技术特征:
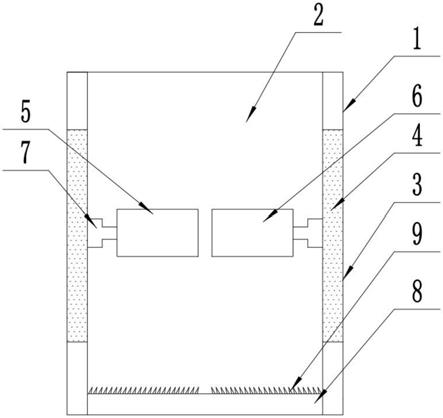
1.一种基于双目视觉的汽车座椅姿态智能控制方法,其特征在于:包括以下步骤:s1、将汽车双目摄像机沿着汽车侧向安装在汽车车顶的合适位置,并对双目摄像机进行参数标定,获得双目摄像机的基线距离b,并测量双目摄像机光心到地面的垂直高度h
c
;s2、当人员进入合适的距离范围内后,通过双目摄像机采集人员向汽车移动的视频信号;s3、通过双目视觉成像原理计算人体身高h
human
;s4、通过身高估计人体其他部位主要静态人体尺寸参数;s5、根据人机工程学原理,确定该人体尺寸数据对应的最佳座椅舒适位置,获得座椅水平位置、高度和靠背倾角信息;s6、将座椅参数输入给自动调控系统,电机装置带动座椅调整位置,实现座椅的水平位置、高度和靠背倾角自动调节。2.根据权利要求1所述的一种基于双目视觉的汽车座椅姿态智能控制方法,其特征在于,所述的自动调控系统包括双目摄像机、身高检测算法模块和电机装置,所述电机装置由电机装置a、电机装置b和电机装置c组成;所述的双目摄像机固定在汽车的车顶,并且双目摄像机的正方向朝向汽车车门侧向布置,并将采集的视频信号通过数据线将视频传送到身高检测算法模块;所述的电机装置a接收来自身高检测算法模块得到的座椅前后位置调节信号,进行座椅前后位置的调节;所述的电机装置b接收来自身高检测算法模块得到的座椅高度位置调节信号,进行座椅高度位置的调节;所述的电机装置c接收来自身高检测算法模块得到的座椅靠背位置调节信号,进行座椅靠背倾角的调节。3.根据权利要求1所述的一种基于双目视觉的汽车座椅姿态智能控制方法,其特征在于,所述的步骤s2中双目视觉精确感知范围在1~8米之间。4.根据权利要求1所述的一种基于双目视觉的汽车座椅姿态智能控制方法,其特征在于,所述的步骤s3中,通过双目视觉成像原理计算人体身高的公式如下:其中,h
human
是需要获得的人体身高,y
top
是人体最高点在左相机像素坐标系下的纵轴坐标,c
y
是左相机光轴在左相机像素坐标系下的纵轴坐标;b是基线距离,d是最高点对应的左右相机视差。5.根据权利要求1所述的一种基于双目视觉的汽车座椅姿态智能控制方法,其特征在于,所述s4利用双目视觉实现人体身高测量的方法具体步骤为:s401:通过matlab相机标定模块对双目摄像机进行标定,并得到相机光轴参考点在像素坐标系下的坐标(c
x
,c
y
),以及双目摄像机的基线距离t
x
;s402:利用高斯混合模型算法分割视频中的运动前景,并利用开运算和闭运算方法对获得的运动前景进行去噪处理,从而获得人体前景区域最高点像素点的y坐标,y
top
;s403:对视频的关键帧进行特征点匹配,利用orb特征点检测算法和暴力比配算法匹配算法,计算最高点在左右相机里的视差d,
d=x
l
‑
x
r
;x
l
是左摄像机最高点特征点;x
r
是右摄像机最高点特征点;s404:根据视差和相应的公式计算人体身高。6.根据权利要求1所述的一种基于双目视觉的汽车座椅姿态智能控制方法,其特征在于,所述步骤s4中通过身高估计人体其他部位主要静态人体尺寸参数的主要方法是根据gb10000-88《中国成年人人体尺寸》中人体其他部位尺寸和身高之间的线性关系估计出人体其他对座椅位置调节产生重要影响的人体尺寸、关节主要尺寸,包括但不限于肩宽、臂长、大腿长、小腿长、足长。
技术总结
本发明涉及一种基于双目视觉的汽车座椅姿态智能控制方法,步骤如下:S1、将汽车双目摄像机沿着汽车侧向安装在汽车车顶的合适位置,并对双目摄像机进行参数标定,获得双目摄像机的基线距离B,并测量双目摄像机光心到地面的垂直高度H
技术研发人员:张立军 孟德建 刘子豪 李文博
受保护的技术使用者:南昌智能新能源汽车研究院
技术研发日:2021.05.28
技术公布日:2021/10/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。