1.本发明涉及一种装载机铲装技术,更具体地说,涉及一种装载机铲斗接触物料的辨识系统和方法。
背景技术:
2.随着用工成本的不断增加,以及智能化技术的发展,装载机的无人化自主作业将会成为未来的发展趋势。
3.装载机的自主化作业过程仍需要解决诸多问题,其中如何识别铲斗接触到物料并正确的激活铲装动作,这需要一系列有效的判断和处理机制。
4.铲斗接触到物料是指铲斗插入到物料中一定深度,随后可进行收斗和抬升动臂以便使物料入斗的铲装动作。目前在非自主作业装载机上已有通过油缸压力和车速等作为铲装动作开始的判断条件的,但仍无法很好的满足装载机无人化自主化作业的需要,仍需要探索采用更加有效的判断和处理方法,以满足自动化和无人化铲装作业的发展需要。
技术实现要素:
5.本发明要解决的技术问题是针对现有铲斗接触物料辨识技术不能很好满足装载机自主作业的问题,而提供一种装载机铲斗接触物料的辨识系统和方法,使装载机在无人化作业时更好地辨识铲斗接触物料以触发铲装动作。
6.本发明为实现其目的的技术方案是这样的:提供一种装载机铲斗接触物料的辨识系统,包括装载机,装载机包含用于检测装载机位姿状态的位姿传感器;其特征在于系统还包括:
7.至少三个uwb基站,布置于装载机作业场地,其中至少有三个uwb基站处于同一个水平面上以确定uwb基站平面坐标系;
8.所述装载机上设置有数据处理模块、与uwb基站进行单边双向通信测距的车载定位uwb标签;
9.料堆轮廓标定装置,用于标定待铲装料堆轮廓上若干点位置并传送至所述数据处理模块;
10.所述数据处理模块通过车载定位uwb标签的测距信息、装载机外形尺寸和位姿状态确定uwb基站平面坐标系内装载机外形投影轮廓的位置、通过待铲装料堆轮廓上若干点位置信息解算待铲装料堆轮廓在uwb基站平面坐标系内的位置;
11.所述数据处理模块根据uwb基站平面坐标系内待铲装料堆轮廓与装载机外形投影轮廓的相对位置和装载机工作参数辨识铲斗是否接触物料。
12.在本发明中,通过多个uwb基站确定坐标系,通过uwb标签确定装载机的位置和料堆的位置,通过装载机与料堆位置对比并结合机器工作参数判定铲斗是否接触到物料。本发明通过装载机与料堆位置进行对比判定铲斗是否接触物料,与待铲装物料的属性无关,不容易产生误判。
13.在上述装载机铲斗接触物料的辨识系统中,所述uwb基站为四个,其中三个uwb基站呈直角三角形布置组成uwb基站平面坐标系的x轴和y轴,第四个uwb基站与其他三个uwb基站非共面布置,各uwb基站之间的距离已知。通过布置多个不是全部共面的uwb基站,使得uwb标签测距更加准确。
14.在上述装载机铲斗接触物料的辨识系统中,所述位姿传感器包括用于测定装载机在坐标系中朝向的陀螺仪或者所述车载定位uwb标签的数量至少为两个且安装在装载机上不同位置。使用两个车载定位uwb标签,可以获得装载机上两个点与各uwb基站之间的距离,结合装载机自身的几何外形和位姿传感器检测到装载机转向角度,可以确定装载机轮廓在uwb基站平面坐标系内的位置,包括装载机的朝向。或者通过一个uwb标签获取装载机上一个点在uwb基站平面坐标系内的位置,再通过位姿传感器如陀螺仪测定装载机相对地面的朝向,预先测定uwb基站平面坐标系相对地面的朝向,再坐标转换后确定装载机在uwb基站平面坐标系内的朝向。
15.在上述装载机铲斗接触物料的辨识系统中,所述装载机上还安装有用于作业过程中基于初始位置推算装载机的航迹和航向的惯性导航模块,所述惯性导航模块与装载机上一个车载定位uwb标签安装在同一位置;所述数据处理模块依据车载定位uwb标签的测距信息和所述惯性导航模块的导航定位信息解算uwb基站平面坐标系内装载机外形投影轮廓的位置,通过惯性导航模块定位和uwb标签测距定位结合对装载机位置进行定位,提高装载机定位精度。
16.在上述装载机铲斗接触物料的辨识系统中,所述装载机上设置有与所述数据处理模块连接的第一无线数据收发模块;所述料堆轮廓标定装置上设置有与uwb基站进行单边双向通信测距的料堆定位uwb标签和用于与第一无线数据收发模块无线通信传递料堆定位uwb标签测距信息的第二无线数据收发模块。料堆定位uwb标签与uwb基站通信测距确定料堆轮廓标定装置在uwb基站平面坐标系内位置,然后料堆轮廓标定装置沿着待铲料堆的轮廓移动,通过标定待铲料堆轮廓上多个点的位置而确定待铲料堆轮廓在uwb基站平面坐标系内位置。料堆轮廓标定装置也可以处于待铲料堆上方,通过摄像、激光雷达扫描等手段获取待铲料堆的轮廓和相对地面的角度,在经确定uwb基站平面坐标系相对地面的关系进行转换而确定待铲料堆在uwb基站平面坐标系中的位置。
17.在上述装载机铲斗接触物料的辨识系统中,所述装载机上设置有用于显示uwb基站平面坐标系、基站平面坐标系中待铲装料堆轮廓和装载机外形投影轮廓的显示模块。
18.在上述装载机铲斗接触物料的辨识系统中,所述装载机为铰接式装载机,所述车载定位uwb标签相对后车架固定安装布置。
19.在上述装载机铲斗接触物料的辨识系统中,所述位姿传感器包括:用于检测装载机前后车架相对转动角度的转向角度传感器、用于检测动臂转动角度的动臂传感器、用于检测铲斗转动角度的转斗传感器。
20.本发明为实现其目的的技术方案是这样的:提供一种装载机铲斗接触物料的辨识方法,其特征在于包括如下步骤:
21.利用至少三个布置于作业现场的uwb基站确定uwb基站平面坐标系;
22.测定待铲装料堆轮廓并解算待铲装料堆轮廓在uwb基站平面坐标系内的位置;
23.通过装载机上车载定位uwb标签与各uwb基站的测距信息、装载机外形尺寸和位姿
状态确定uwb基站平面坐标系内装载机外形投影轮廓的位置;
24.依据uwb基站平面坐标系中待铲装料堆轮廓和装载机外形投影轮廓相对位置和装载机工作参数辨识铲斗是否接触物料,当依据装载机工作参数推定装载机处于铲装预备状态且在预定时间内uwb基站平面坐标系中装载机外形投影轮廓前端与待铲装料堆轮廓相交或距离小于预定值时辨识为铲斗与物料接触。
25.在上述装载机铲斗接触物料的辨识方法中,测定待铲装料堆轮廓时通过带有与uwb基站进行单边双向通信测距的uwb标签的料堆轮廓标定装置测定待铲装料堆轮廓上多点与各uwb基站的距离,通过待铲装料堆轮廓上多点与各uwb基站的距离解算待铲装料堆轮廓在uwb基站平面坐标系内的位置。
26.本发明与现有技术相比,在本发明通过多个uwb基站确定坐标系,通过uwb标签确定装载机的位置和料堆的位置,对比装载机与料堆位置并结合机器工作参数判定铲斗是否接触到物料。本发明通过装载机与料堆位置进行对比判定铲斗是否接触物料,与待铲装物料的属性无关,不容易产生误判。
附图说明
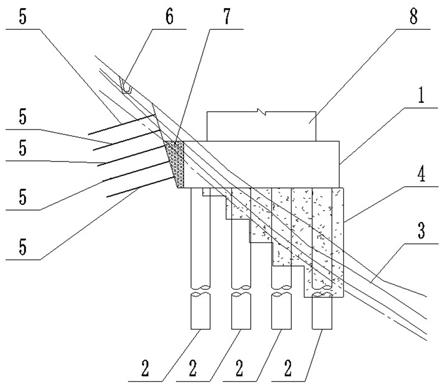
27.图1是本发明装载机作业场景示意图。
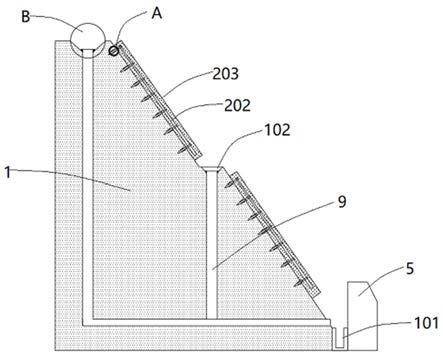
28.图2是uwb基站坐标系示意图。
29.图3是uwb基站、料堆轮廓标定装置和装载机之间的通信示意图。
30.图中零部件名称及序号:
31.uwb基站1、装载机2、数据处理与显示模块21、车载定位uwb标签22、惯性导航模块23、整车控制单元24、无线数据收发模块25、料堆3、卸料平台4、料堆轮廓标定装置5、料堆定位uwb标签51、无线数据收发模块52。
具体实施方式
32.下面结合附图说明具体实施方案。
33.本发明中装载机铲斗接触物料的辨识系统,包括四个uwb基站1,装载机2、料堆轮廓标定装置5。
34.如图1所示,uwb基站1设置在装载机作业现场周围,其中三个uwb基站处于同一个水平面上,组成作业场地的x轴和y轴,形成uwb基站平面坐标系。另一个uwb基站与其他三个uwb基站非共面设置,每个uwb基站之间的相互距离已知。作业现场具有待铲的料堆3、卸料平台4等。
35.装载机具有前车架和后车架,前车架和后车架可相对转动,装载机通过前车架和后车架的相对转动来转向。
36.在装载机上设置有两个与uwb基站进行双向通信测距的uwb标签,该两个uwb标签为车载定位uwb标签22,两个车载定位uwb标签安装在装载机的两个不同部位(在作业面上的投影处于不同位置),两者之间具有一定的距离。车载定位uwb标签22通过与uwb基站进行双向通信测距,获取两个车载定位uwb标签与各个uwb基站的测距信息,根据装载机两个点(车载定位uwb标签安装位置)上测距信息可解算出装载机2相对各uwb基站1的距离和朝向。
37.如图3所示,装载机2上还设置有数据处理和显示模块21(由数据处理模块和显示
模块整合而成)、惯性导航模块23、无线数据收发模块25、位姿传感器(图中未示出)、整车控制单元24。车载定位uwb标签22、惯性导航模块23、无线数据收发模块25、车载控制单元24与数据处理和显示模块21相连,数据处理和显示模块21通过控制单元获取位姿传感器的检测数据。
38.惯性导航模块23安装位置与两个车载定位uwb标签22中的其中一个的安装位置相同,用于作业过程中基于初始位置推算装载机的航迹和航向。惯性导航模块23与车载定位uwb标签22对装载机进行组合定位,惯性导航模块23与车载定位uwb标签22的定位数据由数据处理和显示模块21按一定方式进行数据融合后得出装载机在uwb基站坐标系内的具体位置。
39.位姿传感器包括用于检测装载机前后车架相对转动角度的转向角度传感器、用于检测动臂转动角度的动臂传感器、用于检测铲斗转动角度的转斗传感器。
40.如图3所示,本实施例中的料堆轮廓标定装置5用于对料堆轮廓进行定位,为一种遥控设备,例如遥控无人飞机或遥控小车,其上设置有无线数据收发模块52和一个与uwb基站进行双向通信测距的uwb标签,该uwb标签为料堆定位uwb标签51。
41.料堆定位uwb标签51与无线数据收发模块52连接,料堆轮廓标定装置5通过遥控器进行遥控,可通过遥控器遥控料堆定位uwb标签51与uwb基站1进行单边双向通信测距,并将测距信息通过无线数据收发模块52发送至装载机上的无线数据收发模块25,然后进一步传输至装载机上的数据处理和显示模块21,由数据处理和显示模块21解算出料堆定位uwb标签51的位置。
42.数据处理和显示模块21用于收集包括料堆定位uwb标签51和车载定位uwb标签22的测距信息、惯性导航模块23的定位信息、位姿传感器的数据以及装载机运行的工作参数,并对收集的数据进行处理,解算出装载机2和料堆3在uwb基站平面坐标系内的位置以及投影轮廓,并以显示模块左下角作为坐标原点对定位物体在x轴和y轴坐标平面内的投影轮廓按一定比例进行图形化显示。
43.装载机2的工作参数包括但不限于为装载机提供动力的发动机或电机的转速、挡位等。
44.装载机铲斗接触物料的辨识系统判别铲斗是否接触物料的方法如下:
45.利用四个布置于作业现场的uwb基站1确定uwb基站平面坐标系;
46.测定待铲装料堆轮廓并解算待铲装料堆轮廓在uwb基站平面坐标系内的位置;
47.通过装载机上两个车载定位uwb标签22与各uwb基站的测距信息、装载机外形尺寸和位姿状态确定uwb基站平面坐标系内装载机2的外形投影轮廓的位置;
48.依据uwb基站平面坐标系中待铲装料堆轮廓和装载机外形投影轮廓相对位置和装载机工作参数辨识铲斗是否接触物料,当依据装载机工作参数推定装载机处于铲装预备状态且在预定时间内uwb基站平面坐标系中装载机外形投影轮廓前端与待铲装料堆轮廓相交或距离小于预定值时辨识为铲斗与铲装物料堆接触。
49.在测定待铲装料堆轮廓时通过带有与uwb基站进行单边双向通信测距的uwb标签的料堆轮廓标定装置测定待铲装料堆轮廓上多点与各uwb基站的距离,通过待铲装料堆轮廓上多点与各uwb基站的距离解算待铲装料堆轮廓在uwb基站平面坐标系内的位置。
50.本发明铲斗是否接触物料的辨识方法中,通过车载定位uwb标签22和惯性导航模
块23对装载机2进行组合定位,通过位姿传感器检测装载机的位姿,然后通过无线或有线的方式将数据汇集至数据处理和显示模块,数据处理和显示模块结合定位数据、装载机的位姿数据和外形尺寸、以及车载定位uwb标签的安装位置解算出装载机在uwb基站平面坐标系内的外形投影轮廓,以前车架和后车架两个矩形框近似表示。通过遥控料堆轮廓标定装置对料堆边缘上的多个点进行定位,并将定位数据无线传输存储至数据处理和显示模块,数据处理和显示模块结合料堆轮廓标定装置的定位数据解算出多个定位点的位置,并将多个定位点在uwb基站平面坐标系内的投影连成一个封闭区间近似表征料堆的轮廓。
51.在铲装作业开始前对料堆的外形轮廓进行定位,通过遥控器遥控料堆轮廓标定装置到达料堆边缘的上方,遥控控制料堆定位uwb标签依次向各uwb基站发起测距请求,料堆定位uwb标签通过单边双向测距获取测距信息后将测距信息通过料堆轮廓标定装置上的无线数据收发模块传输至数据处理和显示模块,数据处理和显示模块首先根据料堆定位uwb标签的测距信息解算出料堆定位uwb标签与各uwb基站的距离,然后根据料堆定位uwb标签与各uwb基站的距离解算出料堆定位uwb标签的位置并进行存储。当完成一个定位点的定位后,在遥控器上会有指示灯或显示器文字提示,可通过遥控器上的撤销按钮逐个撤销已完成定位点的数据,同时遥控器上会显示当前有效定位点的数量。完成单个点定位后再依次在料堆周围进行多个点定位,由多个定位点在uwb基站平面坐标系内的位置连成一个封闭的区间近似表示料堆的轮廓,并按一定显示比例在数据处理和显示模块上进行显示。
52.装载机在作业过程中,车载定位uwb标签周期性地依次向各uwb基站发送测距请求,通过单边双向测距获取测距信息,再由数据处理和显示模块解算出各车载定位uwb标签的位置。同时,惯性导航模块也实时地对装载机的航迹和航向进行推算,结合初始位置和航迹航向信息可定位装载机的位置,数据处理和显示模块将车载定位uwb标签的定位数据和惯性导航模块的定位数据按一定方式进行数据融合后得出最终的定位位置,再根据车载定位uwb标签的安装位置、装载机的位姿(前车架和后车架相对转动的角度)和外形尺寸,在uwb基站平面坐标系内以前车架和后车架两个矩形框近似表示装载机的投影轮廓,如图2所示。
53.当装载机的工作装置处于铲装预备状态,即装载机提供动力的发动机或电机转速不为零时,装载机处于前进状态,当数据处理和显示模块检测到装载机的外形投影轮廓的前车架矩形框的前端与料堆的外形投影轮廓相交或距离小于一定值时,且装载机的连续多次定位位置无明显变化时,则判定装载机铲斗已经插入物料,随后数据处理和显示模块给装载机上的控制单元发送控制指令控制装载机完成预定的铲装动作,即完成收斗和举升动臂的动作。装载机的工作装置处于铲装预备状态由数据处理和显示模块通过位姿传感器检测动臂和铲斗的姿态,当铲斗处于贴地放平状态时,则认为处于铲装预备状态。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。