1.本发明属于小麦红蜘蛛测报技术领域,具体涉及一种直接在小麦田间进行的小麦红蜘蛛测报样本采集统计系统和方法。
背景技术:
2.目前小麦红蜘蛛测报采用的是人工调查方式,既费时费力,又计数不准确,其缺点主要表现在以下三点:
3.1、计数不准确。目前人工调查小麦红蜘蛛数量,是通过用手拍打小麦,将植株上的红蜘蛛振落于铺在麦根际的白纸或白塑料布或白瓷盘上获取样本,受到惊扰的红蜘蛛在获取样本的物体上迅速四处移动,且个体小,采用目测计数困难很大,往往不能准确计数。
4.2、工作量大,工作效率低。按照农业部小麦红蜘蛛测报技术规范要求,在小麦返青后至抽穗期,每5天调查1次,调查田块涉及不同生态环境的麦田,每类田需调查2~3块,每块田采用对角线5点取样,调查时间又仅限于当天8~10时或16~18时,边调查边记录,时间短,任务重,工作量大,工作效率低。
5.3、留样困难。由于采集样本数量大,加之活螨移动性强,给样本留存带来很大困难。
6.本发明全面解决现用方法存在的所有缺点。
技术实现要素:
7.本发明所要解决的技术问题是针对现有技术的不足提供一种小麦红蜘蛛测报样本采集统计系统和方法。
8.本发明的技术方案如下:
9.一种小麦红蜘蛛测报样本采集统计系统,包括样本采集装置和样本统计装置;样本采集装置包括采样箱体(1)、箱盖组件(2)、振动控制器(3);样本统计装置包括智能手机客户端和服务器端,智能手机客户端用于对样本采集装置内的红蜘蛛进行拍摄,并将采集的图像传输到具有图像识别、统计功能的服务器端,在服务器端进行图像预处理、图像识别和分类统计;
10.采样箱体(1)包括箱体(11)、转轴座(12)、箱盖转轴插入导槽(13);箱体(11)为缺少顶面和与该顶面相邻的一个侧面的长方体盒体,该缺少的一个侧面为采样箱体(1)的开放端,使用时,该开放端与麦苗根部对齐,该缺少的顶面用于容纳箱盖组件(2)的箱盖(21),使用时,箱盖(21)将该缺少的顶面封闭;开放端两侧的两个侧面靠近顶部的位置开设有转轴座(12),该转轴座(12)为以圆孔,该圆孔的直径比切圆转轴(22)外径稍大,切圆转轴(22)能够在该圆孔中自由旋转;箱盖转轴插入导槽(13)为一矩形开口,该矩形开口与转轴座(12)连通,切圆转轴(22)通过该矩形开口插入到转轴座(12)中,该矩形开口的尺寸小于切圆转轴(22)的外径。
11.所述的小麦红蜘蛛测报样本采集统计系统,箱盖组件(2)包括箱盖(21)、切圆转轴
(22)、与箱盖一体的电池与控制器盒(23)、拍打板导柱(24)、导柱限位挡圈(25)和拍打板(26),箱盖(21)的下面固定有四个拍打板导柱(24),振动元件(28)也固定在箱盖(21)的下面且位于四个拍打板导柱(24)的中心位置,拍打板(26)固定在振动元件(28)上,拍打板(26)的下面带有拍打板肋条(27),拍打板(26)的四角开设圆孔,该四个圆孔穿在四个拍打板导柱(24)上,能够在四个拍打板导柱(24)上自由震动;导柱限位挡圈(25)固定在四个拍打板导柱(24)的底端用于对拍打板(26)进行限位。
12.所述的小麦红蜘蛛测报样本采集统计系统,电池与控制器盒(23)与箱盖(21)和拍打板(26)的一侧固定在一起,电池与控制器盒(23)的上部设置切圆转轴(22),切圆转轴(22)插入转轴座(12)以后,在箱盖(21)和拍打板(26)转动至与箱体(11)底面平行或者与箱体(11)底面垂直的时候,电池与控制器盒(23)均能够将采样箱体(1)的开放端进行封堵。
13.所述的小麦红蜘蛛测报样本采集统计系统,电池与控制器盒(23)的截面呈(90)度扇形,利用外围的圆弧对开放端进行良好的封堵,且转动过程中电池与控制器盒(23)的圆弧不会对小麦植株造成伤害。
14.根据任一所述样本采集统计系统的样本采集方法,包括以下步骤:
15.a1、将采样箱体(1)的开放端正对待采样麦苗(6)的根部;
16.a2、将带振动器的箱盖组件(2)竖直放置,然后将箱盖侧面的切圆转轴(22)沿导槽(13)推入采样箱体(1)的槽底,使转轴到达转轴座(12);
17.a3、合上箱盖组件(2),在安装箱盖组件(2)过程中,箱盖组件(2)的电池盒外壳推动直立的麦苗靠压在采样箱(1)底部棱边上,合盖过程中,圆弧形状的电池盒外壳确保合盖时麦苗(6)呈接近水平状,合上盖后,箱盖组件下部的拍打板及拍打板肋条(27)与麦苗(6)接触;
18.a4、开启振动控制器(3)开关接通振动元件(28),振动元件(28)带动拍打板及拍打板肋条沿拍打板导柱(24)上下快速振动对小麦进行拍打;
19.a5、通过对麦苗的振动拍打,小麦红蜘蛛落入采样箱体(1)的底部;
20.a6、拍打完成后,关闭电源,取下箱盖组件(2),完成样本采集。
21.根据任一所述样本采集统计系统的识别统计方法,包括以下步骤:
22.b1、图像采集:在野外采集红蜘蛛,智能手机客户端对采集盒内的红蜘蛛进行拍摄;
23.b2、图像预处理、图形变换:服务器接收客户端传输过来的待处理图像,先进行去除背景、灰度化、去除噪声、图像二值化处理,然后采用滑动窗口进行目标定位,并用方框标注出待检测的目标;
24.(1)输入一张图片,采用lazy snapping的方法,去除背景的图像进行灰度化处理;再使用高斯滤波后进行图像二值化;
25.(2)对二值化的图像使用selective search算法提取生成约2000个候选区域;
26.(3)对每个候选区域边缘进行加p=16个像素膨胀处理,膨胀后将候选区域加框;将每个候选区尺寸变换的到227x 227;
27.b3、图像识别:
28.采用tensorflow框架构造并行化的alexnet卷积神经网络模型,将每个候选区域输入r
‑
cnn卷积神经网络得到一个4096维的特征向量,判定是不是蜘蛛,留下是蜘蛛的方框
给下一步处理;
29.r
‑
cnn卷积神经网络模型设有两个输入端口,输入数据经过卷积层conv、激活函数relu、池化层pool和批量归一化bn的多层处理,输出的数据采用并行结构的卷积层conv进行级联merge,再用全连接层fc连接,获取前向传播结果logits;
30.r
‑
cnn卷积神经网络采取迁移学习策略,先在imagenet上预训练,利用卷积神经网络充分学习浅层的特征,训练时使用sgd算法,初始学习率取0.001,batch_size取128;然后去掉预训练好的最后一层全连接层,修改类别数,用户在小规模数据集做规模化训练,用户标注数据缺乏时微调cnn,提高识别物体类型的能力;
31.b4、将从神经网络导出的特征向量导入svm分类器,产生类别分数;
32.b5、设定iou指标阈值(>0.3),通过计算iou指标,采用非极大性抑制,以最高分的框为基础,去除掉重叠框,得到该类中得分最高的候选框;
33.b6、分类统计:分类是为了将两种蜘蛛识别出来,然后统计他们的数目;
34.b7、结果输出:将分类统计的结果通过服务器通讯模块传输返回给客户端,客户端存储识别统计结果。
35.采用新型小麦红蜘蛛测报样本采集统计系统,可实现麦田小麦红蜘蛛样本的快速采集、样本留取和准确计数,省时省力,提高样本采集和统计效率。
附图说明
36.图1为小麦红蜘蛛测报样本采集统计系统组成示意图;。
37.图2为采样箱体结构示意图;
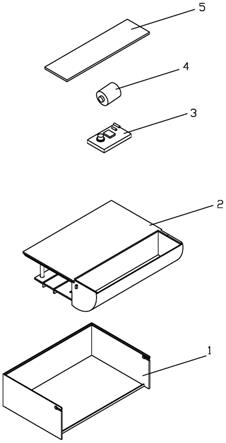
38.图3为箱盖组件结构示意图;
39.图4为使用方法示意图;
40.图5为安装及使用方法示意图;
41.图6为手机客户端方法流程图;
42.图7为服务器端方法流程图;
43.1采样箱体,包含:11箱体、12转轴座、13箱盖转轴插入导槽;2箱盖组件,包含:21箱盖、22切圆转轴、23电池与控制器盒、24拍打板导柱、25导柱限位挡圈、26拍打板、27拍打板肋条、28振动元件;3振动控制器;4电池;5电池盒盖;6麦苗。
具体实施方式
44.以下结合具体实施例,对本发明进行详细说明。
45.如图1
‑
5所示,小麦红蜘蛛测报样本采集统计系统,包括样本采集装置和样本统计装置;样本采集装置包括采样箱体1、箱盖组件2、振动控制器3;样本统计装置包括智能手机客户端和服务器端,智能手机客户端用于对样本采集装置内的红蜘蛛进行拍摄,并将采集的图像传输到具有图像识别、统计功能的服务器端,在服务器端进行图像预处理、图像识别和分类统计;
46.采样箱体1包括箱体11、转轴座12、箱盖转轴插入导槽13;箱体11为缺少顶面和与该顶面相邻的一个侧面的长方体盒体,该缺少的一个侧面为采样箱体1的开放端,使用时,该开放端与麦苗根部对齐,该缺少的顶面用于容纳箱盖组件2的箱盖21,使用时,箱盖21将
该缺少的顶面封闭;开放端两侧的两个侧面靠近顶部的位置开设有转轴座12,该转轴座12为以圆孔,该圆孔的直径比切圆转轴22外径稍大,切圆转轴22能够在该圆孔中自由旋转;箱盖转轴插入导槽13为一矩形开口,该矩形开口与转轴座12连通,切圆转轴22通过该矩形开口插入到转轴座12中,该矩形开口的尺寸小于切圆转轴22的外径。
47.箱盖组件2包括箱盖21、切圆转轴22、与箱盖一体的电池与控制器盒23、拍打板导柱24、导柱限位挡圈25和拍打板26,箱盖21的下面固定有四个拍打板导柱24,振动元件28也固定在箱盖21的下面且位于四个拍打板导柱24的中心位置,拍打板26固定在振动元件28上,拍打板26的下面带有拍打板肋条27(与麦苗接触,对麦苗施加震动),拍打板26的四角开设圆孔,该四个圆孔穿在四个拍打板导柱24上,能够在四个拍打板导柱24上自由震动;导柱限位挡圈25固定在四个拍打板导柱24的底端用于对拍打板26进行限位;
48.电池与控制器盒23与箱盖21和拍打板26的一侧固定在一起,电池与控制器盒23的上部设置切圆转轴22,切圆转轴22插入转轴座12以后,在箱盖21和拍打板26转动至与箱体11底面平行或者与箱体11底面垂直的时候,电池与控制器盒23均能够将采样箱体1的开放端进行封堵,防止红蜘蛛逃逸,优选的,电池与控制器盒23的截面呈90度扇形,利用外围的圆弧对开放端进行良好的封堵,防止红蜘蛛逃逸,且转动过程中电池与控制器盒23不会对小麦植株造成伤害。
49.振动元件28由固定的线圈和弹簧、活动铁芯实现;振动控制器3由振荡电子线路和驱动线路组成,振荡线路频率可调以控制拍打频率,驱动线路输出电流可调控制拍打强度;电池4由可充电电池组构成;智能手机6选用带高清晰、放大20倍的摄像头的智能手机。
50.一、样本采集
51.1、将符合采样规范、净底平面为333mm
×
200mm的采样箱体1的开放端正对待采样麦苗6的根部(见图4);
52.2、将带振动器的箱盖组件2竖直放置,然后将箱盖侧面的切圆转轴22沿导槽13推入采样箱体1的槽底,使转轴到达转轴座12(见图4);
53.3、合上箱盖组件2,在安装箱盖组件2过程中,箱盖组件2的电池盒外壳推动直立的麦苗靠压在采样箱1底部棱边上,合盖过程中,圆弧形状的电池盒外壳确保合盖时麦苗6呈接近水平状,合上盖后,箱盖组件下部的拍打板及拍打板肋条27与麦苗6接触(见图5);
54.4、开启振动控制器3开关接通振动元件28,振动元件28带动拍打板及拍打板肋条沿拍打板导柱24上下快速振动对小麦进行拍打,振动元件28的拍打频率和速度由振动控制器3调节控制,振动控制器3的电力由电池4供给;
55.5、通过对麦苗的振动拍打,小麦红蜘蛛落入采样箱体1的底部;
56.6、拍打完成后,关闭电源,取下箱盖组件2,完成样本采集。
57.二、图像采集、识别及统计
58.1、图像采集:红蜘蛛的形体较小,图像识别需要高放大倍数近焦距的高清晰镜头和高分辨率的摄影头的智能手机或数码照相机,在适当的光线条件下,对采集盒内的红蜘蛛进行拍摄。在野外采集红蜘蛛,智能手机客户端通常使用装有图像远程传输、数据返回功能的app手机,采集的图像经互联网传输到具有图像预处理、图形变换、图像识别、统计功能的服务器端中进行图像处理。
59.2、图像预处理、图形变换:服务器接收客户端传输过来的待处理图像,先进行去除
背景、灰度化、去除噪声、图像二值化等处理,然后采用滑动窗口进行目标定位,并用方框标注出待检测的目标。
60.(1)输入一张图片,采用lazy snapping的方法,去除背景的图像进行灰度化处理;再使用高斯滤波后进行图像二值化;
61.(2)对二值化的图像使用selective search算法提取生成约2000个候选区域;
62.(3)对每个候选区域边缘进行加p=16个像素膨胀处理,膨胀后将候选区域加框;将每个候选区尺寸变换的到227x 227。
63.3、图像识别:
64.采用tensorflow框架构造并行化的alexnet卷积神经网络模型,将每个候选区域输入r
‑
cnn卷积神经网络得到一个4096维的特征向量,判定是不是蜘蛛,留下是蜘蛛的方框给下一步处理。
65.r
‑
cnn卷积神经网络模型设有两个输入端口,输入数据经过卷积层conv、激活函数relu、池化层pool和批量归一化bn的多层处理,输出的数据采用并行结构的卷积层conv进行级联merge,再用全连接层fc连接,获取前向传播结果logits;
66.r
‑
cnn卷积神经网络采取迁移学习策略,先在imagenet上预训练,利用卷积神经网络充分学习浅层的特征,训练时使用sgd算法,初始学习率取0.001,batch_size取128;然后去掉预训练好的最后一层全连接层,修改类别数(3类=2目标 1背景),用户在小规模数据集做规模化训练,用户标注数据缺乏时微调cnn,提高识别物体类型的能力。
67.4、将从神经网络导出的特征向量导入svm分类器,产生类别分数;
68.5、设定iou指标阈值(>0.3),通过计算iou指标,采用非极大性抑制,以最高分的框为基础,去除掉重叠框,得到该类中得分最高的候选框。
69.6、分类统计:分类是为了将两种蜘蛛识别出来,然后统计他们的数目。
70.7、结果输出:将分类统计的结果通过服务器通讯模块传输返回给客户端,客户端存储识别统计结果。
71.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。