1.本发明涉及一种农业设备,尤其是涉及一种幼苗抓取装置。
背景技术:
2.水培蔬菜,是指大部分根系生长在营养液液层层中,只通过营养液为其提供水分、养分、氧气的有别于传统土壤栽培形式下进行栽培的蔬菜。水培蔬菜营养液配方科学,各种营养元素配比合理,生产的蔬菜营养全面,富含多种人体所必需的维生素和矿物质。目前,水培蔬菜种植模式不断升级更新,机械化程度逐步提高,在蔬菜种植过程中有一步是将幼苗盘中的幼苗转移到苗盘上的苗杯内,后续取出苗杯后再将苗杯放在培养液中进行种植。
3.目前幼苗的抓取都是人工用手抓取,工人用手指将幼苗盘里的幼苗连同基质土一起抓取后放到苗盘上的苗杯内,对工人来说工作强度大,工作效率低,而且长时间反复操作对手指也有损伤,因此有必要发明一种幼苗抓取装置。
技术实现要素:
4.针对上述问题,本发明旨在提供一种幼苗抓取装置,其能快速抓取幼苗盘里的幼苗,不易损伤幼苗,自动化程度高,工作效率高。
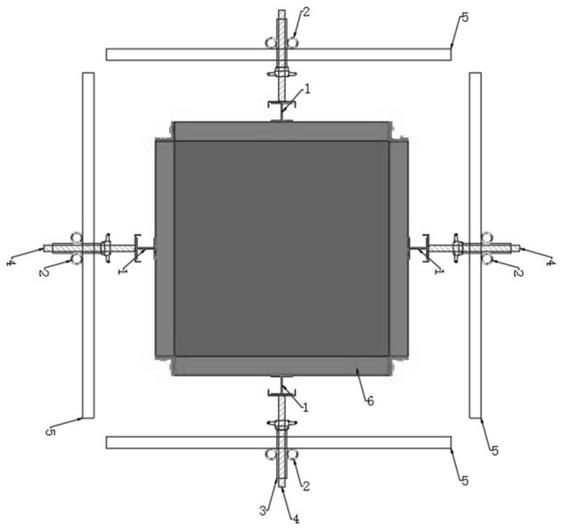
5.本发明的技术方案是一种幼苗抓取装置,包括位于中部的主连接杆,所述主连接杆上部设置有安装座,所述主连接杆下端连接有导向座,所述导向座上设置有贯通导向座上下表面的沿径向布置的长条形导向孔,所述主连接杆外表面位于安装座下方处设置有气囊,所述安装座上沿圆周方向等角度设置有至少三个铰接座,每个所述铰接座上铰接有活动臂,所述活动臂穿过长条形导向孔后位于导向座下方,所述活动臂外侧设置有弹簧安装槽,多个活动臂的弹簧安装槽外围处套设有收紧弹簧,所述收紧弹簧保持将所有活动臂向内收紧的状态,所述活动臂内部沿轴向设置有连接在一起并可沿轴向滑动的活塞伸缩杆和抓苗杆,所述活动臂上对应活塞伸缩杆分别设置有进气口和出气口;通过对气囊充气或者放气来控制气囊的膨胀或收缩配合收紧弹簧来实现所有活动臂的张开或抓紧,通过进气口和出气口的进气方向来推动活塞伸缩杆沿轴向滑动来实现抓苗杆的伸出和缩回。
6.优选的,所述抓苗杆后端与活塞伸缩杆前端通过连接滑块连接在一起,所述抓苗杆前端为扁平部,该扁平部的表面面对主连接杆轴线位置。
7.优选的,所述铰接座的数量为三个或者四个或者五个。
8.优选的,所述弹簧安装槽位于导向座上方,所述收紧弹簧缠绕在所有活动臂同一高度处的弹簧安装槽外侧表面上。
9.优选的,所述活动臂外表面位于气囊位置处设置有与气囊接触的包覆块。
10.本发明能快速抓取幼苗盘里的幼苗,通过配套设备移动至苗盘上的苗杯内,抓取过程中不易损伤幼苗,自动化程度高,工作效率高。
附图说明
11.图1为本发明活动臂张开时的结构示意图;
12.图2为图1中抓苗杆伸出时的结构示意图;
13.图3为图2中活动臂抓紧时的结构示意图;
14.图4为图3中抓苗杆缩回时的结构示意图;
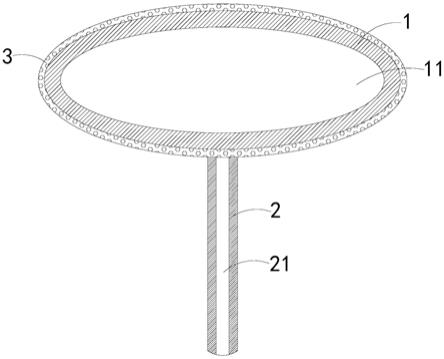
15.图5为本发明的一个局部结构示意图;
16.图6为本发明中活动臂的结构示意图;
17.图7为图6沿a
‑
a方向的剖视图;
18.图8为本发明中抓苗杆的结构示意图;
19.其中:1—主连接杆;2—安装座;3—导向座;4—长条形导向孔;5—气囊;6—铰接座;7—活动臂;8—弹簧安装槽;9—收紧弹簧;10—活塞伸缩杆;11—抓苗杆;12—进气口;13—出气口;14—连接滑块;15—包覆块。
具体实施方式
20.下面结合附图,对本发明作进一步详细说明。
21.如图1至图8所示,本发明提供了一种幼苗抓取装置,包括位于中部的主连接杆1,所述主连接杆1上部设置有安装座2,所述主连接杆1下端连接有导向座3,所述导向座3上设置有贯通导向座3上下表面的沿径向布置的长条形导向孔4,所述主连接杆1外表面位于安装座2下方处设置有气囊5,所述安装座2上沿圆周方向等角度设置有至少三个铰接座6,每个所述铰接座6上铰接有活动臂7,所述活动臂7穿过长条形导向孔4后位于导向座3下方,所述活动臂7外侧设置有弹簧安装槽8,多个活动臂7的弹簧安装槽8外围处套设有收紧弹簧9,所述收紧弹簧9保持将所有活动臂7向内收紧的状态,所述活动臂7内部沿轴向设置有连接在一起并可沿轴向滑动的活塞伸缩杆10和抓苗杆11,所述活动臂7上对应活塞伸缩杆10分别设置有进气口12和出气口13;通过对气囊5充气或者放气来控制气囊5的膨胀或收缩配合收紧弹簧9来实现所有活动臂7的张开或抓紧,通过进气口12和出气口13的进气方向来推动活塞伸缩杆10沿轴向滑动来实现抓苗杆11的伸出和缩回。
22.优选的,所述抓苗杆11后端与活塞伸缩杆10前端通过连接滑块14连接在一起,所述抓苗杆11前端为扁平部,该扁平部的表面面对主连接杆1轴线位置。
23.优选的,所述铰接座6的数量为三个或者四个或者五个。
24.优选的,所述弹簧安装槽8位于导向座3上方,所述收紧弹簧9缠绕在所有活动臂7同一高度处的弹簧安装槽8外侧表面上,确保收紧弹簧9安装位置的稳定,使得所有活动臂7处于预收紧状态。
25.优选的,所述活动臂7外表面位于气囊5位置处设置有与气囊5接触的包覆块15,配合气囊5是膨胀和收缩执行活动臂的张开和抓紧动作。
26.本发明的工作过程如下,在此选取安装座2上铰接四个活动臂7时的结构进行说明:
27.第一步,外部移动机构将本发明移动至幼苗盘上方设定位置,在此过程中,此时气囊5处于充气状态,四个活动臂7克服收紧弹簧9的收紧力被撑开,活动臂7沿着导向座3上的长条形导向孔4向外侧滑动后处于张开状态,此时四个活动臂7分别位于幼苗上方四个方位
的外侧位置,抓苗杆11位于活动臂7内部,本发明处于图1所示的状态;
28.第二步,通过控制进气口12处进气,出气口13处出气来推动活塞伸缩杆10向前滑动,带动抓苗杆11从活动臂7前端内孔中伸出,抓苗杆11前端的扁平部插入幼苗四侧的基质土中,本发明处于图2所示的状态;
29.第三步,控制气囊5放气,四个活动臂7在收紧弹簧9的收紧力作用下向内收紧,活动臂7沿着导向座3上的长条形导向孔4向内侧滑动后处于收紧状态,此时四个抓苗杆11前端的扁平部相互配合抓住幼苗连同基质土一起,本发明处于图3所示的状态;
30.第四步,外部移动机构将本发明移动至苗盘上的苗杯内,通过控制出气口13处进气,进气口12处出气,来推动活塞伸缩杆10向后滑动,进而带动抓苗杆11缩回至活动臂7的内孔中,此时本发明处于如图4所示的状态,接着控制气囊充气,使得四个活动臂7克服收紧弹簧9的收紧力被撑开,活动臂7沿着导向座3上的长条形导向孔4向外侧滑动后处于张开状态,通过外部移动机构将本发明重新移动至幼苗盘上方设定位置。
31.重复上述步骤,即可实现将幼苗盘内的幼苗抓取移动至苗盘上的苗杯内,整个过程工作效率高,速度快,且不易损伤幼苗,替代了人工抓取幼苗的工作。
32.以上所述,仅是本发明的较佳实施方式,并非对发明作任何形式上的限制,凡是依据本发明的技术原理对以上实施例所做的任何简单修改、等同变化或修饰,仍属于本发明技术方案的范围内。
技术特征:
1.一种幼苗抓取装置,其特征在于:包括位于中部的主连接杆(1),所述主连接杆(1)上部设置有安装座(2),所述主连接杆(1)下端连接有导向座(3),所述导向座(3)上设置有贯通导向座(3)上下表面的沿径向布置的长条形导向孔(4),所述主连接杆(1)外表面位于安装座(2)下方处设置有气囊(5),所述安装座(2)上沿圆周方向等角度设置有至少三个铰接座(6),每个所述铰接座(6)上铰接有活动臂(7),所述活动臂(7)穿过长条形导向孔(4)后位于导向座(3)下方,所述活动臂(7)外侧设置有弹簧安装槽(8),多个活动臂(7)的弹簧安装槽(8)外围处套设有收紧弹簧(9),所述收紧弹簧(9)保持将所有活动臂(7)向内收紧的状态,所述活动臂(7)内部沿轴向设置有连接在一起并可沿轴向滑动的活塞伸缩杆(10)和抓苗杆(11),所述活动臂(7)上对应活塞伸缩杆(10)分别设置有进气口(12)和出气口(13);通过对气囊(5)充气或者放气来控制气囊(5)的膨胀或收缩配合收紧弹簧(9)来实现所有活动臂(7)的张开或抓紧,通过进气口(12)和出气口(13)的进气方向来推动活塞伸缩杆(10)沿轴向滑动来实现抓苗杆(11)的伸出和缩回。2.根据权利要求1所述的一种幼苗抓取装置,其特征在于:所述抓苗杆(11)后端与活塞伸缩杆(10)前端通过连接滑块(14)连接在一起,所述抓苗杆(11)前端为扁平部,该扁平部的表面面对主连接杆(1)轴线位置。3.根据权利要求1所述的一种幼苗抓取装置,其特征在于:所述铰接座(6)的数量为三个或者四个或者五个。4.根据权利要求1所述的一种幼苗抓取装置,其特征在于:所述弹簧安装槽(8)位于导向座(3)上方,所述收紧弹簧(9)缠绕在所有活动臂(7)同一高度处的弹簧安装槽(8)外侧表面上。5.根据权利要求1所述的一种幼苗抓取装置,其特征在于:所述活动臂(7)外表面位于气囊(5)位置处设置有与气囊(5)接触的包覆块(15)。
技术总结
本发明提供了一种幼苗抓取装置,包括位于中部的主连接杆,所述主连接杆上部设置有安装座,主连接杆下端连接有导向座,导向座上设置有贯通导向座上下表面的沿径向布置的长条形导向孔,主连接杆外表面位于安装座下方处设置有气囊,安装座上沿圆周方向等角度设置有至少三个铰接座,每个所述铰接座上铰接有活动臂,活动臂穿过长条形导向孔后位于导向座下方,活动臂外侧设置有弹簧安装槽,多个活动臂的弹簧安装槽外围处套设有收紧弹簧,收紧弹簧保持将所有活动臂向内收紧的状态,活动臂内部沿轴向设置有连接在一起并可沿轴向滑动的活塞伸缩杆和抓苗杆,活动臂上对应活塞伸缩杆分别设置有进气口和出气口。本发明抓苗效率高,速度快,不易损伤幼苗。不易损伤幼苗。不易损伤幼苗。
技术研发人员:朱利宾
受保护的技术使用者:台州绿沃川自动化设备制造有限公司
技术研发日:2020.11.26
技术公布日:2021/10/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。