1.本发明涉及手套机的技术领域,特别是一种自动识别及整理的手套编织机。
背景技术:
2.普通手套编织机一般存在编织手套整理效率低的技术问题,授权公告号为cn208362618u的中国专利公开了一种手套编织机及其成品收纳装置,包括手套编织机的机壳以及机壳上的出料口,还包括位于出料口处的收纳筐,机壳上开设有卡槽,收纳筐上连接有挂钩,挂钩远离收纳筐的一端卡接在卡槽内。
3.上述专利虽然在手套编织机的出料口处设置了收纳筐,但编织完的手套在进入收纳筐时是杂乱无章的,而且在收集手套时仍需要人工一只一只地整理成叠,整理手套的效率也不高,同时其不具备质量识别功能,需凭肉眼检查成品质量,极为繁琐和不便。
技术实现要素:
4.本发明的目的就是解决现有技术中的问题,提出一种自动识别及整理的手套编织机,以提高编织手套收集和整理效率,并能对编织手套质量好坏进行自动识别,提高手套编织机的自动化程度。
5.为实现上述目的,本发明提出了一种自动识别及整理的手套编织机,包括机架、设置于机架的一对边侧板、设置于该对边侧板之间的针板和设置于针板上部并受直驱机构驱动的机头,所述机架上设有叉刀传动机构、顶杆传动机构和剪刀传动机构,还包括:
6.手套自动叠放装置,其设置于机架的底部前侧;
7.自动接放手套驱动装置,设于机架内且处于针板的下方,能够逐个将编织完成的编织手套负压吸合并翻转传递至手套自动叠放装置放落;
8.以及自动识别装置,其包括朝向所述自动接放手套驱动装置和手套自动叠放装置的摄像头组件及设置于机架上的终端显示,所述摄像头组件通过对自动接放手套驱动装置中负压吸合和手套自动叠放装置中放落的编织手套正、反面摄像,并把图像传送给终端显示进行编织质量的判别。
9.作为优选,所述自动接放手套驱动装置包括接放手套机构和驱动其往复升降的垂直驱动机构,所述接放手套机构包括吸盘固定板及轴承座,吸盘固定板开设有用于设置感应编织手套的感应位的通槽以及至少两个用于设置吸合编织手套的吸合位的轴孔,所述吸盘固定板受驱呈摆动安装在所述轴承座上,所述轴承座与垂直驱动机构连接,所述吸盘固定板受驱能够由针板下方朝向手套自动叠放装置摆动。
10.作为优选,所述手套自动叠放装置包括开设有栅格槽并供所述自动接放手套驱动装置放置编织手套的手套接板和具有若干层手套叠放位的叠放手套装置,所述手套叠放位由若干间隔排列成排且一端悬置在叠放手套装置上的叠放杆组成,所述叠放杆的位置与栅格槽对应,所述手套接板与左右驱动装置连接,所述左右驱动装置能够驱动手套接板经栅格槽横向滑入所述手套叠放位内,所述左右驱动装置设于驱动其往复升降的上下驱动装置
上,所述上下驱动装置能够驱动所述手套接板沿竖直方向从所述手套叠放位中移出。
11.作为优选,所述接放手套机构还包括连接块和转动轴,所述吸盘固定板设置在连接块上,所述连接块经所述转动轴与所述轴承座摆动连接,所述上电机与转动轴经蜗轮和蜗杆啮合呈传动连接,所述上电机能够驱动所述连接块相对轴承座摆动90度。
12.作为优选,所述连接块上设有沿其长度方向分布的气缸,所述气缸的伸缩杆与吸盘固定板连接,所述气缸能够驱动所述吸盘固定板在连接块上伸缩。
13.作为优选,所述连接块末端固设有转动块,所述转动轴与转动块固接且与轴承座转动连接,所述转动轴与蜗轮固接,上电机底板设置于轴承座的边侧,上电机的驱动轴经上电机底板后与蜗杆连接,所述蜗轮与蜗杆啮合。
14.作为优选,所述垂直驱动机构包括下电机以及呈竖直设置且受下电机驱动的丝杆传动组件,所述接放手套机构安装在所述丝杆传动组件上,所述丝杆传动组件能够带动接放手套机构往复升降。
15.作为优选,所述丝杆传动组件包括安装在滑座上的丝杆及丝杆螺母,所述接放手套机构经丝杆螺母与所述丝杆螺合且呈竖直状滑动安装在所述滑座上,所述下电机固定在滑座中并与所述丝杆驱动连接,所述下电机能够驱动所述丝杆旋转,以使所述接放手套机构在滑座上往复升降。
16.作为优选,所述手套叠放位呈对称状悬置在所述叠放手套装置内,所述叠放手套装置中位于手套叠放位中间形成换层通道,所述手套接板位于所述换层通道中,所述左右驱动装置能够驱动所述手套接板向两侧的手套叠放位横向移动,上下驱动装置能够驱动手套接板在换层通道中往复升降。
17.作为优选,所述左右驱动装置包括与上下驱动装置连接且设有滑轨的底板和设置在底板上并由电机驱动能够发生正反转的同步带二,所述底板沿叠放手套装置横向分布,所述手套接板与支承支架固接,所述底板中的滑轨内设有滑轨滑块,所述支承支架与所述同步带二经滑轨滑块、同步带压块和连接板固接,旋转所述同步带二能够驱动所述支承支架在底板上往复横移。
18.作为优选,所述上下驱动装置包括固定在叠放手套装置上且沿竖直方向分布的同步带电动滑台及连接角铁,所述连接角铁设置于同步带电动滑台的滑块上,所述左右驱动装置连接在连接角铁上。
19.本发明的有益效果:
20.1、利用自动接放手套驱动装置将编织完成的编织手套逐个传递至手套自动叠放装置放落,并使其叠合放置,完成对编织手套自动化的整理,提高编织手套收集和整理效率,同时通过自动识别装置在编织手套吸放过程中对正、反面的摄像并把图像传送给终端显示,使得手套编织机能够对编织手套进行编织质量的自动识别,提高了手套编织机的自动化程度。
21.2、在接放手套机构中采用感应位及吸合位与吸盘固定板相配合的结构,使得编织手套在刚要下落时被感应位近距离检测,并被吸合位负压吸合,提高对编织手套收集和整理的动作精度;
22.3、通过在手套接板中开设了栅格槽,在输送手套过程中,栅格槽能与手套叠放位的叠放杆相对应,便于手套接板进入到手套叠放位中,从而在手套叠放位上放置编织手套,
并完成退出,实现成叠编织手套的自动化放置,避免人工搬运。
23.本发明的特征及优点将通过实施例结合附图进行详细说明。
附图说明
24.图1是本发明的立体示意图;
25.图2是本发明中自动接放手套驱动装置的结构示意图;
26.图3是本发明中自动接放手套驱动装置的爆炸图;
27.图4是本发明中垂直驱动机构驱动接放手套机构上升接手套的示意图;
28.图5是本发明中垂直驱动机构驱动接放手套机构下降的示意图;
29.图6是本发明中蜗轮、蜗杆带动吸盘固定板及编织手套摆动后的示意图;
30.图7是本发明中气缸伸开进行放置编织手套示意图;
31.图8是本发明中手套自动叠放装置的立体装配图;
32.图9是本发明中手套自动叠放装置的爆炸图;
33.图10是本发明中手套自动叠放装置整理编织手套的工作状态图;
34.图中:1、机架;2、右边侧板;3、左边侧板;4、针板;5、前机头;6、后机头;7、自动接放手套驱动装置;8、手套自动叠放装置;9、剪刀传动机构;10、顶杆传动机构;11、直驱机构;12、前小护板;13、摄像头一;14、摄像头二;15、终端显示;16、右罩壳;17、叉刀传动机构;18、自动识别装置;30、编织手套;
35.71、轴承座左侧板;72、转动块;73、转动轴;74、蜗杆;75、轴承座右侧板;76、右轴承;77、下电机底板;78、丝杆同步轮;79、同步带一;710、电机同步轮;711、转接板;712、下电机;713、轴承座底板;714、丝杆传动组件;714a、丝杆螺母;714b、丝杆;715、上电机底板;716、上电机;717、连接块;718、梯形螺母一;719、吸盘固定板;719a、上轴孔;719b、通槽;719c、中轴孔;719d、下轴孔;720、真空吸盘一;721、感应开关;722、真空吸盘二;723、真空吸盘三;724、垫块一;725、蜗轮;726、左轴承;727、垫块二;728、梯形螺母二;729、气缸;731、轴承座;735、接放手套机构;736、垂直驱动机构;
36.81、手套接板;82、滑轨一;83、支承支架;84、后侧板;85、同步带电动滑台;85a、同步带电动滑台的滑块;86、连接角铁;87、底板;88、圆轴;89、滑轨二;810、同步带压块;811、电机座;812、同步轮一;813、电机;814、右侧板;815、底座;816、同步带二;817、左侧板;818、下轴承;819、同步轮二;820、同步轮支架;821、上轴承;822、小轴;823、连接板;825、叠放手套装置;826、左右驱动装置;827、上下驱动装置;828、手套叠放位。
具体实施方式
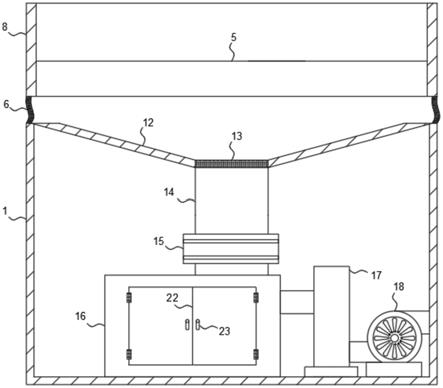
37.参阅图1至图10,本发明包括机架1、设置于机架1的左边侧板3及右边侧板2、设置于该对边侧板之间的针板4和设置于针板4上部并受直驱机构11驱动的前机头5及后机头6,设置于边侧板前侧的前小护板12,设置于右边侧板2右侧的右罩壳16、叉刀传动机构17,主体设置于左边侧板3左侧的顶杆传动机构10及剪刀传动机构9;实施例中的机架1、左边侧板3、右边侧板2、针板4、前机头5、后机头6、叉刀传动机构17、顶杆传动机构10、剪刀传动机构9及各个机构间的连接关系均为现有技术,具体可参照专利号为zl201920889868.x《一种电脑编织手套机》的实用新型专利,同时本发明还包括自动接放手套驱动装置7、自动识别装
置18及手套自动叠放装置8:
38.其中手套自动叠放装置8,其设置于机架1的底部前侧;用于接收从自动接放手套驱动装置7释放的编织手套30;
39.自动接放手套驱动装置7,设于机架1内且处于针板4的下方,能够逐个将编织完成的呈竖直状的编织手套负压吸合并翻转90度传递至手套自动叠放装置8呈水平放落,以便进行编织手套30的有序整理,使得手套自动叠放装置8上编织手套30呈叠放置;
40.以及自动识别装置18,其包括摄像头组件及设置于机架1上的终端显示15,摄像头组件为摄像头一13及摄像头二14,摄像头一13设置于前小护板12的外侧朝向手套自动叠放装置8,摄像头二14设置于前小护板12的底部朝向所述自动接放手套驱动装置7,同时摄像头二14对自动接放手套驱动装置7中被负压吸合的编织手套30的一面进行摄像,摄像头一13对在手套自动叠放装置8中放落的编织手套30另一面摄像,由此完成对编织手套30的正、反面摄像,并把图像传送给终端显示15进行编织质量的判别。其中终端显示15具有控制器,其内预存有正、反面图像,利用控制器对接收的正、反面图像与预存图像比对,并在终端显示15给出判别结果。
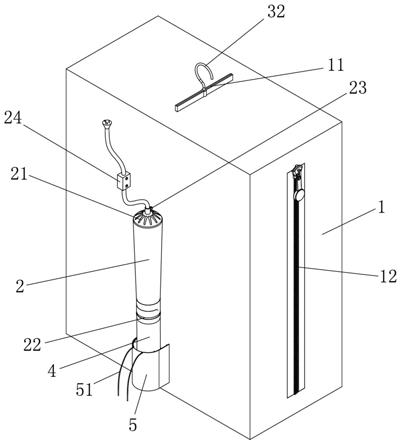
41.具体的,所述自动接放手套驱动装置7包括接放手套机构735和驱动其往复升降的垂直驱动机构736,所述接放手套机构735包括吸盘固定板719及轴承座731,吸盘固定板719开设有用于设置感应编织手套30的感应位的通槽以及至少两个用于设置吸合编织手套30的吸合位的轴孔,所述吸合位为用于吸放编织手套30的真空吸盘,分别为真空吸盘一720、真空吸盘二722及真空吸盘三723,所述感应为感应开关721。感应开关721可以为光电式接近开关、电感式接近开关、霍尔接近开关等,本实施例中采用电感式接近开关,其与真空吸盘一720、真空吸盘二722及真空吸盘三723受主控制器协同控制,使得编织手套30在刚要下落时被感应开关721近距离检测,并被真空吸盘负压吸合,其中所述吸盘固定板719受驱呈摆动安装在所述轴承座731上,所述轴承座731与垂直驱动机构736连接,所述吸盘固定板719受驱能够由针板4下方朝向手套自动叠放装置8摆动。垂直驱动机构736能够驱动吸盘固定板719上升接编织手套30或下降放置编织手套30,同时配合吸盘固定板719相对轴承座731的摆动运动,将编织手套30传递至手套自动叠放装置8放落。本实施例中,轴承座731包括轴承座底板713、轴承座左侧板71及轴承座右侧板75。
42.本实施例中,吸盘固定板719的轴孔包括上轴孔719a、中轴孔719c及下轴孔719d,真空吸盘一720、真空吸盘二722及真空吸盘三723分别设置于吸盘固定板719的上轴孔719a、中轴孔719c及下轴孔719d,感应开关721设置于吸盘固定板719的通槽719b。
43.为了实现将叠合在一起编织手套30自动放置,以提高自动化程度,所述手套自动叠放装置8包括开设有栅格槽并供所述吸盘固定板719放置编织手套30的手套接板81和具有若干层手套叠放位828的叠放手套装置825,所述手套叠放位828由若干间隔排列成排且一端悬置在叠放手套装置825上的叠放杆组成,本实施例中的叠放杆为圆轴88,所述圆轴88的位置与栅格槽对应,同时栅格槽的深度以及宽度均大于圆轴88的直径;其中圆轴88也可以由间隔排列的板状物代替。
44.所述手套接板81与左右驱动装置826连接,所述左右驱动装置826能够驱动手套接板81经栅格槽横向滑入所述手套叠放位828内,所述左右驱动装置826设于驱动其往复升降的上下驱动装置827上,利用往复的升降运动,能够使得手套接板81升降至不同高度,以对
应各层的手套叠放位828,同时所述上下驱动装置827能够驱动所述手套接板81沿竖直方向从所述手套叠放位828中移出,从而使得叠放在手套接板81上的编织手套30,由手套叠放位828承托,完成把叠放于手套接板81的编织手套30输送至叠放手套装置825的手套叠放位828动作。
45.手套叠放位828呈对称状悬置在所述叠放手套装置825内,所述叠放手套装置825中位于手套叠放位828中间形成换层通道,所述手套接板81位于所述换层通道中,所述左右驱动装置826能够驱动所述手套接板81向两侧的手套叠放位828横向移动,上下驱动装置827能够驱动手套接板81在换层通道中往复升降,以对应各层的手套叠放位828。
46.所述左右驱动装置826包括与上下驱动装置827连接且设有滑轨的底板87和设置在底板87上并由电机813驱动能够发生正反转的同步带二816,所述底板87沿叠放手套装置825横向分布,所述手套接板81与支承支架83固接,所述设于底板87的滑轨设有滑块,所述支承支架83与所述同步带二816经滑轨滑块、同步带压块810和连拉板823固接,旋转所述同步带二816能够驱动所述支承支架83在底板87上往复横移。
47.其中,所述上下驱动装置827包括固定在叠放手套装置825上且沿竖直方向分布的同步带电动滑台85及连接角铁86,所述连接角铁86设置于同步带电动滑台的滑块85a上,所述左右驱动装置826连接在连接角铁86上,叠放手套装置825包括底座815、左侧板817、右侧板814及手套叠放位828,底座815分别与左侧板817、右侧板814及后侧板84结合,本实施例中,手套叠放位828包括6组,每组手套叠放位828由十数根圆轴88构成,手套叠放位828设置于左侧板817的右侧3组及右侧板814的左侧3组且相互对应,同步带电动滑台85设置于后侧板84。
48.自动接放手套驱动装置7中接放手套机构735还包括转动块72、连接块717、蜗轮725及蜗杆74等,连接块717固设于转动块72,转动轴73与转动块72固接且与轴承座731转动连接,转动轴73的左侧端与蜗轮725连接,上电机底板715设置于轴承座731的边侧,上电机716的驱动轴经上电机底板715后与蜗杆74连接,蜗轮725与蜗杆74啮合,所述上电机716能够驱动所述连接块717相对轴承座731摆动90度。
49.具体的,所述连接块717上设有沿其长度方向分布的气缸729,所述气缸729的伸缩杆与吸盘固定板719连接,吸盘固定板719设置于气缸729的伸缩位,所述气缸729能够驱动所述吸盘固定板719在连接块717上伸缩。梯形螺母设置于连接块717的梯形槽,垫块设置于气缸729与连接块717之间,气缸729与梯形螺母连接,梯形螺母包括梯形螺母一718及梯形螺母二728,垫块包括垫块一724及垫块二727。
50.本实施例中,垂直驱动装置736包括丝杆传动组件714、下电机底板77、丝杆同步轮78、电机同步轮710及同步带一79等,所述接放手套机构735安装在所述丝杆传动组件714上,所述丝杆传动组件714能够带动接放手套机构735往复升降。
51.具体的,丝杆传动组件714包括固定在滑座上的丝杆714b及丝杆螺母714a,所述下电机712与所述丝杆714b驱动连接,轴承座731固设于丝杆传动组件714的丝杆螺母714a,丝杆同步轮78与丝杆传动组件714的丝杆714b结合,下电机712的驱动轴经转接板711、下电机底板77后与电机同步轮710结合,同步带一79设置于丝杆同步轮78与电机同步轮710之间,所述下电机712能够驱动所述丝杆714b旋转,以使所述接放手套机构735往复升降。
52.本实施例的工作原理:手套编织机通过直驱机构11带动前机头5及后机头6左右往
复运动,同时也带动设置于针板4针槽的织针运动,并与顶杆传动机构10、选针机构等配合参加编织,手套编织机先完成编织手套30的指部及掌部编织,当需分叉时,叉刀传动机构17及剪刀传动机构9配合动作,随后进行罗口部编织,当编织手套30快要落下时,如图4所示,垂直驱动机构736的下电机712的驱动轴转动,带动电机同步轮710、同步带一79及丝杆同步轮78同步转动,由于丝杆同步轮78与丝杆传动组件714的丝杆714b固接,丝杆714b也驱动丝杆螺母714a及接放手套机构735垂直向上运动,接着气缸729的伸缩位向上运动,带动吸盘固定板719、真空吸盘一720、感应开关721、真空吸盘二722、真空吸盘三723同步运动,接着,真空吸盘一720、感应开关721、真空吸盘二722、真空吸盘三723与编织手套30相对应,先感应开关721检测编织手套30的掌部,并发出一个检测信号,如编织手套30被检测存在,真空吸盘一720、真空吸盘二722、真空吸盘三723进行负压吸合编织手套30;如图5所示及图1所示,当接放手套机构735吸合编织手套30后,气缸729的伸缩位回退,接着下电机712的驱动轴反转,带动电机同步轮710、同步带一79及丝杆同步轮78同步转动,丝杆传动组件的丝杆714b也驱动丝杆螺母714a及接放手套机构735垂直向下运动,直至预设位置,同时摄像头二14对被负压吸合的编织手套30的一面进行摄像并把图像传送给终端显示15;如图6所示,上电机716的驱动轴转动,带动蜗杆74、蜗轮725及转动轴73同步转动,由于转动块72与转动轴73固接,也带动连接块717、垫块一724、垫块二727、气缸729、吸盘固定板719、真空吸盘一720、感应开关721、真空吸盘二722、真空吸盘三723及编织手套30转动,直至设定位置;如图7所示,气缸729的伸缩位向前伸开,吸盘固定板719、真空吸盘一720、感应开关721、真空吸盘二722、真空吸盘三723及编织手套作同步运动,真空吸盘一720、真空吸盘二722、真空吸盘三723进行通气放置编织手套。如图10及图1所示,当每一只编织手套30被放置于手套接板81上后,摄像头一13对编织手套30的另一面进行摄像并把图像传送给终端显示15,终端显示15对编织手套30的正、反两面的图像进行编织质量判别,如编织质量属于正品,则手套编织机继续正常生产,如编织质量属于次品,手套编织机自动停机,需对设备的相关零件进行检修;当手套接板81上的编织手套30的数量积累到24只时,左右驱动装置及上下驱动装置配合动作,手套接板81接近左侧板817右侧或右侧板814左侧的手套叠放位828时,手套叠放位828的圆轴位置低于手套接板81的上平面,接着,在向左或向右的移动过程中,手套叠放位828的圆轴进入手套接板81的栅格槽,直至完全处于编织手套30的正下方,再接着上下驱动装置向下运动,使得编织手套30放置于手套叠放位828,随后,左右驱动装置与上下驱动装置配合动作,使得手套接板81返回接手套位置;接着重复上述动作,直到叠放手套装置825的6个手套叠放位828放满编织手套30。
53.上述实施例是对本发明的说明,不是对本发明的限定,任何对本发明简单变换后的方案均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。