1.本发明涉及机器人、康复医学领域,具体地说,是一种用于踝关节康复的康复训练机器人。
背景技术:
2.踝关节位于下半身的远端,在步行和运动中起着重要的作用。对踝关节运动康复机器人的需求主要来自三方面的人群:一是老年人群,老年人高发率的高血压、糖尿病、关节炎、心脑血管疾病和呼吸系统疾病为康复治疗的主要病种;二是残疾人群,根据第六次全国人口普查及第二次全国残疾人抽样调查,2010年末我国残疾人已达到8502万人,其中5000多万人有康复需求;三是慢性病患者、亚健康人群需要康复治疗,预计至2030年,我国慢性病患病率将高达65.7%,其中80%的慢性病患者需要康复治疗。
3.参考国家标准《运动康复训练机器人通用技术条件》,一款好的运动康复机器人需要以下特征:在基本结构方面,机器人需要适当配置生理参数检测装置、在符合要求的硬质件外露部分进行适当保护;在运行参数方面,机器人需要做到阻力可设定或调节;在稳定性方面,机器人的侧翻稳定性应符合国家要求;在静载强度方面,主要支撑部件应无任何裂纹、破损等现象,对于训练中运动的部件,按国标进行疲劳强度试验后不应产生任何裂纹、破损等现象;在工作噪声方面,机器人正常使用时产生的工作噪声应不大于60db(a)。
4.目前国内外研发的踝关节运动康复机器人结构、控制均较为复杂,因此,形成完备产品的机器人价格普遍十分昂贵,无法进入到每一个患者家中,而且对于实验和实际应用效果并没有足够的案例进行反馈。踝关节运动康复机器人具备许多人工辅助训练无法比拟的优点,例如长期、稳定、精确、客观地重复训练与运动参数实时反馈、远程训练等,这些优点必将使踝关节运动康复机器人具有越来越大地实用价值。
技术实现要素:
5.为了克服已有技术的不足,本发明提供了一种踝关节运动康复机器人,通过对踝关节定期进行持续的被动运动,可以防止关节粘连、僵硬,防止周围软组织出现萎缩,还能促进踝关节的血液循环。
6.本发明解决其技术问题所采用的技术方案是:
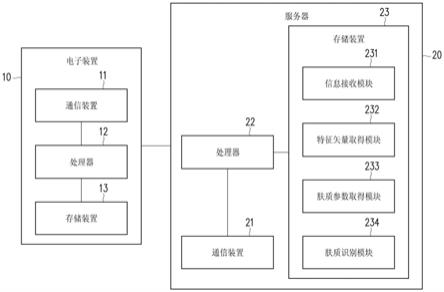
7.一种踝关节运动康复机器人,包括顶端动平台、中间动平台、连杆、定制轴套、静平台、步进电机和支撑杆,以静平台为底座,支撑杆安装在所述静平台上,支撑杆上由下至上安装大齿轮、主动套环、定制轴套和中间动平台,步进电机的输出轴与大齿轮联动,气缸输出轴与电动推杆连接,所述主动套环采用螺栓螺母与所述电动推杆连接,所述定制轴套与所述主动套环同轴安装,2号连杆中部与所述支撑轴固定连接,1号连杆及3号连杆通过角接触球轴承与2号连杆连接组成连杆机构,所述中间动平台与3号连杆连接,所述顶端动平台与中间动平台通过轴连接,所述限位装置由限位板、限位杆组成,通过限位轴与顶端动平台连接。
8.本发明中气缸驱动电动推杆带动主轴套环在支撑杆方向上运动,定制轴套与主轴套环连接,连杆机构与定制轴套连接,实现连杆机构一端在支撑轴方向上的运动;步进电机通过大齿轮转动,带动支撑轴转动,连杆机构一端固定在定制轴套上,另一端固定在中间动平台上,定制轴套及中间动平台随支撑轴同步转动,连杆机构在步进电机和气缸的驱动下实现同一水平面上的不同方向的翻转,顶端动平台运动与中间动平台一致,同时有限位装置限制顶端动平台各个方向的极限翻转角度,顶端动平台的轴位于人体足部重心处。
9.本发明中,机器人在保持一定倾斜角度时仅需步进电机提供保持扭矩,而电动推杆则无需提供保持扭矩,动力源数量少,能源消耗低。
10.本发明的有益效果主要表现在:通过对踝关节定期进行持续的被动运动,即踝关节处于该机器人下进行被动的康复运动,可以防止关节粘连、僵硬,防止周围软组织出现萎缩,还能促进踝关节的血液循环。
附图说明
11.图1是本发明的踝关节运动康复机器人三维模型图。
12.图2是本发明的踝关节运动康复机器人二维图。
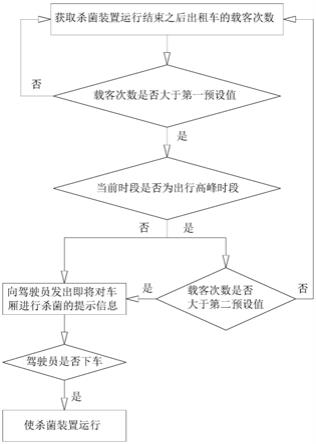
13.图3是本发明的踝关节运动康复机器人运动极限位置图,其中,(a)为跖曲极限位置,(b)为内翻极限位置;(c)为背曲极限位置,(d)为外翻极限位置。
14.图中:1为顶端动平台,2为中间动平台,3为1号连杆,4为定制轴套,5为静平台,6为气缸,7为步进电机,8为支撑杆,9为2号连杆,10为3号连杆,11为大齿轮,12为电动推杆,13为限位装置,14为主动套环。
具体实施方式
15.下面结合附图对本发明作进一步描述。
16.参照图1~图3,一种踝关节运动康复机器人,包括顶端动平台1、中间动平台2、定制轴套4、静平台5、步进电机7和支撑杆8,以静平台5为底座,支撑杆8安装在所述静平台上,支撑杆8上由下至上安装大齿轮11、主动套环14、定制轴套4和中间动平台2,步进电机7的输出轴与大齿轮11联动,气缸6输出轴与所述电动推杆12连接,所述主动套环14采用螺栓螺母与电动推杆12连接,所述定制轴套4与所述主动套环14同轴安装,2号连杆9中部与所述支撑杆8固定连接,1号连杆3及3号连杆10通过角接触球轴承与2号连杆9连接组成连杆机构,所述中间动平台2与3号连杆10连接,所述顶端动平台1与中间动平台2通过轴连接,所述限位装置13由限位板、限位杆组成,通过限位轴与顶端动平台1连接。
17.如图3所示,踝关节运动康复机器人在四个方向上的极限翻转位置。在步进电机和气缸的驱动下,中间动平台随支撑杆转动,主轴套环与定制轴套在支撑杆方向上改变位置,通过连杆机构实现中间动平台的翻转。通过改变脉冲信号的频率和脉冲数能够调整步进电机的输出以满足不同康复训练的需要。
18.本实施例的踝关节运动康复机器人,包括步进电机、气缸、中间动平台、顶端动平台、连杆机构、支撑杆、定制轴套、限位装置、大齿轮、静平台,所述步进电机带动轴套转动,所述连杆机构与定制轴套固定连接,所述中间动平台与连杆机构及支撑轴固定连接,所述顶端动平台通过轴与中间动平台相连接,与顶端动平台连接的限位装置限制了极限翻转角
度,运动控制策略分析如下:
19.康复训练时,一个气缸启动后带动所述电动推杆在所述支承轴方向上做周期性往复运动,所述定制轴套与所述主轴套环连接并在所述电动推杆驱动下在所述支撑轴方向上运动。所述定制轴套带动所述连杆机构的一端实现竖直方向上的运动。通过所述连杆机构驱动中间动平台实现某一方向上的翻转。步进电机驱动所述大齿轮转动,所述支撑杆与所述大齿轮运动保持一致。所述定制轴套在所述支撑杆的驱动下实现连杆机构及中间动平台的转动。步进电机和气缸配合使用实现中间动平台在同一平面内不同方向上的翻转。所述顶端动平台通过轴与中间动平台相连接,能够实现以轴为中心各个方向上的翻转,同时通过限位装置限制翻转的极限角度(内/外翻:15
°
~-35
°
;跖/背曲:27
°
~-37
°
)。步进电机和气缸产生的运动相互配合实现康复训练的目的。
20.本说明书的实施例所述的内容仅仅是对发明构思的实现形式的列举,仅作说明用途。本发明的保护范围不应当被视为仅限于本实施例所陈述的具体形式,本发明的保护范围也及于本领域的普通技术人员根据本发明构思所能想到的等同技术手段。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。