本实用新型涉及设备领域,特别是涉及一种纸质包装盒用围条的成型器。
背景技术:
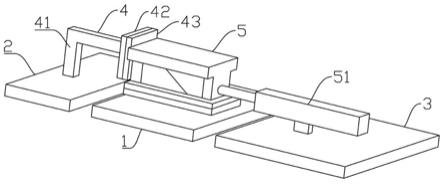
一些产品的外包装应用到纸质的包装盒,如白酒外包装盒,如图1所示,通常纸质包装盒包括盒体1和盒盖3,盒体1和盒盖3通过一个三折的长方条进行胶粘连接,长方条叫做围条2,围条2弯折后包括左、中、右三段,围条2和盒盖3在生产时就设置有折线,以便按照预定尺寸进行弯折,盒盖3弯折部分尺寸与围条2三折的中段尺寸匹配,先将盒盖3弯折部分粘结在围条2中段,围条2位于盒盖3弯折内侧,再将围条2设置盒盖3的一侧整体粘结在盒体1端部相邻的三个内侧面上,即将盒盖3粘结于盒体1端部了。
现有纸质包装盒的围条2需要人工弯折并打胶,手工打胶不均匀,手工弯折的围条2组装在盒体1的位置也不统一,一方面劳动强度大、工作效率低、人工成本高,另一方面组装的纸质包装盒位置不统一影响客户后续对包装盒内包物的安装设置,影响客户流水作业生产,成为瑕疵品甚至废品,抬高生产成本。
技术实现要素:
本实用新型的目的在于:针对现有技术存在的现有纸质包装盒生产过程中,围条成型需要人工弯折,手工弯折的围条组装在盒体的位置不统一,一方面劳动强度大、工作效率低、人工成本高,另一方面组装的纸质包装盒位置不统一影响客户后续对包装盒内包物的安装设置,影响客户流水作业生产,成为瑕疵品甚至废品,抬高生产成本的问题,提供一种纸质包装盒用围条的成型器。
为了实现上述目的,本实用新型采用的技术方案为:
一种纸质包装盒用围条的成型器,包括第一基座,所述第一基座上竖向设有第一滑轨,所述第一滑轨上滑动配合有第一滑块,所述第一滑块上设有两个转辊,两个所述转辊能够配合于围条中段两侧,所述转辊用于将围条两侧段下压。
采用本实用新型所述的一种纸质包装盒用围条的成型器,使用时将围条中段贴合到成型头上,围条的左右两段均悬空设置,利用所述第一滑块带动两个所述转辊将围条两侧段向下弯折90度,使得弯折后的围条完全贴合于所述成型头表面,每个弯折的围条形状一致,使得其组装在盒体内位置能够统一,节约人工1人,能够采用自动流水线作业,提高了工作效率,生产的纸质包装盒用围条产品优良,良品率高,降低了生产成本。
优选地,所述第一基座包括两个,所述第一滑块的两端分别滑动连接一个所述第一基座。
优选地,围条中段用于设于成型头上,两个所述转辊能够配合于所述成型头两侧。
进一步优选地,所述第一基座连接于第二滑块上,所述第二滑块滑动配合于第二滑轨上,所述第二滑轨和所述第二滑块的配合使所述成型器靠近或者远离所述成型头。
综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
本实用新型所述的一种纸质包装盒用围条的成型器,使用时将围条中段贴合到成型头上,围条的左右两段均悬空设置,利用所述第一滑块带动两个所述转辊将围条两侧段向下弯折90度,使得弯折后的围条完全贴合于所述成型头表面,每个弯折的围条形状一致,使得其组装在盒体内位置能够统一,节约人工1人,能够采用自动流水线作业,提高了工作效率,生产的纸质包装盒用围条产品优良,良品率高,降低了生产成本。
附图说明
图1是纸质包装盒结构的爆炸示意图;
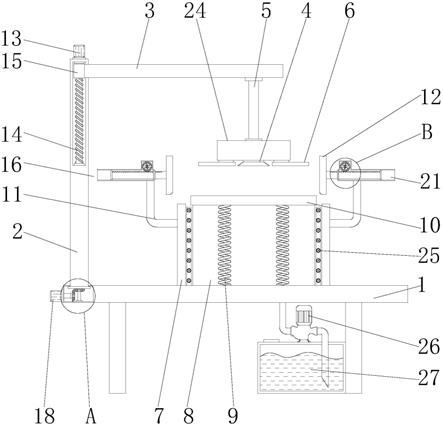
图2是实施例中全自动纸质包装盒成型设备的结构示意图一;
图3是实施例中全自动纸质包装盒成型设备的结构示意图二;
图4是实施例中全自动纸质包装盒成型设备的结构示意图三;
图5是实施例中围条放置部件的结构示意图;
图6是图5中围条放置部件安装设置围条的示意图;
图7是推料板推动围条进入围条对位区域的立体示意图;
图8是第一转运部件将围条从围条对位区域取走的立体示意图;
图9是推料板、围条和围条对位区域相对位置示意图;
图10是推料板推动围条进入围条对位区域的平面示意图;
图11是第一转运部件将围条从围条对位区域取走的平面示意图;
图12是第一转运部件将围条对位成型头的示意图;
图13是第一转运部件将围条放入成型头的示意图;
图14是成型器匹配围条和成型头的示意图;
图15是转辊开始下压围条的示意图;
图16是转辊结束下压围条的示意图;
图17是围条在成型头上成型的示意图;
图18是第一打胶机在围条上打胶位置的示意图;
图19是第二转运部件从盒盖传输部件上将盒盖取走的示意图一;
图20是第二转运部件从盒盖传输部件上将盒盖取走的示意图二;
图21是第二转运部件将盒盖与围条对位的示意图;
图22是盒盖与围条粘结的示意图;
图23是盒盖与围条粘结成型的示意图;
图24是盒体传输部件的结构示意图;
图25是第三转运部件将盒体放入盒体对位区域的示意图;
图26是第一压板将盒盖固定的示意图;
图27是盒体靠近成型头的示意图;
图28是围条和对应的部分盒盖嵌入盒体端口的示意图;
图29是第二压板靠近盒体的示意图;
图30是第二压板将盒体和成型头压紧的示意图;
图31是第一压板松开的示意图;
图32是第二压板松开的示意图。
图中标记:1-盒体,11-盒体对位区域,12-盒体打胶区域,2-围条,21-围条对位区域,22-围条打胶区域,3-盒盖,101-第二基座,102-安装座,103-安装槽,104-斜槽,105-推料口,106-推料板,107-放料槽,108-第一转运部件,200-转盘,201-第三基座,202-成型头,203-吸口,301-第一基座,302-第一滑轨,303-第一滑块,304-转辊,401-第一打胶机,501-第一传送带,502-边挡,503-第一端挡,504-第二转运部件,505-压块,601-第二传送带,602-第二端挡,603-第一档板,604-第二档板,605-第三转运部件,606-第一压板,607-第二压板,701-周转平台,702-机器人抓手,703-第三传送带。
具体实施方式
下面结合附图,对本实用新型作详细的说明。
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
实施例1
如图2至图32所示,一种全自动纸质包装盒成型设备,包括第一成型机构、第一打胶机401、第二成型机构、第二打胶机、第三成型机构、转盘200和控制机构。
如图2至图4所示,沿所述转盘200周缘均匀连接有四个成型头202,沿所述转盘200周缘逆时针方向依次设置所述第一成型机构、所述第一打胶机401、所述第二成型机构和所述第三成型机构,并分别与一个所述成型头202对应。
如图2至图17所示,所述第一成型机构包括所述成型头202、成型器、围条2放置部件和第一转运部件108,所述第一成型机构用于将长方条的围条2折叠成三段,并使围条2贴合于所述成型头202表面。
具体地,所述围条2放置部件用于设置若干张围条2,如图5至图11所示,所述围条2放置部件包括第二基座101,所述第二基座101上相对设有两个安装座102,两个所述安装座102相对一侧分别设有安装槽103,所述安装槽103竖向设置,所述安装槽103的宽度适配围条2的宽度,两个所述安装槽103分别用于放置围条2的端部,所述安装槽103顶端为斜槽104,所述斜槽104用于放置围条2时导向;所述安装座102底部设有推料口105,所述推料口105适配有推料板106,所述推料板106用于进入一侧的所述推料口105,将一张围条2由另一侧的所述推料口105推离所述安装槽103进入围条对位区域21,所述围条对位区域21和所述推料板106相对设于所述安装座102两侧,所述推料板106用于进入一侧的所述推料口105,将一张围条2由另一侧的所述推料口105推离所述安装槽103进入围条对位区域21,所述围条对位区域21和所述推料板106相对设于所述安装座102两侧;所述推料板106上设有放料槽107,所述放料槽107用于放置一张围条2在所述推料板106上,能够使得所述推料板106的厚度等于所述推料口105的厚度,即所述推料板106能够填满所述推料口105,而一张围条2落入所述放料槽107,并被所述推料板106推出到所述围条对位区域21,其余的围条2并不能在此时通过所述推料口105,避免所述推料口105卡住,所述放料槽107位于所述推料板106端部。
具体地,所述第一转运部件108用于依次将一张围条2转运到所述成型头202上,如图2至图4、图8和图12所示,所述第一转运部件108包括第一吸头、第一横移组件和第一竖移组件,所述第一吸头能够产生吸力,所述第一吸头用于吸附围条2中段,所述第一吸头连接于所述第一竖移组件,所述第一竖移组件滑动连接于所述第一横移组件,所述第一横移组件带动所述第一竖移组件在所述围条对位区域21和与其对位的所述成型头202之间移动,所述第一竖移组件带动所述第一吸头上下升降移动,使所述第一吸头在所述围条对位区域21处能够吸合围条2,并将围条2放置于所述成型头202上;所述第一横移组件带动所述第一吸头移动是通过行程开关的方式或者程序控制路径的方式实现,使得所述第一吸头能够分别与所述围条对位区域21和所述成型头202对齐,所述第一竖移组件带动所述第一吸头升降是通过行程开关的方式或者程序控制路径的方式实现,使得所述第一吸头能够吸放所述围条对位区域21处或所述成型头202处的围条2。
具体地,如图12至图18所示,所述成型头202连接于第三基座201端部,所述第三基座201连接于所述转盘200,所述成型头202包括三个成型面,三个所述成型面依次连接并呈门型设置,每个所述成型面上设有至少一个吸口203,所述吸口203能够产生吸力,所述吸口203用于将围条2的三段吸附贴合于对应的所述成型面上,本实施例中每个所述成型面上间隔设有两个吸口203。
具体地,所述成型器用于配合所述成型头202,如图13至图17所示,所述成型器包括两个第一基座301,所述第一基座301上竖向设有第一滑轨302,所述第一滑轨302上滑动配合有第一滑块303,所述第一滑块303的两端分别滑动连接一个所述第一基座301,所述第一滑块303上设有两个转辊304,两个所述转辊304能够配合于所述成型头202两侧,所述转辊304用于将围条2两侧段下压,所述转辊304相对围条2表面为转动滚压,避免滑块滑压的方式破坏围条2表面。
具体地,所述第一成型机构还包括第二滑轨和与其滑动配合的第二滑块,所述第二滑块连接所述第一基座301,所述第二滑轨和所述第二滑块的配合使所述成型器靠近或者远离所述成型头202。
如图2至图4所示,所述第一打胶机401用于对位于所述成型头202表面的围条2中段外侧的围条打胶区域22进行打胶。
如图2至图4、图19至图23所示,所述第二成型机构包括盒盖3传输部件和第二转运部件504,所述第二成型机构用于将盒盖3设置到所述成型头202上,使盒盖3尾段与围条2中段对齐,并通过所述围条打胶区域22的胶水进行粘结,粘结后,盒盖3、围条2和所述成型头202的外围尺寸适配盒体1端部内围尺寸。
具体地,所述第二转运部件504用于依次将一张盒盖3转运到所述成型头202处,将盒盖3粘结在围条2上,如图2至图4、图19至图22所示,所述第二转运部件504包括压块505、第二吸头、第二横移组件和第二竖移组件;所述压块505用于匹配盒盖3尾段,所述第二转运部件504放置盒盖3时所述压块505将盒盖3尾段压于围条2的胶水上,巧妙的通过所述第二转运部件504放置盒盖3的同时,使用所述压块505将盒盖3尾段压于围条2的胶水上,使盒盖3和围条2稳定粘结;所述第二吸头能够产生吸力,所述第二吸头用于吸附盒盖3;所述第二吸头连接于第二竖移组件,所述第二竖移组件滑动连接于所述第二横移组件,所述第二横移组件带动所述第二竖移组件在所述盒盖3传输部件和所述成型头202之间移动,所述第二竖移组件带动所述第二吸头上下升降移动,使所述第二吸头在所述盒盖3传输部件处能够吸合盒盖3,并将盒盖3放置于所述成型头202上;所述第二横移组件带动所述第二吸头移动是通过行程开关的方式或者程序控制路径的方式实现,使得所述第二吸头能够分别与所述盒盖3传输部件和所述成型头202对齐,所述第二竖移组件带动所述第二吸头升降是通过行程开关的方式或者程序控制路径的方式实现,使得所述第二吸头能够吸放所述盒盖3传输部件处或所述成型头202处的盒盖3。
具体地,所述盒盖3传输部件用于依次传输若干张盒盖3,如图19至图22所示,所述盒盖3传输部件包括第一传送带501、第一端挡503和边挡502,所述第一传送带501用于传输盒盖3,所述第一端挡503设于所述第一传送带501末端,所述第一端挡503用于盒盖3的定位,所述边挡502用于盒盖3传输过程中的限位,避免其掉落;其中,所述第一传送带501包括两个,且相对设置,两个所述第一传送带501之间具有空隙,盒盖3的两侧分别位于一个所述第一传送带501上,所述空隙用于容纳盒盖3上的突出物体,所述边挡502和所述第一端挡503分别包括两个,每个所述第一传送带501对应设置一个所述边挡502和一个所述第一端挡503,两个所述边挡502位于盒盖3两侧,至少一个所述边挡502能够相对所述第一传送带501移动,以调节两个所述边挡502之间的间距,适应不同纸质包装盒不同宽度的盒盖3,所述边挡502连接所述第一端挡503。
如图24所示,所述第二打胶机用于对盒体1端部相邻的三个内侧面上的盒体打胶区域12进行打胶。
如图2至图4、图24至图32所示,所述第三成型机构包括盒体1传输部件、第三转运部件605和往复运动部件,所述第三成型机构用于使所述成型头202伸入盒体1内,并将所述成型头202上三折的围条2与盒体1的所述盒体打胶区域12对齐,使围条2左右两段和盒盖3尾段粘结于盒体1端部内侧面。
具体地,所述第三转运部件605用于依次将一个盒体1转运到盒体对位区域11,位于所述盒体对位区域11的盒体1的口开端对齐所述成型头202,如图2至图4、图24至图25所示,所述第三转运部件605包括第三吸头、第三横移组件和第三竖移组件;所述第三吸头能够产生吸力,所述第三吸头用于吸附盒体1;所述第三吸头连接于第三竖移组件,所述第三竖移组件滑动连接于所述第三横移组件,所述第三横移组件带动所述第三竖移组件在所述盒体1传输部件和所述盒体对位区域11之间移动,所述第三竖移组件带动所述第三吸头上下升降移动,使所述第三吸头在所述盒体1传输部件处能够吸合盒盖3,并将盒盖3放置于所述盒体对位区域11上;所述第三横移组件带动所述第三吸头移动是通过行程开关的方式或者程序控制路径的方式实现,使得所述第三吸头能够分别与所述盒体1传输部件和所述盒体对位区域11对齐,所述第三竖移组件带动所述第三吸头升降是通过行程开关的方式或者程序控制路径的方式实现,使得所述第三吸头能够吸放所述盒体1传输部件处或所述盒体对位区域11处的盒体1
具体地,所述往复运动部件用于带动位于所述盒体对位区域11的盒体1靠近所述成型头202、或者用于带动位于所述成型头202处成型的纸质包装盒回到所述盒体对位区域11,所述往复运动部件包括卡座和轨道,所述卡座滑动连接于所述轨道,所述卡座用于卡接定位盒体1,所述轨道用于输送所述卡座靠近或者远离所述成型头202。
具体地,所述盒体1传输部件用于依次传输若干个盒体1,如图24所示,所述盒体1传输部件包括第二传送带601和第二端挡602,所述第二传送带601用于传输盒体1,所述第二端挡602设于所述第二传送带601末端,所述第二端挡602用于盒体1的定位;所述第二传送带601上设有第一档板603和第二档板604,所述第一档板603与所述第二端挡602的间距大于一个盒体1的宽度,所述第一档板603能够挡停所述第二传送带601上的盒体1,使得所述第二打胶机对盒体1上所述盒体打胶区域12进行打胶,所述第一档板603位于所述第二档板604和所述第二端挡602之间,所述第二档板604能够挡停所述第二传送带601上的盒体1,使得所述第一档板603能够放行已打胶的盒体1。
具体地,如图26至图32所示,所述第三成型机构还包括一个第一压板606和三个第二压板607,所述第一压板606用于将盒盖3相对所述成型头202固定,使得所述成型头202能够伸入盒体1内;所述第二压板607用于围条2与所述盒体打胶区域12对齐后将盒体1侧壁压于所述成型头202上,使盒盖3与盒体1粘结。
如图2至图4所示,该全自动纸质包装盒成型设备还包括第三传送带703,所述第三传送带703用于传输成型的纸质包装盒;所述第三传送带703与所述盒体1传输部件分别位于所述盒体对位区域11两侧,所述第三转运部件605还用于依次将所述盒体对位区域11处的成型的纸质包装盒转运到所述第三传送带703上;具体地,所述第三转运部件605包括两套所述第三吸头,两套所述第三吸头之间通过横梁连接,两套所述第三吸头之间的间距适配所述盒体对位区域11与所述第二传送带601之间的间距,所述盒体对位区域11与所述第二传送带601之间的间距适配所述盒体对位区域11与所述第三传送带703之间的间距,即一套所述第三吸头将所述第二传送带601末端处的盒体1吸合时,另一套所述第三吸头能够将所述盒体对位区域11处已成型的纸质包装盒吸合,所述第三转运部件605运动后,将盒体1放置在所述盒体对位区域11处,同时将成型的纸质包装盒放置在所述第三传送带703上;所述第三传送带703头端连接有周转平台701,所述周转平台701上设有机器人抓手702,所述第三转运部件605将所述盒体对位区域11处成型的纸质包装盒转运到所述周转平台701上,所述机器人抓手702用于将所述周转平台701上成型的纸质包装盒转运到所述第三传送带703上,所述机器人抓手702转运过程中对成型的纸质包装盒翻身,由于所述盒体对位区域11处成型的纸质包装盒保持其在所述成型头202处的状态,即盒盖3对齐盒体1顶面,在脱离所述成型头202后盒盖3形成悬臂端,不利于后续运输,因而采用所述机器人抓手702将成型的纸质包装盒翻身,使对齐盒体1顶面的盒盖3翻身对齐盒体1底面,以便盒体1和盒盖3同时接触所述第三传送带703,避免盒盖3悬臂及传输过程中跳动损坏。
所述控制机构电性连接所述第一成型机构、所述第一打胶机401、所述第二成型机构、所述第二打胶机和所述第三成型机构,所述控制机构用于控制所述第一成型机构、所述第一打胶机401、所述第二成型机构、所述第二打胶机和所述第三成型机构的运行;具体地,所述控制机构包括工业电脑、工控机或者plc。
作为本实施例的一个优选方案,所述吸口203、所述第一吸头、所述第二吸头、所述第三吸头分别通过导管连通负压机,所述负压机用于产生负压,以此为所述吸口203、所述第一吸头、所述第二吸头、所述第三吸头提供吸力,所述吸口203、所述第一吸头、所述第二吸头、所述第三吸头还分别对应设有一个阀门,以阻断负压吸力。
运用本实用新型所述的一种全自动纸质包装盒成型设备,通过所述第一成型机构依次将一张围条2弯折,利用所述第一打胶机401依次对每一张弯折好的围条2上所述盒体打胶区域12均匀打胶,然后通过所述第二成型机构将盒盖3与围条2粘结成型,利用第二打胶机对盒体1端部内壁的所述盒体打胶区域12均匀打胶,最后通过所述第三成型机构将盒体1、盒盖3与围条2组装粘结,该设备能够自动打胶、自动定位、自动组装,打胶均匀、组装位置统一、节约人工4人,能够采用自动流水线作业,提高了工作效率,生产的纸质包装盒产品优良,良品率高,降低了生产成本。
实施例2
如图2至图32所示,一种全自动纸质包装盒成型方法,应用如实施例1所述全自动纸质包装盒成型设备,该方法包括:
a、使用所述第一成型机构将长方条的围条2折叠成三段,并且围条2贴合于所述成型头202表面,具体为:
如图2或图3或图4所示,所述转盘200转动90度,四个所述成型头202能够分别与所述围条对位区域21、所述第一打胶机401、所述盒盖3传输部件和所述盒体对位区域11对齐;
如图7、图9和图10所示,所述推料板106由所述安装座102底部的所述推料口105伸出,推出一张围条2进入所述围条对位区域21;
所述第一横移组件带动所述第一竖移组件至所述围条对位区域21上方,所述第一竖移组件带动所述第一吸头下降,所述第一吸头吸合围条2;
如图8和图11所示,所述第一竖移组件带动所述第一吸头上升,如图12所示,所述第一横移组件带动所述第一竖移组件至对位的所述成型头202上方,所述第一竖移组件带动所述第一吸头下降,所述第一吸头将围条2中段放置在所述成型头202上,所述吸口203吸合围条2中段;
所述推料板106收回,所述安装座102中的围条2在重力作用下下落,底张围条2落入所述推料板106的所述放料槽107中;
如图13所示,所述成型器沿所述第二滑轨移动,靠近对位的所述成型头202,两个所述转辊304移动至围条2上方,如图14和图15所示,所述第一滑块303沿所述第一滑轨302向下移动,带动所述转辊304滚压围条2两侧段,使围条2两侧段向下弯折90度,并被对应的所述吸口203吸合,如图16所示,所述成型器沿所述第二滑轨移动,远离对位的所述成型头202;
如图17所示,所述第一吸头吸力隔断,所述第一竖移组件带动所述第一吸头上升,远离围条2,所述第一滑块303复位。
b、利用所述第一打胶机401对三折的围条2中段外侧的所述围条打胶区域22进行打胶,具体为:
如图2或图3或图4所示,所述转盘200转动90度,吸合有围条2的所述成型头202转动至所述第一打胶机401处,如图18所示,所述第一打胶机401在所述围条打胶区域22处打胶。
c、使用所述第二成型机构将盒盖3尾段与围条2中段对齐并粘接,具体为:
如图2或图3或图4所示,所述转盘200转动90度,如图19所示,吸合打胶后围条2的所述成型头202转动至所述盒盖3传输部件处;
所述第二横移组件带动所述第二竖移组件至所述第一传送带501尾端上方,所述第二竖移组件带动所述第二吸头下降,所述第二吸头吸合所述第一传送带501传输的盒盖3;
如图19所示,所述第二竖移组件带动所述第二吸头上升,如图20和图21所示,所述第二横移组件带动所述第二竖移组件至对位的所述成型头202上方,此时盒盖3尾段对齐围条2中段,如图22所示,所述第二竖移组件带动所述第二吸头下降,所述第二吸头将盒盖3尾段放置在所述围条打胶区域22上,此时所述压块505压紧盒盖3和围条2,盒盖3和围条2粘结;
所述第二吸头吸力隔断,所述第二竖移组件带动所述第二吸头上升,远离盒盖3,如图23所示盒盖3和围条2粘结成型。
d、利用所述第二打胶机对盒体1端部相邻的三个内侧面上的所述盒体打胶区域12进行打胶,具体为:
如图24所示,盒体1沿所述第二传送带601依次传输,所述第一档板603阻挡所述第二传送带601上一个盒体1,所述第二档板604阻挡与其相邻的盒体1,在本实施例中,优选所述第一档板603上下升降设置,阻挡盒体1中部,优选所述第二档板604左右伸缩设置,阻挡盒体1开口端部;所述第一档板603阻挡盒体1时,所述第二打胶机对其阻挡的盒体1端部的上、左、右三个内侧面处的所述盒体打胶区域12进行打胶,打胶时打胶喷头伸入盒体1开口端内,打胶完成后,所述第一档板603上升,放行已打胶盒体1,此时所述第二档板604仍然阻挡后续盒体1,已打胶盒体1驶过所述第一档板603后,所述第一档板603下降,此时所述第二档板604放行后续盒体1,后续盒体1被所述第一档板603阻挡后,所述第二档板604伸入相邻盒体1中。
e、使用所述第三成型机构将所述成型头202伸入盒体1内,并将所述成型头202上三折的围条2与盒体1的所述盒体打胶区域12对齐,使围条2左右两段和盒盖3尾段粘结于盒体1端部内侧面,具体为:
如图2或图3或图4所示,所述转盘200转动90度,如图24所示,吸合盒盖3和围条2粘结成型的所述成型头202转动至所述盒体对位区域11处;
如图24所示,所述第三横移组件带动所述第三竖移组件至所述第二传送带601尾端上方,所述第三竖移组件带动所述第三吸头下降,所述第三吸头吸合所述第二传送带601传输的盒体1;
如图24所示,所述第三竖移组件带动所述第三吸头上升,所述第三横移组件带动所述第三竖移组件至所述盒体对位区域11上方,所述第三竖移组件带动所述第三吸头下降,所述第三吸头将盒体1放置在所述盒体对位区域11处,此时盒体1的开口端对齐对位的所述成型头202;
如图25所示,所述第三吸头吸力隔断,所述第三竖移组件带动所述第三吸头上升,远离盒体1;
如图26所示,所述第一压板606运动压住盒盖3,压住的部位不位于盒盖3尾段,保持盒盖3相对所述成型头202固定;
如图26至图28所示,所述往复运动部件带动盒体1靠近对位的所述成型头202,并且所述成型头202伸入盒体1内,围条2对齐所述盒体打胶区域12;
如图29和图30所示,三个所述第二压板607分别压紧围条2对应的盒体1外壁,使围条2、盒盖3与盒体1粘结;
如图31和图32所示,撤去所述第一压板606和所述第二压板607远离盒盖3和盒体1,本实施例中优选先撤去所述第一压板606,再撤去所述第二压板607,盒盖3与盒体1粘结成型;
所述成型头202上的所述吸口203吸力隔断,所述往复运动部件带动成型的纸质包装盒移回到所述盒体对位区域11处,如图2或图3或图4所示,所述转盘200转动90度,空置的所述成型头202转动与所述围条对位区域21对齐,进入下一作业循环。
f、将成型的纸质包装盒依次传输,具体为:
如图2所示,所述第三转运部件605在所述盒体对位区域11处吸合成型的纸质包装盒;
如图3所示,所述第三转运部件605将成型的纸质包装盒移动并放置到所述周转平台701处;
如图4所示,所述周转平台701处的所述机器人抓手702夹持成型的纸质包装盒,移动并翻转成型的纸质包装盒到所述第三传送带703上,使盒盖3和盒体1均放置在所述第三传送带703上,所述第三传送带703传输成型的纸质包装盒,如图2所示。
运用本实用新型所述的一种全自动纸质包装盒成型方法,通过所述第一成型机构依次将一张围条2弯折,利用所述第一打胶机401依次对每一张弯折好的围条2上所述盒体打胶区域12均匀打胶,然后通过所述第二成型机构将盒盖3与围条2粘结成型,利用第二打胶机对盒体1端部内壁的所述盒体打胶区域12均匀打胶,最后通过所述第三成型机构将盒体1、盒盖3与围条2组装粘结,该设备能够自动打胶、自动定位、自动组装,打胶均匀、组装位置统一、节约人工4人,能够采用自动流水线作业,提高了工作效率,生产的纸质包装盒产品优良,良品率高,降低了生产成本。
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。