1.本发明涉及一种架子鼓吊镲,特别是涉及一种多功能可调节式的架子鼓机器人吊镲,本发明还涉及一种架子鼓吊镲调节方法,特别涉及一种多功能可调节式的架子鼓机器人吊镲调节方法,属于架子鼓吊镲技术领域。
背景技术:
2.架子鼓即爵士鼓,是爵士乐队中十分重要的一种打击乐器,它通常由一个脚踏的低音大鼓、一个军鼓、二个或以上嗵嗵鼓、一个或两个吊镲、一个节奏镲和一个带踏板的踩镲等部分组成,当然有时因演奏需要会增设一些如牛铃、木鱼、沙槌、三角铁、音树,不管增设多少器件,都是由一人演奏,鼓手用鼓槌击打各部件使其发声。爵士乐中常用的鼓槌有木制的鼓棒,由钢丝制成的鼓刷,由一捆细木条捆成的束棒等。
3.架子鼓形成于20世纪40年代,它包含着各种不同类型、不同音色的手击乐器和脚击乐器,手击乐器有小鼓、嗵鼓、吊镲等,脚击乐器有大鼓、踩镲。在此基础上,根据演奏的需要、可随时增减附加打击乐器,在乐队中鼓手掌握着乐曲的速度和节奏等重要环节,尤其是在爵士乐中,鼓手特别需要与其他乐手保持默契的合作状态,
4.通常来说,架子鼓常与其他乐器共同演奏,但架子鼓亦可以独奏。现有技术中的架子鼓其低音大鼓、一个军鼓、二个或以上嗵嗵鼓往往都是分散开采用不同架子支撑的,以及两个吊镲也是如此这样就会出现第一容易丢失的问题,第二在存放的时候也容易混乱摆放导致使用的时候找寻麻烦,而且收纳也不好收纳,其次当不同学员练习的时候往往有自己喜欢的架子鼓,随意摆放组合很容易丢失,为此设计一种多功能可调节式的架子鼓机器人吊镲及其调节方法来优化上述问题。
技术实现要素:
5.本发明的主要目的是为了提供一种多功能可调节式的架子鼓机器人吊镲及其调节方法,通过拉动第二滑动插板和第一滑动插板将第二侧固定板和第一侧固定板拉向远离底座的方向,通过转动第一铰接杆和第二铰接杆分别使其第一竖杆和第二竖杆在第一弧形限位槽和第二弧形限位槽内侧滑动至第一铰接杆和第二铰接杆分别与第一侧固定板和第二侧固定板垂直,通过转动转筒使其第一嗵嗵鼓和第二侧嗵嗵鼓旋转至于水平面趋向平行的位置处并通过固定螺杆进行固定,通过启动电动升降杆带动横杆和顶杆向上运动进而带动内升降杆向上运动,使其带动弧形齿条与圆形齿轮接触相互啮合,通过启动旋转电机带动转轴转动,通过转轴带动主传动盘转动,通过主传动盘带动传动皮带运动,通过传动皮带带动从传动盘转动进而带动低音大鼓转动,通过低音大鼓转动使其带动转杆以及军鼓运动,并通过圆形齿轮与弧形齿条的相互配合实现调节军鼓旋转至水平位置,通过展开坐板并通过限位块限位可以进行乘坐,在需要收纳的时候通过进行相反的操作可以进行收纳折叠。
6.本发明的目的可以通过采用如下技术方案达到:
7.一种多功能可调节式的架子鼓机器人吊镲,包括箱体,所述箱体的内底部安装有底座,所述底座顶部的一侧安装有电动升降组件,所述箱体的顶部安装有中空外管,所述底座的顶中部安装有旋转驱动组件,所述中空外管的外侧和旋转驱动组件上安装有传动盘组件,所述中空外管的内部设有可被所述电动升降组件驱动升降的内升降杆,所述传动盘组件的顶中部安装有低音大鼓,所述低音大鼓的两侧通过转杆安装有军鼓,所述内升降杆和转杆之间设有齿盘调节组件,所述底座的两侧开设有方形滑槽,所述底座一侧的方形滑槽内插入有第一l型侧固定板组件,所述底座的另一侧的方形滑槽内插入有第二l型侧固定板组件,所述第一l型侧固定板组件上铰接有可在第一l型侧固定板组件上转动的第一竖杆组件,所述第一竖杆组件的外侧通过第一连接臂安装有第一嗵嗵鼓,所述第二l型侧固定板组件上铰接有可在第二l型侧固定板组件上转动的第二竖杆组件,且所述第二竖杆组件通过第二连接臂安装有第二侧嗵嗵鼓,所述箱体的正面设有乘坐板组件。
8.优选的,所述电动升降组件包括电动升降杆、横杆、通口和顶杆,所述电动升降杆安装在所述底座顶部的一侧上,且所述电动升降杆输出端的中部安装有横杆,所述横杆远离所述电动升降杆的一端顶部安装有顶杆,所述顶杆的顶部和电动升降杆的输出端贯穿所述中空外管与所述内升降杆内底部固定,所述通口开设在所述横杆顶中部处,且被所述旋转驱动组件贯穿。
9.优选的,所述旋转驱动组件包括旋转电机和转轴,所述旋转电机安装在所述底座顶中部处,且所述旋转电机的输出端安装有贯穿所述通口的转轴,所述转轴的顶部安装有传动盘组件。
10.优选的,所述传动盘组件包括从传动盘、主传动盘、传动皮带和支撑杆,所述转轴的顶部安装有主传动盘,所述中空外管外侧的中部安装有从传动盘,所述主传动盘的顶中部安装有低音大鼓,所述主传动盘和从传动盘的外侧套设有传动皮带。
11.优选的,所述齿盘调节组件包括弧形齿条和圆形齿轮,所述转杆外侧的中部安装有圆形齿轮,所述内升降杆的顶部安装有弧形齿条,所述圆形齿轮与所述弧形齿条相互啮合。
12.优选的,所述第一l型侧固定板组件包括第一滑动插板、第一侧固定板和第一弧形限位槽,所述第一滑动插板顶部的一侧安装有第一侧固定板,所述第一滑动插板的顶部开设有第一弧形限位槽,所述第一竖杆组件插入至第一弧形限位槽的内侧且与所述第一侧固定板内侧铰接;
13.所述第一竖杆组件包括第一吊镲、第一竖杆、第一铰接杆和第一调节杆,所述第一竖杆插入至所述第一弧形限位槽的内侧,所述第一竖杆外侧的顶部铰接有第一铰接杆,且所述第一铰接杆的另一端铰接在所述第一侧固定板内侧的顶部处,所述第一竖杆的顶部铰接有第一调节杆,所述第一竖杆外侧的中部铰接有第一连接臂,所述第一竖杆外侧的上方安装有第一吊镲。
14.优选的,所述第二l型侧固定板组件包括第二滑动插板、第二侧固定板和第二弧形限位槽,所述第二滑动插板顶部的一侧安装有第二侧固定板,所述第二滑动插板的顶部开设有第二弧形限位槽,所述第二竖杆组件插入至所述第二弧形限位槽的内侧且所述第一竖杆组件与所述第二侧固定板内壁上方铰接;
15.所述第一竖杆组件包括第二竖杆、第二吊镲、第二铰接杆和第二调节杆,所述第二
竖杆部分插入至所述第二弧形限位槽的内侧,且所述第二竖杆外侧的中部铰接有第二连接臂,所述第二竖杆外侧的顶部铰接有第二铰接杆,且所述第二铰接杆的另一端铰接在所述第二侧固定板的内壁上,所述第二竖杆外侧上方安装有第二吊镲,所述第二竖杆的顶部铰接有第二调节杆。
16.优选的,所述第一连接臂和第二连接臂皆包括转筒和固定螺杆,所述第一连接臂还包括第一连接臂,所述第二连接臂还包括第二连接臂,所述第一竖杆外侧的下方铰接有第一连接臂,所述第一连接臂的外侧端部套设有转筒,且所述转筒的外侧啮合有固定螺杆,所述第二竖杆的外侧铰接有第二连接臂,且所述第二连接臂外侧的端部设有转筒,所述转筒的外侧啮合有固定螺杆。
17.优选的,所述乘坐板组件包括坐板、限位块、铰接座和方形收纳槽,所述方形收纳槽开设在所述箱体正面的中部处,且所述方形收纳槽的内底部安装有限位块,所述限位块的顶部安装有坐板,所述箱体正面且位于所述方形收纳槽下方处安装有限位块,所述坐板的内侧铺设有缓冲垫。
18.一种多功能可调节式的架子鼓机器人吊镲调节方法,包括如下步骤:
19.步骤1:通过拉动第二滑动插板和第一滑动插板将第二侧固定板和第一侧固定板拉向远离底座的方向;
20.步骤2:通过转动第一铰接杆和第二铰接杆分别使其第一竖杆和第二竖杆在第一弧形限位槽和第二弧形限位槽内侧滑动至第一铰接杆和第二铰接杆分别与第一侧固定板和第二侧固定板垂直;
21.步骤3:通过转动转筒使其第一嗵嗵鼓和第二侧嗵嗵鼓旋转至于水平面趋向平行的位置处并通过固定螺杆进行固定;
22.步骤4:通过启动电动升降杆带动横杆和顶杆向上运动进而带动内升降杆向上运动,使其带动弧形齿条与圆形齿轮接触相互啮合;
23.步骤5:通过启动旋转电机带动转轴转动,通过转轴带动主传动盘转动,通过主传动盘带动传动皮带运动,通过传动皮带带动从传动盘转动进而带动低音大鼓转动;
24.步骤6:通过低音大鼓转动使其带动转杆以及军鼓运动,并通过圆形齿轮与弧形齿条的相互配合实现调节军鼓旋转至水平位置;
25.步骤7:通过展开坐板并通过限位块限位可以进行乘坐;
26.步骤8:在需要收纳的时候通过进行相反的操作可以进行收纳折叠。
27.本发明的有益技术效果:
28.本发明提供的一种多功能可调节式的架子鼓机器人吊镲及其调节方法,通过拉动第二滑动插板和第一滑动插板将第二侧固定板和第一侧固定板拉向远离底座的方向,通过转动第一铰接杆和第二铰接杆分别使其第一竖杆和第二竖杆在第一弧形限位槽和第二弧形限位槽内侧滑动至第一铰接杆和第二铰接杆分别与第一侧固定板和第二侧固定板垂直,通过转动转筒使其第一嗵嗵鼓和第二侧嗵嗵鼓旋转至于水平面趋向平行的位置处并通过固定螺杆进行固定,通过启动电动升降杆带动横杆和顶杆向上运动进而带动内升降杆向上运动,使其带动弧形齿条与圆形齿轮接触相互啮合,通过启动旋转电机带动转轴转动,通过转轴带动主传动盘转动,通过主传动盘带动传动皮带运动,通过传动皮带带动从传动盘转动进而带动低音大鼓转动,通过低音大鼓转动使其带动转杆以及军鼓运动,并通过圆形齿
轮与弧形齿条的相互配合实现调节军鼓旋转至水平位置,通过展开坐板并通过限位块限位可以进行乘坐,在需要收纳的时候通过进行相反的操作可以进行收纳折叠。
附图说明
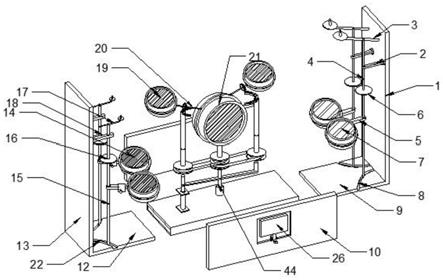
29.图1为按照本发明的一种多功能可调节式的架子鼓机器人吊镲及其调节方法的一优选实施例的装置整体立体结构分解图;
30.图2为按照本发明的一种多功能可调节式的架子鼓机器人吊镲及其调节方法的一优选实施例的第一l型架组件立体结构示意图;
31.图3为按照本发明的一种多功能可调节式的架子鼓机器人吊镲及其调节方法的一优选实施例的第二l型架组件立体结构示意图;
32.图4为按照本发明的一种多功能可调节式的架子鼓机器人吊镲及其调节方法的一优选实施例的a处结构放大图;
33.图5为按照本发明的一种多功能可调节式的架子鼓机器人吊镲及其调节方法的一优选实施例的箱体正面立体结构示意图;
34.图6为按照本发明的一种多功能可调节式的架子鼓机器人吊镲及其调节方法的一优选实施例的升降组件以及传动组件和鼓体组合立体结构示意图;
35.图7为按照本发明的一种多功能可调节式的架子鼓机器人吊镲及其调节方法的一优选实施例的b处结构放大图;
36.图8为按照本发明的一种多功能可调节式的架子鼓机器人吊镲及其调节方法的一优选实施例的传动组件以及调节组件组合立体结构示意图;
37.图9为按照本发明的一种多功能可调节式的架子鼓机器人吊镲及其调节方法的一优选实施例的升降组件立体结构示意图;
38.图10为按照本发明的一种多功能可调节式的架子鼓机器人吊镲及其调节方法的一优选实施例的装置整体立体结构示意图。
39.图中:1
‑
第一侧固定板,2
‑
第一铰接杆,3
‑
第一调节杆,4
‑
第一竖杆,5
‑
第一连接臂,6
‑
第一吊镲,7
‑
第一嗵嗵鼓,8
‑
第一弧形限位槽,9
‑
第一滑动插板,10
‑
箱体,11
‑
方形收纳槽,12
‑
第二滑动插板,13
‑
第二侧固定板,14
‑
第二嗵嗵鼓,15
‑
第二竖杆,16
‑
第二吊镲,17
‑
第二调节杆,18
‑
第二铰接杆,19
‑
军鼓,20
‑
转杆,21
‑
低音大鼓,22
‑
第二弧形限位槽,23
‑
转筒,24
‑
第二连接臂,25
‑
固定螺杆,26
‑
坐板,27
‑
铰接座,28
‑
限位块,29
‑
内升降杆,30
‑
中空外管,31
‑
从传动盘,32
‑
主传动盘,33
‑
传动皮带,34
‑
横杆,35
‑
底座,36
‑
电动升降杆,37
‑
旋转电机,38
‑
顶杆,39
‑
圆形齿轮,40
‑
弧形齿条,41
‑
支撑杆,42
‑
通口,43
‑
方形滑槽,44
‑
转轴。
具体实施方式
40.为使本领域技术人员更加清楚和明确本发明的技术方案,下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
41.如图1
‑
图10所示,本实施例提供的一种多功能可调节式的架子鼓机器人吊镲,包括箱体10,箱体10的内底部安装有底座35,底座35顶部的一侧安装有电动升降组件,箱体10的顶部安装有中空外管30,底座35的顶中部安装有旋转驱动组件,中空外管30的外侧和旋
转驱动组件上安装有传动盘组件,中空外管30的内部设有可被电动升降组件驱动升降的内升降杆29,传动盘组件的顶中部安装有低音大鼓21,低音大鼓21的两侧通过转杆20安装有军鼓19,内升降杆29和转杆20之间设有齿盘调节组件,底座35的两侧开设有方形滑槽43,底座35一侧的方形滑槽43内插入有第一l型侧固定板组件,底座35的另一侧的方形滑槽43内插入有第二l型侧固定板组件,第一l型侧固定板组件上铰接有可在第一l型侧固定板组件上转动的第一竖杆组件,第一竖杆组件的外侧通过第一连接臂安装有第一嗵嗵鼓7,第二l型侧固定板组件上铰接有可在第二l型侧固定板组件上转动的第二竖杆组件,且第二竖杆组件通过第二连接臂安装有第二侧嗵嗵鼓14,箱体10的正面设有乘坐板组件。
42.通过拉动第二滑动插板12和第一滑动插板9将第二侧固定板13和第一侧固定板1拉向远离底座35的方向,通过转动第一铰接杆2和第二铰接杆18分别使其第一竖杆4和第二竖杆15在第一弧形限位槽8和第二弧形限位槽22内侧滑动至第一铰接杆2和第二铰接杆18分别与第一侧固定板1和第二侧固定板13垂直,通过转动转筒23使其第一嗵嗵鼓7和第二侧嗵嗵鼓14旋转至于水平面趋向平行的位置处并通过固定螺杆25进行固定,通过启动电动升降杆36带动横杆34和顶杆38向上运动进而带动内升降杆29向上运动,使其带动弧形齿条40与圆形齿轮39接触相互啮合,通过启动旋转电机37带动转轴44转动,通过转轴44带动主传动盘32转动,通过主传动盘32带动传动皮带33运动,通过传动皮带33带动从传动盘31转动进而带动低音大鼓21转动,通过低音大鼓21转动使其带动转杆20以及军鼓19运动,并通过圆形齿轮39与弧形齿条40的相互配合实现调节军鼓19旋转至水平位置,通过展开坐板26并通过限位块28限位可以进行乘坐,在需要收纳的时候通过进行相反的操作可以进行收纳折叠。
43.在本实施例中,电动升降组件包括电动升降杆36、横杆34、通口42和顶杆38,电动升降杆36安装在底座35顶部的一侧上,且电动升降杆36输出端的中部安装有横杆34,横杆34远离电动升降杆36的一端顶部安装有顶杆38,顶杆38的顶部和电动升降杆36的输出端贯穿中空外管30与内升降杆29内底部固定,通口42开设在横杆34顶中部处,且被旋转驱动组件贯穿。
44.在本实施例中,旋转驱动组件包括旋转电机37和转轴44,旋转电机37安装在底座35顶中部处,且旋转电机37的输出端安装有贯穿通口42的转轴44,转轴44的顶部安装有传动盘组件。
45.在本实施例中,传动盘组件包括从传动盘31、主传动盘32、传动皮带33和支撑杆41,转轴44的顶部安装有主传动盘32,中空外管30外侧的中部安装有从传动盘31,主传动盘32的顶中部安装有低音大鼓21,主传动盘32和从传动盘31的外侧套设有传动皮带33。
46.在本实施例中,齿盘调节组件包括弧形齿条40和圆形齿轮39,转杆20外侧的中部安装有圆形齿轮39,内升降杆29的顶部安装有弧形齿条40,圆形齿轮39与弧形齿条40相互啮合。
47.在本实施例中,第一l型侧固定板组件包括第一滑动插板9、第一侧固定板1和第一弧形限位槽8,第一滑动插板9顶部的一侧安装有第一侧固定板1,第一滑动插板9的顶部开设有第一弧形限位槽8,第一竖杆组件插入至第一弧形限位槽8的内侧且与第一侧固定板1内侧铰接;
48.第一竖杆组件包括第一吊镲6、第一竖杆4、第一铰接杆2和第一调节杆3,第一竖杆
4插入至第一弧形限位槽8的内侧,第一竖杆4外侧的顶部铰接有第一铰接杆2,且第一铰接杆2的另一端铰接在第一侧固定板1内侧的顶部处,第一竖杆4的顶部铰接有第一调节杆3,第一竖杆4外侧的中部铰接有第一连接臂,第一竖杆4外侧的上方安装有第一吊镲6。
49.在本实施例中,第二l型侧固定板组件包括第二滑动插板12、第二侧固定板13和第二弧形限位槽22,第二滑动插板12顶部的一侧安装有第二侧固定板13,第二滑动插板12的顶部开设有第二弧形限位槽22,第二竖杆组件插入至第二弧形限位槽22的内侧且第一竖杆组件与第二侧固定板13内壁上方铰接;
50.第一竖杆组件包括第二竖杆15、第二吊镲16、第二铰接杆18和第二调节杆17,第二竖杆15部分插入至第二弧形限位槽22的内侧,且第二竖杆15外侧的中部铰接有第二连接臂,第二竖杆15外侧的顶部铰接有第二铰接杆18,且第二铰接杆18的另一端铰接在第二侧固定板13的内壁上,第二竖杆15外侧上方安装有第二吊镲16,第二竖杆15的顶部铰接有第二调节杆17。
51.在本实施例中,第一连接臂和第二连接臂皆包括转筒23和固定螺杆25,第一连接臂还包括第一连接臂5,第二连接臂还包括第二连接臂24,第一竖杆4外侧的下方铰接有第一连接臂5,第一连接臂5的外侧端部套设有转筒23,且转筒23的外侧啮合有固定螺杆25,第二竖杆15的外侧铰接有第二连接臂24,且第二连接臂24外侧的端部设有转筒23,转筒23的外侧啮合有固定螺杆25。
52.在本实施例中,乘坐板组件包括坐板26、限位块28、铰接座27和方形收纳槽11,方形收纳槽11开设在箱体10正面的中部处,且方形收纳槽11的内底部安装有限位块28,限位块28的顶部安装有坐板26,箱体10正面且位于方形收纳槽11下方处安装有限位块28,坐板26的内侧铺设有缓冲垫。
53.一种多功能可调节式的架子鼓机器人吊镲调节方法,包括如下步骤:
54.步骤1:通过拉动第二滑动插板12和第一滑动插板9将第二侧固定板13和第一侧固定板1拉向远离底座35的方向;
55.步骤2:通过转动第一铰接杆2和第二铰接杆18分别使其第一竖杆4和第二竖杆15在第一弧形限位槽8和第二弧形限位槽22内侧滑动至第一铰接杆2和第二铰接杆18分别与第一侧固定板1和第二侧固定板13垂直;
56.步骤3:通过转动转筒23使其第一嗵嗵鼓7和第二侧嗵嗵鼓14旋转至于水平面趋向平行的位置处并通过固定螺杆25进行固定;
57.步骤4:通过启动电动升降杆36带动横杆34和顶杆38向上运动进而带动内升降杆29向上运动,使其带动弧形齿条40与圆形齿轮39接触相互啮合;
58.步骤5:通过启动旋转电机37带动转轴44转动,通过转轴44带动主传动盘32转动,通过主传动盘32带动传动皮带33运动,通过传动皮带33带动从传动盘31转动进而带动低音大鼓21转动;
59.步骤6:通过低音大鼓21转动使其带动转杆20以及军鼓19运动,并通过圆形齿轮39与弧形齿条40的相互配合实现调节军鼓19旋转至水平位置;
60.步骤7:通过展开坐板26并通过限位块28限位可以进行乘坐;
61.步骤8:在需要收纳的时候通过进行相反的操作可以进行收纳折叠。
62.以上,仅为本发明进一步的实施例,但本发明的保护范围并不局限于此,任何熟悉
本技术领域的技术人员在本发明所公开的范围内,根据本发明的技术方案及其构思加以等同替换或改变,都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

