1.本发明涉及相机,尤其涉及一种相机盖板的清洁度检测方法及检测装置。
背景技术:
2.飞行时间相机(time of flight,tof)是新一代距离检测及3d成像技术产品。是通过给目标连续发送光脉冲,然后用成像传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。tof相机在工作过程中,其盖板玻璃(cover glass,简称cg)表面会逐渐积累灰尘,会造成测距不准的情况。因此,需要检测盖板表面是否存在灰尘,判断其脏污状态。
3.公开号为cn 111970506 b的发明专利公开了及一种镜头脏污检测方法、装置和设备,该方法包括:获取对待检测镜头拍摄得到的镜头图像;结合镜头图像的中心点坐标,将图像划分成两个分区和一个总区域,结合不同区域的灰度值进行分区检测,以及根据总检测区域的灰度值进行综合检测。通过对分区和包含分区的总检测区域均进行相应的脏污检测,将分区检测数据和总区域的检测数据汇总,作为待检测镜头的整体检测结果。通过图像分区检测镜头是否存在脏污,实现对镜头脏污的自动检测,避免人工识别导致的检测误差,且检测更加全面,能够提高镜头脏污检测的可靠性。该发明先计算图像总区域的灰度平均值,根据所述总检测区域的灰度平均值和方差确定基准阈值,分别根据所述第一检测分区和所述第二检测分区的灰度数据,通过动态阈值检测所述第一检测分区和所述第二检测分区是否存在脏污,得到所述第一检测分区和所述第二检测分区的脏污检测结果。但是该发明如何划分第一检测分区和第二检测分区是一个难题,如何设置动态阈值检测又是一个难题,使得该镜头脏污检测方法变得繁琐,检测及判断镜头脏污难度高。
4.因此,有必要提供一种相机盖板的清洁度检测方法及检测装置以解决上述的现有技术中存在的问题。
技术实现要素:
5.本发明的目的在于提供一种相机盖板的清洁度检测方法及检测装置,以解决镜头脏污检测方法繁琐,检测及判断镜头脏污难度高的问题。
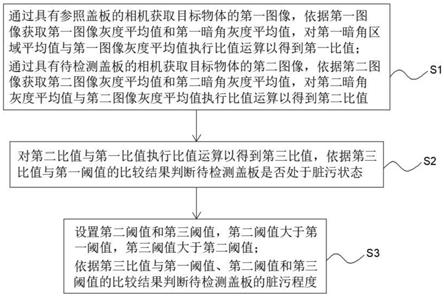
6.为实现上述目的,本发明的所述一种相机盖板的清洁度检测方法,包括步骤:
7.s1:通过具有参照盖板的相机获取目标物体的第一图像,依据所述第一图像获取第一图像灰度平均值和第一暗角灰度平均值,对所述第一暗角灰度平均值与所述第一图像灰度平均值执行比值运算以得到第一比值;
8.通过具有待检测盖板的相机获取所述目标物体的第二图像,依据所述第二图像获取第二图像灰度平均值和第二暗角灰度平均值,对所述第二暗角灰度平均值与所述第二图像灰度平均值执行比值运算以得到第二比值;
9.s2:对所述第二比值与所述第一比值执行比值运算以得到第三比值,依据所述第三比值与第一阈值的比较结果判断所述待检测盖板是否处于脏污状态。
10.本发明的所述相机盖板的清洁度检测方法的有益效果在于:
11.通过具有参照盖板的相机获取第一图像,并从第一图像中获取第一图像灰度平均值和第一暗角灰度平均值,并计算得到第一比值,作为相机盖板的清洁度检测的参考;通过具有待检测盖板的相机获取第二图像,并从第二图像中获取第二图像灰度平均值和第二暗角灰度平均值,并计算得到第二比值,最后依据第二比值与第一比值得到第三比值,并依据第三比值与第一阈值的比较结果,判断待检测盖板是否处于脏污状态。本发明的所述相机盖板的清洁度检测方法对两个图像进行四次灰度平均值的计算,计算的像素点的样本量多,提高了相机盖板的清洁度检测结果的可靠性。通过计算灰度平均值,从而避免了个别异常像素或异常像素区域的灰度值过大或过小造成的检测结果不准确的情况,提高了所述相机盖板的清洁度检测方法的准确性。本发明的所述相机盖板的清洁度检测方法步骤简单且严谨,不需要频繁设置动态阈值,相机盖板的清洁度检测简单。
12.优选地,所述步骤s2中,依据所述第三比值与第一阈值的比较结果判断所述待检测盖板是否处于脏污状态包括步骤:
13.当判断所述第三比值大于或等于所述第一阈值,判定所述待检测盖板处于脏污状态;
14.当判断所述第三比值小于所述第一阈值,判定所述待检测盖板处于清洁状态。
15.进一步优选地,当判定所述待检测盖板处于脏污状态后,还执行步骤s3,所述步骤s3包括:
16.设置第二阈值和第三阈值,所述第二阈值大于所述第一阈值,所述第三阈值大于所述第二阈值;
17.依据所述第三比值与所述第一阈值、所述第二阈值和所述第三阈值的比较结果判断所述待检测盖板的脏污程度。
18.进一步优选地,依据所述第三比值与所述第一阈值、所述第二阈值和所述第三阈值的比较结果判断所述待检测盖板的脏污程度的步骤包括:
19.当判断所述第三比值大于或等于所述第一阈值且小于所述第二阈值时,判定所述待检测盖板的脏污程度为轻脏;
20.当判断所述第三比值大于或等于所述第二阈值且小于所述第三阈值时,判定所述待检测盖板的脏污程度为中脏;
21.当判断所述第三比值大于或等于所述第三阈值,判定所述待检测盖板的脏污程度为重脏。其有益效果在于,判定待检测盖板处于脏污状态后,进一步判断待检测盖板的脏污程度,以提高相机盖板的清洁度检测的精确度。
22.优选地,所述步骤s1中,依据所述第一图像获取第一图像灰度平均值和第一暗角灰度平均值的步骤包括:
23.计算所述第一图像内像素点数以得到第一像素点数,并计算所述第一图像内所有像素的灰度值总和以得到第一灰度值总和,对所述第一灰度值总和与所述第一像素点数执行除运算以得到第一图像灰度平均值;
24.在所述第一图像中确定第一暗角区域,计算所述第一暗角区域内的像素点数以得到第二像素点数,并计算所述第一暗角区域的所有像素的灰度值总和以得到第二灰度值总和,对所述第二灰度值总和与所述第二像素点数执行除运算以得到所述第一暗角灰度平均
值。
25.优选地,所述步骤s1中,依据所述第二图像获取第二图像灰度平均值和第二暗角灰度平均值的步骤包括:
26.计算所述第二图像内像素点数以得到第三像素点数,并计算所述第二图像内所有像素的灰度值总和以得到第三灰度值总和,对所述第三灰度值总和与所述第三像素点数执行除运算以得到第二图像灰度平均值;
27.在所述第二图像中确定第二暗角区域,计算所述第二暗角区域内的像素点数以得到第四像素点数,并计算所述第二暗角区域的所有像素的灰度值总和以得到第四灰度值总和,对所述第四灰度值总和与所述第四像素点数执行除运算以得到所述第二暗角灰度平均值。
28.本发明还提供一种检测装置,其特征在于,包括:
29.激光装置,用于向目标物体发射激光脉冲;
30.成像传感器,用于接收所述激光脉冲并形成第一图像和第二图像,并依据所述第一图像获取第一图像灰度平均值和第一暗角灰度平均值,依据所述第二图像获取第二图像灰度平均值和第二暗角灰度平均值;
31.处理模块,与所述成像传感器连接,用于计算相机盖板与目标物体间的距离,用于对所述第一暗角灰度平均值与所述第一图像灰度平均值执行比值运算以得到第一比值,对所述第二暗角灰度平均值与所述第二图像灰度平均值执行比值运算以得到第二比值,并对所述第二比值与所述第一比值执行比值运算以得到第三比值;
32.所述处理模块还用于依据所述第三比值与第一阈值的比较结果判断待检测相机盖板是否处于脏污状态。
33.本发明的所述检测装置的有益效果在于:
34.本发明通过成像传感器获取第一图像和第二图像,通过成像传感器获取第一图像灰度平均值、第一暗角灰度平均值、第二图像灰度平均值和第二暗角灰度平均值;通过处理模块获取第一比值、第二比值和第三比值,并判断第三比值与第一阈值的大小,从而依据第三比值与第一阈值的比较结果来判断待检测盖板是否处于脏污状态。提高了相机盖板的清洁度检测结果的可靠性,提高了所述相机盖板的清洁度检测方法的准确性。
35.优选地,当所述处理模块判断所述第三比值大于或等于所述第一阈值,判定所述待检测相机盖板处于脏污状态;
36.当所述处理模块判断所述第三比值小于所述第一阈值,判定所述待检测相机盖板处于清洁状态。
附图说明
37.图1为本发明实施例的相机盖板的清洁度检测方法流程图;
38.图2为本发明实施例的判断待检测盖板是否处于脏污状态的流程图;
39.图3为本发明实施例的判断待检测盖板的脏污程度的流程图;
40.图4为本发明实施例的检测装置的结构示意图;
41.图5为本发明实施例的相机盖板与激光装置的位置示意图。
具体实施方式
42.为使本发明实施例的目的、技术方案和优点更加清楚,下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。除非另外定义,此处使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本文中使用的“包括”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。
43.针对现有技术存在的问题,本发明实施例提供了一种相机盖板的清洁度检测方法,为实现上述目的,图1为本发明实施例的相机盖板的清洁度检测方法流程图。参照图1,相机盖板的清洁度检测方法包括步骤:
44.s1:通过具有参照盖板的相机获取目标物体的第一图像,参照盖板的状态为清洁状态,以保证检测相机盖板的清洁度的可靠性。依据第一图像获取第一图像灰度平均值ir_mean_1和第一暗角灰度平均值ir_ref,对第一暗角灰度平均值ir_ref与第一图像灰度平均值ir_mean执行比值运算以得到第一比值 ratio_ref,第一比值的计算公式为:
45.ratio_ref=ir_ref/ir_mean_1;
46.通过具有待检测盖板的相机获取目标物体的第二图像,依据第二图像获取第二图像灰度平均值ir_mean_2和第二暗角灰度平均值ir_test,对第二暗角灰度平均值ir_test与第二图像灰度平均值ir_mean_2执行比值运算以得到第二比值ratio_test,第二比值的计算公式为:
47.ratio_test=ir_test/ir_mean_2。
48.s2:对第二比值ratio_test与第一比值ratio_ref执行比值运算以得到第三比值ratio,第三比值的计算公式为:
49.ratio=ratio_test/ratio_ref;
50.依据第三比值ratio与第一阈值thres的比较结果判断待检测盖板是否处于脏污状态。
51.本发明的相机盖板的清洁度检测方法的有益效果在于:
52.通过具有参照盖板的相机获取第一图像,并从第一图像中获取第一图像灰度平均值和第一暗角灰度平均值,并计算得到第一比值,作为相机盖板的清洁度检测的参考;通过具有待检测盖板的相机获取第二图像,并从第二图像中获取第二图像灰度平均值和第二暗角灰度平均值,并计算得到第二比值,最后依据第二比值与第一比值得到第三比值,并依据第三比值与第一阈值的比较结果,判断待检测盖板是否处于脏污状态。本发明的相机盖板的清洁度检测方法对两个图像中进行了四次灰度平均值的计算得到四个灰度平均值,从而提升了计算的像素点样本量,提高了相机盖板的清洁度检测结果的可靠性。通过计算灰度平均值,从而避免了个别异常像素或异常像素区域的灰度值过大或过小造成的检测结果不准确的情况,提高了相机盖板的清洁度检测方法的准确性。本发明的相机盖板的清洁度检测方法步骤简单严谨,不需要频繁设置动态阈值,相机盖板的清洁度检测简单。
53.在步骤s1之前,还包括对盖板和目标物体进行定位,使所述目标物体位于相机的最远可量测距离内。以使相机获取的图像更加清晰,避免出现相机盖板与目标物体过远或
过近而造成的像素点不清晰或像素点的灰度值计算不准确的情况,获取的像素点更加可靠,使相机盖板的脏污状态的判断结果准确度更高。
54.在一些实施方式中,相机的最远可量测距离具体为相机的激光装置与目标物体之间的距离。
55.作为本发明一种优选的实施方式,步骤s1中,依据第一图像获取第一图像灰度平均值和第一暗角灰度平均值的步骤包括:
56.计算第一图像内像素点数以得到第一像素点数pixels_1,并计算第一图像内所有像素的灰度值总和以得到第一灰度值总和ir_sum_1,对第一灰度值总和 ir_sum_1与第一像素点数pixels_1执行除运算以得到第一图像灰度平均值 ir_mean_1。第一图像灰度平均值的计算公式如下:
57.ir_mean_1=ir_sum_1/pixels_1;
58.在第一图像中确定第一暗角区域,计算第一暗角区域内的像素点数以得到第二像素点数pixels_2,并计算第一暗角区域的所有像素的灰度值总和以得到第二灰度值总和ir_sum_2,对第二灰度值总和ir_sum_2与第二像素点数pixels_2 执行除运算以得到第一暗角灰度平均值ir_ref。第一暗角灰度平均值的计算公式如下:
59.ir_ref=ir_sum_2/pixels_2。
60.作为本发明一种优选的实施方式,步骤s1中,依据第二图像获取第二图像灰度平均值和第二暗角灰度平均值的步骤包括:
61.计算第二图像内像素点数以得到第三像素点数pixels_3,并计算第二图像内所有像素的灰度值总和以得到第三灰度值总和ir_sum_3,对第三灰度值总和 ir_sum_3与第三像素点数pixels_3执行除运算以得到第二图像灰度平均值 ir_mean_2。第一图像灰度平均值的计算公式如下:
62.ir_mean_2=ir_sum_3/pixels_3;
63.在第二图像中确定第二暗角区域,计算第二暗角区域内的像素点数以得到第四像素点数pixels_4,并计算第二暗角区域的所有像素的灰度值总和以得到第四灰度值总和ir_sum_4,对第四灰度值总和ir_sum_4与第四像素点数pixels_4 执行除运算以得到第二暗角灰度平均值ir_test。第二暗角灰度平均值的计算公式如下:
64.ir_test=ir_sum_4/pixels_4。
65.作为本发明一种优选的实施方式,图2为本发明实施例的判断待检测盖板是否处于脏污状态的流程图。参照图2,步骤s2中,依据第三比值与第一阈值的比较结果判断待检测盖板是否处于脏污状态包括步骤:
66.s20:当判断第三比值ratio大于或等于第一阈值thres_1,即当ratio≥thres_1 时,判定待检测盖板处于脏污状态;
67.s21:当判断第三比值ratio小于第一阈值thres_1,即ratio<thres_1时,判定待检测盖板处于清洁状态。
68.作为本发明一种优选的实施方式,当判定待检测盖板处于脏污状态后,还执行步骤s3,步骤s3包括:
69.设置第二阈值thres_2和第三阈值thres_3,第二阈值thres_2大于第一阈值 thres_1,第三阈值thres_3大于第二阈值thres_2,即三个阈值之间的大小关系为:
70.thres_1<thres_2<thres_3;
71.依据第三比值ratio与第一阈值thres_1、第二阈值thres_2和第三阈值thres_3 的比较结果判断待检测盖板的脏污程度。
72.作为本发明一种优选的实施方式,图3为本发明实施例的判断待检测盖板的脏污程度的流程图。参照图3,依据第三比值与第一阈值、第二阈值和第三阈值的比较结果判断待检测盖板的脏污程度的步骤包括:
73.s30:当判断第三比值ratio大于或等于第一阈值thres_1且小于第二阈值 thres_2时,即thres_1≤ratio<thres_2时,判定待检测盖板的脏污程度为轻脏;
74.s31:当判断第三比值ratio大于或等于第二阈值thres_2且小于第三阈值 thres_3时,即thres_2≤ratio<thres_3时,判定待检测盖板的脏污程度为中脏;
75.s32:当判断第三比值ratio大于或等于第三阈值thres_3,即ratio≥thres_3 时,判定待检测盖板的脏污程度为重脏。其优点为,判断待检测盖板的脏污程度,以提高相机盖板的清洁度检测的精确度。
76.在一些实施方式中,第一阈值thres_1的数值可设置为5
‑
10,第二阈值thres_2 的数值可设置为10
‑
15,第三阈值thres_3的数值可设置为大于15的数值。
77.本发明还提供了一种检测装置,图4为本发明实施例的检测装置的结构示意图。参照图4,检测装置包括:
78.激光装置5,用于向目标物体1发射激光脉冲;
79.成像传感器6,用于接收目标物体1反射回来的激光脉冲并形成第一图像和第二图像,获取第一图像和第二图像,并依据第一图像获取第一图像灰度平均值和第一暗角灰度平均值,并依据第二图像获取第二图像灰度平均值和第二暗角灰度平均值;
80.处理模块3,用于对第一暗角灰度平均值与第一图像灰度平均值执行比值运算以得到第一比值,对第二暗角灰度平均值与第二图像灰度平均值执行比值运算以得到第二比值,并对第二比值与第一比值执行比值运算以得到第三比值;
81.处理模块还3用于依据第三比值与第一阈值的比较结果判断待检测相机盖板是否处于脏污状态。
82.本发明的检测装置的优点在于:
83.本发明通过成像传感器6获取第一图像和第二图像、第一图像灰度平均值、第一暗角灰度平均值、第二图像灰度平均值和第二暗角灰度平均值;通过处理模块3获取第一比值、第二比值和第三比值,通过判断模块4判断第三比值与第一阈值的大小,从而依据第三比值与第一阈值的比较结果来判断待检测盖板是否处于脏污状态。提高了相机盖板的清洁度检测结果的可靠性,提高了相机盖板的清洁度检测方法的准确性。
84.处理模块3还用于依据相机盖板2和目标物体1间的距离对相机盖板和目标物体进行定位,使得目标物体1在相机的最远可量测距离内。具体为激光装置5与目标物体1之间的实际距离在相机的最远可量测距离范围内。
85.本发明的处理模块3判断待检测相机盖板的状态的步骤如下:
86.当处理模块3判断第三比值小于第一阈值,判定待检测相机盖板处于清洁状态;
87.当处理模块3判断第三比值大于或等于第一阈值,判定待检测相机盖板处于脏污状态,当处理模块3判定相机盖板处于脏污状态后,还执行判断相机盖板的脏污程度步骤:
88.当处理模块3判定第三比值大于或等于第一阈值且小于第二阈值,判定待检测相机盖板处于轻度脏污状态;
89.当处理模块3判定第三比值大于或等于第二阈值且小于第三阈值,判定待检测相机盖板处于中度脏污状态;
90.当处理模块3判定第三比值大于或等于第三阈值,判定待检测相机盖板处于重度脏污状态。
91.为实现检测相机盖板清洁度后的报警或提示功能,本发明的检测装置还包括报警装置4和控制电路7。报警装置4通过控制电路7与处理模块3连接。当处理模块3判定相机盖板处于脏污状态时,控制电路7控制报警装置4产生报警信号,以提示用户相机盖板处于脏污状态,需及时清理相机盖板,以保证相机的准确测距性能。
92.在一些实施方式中,报警装置为能产生报警光信号的led提示灯或能产生报警提示音的音响。
93.在本发明一种具体的实施方式中,图5为本发明实施例的相机盖板与激光装置的位置示意图。参照图5,相机盖板2、目标物体1、激光装置5和成像传感器6的位置关系如图5。相机盖板2的左侧为相机盖板2的内侧,激光装置5 和成像传感器6均位于相机盖板2的内侧。相机盖板2的右侧为相机盖板2的外侧,目标物体1位于相机盖板2的外侧。检测脏污像素点的原理如下:
94.参照图5,当相机盖板2上有脏污区域20时,激光装置5发出的激光脉冲未经过脏污区域20时候,直接穿过相机盖板2而射到目标物体1上,经过目标物体1的反射再穿回相机盖板2内从而射到成像传感器6上,其光线传播路径为l1,在成像传感器6接收经目标物体1反射回来的激光;
95.激光装置5发出的激光脉冲经过脏污区域20的光线会被脏污区域20反射回来,一部分被脏污区域20反射的激光脉冲传输至成像传感器6的左上角的暗角区域、右上角的暗角区域、左下角的暗角区域和右下角的暗角区域,左上角的暗角区域、右上角的暗角区域、左下角的暗角区域和右下角的暗角区域的总和为暗角区域,从而在成为图像中的暗角区域的像素。其光线传播路径为l2,成像传感器6接收经脏污区域20反射回来的激光,成像传感器6的暗角区域60 接收反射的激光。
96.因此在相机盖板2上有脏污时,暗角区域内的像素点灰度值明显增大,且脏污面积越大,灰度值增大的像素点越多。待检测盖板相机检测的暗角灰度平均值与第二图像整体区域的灰度平均值的第二比值,会明显大于清洁盖板相机检测的暗角区域灰度值平均值与第一图像整体区域的灰度平均值的第一比值,第二比值和第一比值的比值大于第一阈值,判定待检测盖板处于脏污状态。
97.暗角是指拍摄的图像在四角区域会变暗的现象。本发明的暗角区域是指在成像传感器的左上角区域、左下角区域、右上角区域和右下角区域四个区域的像素比图像整体的像素暗,在相机盖板处于清洁状态时,暗角区域的像素点的灰度值会比图像整体的灰度值低。在相机盖板处于脏污状态时,一部分激光会被脏污区域反射至暗角区域,从而使暗角区域的像素点的灰度值增大。
98.可说明的是,暗角区域的面积和相机的机械装配的遮挡有关,因此每个相机的拍摄的图像的暗角区域面积及暗角区域相对于整个图像的面积占比均不相同。
99.在一些实施方式中,暗角区域的面积占整个第一图像面积或第二图像面积的0.8%。
100.虽然在上文中详细说明了本发明的实施方式,但是对于本领域的技术人员来说显而易见的是,能够对这些实施方式进行各种修改和变化。但是,应理解,这种修改和变化都属于权利要求书中所述的本发明的范围和精神之内。而且,在此说明的本发明可有其它的实施方式,并且可通过多种方式实施或实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。