1.本发明涉及海洋环境技术领域,具体涉及一种基于水下机器人的海洋环境监测系统。
背景技术:
2.海洋环境包括海洋环境中的植物、动物和哺乳动物。海洋水下作业可能会影响到海洋环境,例如影响到海洋环境中的哺乳动物。例如,在水下作业时,可能偶然地捕捉、伤害和/或杀死保护物种、濒危物种。
3.因此,监测海洋环境,避免水下作业时影响到海洋环境中的动物,具有一定的研究价值。
技术实现要素:
4.鉴于以上技术问题,本发明的目的在于提供一种基于水下机器人的海洋环境监测系统,解决在水下作业时容易影响到海洋环境中的动物的问题。
5.本发明采用以下技术方案:
6.一种基于水下机器人的海洋环境监测系统,包括监测中心、水下机器人以及微处理模块;其中,
7.监测中心,用于接收并存储微处理模块发送的数据,并向微处理模块发送控制信号;
8.微处理模块,用于接收水下机器人采集到的数据,对采集得到的数据进行处理,根据处理后的数据对海洋环境情况进行评估,并将评估结果传输给监测中心;接收监测中心的控制指令,根据接收到的控制指令控制水下机器人的活动状态;
9.所述水下机器人包括机器人本体,所述机器人本体设有第一处理单元和环境检测模块;
10.所述环境检测模块,包括一个或多个距离检测单元和声波检测单元;所述声波检测单元用于监测由海洋环境中的物体引起的声波,并将所述声波传送给处理单元;所述距离检测单元用于在声波检测单元检测到由海洋环境中的物体引起的声波时,向海洋环境中的物体发射信号,接收海洋环境中的物体反射的反射信号,并基于发射信号和反射信号产生传感器信号,将所述传感器信号发送给第一处理单元;所述第一处理单元,用于根据所述传感器信号确定所述物体与水下机器人的距离。
11.可选的,所述声波检测单元包括:
12.水听器阵列,用于在选择监测的海域后,接收水中的声波信号,并将所述声波信号传送给接收单元;
13.接收单元,用于接收水听器阵列发送的声波信号,并将所述声波信号依次进行滤波、放大和a/d转换后发送给第二处理单元;
14.所述第二处理单元,用于根据接收单元发送的声波信号,判断所述声波信号是否
为海洋环境中的物体引起的声波。
15.可选的,所述声波检测单元还包括定时回路;
16.所述定时回路用于提供时间信号,并对a/d转换后的声波信号数据按照一设定时长进行等分,再对每个等时长的数据进行平均处理,得到多个等时长数据的均值数据,将均值数据发送第二处理单元;所述第二处理单元,用于根据接收的均值数据,判断所述声波信号是否为海洋环境中的物体引起的声波。
17.可选的,所述第二处理单元,还用于在接收单元发送的声波信号的频率位于预设频率范围时,判定所述声波信号为海洋环境中的物体引起的声波。
18.可选的,所述第二处理单元,还用于根据卡尔曼滤波器或粒子滤波器来组合多个传感器信号,根据所述多个传感器信号确定所述海洋环境中的物体在所述海洋环境中的位置。
19.可选的,所述距离检测单元采用无线测距装置,所述无线测距装置发送的发射信号采用量子无线电信号或低频磁无线电信号。
20.可选的,所述距离检测单元采用声波测距装置。
21.可选的,所述声波测距装置包括超声波测距传感器、测量电路、偏差增益电路、a/d转换电路、功率放大电路、单片机控制模块、l充气泵、浮子开关、进气阀门、gps模块和电池组;其中,超声波测距传感器与测量电路相连接,测量电路与偏差增益电路相连接,偏差增益电路与a/d转换电路相连接,a/d转换电路与功率放大电路相连接,功率放大电路与单片机控制模块相连接,单片机控制模块分别与充气泵、进气阀门、gps模块相连接,浮子开关内部含有继电器电路,与进气阀门相连接。
22.可选的,所述水听器阵列包括多条水听器基元阵列,每条所述水听器基元阵列包含多个水听器和两个光纤聋探头;
23.所述光纤聋探头包括迈克尔逊干涉仪、支撑刚体、双层空气腔;所述双层空气腔由外部圆筒和内部圆筒构成,所述外部圆筒套在内部圆筒上,形成所述双层空气腔;所述迈克尔逊干涉仪的参考臂缠绕于所述双层空气腔的内部圆筒上,所述迈克尔逊干涉仪的信号臂缠绕于所述双层空气腔的外部圆筒上,所述内部圆筒、所述外部圆筒均通过所述支撑刚体固定支撑。
24.可选的,所述水下机器人还包括换接工具,所述换接工具用于获取水下机器人需要换接的水下作业工具;
25.所述换接工具通过传送带浮出或潜水;所述换接工具安装有无线接收器和无线发射器,所述换接工具通过无线发射器发送无线信号至处理单元,所述换接工具通过无线接收器接收处理单元发送的无线信号;
26.所述第一处理单元,还用于根据所述换接工具发送的无线信号确定所述换接工具在海洋环境中的位置。
27.相比现有技术,本发明的有益效果在于:
28.本发明通过水下机器人的声波检测单元在检测到由海洋环境中的物体引起的声波时,再通过距离检测单元进行距离监测,采集到所述物体与水下机器人的距离,由微处理模块根据水下机器人采集的数据对海洋环境情况进行评估,根据评估结果控制水下机器人的活动状态,可实现对海洋环境的监测,避免在水下作业时,影响到海洋环境中的动物。
附图说明
29.图1为本发明一实施例提供的一种基于水下机器人的海洋环境监测系统的结构示意图;
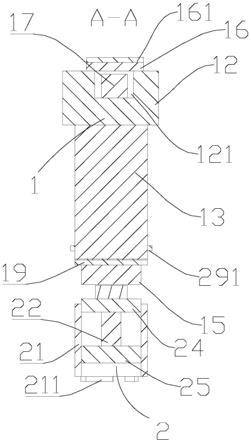
30.图2为本发明一实施例提供的一种环境检测模块结构示意图。
具体实施方式
31.下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例:
32.实施例一:
33.请参照图1所示,示出了本发明的一种基于水下机器人的海洋环境监测系统,包括监测中心、水下机器人以及微处理模块;其中,
34.监测中心10,用于接收并存储微处理模块发送的数据,并向微处理模块发送控制信号;
35.例如,当所述物体与水下机器人的距离小于预设距离值时,控制水下机器人朝远离所述海洋环境中的物体的方向移动。
36.微处理模块20,用于接收水下机器人采集到的数据,对采集得到的数据进行处理,根据处理后的数据对海洋环境情况进行评估,并将评估结果传输给监测中心10;接收监测中心10的控制指令,根据接收到的控制指令控制水下机器人的活动状态;
37.所述水下机器人包括机器人本体,所述机器人本体设有第一处理单元301和环境检测模块302;
38.所述环境检测模块302,包括一个或多个距离检测单元3012和声波检测单元3011;
39.所述声波检测单元3011用于监测由海洋环境中的物体引起的声波,并将所述声波传送给处理单元;所述声波检测单元3011通过检测由海洋环境中的物体引起的声波,例如,监测到的声波信号的频率大于200hz,且小于150khz,可表示监测到海洋环境中的物体。而当监测到声波信号的频率不在预设频率范围时,可能是由于地震等原因引起的声波。
40.所述距离检测单元3012用于在声波检测单元3011检测到由海洋环境中的物体引起的声波时,向海洋环境中的物体发射信号,接收海洋环境中的物体反射的反射信号,并基于发射信号和反射信号产生传感器信号,将所述传感器信号发送给第一处理单元301;所述第一处理单元301,用于根据所述传感器信号确定所述物体与水下机器人30的距离。
41.当水下机器人30位于海洋环境中时,可通过声波检测单元3011和距离检测单元3012在水面下近距离监视海洋环境,即通过声波检测单元3011监测海洋环境中的物体,并在检测到由海洋环境中的物体引起的声波时,通过距离检测单元3012测量所述物体在海洋环境中的位置。
42.在具体应用中,所述海洋环境可以是海洋远洋船舶或海洋静止平台的环境,也可以是海洋港口或港口的环境,也可以是海洋周围环境或海洋海况环境等。
43.其中,由海洋环境中的物体引起的声波可以是由海洋哺乳动物引起的,例如大的鲸类或海豚等,由海洋哺乳动物引起的声波频率一般大于200hz,且小于150khz。
44.因此,当检测到声波信号频率大于200hz,且小于150khz时,可判定所述声波信号
为海洋环境中的物体引起的声波。
45.本发明通过水下机器人30的声波检测单元3011在检测到由海洋环境中的物体引起的声波时,再通过距离检测单元3012进行距离监测,采集到所述物体与水下机器人30的距离,由微处理模块20根据水下机器人30采集的数据对海洋环境情况进行评估,根据评估结果控制水下机器人30的活动状态,可实现对海洋环境的监测,避免在水下作业时,影响到海洋环境中的动物。
46.具体的,所述距离检测单元3012可以是短距离(sr)的测距装置,也可以是中程(mr)的测距装置或远程(lr)的测距装置。
47.短距离的测距装置可覆盖高达约0至60或100米的范围。中程(mr)测距装置或远程(lr)测距装置可覆盖大约30m到1.8或2.0km的范围。
48.作为一实施例,所述距离检测单元3012采用无线测距装置,所述无线测距装置发送的发射信号采用量子无线电信号或低频磁无线电信号。
49.需要说明的是,由于普通的无线电信号应用于海洋环境时,容易受阻。本技术的距离检测单元3012在通过无线电信号进行距离测量时,无线电信号可以采用量子无线电或低频磁无线电。
50.通过量子无线电或低频磁无线电可以在水下通信中得到利用,实现测距。低频磁无线电与传统的电磁通信信号不同,低频磁无线电可以在更高的频率下穿透建筑材料、水和土壤,超低频电磁场已经在水下通信中得到运用。
51.在具体实施中,可以配置一个或多个距离检测单元3012,通过多个距离检测单元3012进行组合监测,可以改善物体监测的信噪比。
52.可选的,所述声波检测单元3011包括:
53.水听器阵列,用于在选择监测的海域后,接收水中的声波信号,并将所述声波信号传送给接收单元;
54.接收单元,用于接收水听器阵列发送的声波信号,并将所述声波信号依次进行滤波、放大和a/d转换后发送给第二处理单元;
55.所述第二处理单元,用于根据接收单元发送的声波信号,判断所述声波信号是否为海洋环境中的物体引起的声波。
56.进一步的,所述第二处理单元,还用于在接收单元发送的声波信号的频率大于200hz,且小于150khz时,判定所述声波信号为海洋环境中的物体引起的声波。
57.在接收单元发送的声波信号的频率大于200hz,且小于150khz时,可判定为所述声波信号为海洋环境中的物体引起的声波。在检测到海洋环境中的物体时,再进行距离测量。
58.可选的,所述声波检测单元3011还包括定时回路;
59.所述定时回路用于提供时间信号,并对a/d转换后的声波信号数据按照一设定时长进行等分,再对每个等时长的数据进行平均处理,得到多个等时长数据的均值数据,将均值数据发送第二处理单元;所述第二处理单元,用于根据接收的均值数据,判断所述声波信号是否为海洋环境中的物体引起的声波。
60.具体的,对每个等时长的数据进行平均处理可以是对每个等时长的数据中的各个频率值进行均值,得到每个等时长的数据的均值数据,例如,某一等时长的数据中具体包含频率为200hz的声波信号、频率为300hz的声波信号、频率为400hz的声波信号,且这三种频
率的声波信号持续时间相等,那么该等时长的数据进行平均处理后的均值数据为300hz的声波信号。
61.在上述实现过程中,通过根据接收的均值数据,判断所述声波信号是否为海洋环境中的物体引起的声波,可提高判定所述声波信号是否为海洋环境中的物体引起的声波的准确性。
62.可选的,第一处理单元301,可配置为基于多个传感器来确定海洋环境中的物体在海洋环境中的速度、加速度。
63.可选的,第一处理单元301可被配置为基于所述多个传感器信号导出点云信息,根据所述点云信息确定所述海洋环境中的物体在所述海洋环境中的位置,且可连续地确定物体的位置。所述点云信息,是指多个传感器信号的数据集合。
64.或,第一处理单元301被配置为使用状态估计滤波器,例如卡尔曼滤波器或粒子滤波器来组合所述多个传感器信号,来确定所述海洋环境中的物体在所述海洋环境中的位置。
65.可选的,第一处理单元301可配置为基于所述多个传感器信号确定海洋环境的气象和海洋参数,例如,海流速度,海流方向,海浪高度,海浪周期,海浪谱,海浪频率,海浪传播方向,海速和/或风向。
66.可选的,所述声波测距装置可采用具体电路装置实现,例如,包括超声波测距传感器、测量电路、偏差增益电路、a/d转换电路、功率放大电路、单片机控制模块、l充气泵、浮子开关、进气阀门、gps模块、电池组;其中,超声波测距传感器与测量电路相连接,测量电路与偏差增益电路相连接,偏差增益电路与a/d转换电路相连接,a/d转换电路与功率放大电路相连接,功率放大电路与单片机控制模块相连接,单片机控制模块分别与充气泵、进气阀门、gps模块相连接,浮子开关内部含有继电器电路,与进气阀门相连接。
67.所述声波测距装置的工作原理如下:通过单片机控制超声波测距仪进行测距,将测得的超声波信号输入到单片机中进行分析,将收集到的信息通过gps模块发送至监测中心10进行汇总;由于多个装置在深海中的不同深度可以形成一个三维定位的方式,因此,可实现对物体进行定位;当工作结束时,监测中心10会向装置内部的gps模块发送上浮的信号,单片机控制充气泵对充气浮漂进行充气,同时打开进气阀门,通过深海的压力将存水仓内部的水量排除以及充气浮漂的浮力,将装置浮出海面进行回收。
68.可选的,所述水听器阵列包括多条水听器基元阵列,每条所述水听器基元阵列包含多个水听器和两个光纤聋探头;
69.所述光纤聋探头包括迈克尔逊干涉仪、支撑刚体、双层空气腔;所述双层空气腔由外部圆筒和内部圆筒构成,所述外部圆筒套在内部圆筒上,形成所述双层空气腔;所述迈克尔逊干涉仪的参考臂缠绕于所述双层空气腔的内部圆筒上,所述迈克尔逊干涉仪的信号臂缠绕于所述双层空气腔的外部圆筒上,所述内部圆筒、所述外部圆筒均通过所述支撑刚体固定支撑。
70.通过利用不同水听器基元阵列的光相位噪声有一定相关性这一特点,采用对外界声信号不敏感的光纤聋探头获取光相位噪声,当声压作用于光纤聋探头时,经过空气腔的缓冲,且以相反的方向作用在传感光纤上,可将声压作用对光纤变化的影响降至足够低,从而使声压作用对干涉仪两臂输出干涉光信号相位差变化的影响足够小,便可获取光相位噪
声,从而对进行探测工作水听器的信号进行补偿,获取更准确的声波信号。
71.作为具体实施例,所述水下机器人30还包括换接工具,所述换接工具用于获取水下机器人30需要换接的水下作业工具;
72.所述换接工具通过传送带浮出或潜水;所述换接工具安装有无线接收器和无线发射器,所述换接工具通过无线发射器发送无线信号至处理单元,所述换接工具通过无线接收器接收处理单元发送的无线信号;
73.所述第一处理单元301,还用于根据所述换接工具发送的无线信号确定所述换接工具在海洋环境中的位置。
74.在传统的水下作业中,水下作业工具由水下作业机器人携带下潜,但一般的水下作业机器人在一次下潜作业中只能携带一种作业工具,需要水下作业机器人频繁上浮返回更换作业工具,制约了作业效率,增加了执行预期水下作业的时间。因此,通过配置换接工具,由换接工具浮出水面去获取待换接的水下作业工具,可减少执行预期水下作业的时间。
75.所述换接工具通过传送带浮出或潜水,具体的,所述换接工具还可通过电线或钢丝绳、钢丝绳,光纤、盘管、管、电
‑
液压脐带等浮出或潜水。部署的钢丝绳可以是自主的或远程控制的。所述换接工具安装有无线接收器和无线发射器,所述换接工具通过无线发射器发送无线信号至处理单元,所述换接工具通过无线接收器接收处理单元发送的无线信号;
76.具体的,当水下机器人30在海洋环境中,从无线发射机发射一个或多个无线信号,用无线接收机感知所述一个或多个无线信号,基于所述一个或多个无线信号确定所述换接工具在所述海洋环境中的位置,基于所述一个或多个无线信号将所述机器人本体导航到所述换接工具的位置。
77.当海底操作完成,或者水下作业工具需要更换时,换接工具可以独立地缩回到表面,并通过与水下机器人30的通信,可实时获取换接工具的定位,并确定换接工具在各种海流分布图中如何反应。通过配置换接工具,由换接工具浮出水面去获取待换接的水下作业工具,可减少执行预期水下作业的时间。
78.对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。