1.本技术涉及纺织设备的领域,尤其是涉及一种喷气织机。
背景技术:
2.喷气织机是采用喷射气流牵引纬纱穿越梭口的无梭织机。工作原理是利用空气作为引纬介质,以喷射出的压缩气流对纬纱产生摩擦牵引力进行牵引,将纬纱带过梭口,通过喷气产生的射流来达到引纬的目的。
3.在织机织造完成后,需要将织物收卷到收卷辊上,然后送入下一道工艺进行精加工,此时如果织物的收卷沿收卷辊的轴向发生了偏斜,那么后续在展开时,织物也会在偏斜状态下展开,对于后续的精加工不利。
4.因此,需要一种新的方案解决上述技术问题。
技术实现要素:
5.为了对经纱进行调整,降低经纱与纬纱之间发生错位的概率,本技术提供一种喷气织机。
6.本技术提供的一种喷气织机采用如下的技术方案:
7.一种喷气织机,包括机架、连接于机架的喷气织机本体、连接于机架的收卷辊,所述收卷辊与所述喷气织机本体之间还设有调整辊、调整调整辊位置的驱动器,所述调整辊外壁呈粗糙设置且所述织物抵接于所述调整辊外壁,所述驱动器、所述调整辊均连接于机架;所述机架上还设有检测织物于调整辊上的位置的检测器、根据检测器的检测信号控制驱动器工作的控制电路。
8.通过采用上述技术方案,使用检测器实时对织物位置进行检测,防止织物出现偏斜,并且通过调整辊与织物之间的摩擦力来带动织物运动,实现对织物位置的调整。
9.优选的,所述调整辊沿水平方向设置且调整辊的轴向方向垂直于织物进料方向,所述检测器包括设于织物进料方向一侧的第一红外传感器、设于织物进料方向另一侧的第二红外传感器,所述第一红外传感器的检测点与所述第二红外传感器的检测点均与织物的边缘间隙配合,所述驱动器驱动调整辊沿其轴线向左或向右运动。
10.通过采用上述技术方案,使用第一红外传感器与第二红外传感器来对织物的边缘进行检测,在织物正常运输时,第一红外传感器与第二红外传感器检测不到织物,调整辊不动,织物正常运输;
11.当第一红外传感器或者第二红外传感器检测到织物时,说明织物发生了偏斜,此时使用使用调整辊进行对应调整,使第一红外传感器与第二红外传感器检测不再能检测到织物。
12.优选的,所述机架上滑动连接有滑板,所述滑板沿调整辊轴向滑动,所述滑板朝向调整辊的一侧设置有至少两根支撑杆,所述调整辊的两端均转动连接于支撑杆;所述驱动器包括电缸,所述电缸的活塞杆固定连接于机架,且电缸的缸体固定连接于滑板。
13.通过采用上述技术方案,使用滑板来进行滑动调整,同时将调整辊转动设置,使得调整辊能够在调整的同时与织物转动接触,从而降低对织物运输过程中的摩擦干扰。
14.优选的,所述控制电路包括:
15.检测电路,耦接于第一红外传感器、第二红外传感器,并发出检测信号;
16.比较电路,耦接于检测电路的输出端以接收检测信号并输出比较信号;
17.执行电路,耦接于比较电路并根据比较信号控制驱动器是否得电。
18.通过采用上述技术方案,使得第一红外传感器能够对织物的一侧进行检测,第二红外传感器对织物的另一侧进行检测,当织物的偏斜量达到第一红外传感器或者红外传感器的检测点时,驱动器启动,驱动调整辊进行调整。
19.通过采用上述技术方案,
20.优选的,所述比较电路,包括,
21.第一比较部,耦接于检测电路以接收检测信号,并将检测信号与第一预设值进行比较后输出第一控制信号;
22.第二比较部,耦接于检测电路以接收检测信号,并将检测信号与第二预设值进行比较后输出第二控制信号。
23.第一预设值为第一红外传感器检测不到布料时的信号;
24.第二预设值为第二红外传感器检测不到布料时的信号;
25.比较电路将第一红外传感器与第一预设值、第二红外传感器与第二预设值进行对比,当感应信号大于第一预设值时,织物朝向第一红外传感器所在位置偏斜,发出第一控制信号,当感应信号大于第二预设值时,说明织物朝向第二红外传感器所在位置偏斜,发出第二控制信号。
26.通过采用上述技术方案,
27.优选的,所述执行电路包括,
28.第一驱动部,耦接于第一比较部以接收第一控制信号,当第一红外传感器的感应信号大于第一预设值时,第一驱动部控制驱动器使调整辊朝向远离第一红外传感器的方向滑动;
29.第二驱动部,耦接于第二比较部以接收第二控制信号,当第二红外传感器的感应信号大于第二预设值后,第二驱动部控制驱动器使调整辊朝向远离第二红外传感器的方向滑动。
30.通过采用上述技术方案,当第一红外传感器的感应信号大于第一预设值时、第二红外传感器的感应信号大于第二预设值时,驱动器均开始对应工作,对织物的位置进行调整。
31.通过采用上述技术方案,
32.优选的,所述第一驱动部包括:
33.第五电阻,一端耦接于第一比较部;
34.第一三极管,发射极接地,基极耦接于第五电阻的另一端;
35.第六电阻,一端耦接于第五电阻与第一三极管基极的连接点,另一端耦接于第一三极管与地的连接点;
36.第九电阻,一端耦接于直流电,另一端耦接于第一三极管的集电极;
37.第一继电器,包括线圈、第一常开触点开关,线圈一端耦接于第九电阻与直流电的连接点,线圈的另一端耦接于第九电阻与第一三极管的连接点,第一常开触点开关与驱动器耦接。
38.通过采用上述技术方案,第一控制信号将第一继电器导通,从而使第一常开触点开关闭合,进而使得驱动器得电,驱动调整辊朝向远离第一红外传感器的方向进行运动。
39.本实用新型进一步设置为:所述第二驱动部包括,
40.第七电阻,耦接于第二比较部;
41.第二三极管,基极耦接于第七电阻,发射极接地;
42.第八电阻,一端耦接于第七电阻与第二三极管基极的连接点,另一端耦接于第二三极管与地的连接点;
43.第二继电器,包括第二常开触点开关、线圈,线圈的一端耦接于直流电,线圈的另一端耦接于第二三极管的集电极,第二常开触点开关与驱动器耦接。
44.通过采用上述技术方案,输出的第二控制信号将第二三极管导通,使第二继电器工作,从而使第二常开笔电开关闭合,进而使得驱动器得电,驱动调整辊朝向远离第二红外传感器的方向进行运动。
45.综上所述,本技术包括以下至少一种有益技术效果:
46.1.检测器实时对织物位置进行检测,防止织物出现偏斜,并且通过调整辊与织物之间的摩擦力来带动织物运动,实现对织物位置的调整;
47.2.使用滑板来进行滑动调整,同时将调整辊转动设置,使得调整辊能够在调整的同时与织物转动接触,从而降低对织物运输过程中的摩擦干扰。
附图说明
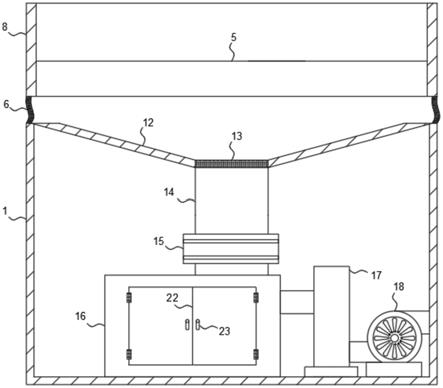
48.图1是本技术的结构示意图。
49.图2是本技术的控制电路的电路示意图。
50.附图标记说明:1、机架;2、喷气织机本体;3、收卷辊;4、调整辊;5、检测器;51、第一红外传感器;52、第二红外传感器;6、驱动器;7、滑板;8、支撑杆;1000、控制电路;100、检测电路;200、比较电路;201、第一比较部;202、第二比较部;300、执行电路;301、第一驱动部;302、第二驱动部;r1、第一电阻;r2、第二电阻;r3、第三电阻;r4、第四电阻;r5、第五电阻;r6、第六电阻;r7、第七电阻;r8、第八电阻;r9、第九电阻;a、第一比较器;b、第二比较器;q1、第一三极管;q2、第二三极管;km1、第一继电器;km1
‑
1、第一常开触点开关;km2、第二继电器;km2
‑
1、第二常开触点开关。
具体实施方式
51.以下结合附图1
‑
2对本技术作进一步详细说明。
52.本技术实施例公开一种喷气织机。
53.实施例1
54.参照图1,喷气织机包括机架1、连接于机架1的喷气织机本体2、连接于机架1的收卷辊3、驱动收卷辊3转动的驱动电机,在喷气织机本体2将织物生产后,收卷辊3在驱动电机的驱动下对织物进行牵引与收卷。
55.在收卷辊3收卷的过程中,通过检测器5对织物的位置进行检测,并通过调整辊4对织物的位置进行调整。检测器5使用红外传感器,具体包括设于织物进料方向一侧的第一红外传感器51、设于织物进料方向另一侧的第二红外传感器52,第一红外传感器51的检测点与第二红外传感器52的检测点均与织物的边缘间隙配合。调整辊4与收卷辊3的轴线呈平行设置,织物进入调整辊4收卷前首先绕过收卷辊3,调整辊4的外表面呈粗糙设置,从而形成摩擦面,用于能够增大调整辊4与织物之间的摩擦力。
56.机架1上沿收卷辊3的轴线方向开设有滑槽,滑槽处滑动连接有滑板7,滑板7沿滑槽滑动。在滑板7上固定连接有两根支撑杆8,调整辊4的一端转动连接于一根支撑杆8,另一端转动连接于另一支撑杆8,且调整辊4与支撑杆8的连接处设置有轴承。在织物与调整辊4之间发生摩擦时,调整辊4能够进行转动,从而降低对织物的磨损。
57.在机架1上还设置驱动器、根据检测器5的检测信号控制驱动器6工作的控制电路1000。驱动器6使用电缸,电缸的活塞杆固定连接于机架1,且电缸的缸体部分固定连接于滑板7,从而能够通过电缸的活塞运动来驱动滑板7相对机架1滑动,进而实现调整辊4相对机架1滑动。
58.实施例1的实施原理为:在织物偏斜需要进行纠偏时,驱动器6启动,从而驱动滑板7、调整辊4沿收卷辊3的轴向进行滑动调整,如果织物相对右偏,就驱动调整辊4向左滑动;如果织物相对左偏,就由调整辊4向右滑动,保证织物能够整齐的缠绕在收卷辊3上。
59.实施例2
60.实施例二:一种喷气织机,如图1、图2所示,与实施例一的不同点在于:控制电路1000包括用于检测织物偏斜程度并输出检测信号的检测电路100、耦接于检测电路100的比较电路200、耦接于比较电路200的执行电路300。
61.检测电路100耦接于第一红外传感器51、第二红外传感器52,接收第一红外传感器51、第二红外传感器52的传感信号,从织物的左右两个方向对织物的偏斜程度进行检测,并发出检测信号。
62.比较电路200包括第一比较部201、第二比较部202。
63.第一比较部201包括第一电阻r1、第二电阻r2、第一比较器a,第一电阻r1一端耦接于直流电,第一电阻r1另一端耦接于第二电阻r2一端,第二电阻r2另一端接地,第一比较器a反相端耦接于第一电阻r1与第二电阻r2的连接点以接收第一预设值,第一预设值为第一红外传感器51检测不到布料时的信号;第一比较器a正相端耦接于第一红外传感器51以接收检测信号。
64.第二比较部202包括第三电阻r3、第四电阻r4、第二比较器b,第三电阻r3一端耦接于直流电,第三电阻r3另一端耦接于第四电阻r4一端,第四电阻r4另一端接地,第二比较器b反相端耦接于第三电阻r3与第四电阻r4的连接点以接收第二预设值,第二预设值为第二红外传感器52检测不到布料时的信号;第二比较器b正相端耦接于第二红外传感器52以接收检测信号。
65.执行电路300包括第一驱动部301、第二驱动部302。
66.第一驱动部301包括第五电阻r5、第六电阻r6、第一三极管q1、第九电阻r9、第一继电器km1,第五电阻r5的一端耦接于第一比较器a输出端,第五电阻r5的另一端耦接于第一三极管q1基极;第一三极管q1的集电极耦接于第二继电器km2,第一三极管q1的发射极接
地。
67.第六电阻r6一端耦接于第五电阻r5与第一三极管q1基极的连接点,第六电阻r6另一端耦接于第一三极管q1与地的连接点。
68.第九电阻r9,一端耦接于直流电,另一端耦接于第一三极管q1的集电极。
69.第一继电器km1,包括线圈、第一常开触点开关km1
‑
1,线圈一端耦接于第九电阻r9与直流电的连接点,线圈的另一端耦接于第九电阻r9与第一三极管q1的连接点,第一常开触点开关km1
‑
1与驱动器6耦接,用于控制驱动器6朝向远离第一红外传感器51的方向驱动。
70.第二驱动部302包括第七电阻r7、第八电阻r8、第二三极管q2、第二继电器km2、续流二极管,第七电阻r7一端耦接于一端耦接于第二比较器b输出端,第七电阻r7另一端耦接于第二三极管q2基极;第二三极管q2的集电极耦接于第二继电器km2,第二三极管q2的发射极接地。
71.第八电阻r8一端耦接于第七电阻r7与第二三极管q2基极的连接点,另一端耦接于第二三极管q2与地的连接点;第二继电器km2耦接于直流电,第二继电器km2包括耦接于驱动器6的第二常开触点开关km2
‑
1,用于控制驱动器6朝向远离第二红外传感器52的方向驱动;续流二极管一端耦接于第二继电器km2与第二三极管q2集电极的连接点,续流二极管另一端耦接于第二继电器km2与地的连接点。
72.工作过程:通过第一红外传感器51检测织物的一个方向的偏斜,通过第二红外传感器52检测织物的另一个方向的偏斜;
73.当织物朝向第一红外传感器51偏斜时,通过对第一红外传感器51的信号处理,在第一比较部201发射第一控制信号,第一继电器km1将第一常开触点开关km1
‑
1闭合,从而使直流电、第一常开触点开关km1
‑
1、驱动器6电连,最后接地,使得驱动器6电动调整辊4朝向远离第一红外传感器51的方向工作;
74.当织物朝向第二红外传感器52偏斜时,第二比较部202发射第二控制信号,使得第二继电器km2启动,从而使第二常开触点开关km2
‑
1闭合,从而使直流电、驱动器6、第二常开触点开关km2
‑
1电连,最后接地,使得驱动器6电动调整辊4朝向远离第二红外传感器52的方向工作。
75.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。