7.8v~36v之间调节。
44.以上所述为本实用新型最佳实施方式的举例,其中未详细述及的部分均为本领域普通技术人员的公知常识。本实用新型的保护范围以权利要求的内容为准,任何基于本实用新型的技术启示而进行的等效变换,也在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。