1.本发明是关于一种化验室的智能复合系统,特别是指其与染整厂化验室作业流程的智能化、模组化、自动化、无人化、精确控制有关的一种化验室滴液机及试色机智能复合系统。
背景技术:
2.一般染整厂化验室试颜色的过程,都存在有以下的共同问题:
3.1.虽然有自动滴液机可以做精确的计量,但是后续还是需要人力把待染色样布放入试色杯,锁好杯盖,由人工拿试色的杯子放入到指定试色机,并以人工设定染色升降温的染色程序,待染程结束后还需要人工手动拿出杯子,放入下一批试色杯子,整个作业耗时、耗人力且容易出错。
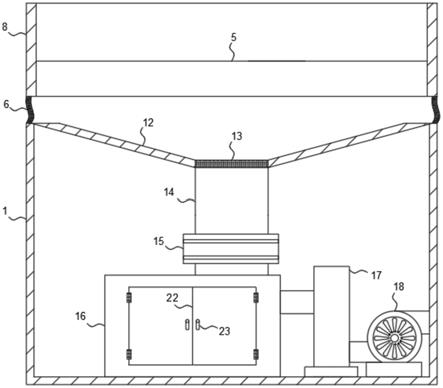
4.2.请参阅图12,传统的滴液机强调dosing&dye设计,其构造包括一滴液区91、一染色区92及设于滴液区91、染色区92之间的待染色样布93,以及一可移动、模仿人类手臂功能的机械手臂94,该滴液机内部整合包括染色机的功能,以预期得到无人化作业。但是有如下限制与问题:
5.(1)泡母液、滴液和染色均放在相同一机器,一机械手臂94同时只能做一件事,效率低;
6.(2)机构复杂,体积太大,投资成本高;
7.(3)滴液区91一般每小时可以产出30-60个染色配方,但是染色区每一个杯位,每2-3小时才产出一杯,效率无法匹配;
8.(4)染色区数量有限,如欲扩充很多染色区杯位在同一机器,整台机器的机构变得庞大,成本也会太高。
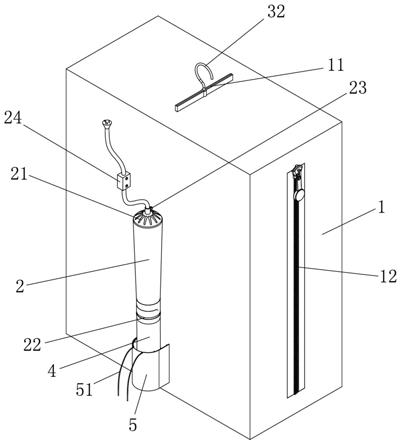
9.3.现有技术中有一种设计是在滴液机95滴液后用管路分配器96进行管路输送到染色机97,把滴液机95完成的染液使用管路输送到染色机97,以预期得到无人化作业。但是有如下限制与问题,如图13:
10.(1)因为化验室的染色样品纤维重量很小,介于几克到几十克之间,所以染液或化学药品依照纤维用量比例计算也是很少,也是介于几克到几十克之间,所以用管路输送即使残留很少,比例上也会造成损失,影响准确性;
11.(2)再加上浴比(liquor ratio)限制总水量,无法用水大量清洗管路,导致残留影响准确性;
12.(3)管路距离限制,长度越长,需要清洗水量越多,另外还要有阀件控制管路开关增加成本。
13.上述染整厂化验室试颜色过程所存在的问题,确实有待克服。
技术实现要素:
14.本发明提供了一种整合滴液机、机械手臂、试色机染呈自动控制的化验室智能复
合系统。
15.为达上述目的,本发明包括至少一控制单元、至少一滴液机、至少一染色准备区、至少一机械手臂和至少一试色机,该滴液机用以滴出所需染液到多个染色杯;该染色准备区邻近该滴液机,该染色准备区包括多个待染色样布、一杯盖放置区和一染色杯组合暂存区;该机械手臂邻近该染色准备区;该试色机邻近该机械手臂,该试色机包括多个试色机染色杯位;其中,该控制单元电性连接该滴液机、该机械手臂和该试色机,该机械手臂依据该控制单元设定的工序步骤指令,把滴液完成的染色杯取起并放置在该染色组合暂存区,再夹取该待染色样布放入染色杯中,该机械手臂再取起杯盖放置区的杯盖与染色杯锁固,之后该机械手臂把染色杯放入指定位置的试色机当中的该试色机染色杯位。
16.进一步地,该滴液机包括一输送装置,用以将完成滴液作业并、承接有染液的染色杯输送到该滴液机一侧的滴液完成试色杯区。
17.进一步地,该染色准备区包括一完成染色区,通过该机械手臂将在该试色机染色杯位完成染色作业的染色杯取出并放置收集于完成染色区。
18.进一步地,该染色准备区包括一滴液完成试色杯区,用以放置完成滴液作业并承接有染液的染色杯。
19.进一步地,该机械手臂设于两个机械手臂移动轨道上,通过该机械手臂移动轨道移动。
20.进一步地,该染色准备区、该机械手臂设于一机械手臂移动agv自走车上,通过该机械手臂移动agv自走车移动。
21.进一步地,该控制单元包括一顺序排缸作业控制模组,用以控制染色的执行顺序排缸作业。
22.进一步地,该控制单元包括一滴液顺序和配方控制模组,用以控制滴液机的滴液顺序和配方的排列。
23.进一步地,该控制单元包括一染色升降温控制模组,用以控制、设定试色机的染色升降温曲线。
24.本发明的有益效果为:通过控制单元、机械手臂的连结作用,把染整厂化验室的自动滴液机和试色机作业智能化、模组化及操作无人化的整合。
25.本发明与现有技术手段比较优势如下:
26.27.[0028][0029]
以下仅通过具体实施例,且佐以附图作详细的说明,使对于本发明的各项功能、特点,有更进一步的了解与认识。
附图说明
[0030]
图1是本发明的上视图;
[0031]
图2是本发明的立体图;
[0032]
图3至图6是本发明的使用实施例图;
[0033]
图7是本发明机械手臂设在机械手臂移动轨道上的上视图;
[0034]
图8是本发明染色准备区、机械手臂设于机械手臂移动agv自走车上的上视图;
[0035]
图9至图11是本发明控制单元其人机介面所显示的功能画面;
[0036]
图12是传统染色技术、构造的上视图;
[0037]
图13是传统染色技术、构造的示意图。
[0038]
附图标记说明
[0039]
1 染色杯
[0040]
10 控制单元20滴液机
[0041]
21 输送装置
[0042]
30 染色准备区
[0043]
31 滴液完成试色杯区
[0044]
32 待染色样布
[0045]
33 杯盖放置区
[0046]
331 杯盖
[0047]
34 染色杯组合暂存区
[0048]
35 完成染色区
[0049]
40 机械手臂
[0050]
41 机械手臂移动轨道
[0051]
42 机械手臂移动agv自走车
[0052]
50 试色机
[0053]
51 试色机染色杯位
[0054]
现有技术:
[0055]
91 滴液区
[0056]
92 染色区
[0057]
93 待染色样布
[0058]
94 机械手臂
[0059]
95 滴液机
[0060]
96 管路分配器
[0061]
97 染色机。
具体实施方式
[0062]
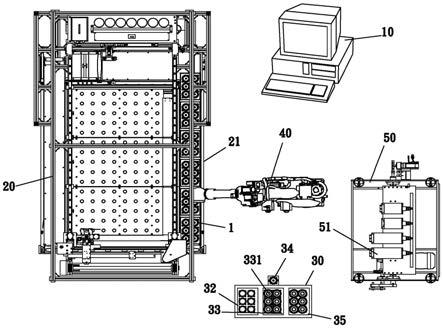
请参阅图1、图2所示,本发明包括一控制单元10、一滴液机20、一染色准备区30、一机械手臂40和一试色机50。下文将详细说明:
[0063]
该滴液机20用以滴出所需染液到多个染色杯1。
[0064]
该染色准备区30邻近该滴液机20,该染色准备区30包括多个待染色样布32,还包括一杯盖放置区33、一染色杯组合暂存区34。
[0065]
该机械手臂40邻近该染色准备区30。
[0066]
该试色机50邻近该机械手臂40,该试色机50包括多个试色机染色杯位51。
[0067]
将该控制单元10电性连接该滴液机20、该机械手臂40、该试色机50,该机械手臂40依据该控制单元10设定的工序步骤指令,把滴液完成的染色杯1取起并放置在该染色组合暂存区34,再夹取该待染色样布32放入染色杯1中,该机械手臂40再取起杯盖放置区33的杯盖331把染色杯1锁固,之后,该机械手臂40把染色杯1放入试色机50当中的指定位置的该试色机染色杯位51。
[0068]
在一实施例,该滴液机20包括一输送装置21,用以将完成滴液作业、承接有染液的染色杯1输送到该滴液机20一侧的滴液完成试色杯区31,据此,使该包括染液的染色杯1较靠近该机械手臂40、染色准备区30,以利于后续染色准备作业的进行。
[0069]
在一实施例,该染色准备区30包括一完成染色区35,通过该机械手臂40将在该试色机染色杯位51完成染色作业的染色杯1取出并放置收集于完成染色区35。
[0070]
上述为本发明的各部分组成介绍,接着再将本发明的各种实施例、特点、效益介绍如下:
[0071]
请参阅图2、图3、图7、图8所示,机械手臂40的夹手可依顺序把该滴液机20一侧的滴液完成试色杯区31的染色杯1,逐杯取出放到染色准备区30的染色杯组合暂存区34。
[0072]
请参阅图4所示,机械手臂40的夹手再夹取染色准备区30的待染色样布32放入染色杯组合暂存区34的染色杯1中。
[0073]
请参阅图5所示,机械手臂40的夹手再夹取杯盖放置区33对应的杯盖331而把染色杯组合暂存区34的染色杯1锁固。
[0074]
请参阅图6所示,机械手臂40的夹手再夹取染色杯组合暂存区34的染色杯1,并将其放入试色机50当中的指定位置试色机染色杯位51。
[0075]
请参阅图7所示,在一实施例,该染色准备区30包括一滴液完成试色杯区31,用以放置完成滴液作业、承接有染液的染色杯1。
[0076]
该滴液机20的输送装置21也可延伸到滴液完成试色杯区31,以便将完成滴液作业、承接有染液的染色杯1直接输送到该滴液完成试色杯区31。
[0077]
在一实施例,该机械手臂40设于两个机械手臂移动轨道41上,通过该机械手臂移动轨道41而可移动,利于把该染色准备区30的染色杯1放入该试色机50当中的指定位置试色机染色杯位51。
[0078]
请参阅图8所示,在一实施例,该染色准备区30、该机械手臂40设于一机械手臂移动agv(auto guided vehicle)自走车42上,通过该机械手臂移动agv自走车42而可移动,利于把该染色准备区30的染色杯1放入该试色机50当中的指定位置试色机染色杯位51。
[0079]
请参阅图1所示,在一实施例,该控制单元10包括一顺序排缸作业控制模组,用以控制染色的执行顺序排缸作业,请配合图9所示的控制单元10,其人机介面所显示的功能画面:
[0080]
背景:该顺序排缸作业控制模组适应快速少量多样、快速反应及b2c等客户需求,需依生产机器的产能、工序流程,弹性而且合理规划排产计划。
[0081]
实施例:以时间为主轴,依据不同订单需求,如材质、样缸大小、产能负荷等条件,选择适合的试色机50作适当的排缸作业;例如图9中的h11、h12为染500cc的染色杯1;h23、h25为染1000cc的染色杯1,排单人员依照要打样的布及总浴量大小将不同的单子排在各自的机器上,滴液机20滴液完之后,机械手臂40将会将滴液好的不同大小的染色杯1,放入不同的试色机50,而试色机50将依照订单上的升降温所需打色工艺作温度控制。
[0082]
功效:调配、增进整体染程时间、能源等效益,并将对色准确性提高。
[0083]
请参阅图1所示,在一实施例,该控制单元10包括一滴液顺序和配方控制模组,用以控制滴液机20的滴液顺序和配方的排列,请配合图10所示的控制单元10其人机介面所显示的功能画面:
[0084]
背景:依照不同的染量需求选择适合的染色杯1,并依目前订单所需的打色单需求将染色杯1放至滴液机20作滴液动作。
[0085]
实施例:滴液机20依照配方将需要的染、助剂,滴液至每个染色杯1之中,例如图10所示:
[0086]
1.例如1-6染色杯1可以都是同样500cc大小杯子,所以放在同一批。
[0087]
2.例如1-6染色杯1可以都是染同样布种,所以放在同一批。
[0088]
3.例如1-6染色杯1可以都要放到同一台试色机50的试色机染色杯位51中,所以放在同一批。
[0089]
4.例如1-6染色杯1可以都要共同使用相同药剂,所以放在同一批,例如,第四杯跟第六杯有重复的94号瓶母液,可以减少取药动作,增快整个滴液的速度。
[0090]
当滴液完成并输送到滴液完成试色杯区31,控制单元10将会通知机械手臂40将染色杯1移到染色杯组合暂存区34并将待染色样布32放入滴液的染色杯1内,并自杯盖放置区33取一杯盖331而把染色杯1锁固,并依照控制单元10指定送至不同的试色机50。
[0091]
功效:有效精准安排快速的滴液计量所需药剂,降低误差、增进染色重现性。
[0092]
请参阅图1所示,在一实施例,该控制单元10包括一染色升降温控制模组,用以控制、设定试色机50的染色升降温曲线,请配合图11所示的控制单元10,其人机介面所显示的功能画面:
[0093]
背景:因为不同材质(例如棉、聚酯纤维)对应染料(例如酸性染料,分散性染料)及不同颜色(例如浅色、深色)需求,必须依照特定升降温控制才能达到正确染色。
[0094]
实施例:依照控制单元10排单设定,载入已经设定好的不同的升降温的染程工艺做染色的控制,避免人为设定错误。当染程工艺完成之后,通知控制单元10,由控制单元10呼叫机械手臂40将染色杯1取出至完成染色区35。
[0095]
功效:提升染色准确性、和转换配方条件到大量生产时更准确对色的效益。
[0096]
本发明可包括一台以上的滴液机20,各种滴液机20之间的资料数据和控制可以和自己互通也可与控制单元10互通。
[0097]
本发明可包括有一台以上机械手臂40,该机械手臂40可用类似的上下物件的驱动机构取代;各种机械手臂40之间的资料数据和控制可以自己互通也与控制单元10互通。
[0098]
本发明可包括一台以上各种试色机50或类似的试色机构;各种试色机50之间的资料数据和控制可以自己互通也与控制单元10互通。
[0099]
以上为本发明所举的实施例,仅为便于说明而设,当不能以此限制本发明的意义,即大凡依所列权利要求所做的各种变换设计,均应包括在本发明的专利范围中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。