1.本发明涉及用于车辆用的完全或部分液压作用的制动系统的致动装置,该致动装置具有:制动主缸,该制动主缸具有带活塞和工作室的活塞
‑
缸单元,其中,工作室液压连接至或能够连接至储存器和踏板感觉模拟器并且经由致动装置、特别是制动踏板进行机械连接,并且工作室能够经由在断电时打开的至少一个阀与至少一个制动回路连接;以及至少一个液压作用的轮制动器,所述至少一个轮制动器分配给制动回路并且各自分配有至少一个专用的可控切换阀,轮制动器能够借助于可控切换阀连接至相应的制动回路以特别是在制动力助力操作中用于压力升高和压力降低,并且该致动装置具有:压力供应件,该压力供应件由电动马达驱动,并且该压力供应件的活塞能够借助于缸中的电动马达进行调节;带电磁阀的至少一个阀组件,所述至少一个阀组件用于轮特定的闭环压力控制;以及至少一个电动控制单元,所述至少一个电动控制单元用于至少控制阀组件的阀和压力供应件的马达的阀;以及至少一个受控出口阀,液压介质特别是在abs功能中或在闭环控制操作期间可以经由所述至少一个受控出口阀从相应的轮制动器或制动回路中直接地排放到储存器中。
背景技术:
2.针对半自动(sad)和全自动(fad)驾驶的要求、特别是安全要求对系统配置具有主要影响。这些要求需要冗余的或部分冗余的系统和部件。
3.在此的焦点在于压力供应,即便没有驾驶员的脚部,也必须通过压力供应来确保制动力或压力升高。电子控制器也必须对应地配置成用于该功能。对于3级、特别是4级,即使在发生故障的情况下,也必须同样确保abs功能。
4.通过冗余的压力供应,也可以实现不具有串联式主缸hz而仅具有所谓的电动踏板或针对5级仅具有制动开关的系统概念。在此,以下专利申请值得注意:de 10 2017 222 450公开了一种具有仅一个主缸、冗余压力供应、用于主缸的隔离阀以及行程模拟器的液压系统,两个制动回路之间的旁通阀允许在第二压力供应的压力供应发生故障的情况下向两个制动回路提供供应。在断电时打开的阀与安全性极为相关,因为阀的故障和例如制动回路的故障可能导致完全的制动故障。此外,在阀上的花费非常高。
5.de 10 2017 222 435和de 10 2016 225 537提出了相似的概念,但是具有电动踏板、降低的压力供应和旁通阀。在压力降低期间,所有的系统使用所谓的出口阀来用于abs功能。如果在阀打开时,灰尘颗粒进入该阀的阀座,这会导致在下一次制动操作期间出现制动回路故障。
6.de 10 2017 207 954提出了一种具有冗余压力供应且不具有用于闭环abs压力控制的出口阀的系统概念。在此使用de 102005055751和de 102009008944 a1中已描述的所谓多路复用方法,在该多路复用方法中,对abs的压力控制借助于体积测量和压力信息根据压力供应执行。在此,用于压力控制的切换阀也被冗余地使用。如果用于储存器的活塞密封件或止回阀发生故障并且切换阀由于灰尘颗粒发生泄漏,则会出现安全风险,这同样会导致完全的制动故障。
7.以上示例表明了休眠故障的问题,如果在制动操纵之前无法通过诊断检测到这些故障,则在双故障的情况下,休眠故障变得至关重要。
8.制动系统的封装或结构体积同样非常重要。特别是在具有sad(半自动)和fad(全自动驾驶)的系统的情况下,在结构性设计的构型中必须考虑从具有串联式制动主缸(thz)或单个制动主缸(hz)的2级到不具有thz或hz的5级的许多变型。特别地,具有2个压力供应件或压力供应装置(dv)的3级至5级概念难以在封装方面以较小的结构体积实现。封装的示例从ep2744691和de2016032116160400中已知,ep2744691具有压力供应件(dv)相对于制动主缸(hz)轴线的竖向布置结构,de2016032116160400具有压力供应装置相对于制动主缸(hz)轴线的平行布置结构,这些示例需要较小的结构宽度。单个制动主缸通常需要具有多个冗余的制动系统。如果制动主缸例如被设计成具有冗余且可诊断的密封件,以及位于压力供应中的其他冗余(例如,具有2x3相连接的压力供应、冗余车载电气系统连接),则可以实现单个制动系统,并且特别是可以使用其他模块(例如电动驻车制动器、电动驱动器马达)以用于制动。
9.de102016105232 a1已经公开了一种具有小结构体积的封装,其中,由至少一个压力供应装置与至少一个电子开环和闭环控制单元、至少一个储存器以及制动主缸构成的一体化冗余压力供应组合在一个模块中,所述至少一个压力供应装置具有阀、特别是组合在液压单元中的电磁阀。
技术实现要素:
10.本发明的目的是为2级至3级的自动驾驶建立一个非常便宜的1箱式解决方案,该1箱式解决方案具有短且窄的构造,此外,该1箱式解决方案对于基于该1箱式解决方案的随后结合有第二压力供应件的其他解决方案也是模块化的。
11.发明优点
12.所述目的借助于具有权利要求1的特征的系统来实现。根据权利要求1中所述的系统的有利配置源自从属权利要求的特征。
13.提出了一种具有小结构体积的封装,该封装具有一体化冗余压力供应,该压力供应由下述各者构成:至少一个压力供应装置,该压力供应装置具有阀、特别是组合在液压单元中的电磁阀;至少一个电子开环和闭环控制单元;至少一个储存器;单个制动主缸及踏板行程传感器和具有活塞的行程模拟器。本发明提供了用于制动系统的模块化致动系统的不同变型,该制动系统包括尽可能多的用于制造和组装的相同部件。
14.根据本发明的可能变型优选地是:
15.变型a:
16.是具有仅一个模块的1箱式解决方案,该模块包括压力供应装置、阀组件(hcu)、开环和闭环控制单元(ecu)以及储存器(vb),
17.变型b:
18.是具有仅一个模块的1箱式解决方案,该模块具有压力供应装置,其中,至少一个压力供应装置具有冗余配置,也就是说,例如具有双车载电气系统连接或冗余相绕组,并且其中,阀组件(hcu)、控制单元(ecu)和储存器(vb)同样被包括在该模块中。
19.变型c:
20.与变型c相同的模块,但具有完全地或部分地冗余配置的开环和闭环控制单元。
21.变型d:
22.使用电动驱动器马达和/或电动驻车制动器进行制动,尤其是在模块/子系统发生故障的情况下使用电动驱动器马达和/或电动驻车制动器进行制动。
23.以下描述的壳体在此有利地使用。这些壳体形成下述子组件:子组件在组装后形成用于安装到车辆中的整个单元:
24.壳体a:包括用于压力供应装置dv1的阀组件(hcu),阀组件(hcu)具有例如阀(v)、电磁阀(mv)以及一个或更多个压力换能器(dg)。
25.壳体b:包括开环和闭环控制单元ecu,该开环和闭环控制单元ecu不具有带主插塞连接器的冗余或者具有带车载电气系统所连接的两个插塞连接器的部分或完全冗余。
26.壳体c:用于具有踏板行程传感器和小型传感器ecu的制动主缸hz和变型e所用的储存器vb。制动主缸hz还包括用于制动踏板的踏板接合部(pi)并且还包括带活塞和弹簧的行程模拟器。
27.壳体a(hcu)优选地由挤压模制件制造而成,该挤压模制件非常高度地适合使用填缝技术进行紧固和组装。在此,具有活塞驱动器和滚珠丝杆驱动器kgt的压力供应装置dv1要与马达、连同阀和电磁阀一起结合。用于开环和闭环控制单元ecu的接合部也类似于abs/esp。具有上述部件(壳体c)中的所有部件的制动主缸hz可以旋拧至壳体a——这适用于除了e和f之外的所有变型。在此,将壳体c作为与单元分开的子组件安装到隔板上,并且将来自制动主缸hz的液压管线连接至壳体a。在变型a和d中,储存器vb位于壳体a中具有连接至制动回路的两个连接件或具有连接至压力供应件dv的附加连接件。储存器vb中的浮子包括与开环和闭环控制单元ecu中的传感器元件连接的目标。马达可以优选地经由中间壳体连接至壳体a,该中间壳体优选地由塑料构成。马达和活塞位置换向所需的传感器可以优选地在与活塞相反定位的侧部上沿着马达轴线附接至马达壳体并且连接至开环和闭环控制单元ecu。在此,传感器相对于ecu位于附加壳体中。作为电磁阀的电磁线圈的电气连接的冗余,相对于主电路板pcb而言附加的小电路板可以用于电磁线圈的第二连接。
28.图示的封装满足模块化和小结构体积的要求,并且在成本和重量方面也非常便宜。
29.通过设置特殊的传感器壳体,可以容易地补偿根据本发明的单元的壳体的与制造有关的公差,使得马达传感器可以可靠地安置在意在用于该马达传感器的位置处。
30.此外,由于储存器的特殊设计,该储存器注入口颈部或开口可以有利地布置在电子控制单元或致动装置的壳体的前侧部上或前侧部前方,使得能够容易地接近。由于前注入口颈部与控制单元的壳体的后部的连接——该连接侧向地伸延经过电子控制单元的壳体——储存器本身可以方便地布置在控制单元的后方。储存器的侧向区域或中央区域可以有利地被设计成窄的,使得致动装置由此不比常规储存器的情况宽、或仅略微宽于常规储存器的情况。
31.每个轮制动器分配有切换阀。如果没有设置附加的出口阀,则为了在相应的轮制动器中改变压力,必须打开相关联的切换阀,其中,压力供应装置通过压力供应装置的活塞的对应运动来升高或降低压力。一旦轮制动器中的压力已经通过闭环控制被设定,相关联的切换阀就会再次关闭,并且可以在另一轮制动器中执行压力变化。
32.通过为至少一个轮制动器或一个制动回路设置至少一个出口阀,可以用仅一个压力供应装置来提供高动态esp和/或abs功能,其中,压力经由分配给轮制动器的切换阀升高。借助于分配给轮制动器的出口阀,压力因而可以在轮制动器的切换阀关闭的情况下通过直接消散到储存器中而被降低,其中,同时可以借助于压力供应装置在另一轮制动器或另一制动回路中执行压力变化。
33.出口阀应当特别地设置在具有大容量的液压消耗器上(例如设置在前轴的轮制动器上)或将制动回路隔离的隔离阀之间的中心点处(图5)。根据制动回路配置(对角线或黑/白),出口阀布置在液压概念中的不同点处。
34.在制动力助力操作和恢复操作中,借助于压力供应通过活塞的前后运动来升高以及降低压力;在此,出口阀操作成是关闭的。在闭环控制操作中,例如在abs的情况下,主要使用根据de 102005055751和de 102009008944 a1的多路复用方法,并且出口阀仅在极端动态要求情况下用于压力降低,其中,压力降低优选地在压力换能器的信号的帮助下进行。这意味着制动回路仅在极少数情况下向储存器打开,这在可靠性方面具有决定性优势。此外,切换阀布置成使得存在于轮制动器(rb)中的压力迫使切换阀(sv)的阀控制元件远离该切换阀(sv)的阀座。
35.如果压力供应需要附加的体积,则在压力供应的隔离阀关闭的情况下,体积从储存器重新补充至制动回路。
附图说明
36.以下将在附图的基础上更详细地讨论不同的变型。
37.在附图中:
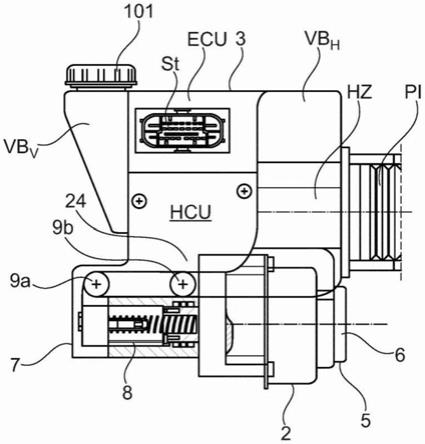
38.图1:示出了根据本发明的具有壳体a、b、c和储存器vb以及踏板接合部(pi)的一体化单元的侧视图;
39.图1a:示出了穿过马达壳体、电子控制单元和传感器壳体的横截面图示;
40.图1b:示出了储存器的节省空间的示意性配置;
41.图1c:示出了根据图7的具有电子控制单元的示意性图示的壳体和用于阀组件的壳体的储存器;
42.图2:示出了关于根据图1的1箱式模块的设计的替代性实施方式;
43.图2a:示出了图2中所示模块的前视图;
44.图3:示出了穿过制动主缸hz、行程模拟器ws和pi的截面图;
45.图4:是踏板行程传感器的图示;
46.图5:示出了根据本发明的作为所谓的一体1箱式系统的液压系统的可能实施方式,该液压系统具有用于将两个制动回路连接的故障安全阀组件、带致动装置的主缸,以及带电子开环和闭环控制装置的仅一个压力供应装置;
47.图6:具有仅一个压力供应的液压系统,然而该液压系统具有冗余的马达控制器;
48.图6a:示出了如根据图6的液压系统,但该液压系统具有带双行程活塞的压力供应装置;
49.图7:是在前车轴和后车轴处具有轮制动器的制动系统的可能实施方式的示意性图示,其中,电动驱动器马达驱动该后车轴;
50.图8至图10:示出了可能的制动系统的其他变型;
51.图11a:示出了出口阀的黑/白布置;
52.图11b:示出了出口阀的对角线布置。
具体实施方式
53.图1示出了具有阀组件hcu的一体化单元壳体a的侧视图,该一体化单元壳体a包含的部件有电磁阀mv、压力换能器dg、用于压力供应装置dv1的活塞以及压力供应装置dv1的马达的紧固件。诸如阀、电磁阀mv和压力换能器dg的部件优选地紧固至挤压的或连续挤压的块状件24,例如电磁阀mv优选地通过填缝或铆接来紧固至块状件,该电磁阀mv还包括电磁阀的密封件。在下部部分中,示出了压力供应单元dv1的具有复位弹簧和壳体盖7的活塞8,该活塞8例如优选地借助于马达2由主轴和滚珠丝杆驱动器kgt(未示出)驱动。在壳体a的情况下,活塞8借助于紧固螺钉经由中间壳体3旋拧至hcu块状件24。储存器vb2通过两个连接件9a和9b的方式连接至制动回路1和2。作为9c的延伸部,用于压力供应件dv的吸入阀sv定位在壳体中。
54.储存器vb具有带注入口开口100的注入口颈部vb
v
,该注入口开口100可以借助于盖101封闭并且在ecu的壳体的前方延伸,其中,中央区域vb
m
在ecu的壳体上侧向地向后延伸至单元的后侧部并且在储存器的后部区域vb
h
中敞开,使得液压介质可以从注入口颈部vb
v
进入到后部区域vb
h
中。
55.在相反的一侧上,具有连接至马达2和ecu 18两者的旋转角度传感器的传感器壳体3经由优选地柔性电路板(未示出)与中间壳体连接。插塞连接器附接在开环和闭环控制单元ecu的顶侧部上,插塞连接器在冗余ecu的情况下被双重实现。在具有单独的制动主缸hz的变型中,连接至制动主缸hz的对应连接管线以11设置。储存器vb可以以常规方式包括具有浮子的液位传感器(ns),其中,具有传感器元件的目标布置在开环和闭环控制单元ecu中,该开环和闭环控制单元ecu在4级和5级的情况下优选地是冗余配置。在完全一体化的型式中,制动主缸hz布置在阀组件hcu块状件的后方,该制动主缸借助于紧固螺钉13旋拧至hcu块状件24。
56.电动驱动器的一个重要部件是用于活塞的电子换向和位置控制的马达传感器34。马达可以与不同类型的驱动器,例如传动装置、梯形螺杆传动装置或具有滚珠丝杆驱动器58的主轴57组合使用,如图1a中所示。
57.可以使用不同类型的传感器、比如具有电感传感器或磁场敏感传感器的分段传感器、或者布置在马达轴线或传动装置轴线上的其他传感器。这些传感器在构造方面特别简单并且由例如呈两极或多极磁体形式的传感器目标和例如呈霍尔传感器、gmr传感器等形式的磁场敏感传感器元件构成。该传感器元件34电连接至电子控制单元ecu,该电子控制单元ecu直接地安装在马达上或经由中间壳体安装在马达上。传感器元件34优选地位于由外壳体部分52和内壳体部分52a构成的传感器壳体中并且容纳尤其是电路板22,传感器元件34可以布置在该电路板22上。
58.根据本发明,弹性部件61用于管理电子控制单元ecu的壳体18、马达壳体62和可能还存在的中间壳体(未示出)以及传感器壳体52/52a之间的各种安装公差。在极端情况下,在此需要对所有三个方向x、y、z上的公差进行补偿。这根据本发明借助于传感器壳体与电
子控制单元ecu的壳体18和马达壳体的对应构造和紧固来实现。在此,传感器壳体有利地分为两个部分,即外壳体52和内壳体52a,其中,壳体部分52、52例如借助于诸如焊接或粘结结合的常规连接技术彼此连接并且优选地由塑料制造而成。传感器壳体还紧固至马达壳体62,优选地在两个位置中紧固至马达壳体62。传感器电路板22在连接至插塞连接器条的上部部分中是柔性的以便于管理上述公差。例如,柔性pcb(柔性电路板)对此是适用的。从该柔性电路板22到电子控制单元ecu的主电路板23的电连接22a优选地借助于具有压配合触点的特别故障安全的插塞连接器51来实现。为了与主电路板23进行组装,电子控制单元ecu的壳体18具有带盖的孔口。
59.传感器壳体52、52a连接并固定至ecu壳体18的突出部。弹性部件61位于传感器壳体52、52a之间,该弹性部件61例如可以是柔性弹性密封件或密封波纹管。弹性部件优选地被设计为唇形密封件。因此,该柔性且弹性密封件61用于3轴线的公差补偿。从马达绕组到电路板23的电连接借助于常规的插入式触点来实现。
60.图1a中图示的这种传感器配置另外允许测量转子偏心度,该转子偏心度作用在主轴上并且在活塞8上产生横向力。布置在转子或主轴螺母56上并且在最简单的情况下是测量凸缘或盘的测量装置53用于测量转子偏心度。转子偏心度也沿轴向方向作用并且可以使用激光技术进行测量。为此,外部传感器壳体部分52a在其下部区域52”中具有开口152,该开口在测量之后借助于封闭插塞54封闭。测量装置53的表面可以在其面向外部传感器壳体部分52的侧部上具有用于测量的标记、设置有涂层以及/或者是异型的。下部区域52”借助于紧固螺钉55紧固至马达壳体62。
61.图1b示出了储存器vb的节省空间的示意性构型,该储存器vb具有前部区域vb
v
、中央区域vb
m
和后部区域vb
h
。前部区域vb
v
具有可以借助于盖101而被封闭的上注入开口100。如图1c中所示,储存器vb在三个侧部、即壳体b的前侧部ecu
‑
v、壳体b的侧壁ecu
‑
s以及壳体b的背侧部或后侧部ecu
‑
h处围绕电子控制单元ecu的壳体b接合。ecu
‑
h的背部面向隔板sw。根据该单元的设计,如图7a中所示,储存器vb也可以抵靠阀组件hcu的壳体的后壁或接合在阀组件hcu的壳体的后壁后方。
62.图2示出了与图1中所示的单元相关的稍微修改的实施方式。
63.图2a示出了从前方观察的视图。在此示出的是,外形轮廓8"仍可以容纳在小型真空器内并且因此适合安装在隔板上。主要优点在于:上述制动力助力器bkv具有近似50%的结构宽度,这非常有利于左手和右手驾驶车辆。上述制动力助力器bkv的结构长度也明显更短,并且因此形成了根据本发明的模块化概念的广泛使用的基础。在此,另外必须设置有不同的壳体a、壳体b、壳体c和壳体vb。壳体b位于例如hcu块状件24的后方并且旋拧至hcu块状件并被密封,如在abs的情况下位于例如hcu块状件24的后方并且旋拧至hcu块状件并被密封。
64.出于成本原因,提供一件式电路板pcb是有利的。对于进水的情况,电路板pcb可以通过具有两个冗余回路的开环和闭环控制件ecu的壳体中的带密封件的腹板分开。可能的导体印制线裂纹也有利地被冗余覆盖或排除。从马达到电路板pcb的其余电连接也很重要。
65.图3示出了具有壳体的制动主缸hz,在该壳体中安装有制动主缸(hz)活塞33和行程传感器(ws)活塞,这两个活塞具有用于相反力和踏板特性的弹簧。行程模拟器活塞也可以容纳在块状件a或壳体a中。活塞同样具有冗余密封件45,该冗余密封件45具有通向内部
的节流阀dr。在密封件45发生故障的情况下,该故障通过泄漏流的方式被识别并且该故障是不相关的。这种具有较小泄漏流的节流阀dr允许诊断出第一密封件的故障。行程模拟器活塞支撑在凸缘12上并且因此不需要单独的封闭件。具有复位弹簧50的制动主缸(hz)活塞23相对于行程模拟器活塞平行布置。活塞可以在滑动环48中以低摩擦被导引,并且在这种情况下活塞的密封作用也受到较小程度的损害。优选地,对于滑动环和密封件,使用单独的支承部件49,该支承部件49支撑在凸缘上,并且还借助于止挡环28支撑在活塞23的止挡部上。可以在制动主缸(hz)活塞中布置有用于对行程模拟器ws进行诊断的力
‑
行程传感器kws 30。传感器杆31和31a连接至活塞23并且连接至踏板柱塞。这些杆各自通过制动联轴器32至34的方式连接至活塞和踏板柱塞。该联轴器由滚珠34与壳体22中的弹簧33构成。这防止踏板柱塞在一个传感器杆被卡住的情况下发生堵塞。
66.图4示出了踏板行程传感器的两个替代性可能实施方式的布置结构。de 102015104246中已经描述了具有下述各者的第一变型:齿条38、齿轮37、用于目标35的驱动轴36和pcb 23上的传感器元件34。该型式需要很少的安装空间且价格便宜。在下部变型中,导引部件39例如通过销被压到传感器杆中。导引部件39在导引条40中的上部部分中被导引以便作用在目标41上的角度旋转较小。该目标作用在具有评估回路的感应传感器42上并且连接至主pcb 23并位于ecu壳体14中。
67.对于上述变型a至f,以下部件可以有利地具有相同的设计:
68.压力供应装置dv1:用于所有的变型a至f;
69.压力供应装置dv2:用于具有冗余压力供应的所有变型;
70.hcu/ecu:用于不具有冗余压力供应的两个变型;
71.制动主缸hz和行程传感器ws:与踏板传感器分开以及与踏板传感器集成以用于六个变型中的除了不具有制动主缸的变型f之外的五个变型。但是单独的制动主缸hz具有附加的储存器vb;
72.电磁阀mv:用于所有的变型;
73.马达传感器:用于所有的变型。
74.除了与系统f对应的电动踏板之外,所有的部件都是模块化的。因此,制造商和用户拥有模块化系统(oem)——模块化系统(oem)特别是为了使成本最小化的优异基础。
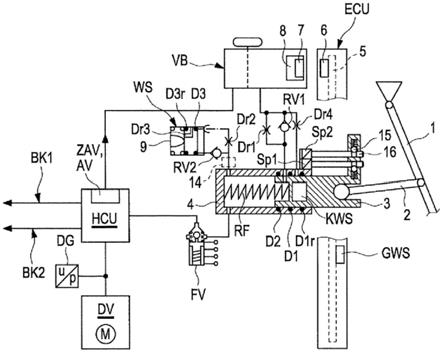
75.图5示出了可闭环控制的制动系统的基本元件,该制动系统由具有行程模拟器ws和储存器vb的制动主缸hz、压力供应装置dv1构成,其中,压力供应装置dv1具有电动活塞控制件。压力供应装置dv1与轮制动缸rz处的阀回路一起作用,该阀回路将闭环控制的轮压力例如在abs的情况下传送至制动器。这与现有技术对应。借助于一个压力供应装置dv1,可以通过闭环控制在两个制动回路bk1和bk2中经由两个连接阀bp1和bp2来设定压力。
76.然而,根据本发明的液压系统的意图是针对半自动驾驶(sad)或全自动驾驶(fad)具有高等级的故障安全性。
77.为此,应当考虑所有的与故障相关的部件、比如阀、传感器、密封件、马达和制动回路。因此,以下部件或液压连接应当被有利地设计为是故障安全的。
78.(1)从为第一制动回路设置的压力供应装置dv1到第二制动回路bk2的连接;
79.(2)从制动主缸hz的压力室经由阀fv到制动回路bk1、bk2经由阀bp1和bp2的连接;
80.(3)阀pd1和阀bd1经由分配给轮制动器的相应的切换阀sv与轮制动缸rz的连接;
81.(4)阀bd2经由分配给轮制动器的相应的切换阀sv与轮制动缸rz的连接;
82.(5)从制动回路bk1、bk2到储存器vb的连接;
83.(6)制动回路bk1、bk2与轮制动缸rz之间的连接。
84.以下将描述这些液压连接与各个部件的可能引发故障的故障。
85.压力供应装置dv1从制动回路bk1到制动回路bk2经由液压管线1、2和5经由切换阀sv作用至轮制动器rb。在现有技术中,仅为此目的而使用单个旁通阀。在此,如果另一阀中也存在休眠故障,则阀故障可能导致完全的制动故障。因此,本发明提供了两个冗余阀bp1和bp2,以便于允许从第一压力供应装置dv1连接至制动回路bk2。阀bp1和阀bp2的休眠故障由压力换能器借助于阀在压力变化的情况下发生短路来识别。在此阶段中,压力必须保持恒定。在第一压力供应装置dv1发生故障的情况下,例如在活塞密封件发生故障的情况下,防止了经由三个冗余阀bp1、bp2和pd1向制动回路bk2施加反作用。这些阀优选地是在断电时打开的阀,以便在压力供应装置dv1发生故障的情况下,制动主缸hz可以作用在制动回路bk1和bk2两者上。如果通过打开阀zav或fv的方式降低压力,则由于作用的压力差,两个连接的切换阀自动地打开,而无需对其进行专用的电动致动。
86.踏板运动借助于冗余踏板行程传感器(ps)来测量,该冗余踏板行程传感器(ps)还作用在根据wo2012/059175 a1的力
‑
行程传感器(kws)测量元件上。压力供应装置dv1由来自踏板行程传感器的信号控制,其中,活塞控制在制动回路bk1中的液压管线1中引起体积流并经由冗余阀bp1和bp2进入制动回路bk2中。制动主缸hz可以经由管线3连接至制动回路bk1或bk2,其中,为了关闭管线3而将阀fv布置在管线3中。此连接仅在后退级中有效。如果该管线连接至两个切换阀bp1和bp2的连接管线,则这两个阀bp1和bp2形成进一步冗余。在阀fv泄漏的情况下,从阀fv直接到两个制动回路bk1和bk2中的一者的常规连接会导致制动回路以及因此压力供应作用在主缸(hz)活塞上,这通常导致压力供应被关闭。
87.来自制动主缸和来自制动回路bk1和bk2的各种压力或压力水平作用在阀fv上。在最坏的情况下,例如在车载电气系统或开环和闭环回路控制单元ecu发生故障的情况下,这可能会导致在关闭的阀fv处存在不利的压差并且阀fv无法打开,使得压力降低p
降低
无法实现。为了防止这种情况,可以相对于阀fv并联连接另一切换阀,其中,阀的输出和输入以互换的方式连接至管线3,使得在存在任何压差的情况下,确保两个阀中的至少一者自动地打开,也就是说,由于该压差,即使没有通电,两个阀中的至少一者也可以自动地打开。此外,这有利地降低了阀上的背压。在阀fv发生故障或泄漏的情况下,行驶模拟器ws不会发生故障。
88.在轮缸中的制动回路发生故障的情况下,对应的入口阀ev或切换阀sv通常关闭,以便消除故障的轮回路。入口阀ev/切换阀sv泄漏(休眠故障)导致制动回路或整个压力供应发生故障。在此,阀bp2和bp1也提供附加的安全性,使得压力供应不会发生故障。由于不起作用的切换阀sv导致制动回路bk1发生故障意味着压力供应装置dv1发生故障,由此借助于另一压力供应装置dv2向所有的仍然起作用的轮制动器执行压力供应。
89.当启用压力供应时,总是借助于压力供应来执行压力升高。压力供应或中央出口阀zav可以借助于压力供应装置dv1用于闭环abs控制或用于压力降低。然后通过压力供应的活塞的向后运动或通过中央出口阀zav的pwm操作来执行压力降低。压力换能器的压力信号可以用于经由中央出口阀zav提高压力降低中的闭环控制质量。然而,作为中央排放阀
zav的替代性方案或除了中央排放阀zav外,同样可以为至少一个轮制动器设置出口阀av。出口阀av优选地在具有大容积的轮制动器、即前轮制动器处使用。因此,代替一个出口阀,也可以使用两个出口阀av(未示出)。此外,如标准abs系统中常见的,可以为每个制动回路提供出口阀av,使得该制动回路中的压力经由出口阀av被降低,并且同时借助于压力供应装置dv1在另一制动回路中升高/降低压力。在此,体积流另外地经由阀bp1或bp2经过,使得泄漏的中央出口阀zav对正常操作并不关键,因为在中央出口阀zav发生故障的情况下,借助于压力供应装置dv1来执行压力控制。此外,可以由中央出口阀zav从压力变化或压力供应装置dv1的体积输送增加中立即识别出故障、甚至休眠。为了极端的安全性要求,另一冗余排放阀可以与出口阀zav串联连接。
90.在制动主缸hz和行程模拟器ws中发生故障通常是由密封件引起。在制动主缸hz的情况下,可以在通向储存器vb的返回管线中使用具有节流阀的附加密封件d3,以便能够在早期时间点诊断出密封件的故障。因此可以借助于踏板行程传感器从小的附加踏板运动中识别出泄漏。在sad和fad的情况下必须考虑低负载。
91.在许多系统中,为了诊断密封件,当断电时打开的电磁阀结合在返回管线中,出于诊断目的关闭电磁阀。在这种情况下,压力从压力供应装置dv1经由阀pd1、bp1和ev被传导到制动主缸hz中。通过在恒定活塞位置处的压力变化或在恒定压力下活塞位置中的变化的方式来执行诊断。作为替代性方案,也可以使用节流阀和止回阀的组合来节省成本。节流阀定尺寸使得通过密封件的泄漏流仅导致踏板在近似10秒的正常制动时间内的轻微延长。
92.在具有冗余密封件的行程模拟器的ws活塞的情况下,也使用相同的解决方案,如以上对于密封件d3那样,通过踏板运动的方式进行诊断。此外,即使这些密封件发生故障,也可以控制制动助力,尽管踏板特性有所改变。在此,两个密封件发生故障的故障率也非常低,几乎在<10
‑
10
/年的范围内。压力供应装置dv1也可以配备有冗余密封件,如以上在制动主缸hz的情况下所描述的那样,压力供应装置dv1配备有密封件d6、配备有位于在密封件d6与密封件d5之间的节流阀。如果吸入阀直接地连接至阀pd1上的连接件上,则随着活塞的返回行程立即开始吸入,其优点在于:即使在低温下也能提供高吸力。在极限情况下,切换阀sv的故障或泄漏导致压力供应件dv的故障。折衷方案是在行程的近似60%处连接切换阀sv,这意味着行程的40%是可能的而不存在切换阀sv泄漏的影响,并且同时可以在正常温度范围内进行抽吸动作。在上述小的局限下,通过冗余确保了活塞的体积输送。此外,马达可以借助于冗余的2x3相绕组控制,使得压力供应装置dv仅由于滚珠丝杠驱动器kgt阻塞才会发生故障。
93.如在wo 2006/111393 a1中所述,abs功能借助于多路复用操作mux和压力供应装置dv1实现。由中央排放阀zav引起mux功能扩展。如果在制动回路bk1中的压力升高p
升高
期间,必须同时在另一制动回路bk2中进行压力降低p
降低
,这借助于中央排放阀zav以及同时关闭的阀bp1来执行。以此方式,多路复用系统mux仅通过制动回路bk1中的两个轮制动器rb1、rb2承受负载,也就是说压力升高p
升高
和压力降低p
降低
不能在制动回路bk1的轮制动器rb1和rb2中同时发生。替代性地,相应的制动回路中的排放阀av1、av2可以用于压力降低p
降低
的目的,以便减轻mux的负载。在此,排放阀av可以布置或连接在切换阀sv与连接的切换阀bp1、bp2之间或者布置或连接在轮制动器与相关联的切换阀sv之间,使得直接的压力降低p
降低
可以通过经由排放阀消散至储存器vb而发生。这特别地对于前轮中的压力降低p
降低
是有利的。
在该替代性方案中不需要中央排放阀zav。
94.另外在abs情况下,闭环压力控制对上述mux操作来说是典型的,闭环压力控制借助于体积测量并且借助于压力供应装置dv1的活塞运动进行,还考虑压力
‑
体积特性曲线(p
‑
v特性曲线)。测量体积对于压力升高也是可能的。在此,在压力升高p
升高
的情况下,在各个轮制动器中一系列和非同时的压力升高p
升高
是有利的。在此,必须考虑阀的尺寸和阀上的背压,特别是在阀bp1和bp2的情况下,在轮回路中快速压力升高的情况下。上述阀的背压用作制动回路bk1与bk2之间的压差。
95.开环和闭环控制装置ecu是整个系统和封装的组成部分。故障安全功能需要冗余或部分冗余的ecu。除了冗余ecu之外,该部分冗余的ecu还可以用于特定功能。在任何情况下,阀是或应该借助于单独的阀驱动器和隔离开关来冗余地驱动,这会使故障的阀驱动器关闭。
96.冗余的车载电气系统连接对于开环和闭环控制装置ecu的冗余也是必需的。具有48v的连接也可以用于马达的连接。48v的优点在于更高的动态。在压力供应装置dv1的马达于48v下发生故障的情况下,以12v和约50%的功率实现了紧急操作,减少了动力并节省了成本。为此,马达配置必须为例如24v。
97.压力换能器dg优选地在制动回路bk2中使用并且也可以在制动回路bk1中使用。在压力换能器发生故障的情况下,可以通过测量马达的电流来执行闭环压力控制并且使用p
‑
v特性来执行活塞的位置控制。
98.压力换能器dg1可以如图5中所示布置。然而,该压力换能器dg1也可以替代地被使用虚线图示的两个压力换能器dg2、dg3中的一者替代或补充。压力换能器dg2应该有利地用于测量连接管线vl中的压力。以此方式,可以有利的是,在制动回路bk2中的压力降低p
降低
期间,如果压力供应装置dv1例如借助于多路复用方法在制动回路bk1中执行闭环压力控制,则压力可以通过出口阀av和压力换能器dg2的方式控制。
99.如果使用两个压力供应装置dv1和dv2,则制动回路bk2中的压力变化可以在两个连接阀bp1和bp2关闭的情况下借助于压力换能器dg2和直接连接至管线5的第二压力供应装置dv2来控制。压力供应装置dv1然后例如通过体积和电流测量的方式来执行控制。例如,每当压力供应装置dv1在制动回路bk1和bk2中执行压力变化时,都可以执行校准。
100.图6和图6a中所示的实施方式相对于图5中所示的实施方式略有修改。
101.在根据图6的实施方式中,隔离阀tvbk1布置在管线4中,以便制动回路可以单独地再次与压力供应装置dv1隔离。
102.图6a示出了具有2
‑
回路双作用活塞的应用,该活塞的前进行程经由阀v1馈入制动回路bk1,并且返回行程经由阀2馈入制动回路bk2。双作用活塞dhk的两个回路可以经由阀bp1和bp2馈入到各个另一制动回路bk中。如从wo2016/023994 a1和wo2016/023995 a1已知,对于p
降低
,双作用活塞dhk的体积必须经由阀v3和阀v4排放到储存器vb中。
103.图7是具有在前车轴va处的轮制动器rb1和rb2以及在后车轴处的轮制动器rb3和rb4的制动系统的可能实施方式的示意性图示,其中,提供有用于驱动后车轴ha的电动驱动器马达em。
104.制动系统仅具有一个压力供应装置dv1、一个执行装置be和一个上级开环和闭环控制单元m
‑
ecu。压力供应装置dv1具有两个相互独立的开环和闭环控制单元dv
‑
ecu1和dv
‑
ecu2,开环和闭环控制单元dv
‑
ecu1和dv
‑
ecu2中的每一者各自控制压力供应装置dv1的驱动马达的两个绕组或相系统中的一者,在此开环和闭环控制单元dv
‑
ecu1和dv
‑
ecu2由三相系统形成。另外,可以设置有冗余信号管线ds1和ds2。
105.切换阀设置成用于压力供应装置dv1与轮制动器的连接和隔离。虚线表示将控制单元m
‑
ecu连接至制动系统的部件的信号传输管线。
106.牵引马达em与控制单元m
‑
ecu通信并且可以用于对后轴va进行驱动以及制动。
107.具有由开环和闭环控制装置dv
‑
ecu控制的电动驱动器m1的压力供应装置dv1用于在液压作用的轮制动器rb1至rb4中进行压力升高。另外,压力供给装置dv1还可以具有马达电流测量装置i/u、至少一个温度传感器t/u和转子角度变换器α/u,以上者的信号可以用于闭环压力控制。马达m1经由主轴驱动器驱动活塞kb,该活塞kb以可移位的方式安装在压力供应装置dv1的缸中并且界定压力室以便升高、保持或降低该压力室中的压力。压力室经由液压管线连接至隔离阀tv1、tv2。由于在压力供应装置dv1上游连接的两个隔离阀,制动回路故障不会导致制动系统的完全故障。在制动回路bk1发生故障的情况下,借助于压力供应和电动马达em仍然可以在制动回路bk2中产生制动力。如果制动回路bk2发生故障,可以通过驾驶员或压力供应装置dv1借助于致动单元在制动回路bk1(前车轴)中产生制动力。以此方式,即使在制动回路发生故障的情况下,也可以满足对最小减速的法律要求。由于压力供应是进一步的冗余配置,因此可以实现高级别的可用性。残余风险在于主轴驱动器的卡住,该主轴驱动器必须借助于对应的质量措施来保护。液压管线中的压力可以借助于压力换能器p/u来确定。闭环压力控制也可以在压力换能器p/u的帮助下进行。闭环压力控制也可以通过借助于马达电流测量装置i/u和角度变换器α/u以及存储的压力
‑
体积特性曲线的电流测量的方式来执行,因为马达扭矩与压力室中的压力成正比并且也与马达电流i成正比。马达m1具有带2x3相的两个相互分开的绕组系统。相的数目可以根据各自的要求不言而喻地改变。如果一个绕组系统发生故障,马达m1仍然可以以降低的功率运行。这已经产生了大量冗余。开环和闭环控制装置dv
‑
ecu同样可以具有冗余配置,使得例如可以各自设置有一个独立的开环和闭环控制装置dv
‑
ecu1和dv
‑
ecu2,开环和闭环控制装置dv
‑
ecu1和dv
‑
ecu2各自控制马达m1的一个相系统。因此,即使在一个开环和闭环控制装置dv
‑
ecu1或dv
‑
ecu2发生故障的情况下,制动系统仍然可以安全地运行。
108.借助于隔离阀tv1、tv2,压力供应装置dv1可以选择性地连接至液压管线hl6或第一制动回路bk1或者与液压管线hl6或第一制动回路bk1隔离。连接至轮制动器的液压管线hl1和hl2可以借助于切换阀sv1和sv2选择性地连接至液压管线hl6。如果现在要在前车轴va的轮制动器rb1中升高压力,这经由打开的阀tv和sv1来执行,其中,阀av1、sv2和fv关闭,并且活塞kb借助于马达m1来调节。对于轮制动器rb1中的压力降低,活塞kb可以利用相同的阀切换配置向后移动,或者另外打开出口阀av1,由此储存器vb中的压力可以通过消散到轮制动器rb1中来降低。轮制动器rb2中的压力升高类似地发生。轮制动器rb1和rb2中的压力也可以不言而喻地同时升高和降低。还可以借助于压力供应装置dv1在一个轮制动器中升高压力,并且同时经由相关联的出口阀av在另一轮制动器中进行压力降低。在仅于第二制动回路bk2的轮制动器rb3和rb4中进行压力升高的情况下,必须关闭隔离阀tv和/或切换阀sv1和sv2,并且必须打开相应的切换阀sv3或sv3。如果压力供应装置dv1发生故障,则可以借助于致动装置be在一个或两个制动回路中进行压力升高。为此,致动装置be具有制动踏
板,该制动踏板作用在界定压力室的活塞上,其中,活塞然后迫使液压介质离开压力室进入制动回路中,由此制动压力在轮制动器中的一个轮制动器或所有轮制动器中升高。为此,切换阀优选地被设计为在断电时打开的阀。
109.图8示出了其中与图7相比仅设置有一个隔离阀tv1的另一可能变型,该隔离阀tv1布置在压力供应装置dv1的壳体中。另外,在后车轴ha处设置有电动驻车制动器epb作为在发生故障的情况下产生制动扭矩的另一选项。在压力供应装置dv1发生故障的情况下,可以借助于制动主缸hz经由阀fv在两个制动回路bk1和bk2中的轮制动器rb1至rb4中进行压力升高,该阀fv在断电时打开。如果一个轮回路发生故障,则分配给泄漏处的相应切换阀必须操作成是关闭的,以便于这不会导致制动系统的完全故障。
110.图9示出了一种同样仅设置有一个隔离阀tv1的变型,使得与图8中的变型相比,如果压力供应装置dv1发生故障,则仅借助于制动主缸hz在前车轴va的制动回路中进行压力升高。在该变型中,隔离阀容纳在阀组件hcu中。与图8相比,压力供应的故障不是太关键,因为在压力供应装置dv1发生故障的情况下,在制动回路bk2中可以使用电动牵引马达em,并且在制动回路bk1中可以使用具有制动主缸hz的制动单元。
111.图10示出了一种未在一个车轴处布置有电动马达并且仅设置有一个隔离阀tv1的变型。因此,如在图9的变型中,在紧急情况下,仅在前车轴va的制动回路bk1中借助于制动主缸hz而在轮制动器rb1和rb2中进行压力升高,因为隔离阀tv1在这种情况下关闭以便将压力供应装置dv1与制动回路断开联接。为了也可以提供abs和/或esp功能,在后车轴ha的轮制动器rb4处设置有附加的出口阀av1,经由该附加的出口阀,轮制动器rb4中的压力可以通过直接耗散到储存器vb中来降低。
112.图11a和图11b示出了切换阀sv的有利连接,该有利连接确保在压力被封闭于轮制动器中的情况下切换阀sv可靠地打开。为此,切换阀及其分配给阀座的连接与轮制动器的工作室连接,使得封闭在轮制动器中的压力推动阀控制元件远离切换阀sv的阀座。图11a示出了分配给轮制动器的出口阀av1和av2的黑/白布置结构,并且图11b示出了分配给轮制动器的出口阀av1和av2的对角线布置结构。
113.附图标记列表
114.hz
ꢀꢀꢀꢀꢀ
制动主缸(单个)
115.a
hz
ꢀꢀꢀꢀ
制动主缸的主轴线
116.a
dv1
ꢀꢀꢀ
第一压力供应装置dv1的轴线
117.a1
dv2
ꢀꢀ
第二压力供应装置dv2的轴线垂直于第一压力供应装置dv1的轴线a
dv1
的水平取向
118.a2
dv2
ꢀꢀ
第二压力供应装置dv2的轴线垂直于第一压力供应装置dv1的轴线a
dv1
的竖向取向
119.dv
ꢀꢀꢀꢀꢀ
压力供应件
120.hcu
ꢀꢀꢀꢀ
液压控制单元
121.ecu
ꢀꢀꢀꢀ
电子计算单元
122.ecu
‑
v
ꢀꢀ
ecu的前侧部
123.ecu
‑
s
ꢀꢀ
ecu的侧壁
124.ecu
‑
o
ꢀꢀ
ecu的顶侧部
125.ecu
‑
h
ꢀꢀ
ecu的面向车辆的隔板的后侧部
126.em
ꢀꢀꢀꢀ
电动驱动器马达
127.pi
ꢀꢀꢀꢀ
踏板接合部
128.sw/h
ꢀꢀ
隔板/支架
129.st
ꢀꢀꢀꢀ
插塞连接器
130.bkv
ꢀꢀꢀ
制动力助力器
131.ns
ꢀꢀꢀꢀ
液位传感器
132.rz
ꢀꢀꢀꢀ
轮缸
133.mv
ꢀꢀꢀꢀ
电磁阀
134.dr
ꢀꢀꢀꢀ
节流阀
135.sv
ꢀꢀꢀꢀ
压力供应装置dv1的吸入阀
136.a
ꢀꢀꢀꢀꢀ
用于液压控制单元hcu和压力供应装置dv1以及可选的压力供应装置dv2的壳体
137.a1
ꢀꢀꢀꢀ
用于hcu和压力供应装置dv2的部分壳体
138.a2
ꢀꢀꢀꢀ
用于压力供应装置dv1的部分壳体
139.b
ꢀꢀꢀꢀꢀ
用于ecu的壳体
140.c
ꢀꢀꢀꢀꢀ
用于制动主缸hz和行程模拟器ws的具有凸缘的壳体
141.a
dv1
ꢀꢀ
压力供应装置dv1的马达轴线
142.a
dv2
ꢀꢀ
压力供应装置dv2的马达轴线
143.a
hz
ꢀꢀꢀ
制动主缸hz的纵向轴线
144.vb
ꢀꢀꢀꢀ
储存器
145.vb
h
ꢀꢀꢀ
储存器的后部区域
146.vb
m
ꢀꢀꢀ
储存器的中央区域
147.vb
v
ꢀꢀꢀ
储存器的前部区域
148.va
ꢀꢀꢀꢀ
前车轴
149.ha
ꢀꢀꢀꢀ
后车轴
[0150]1ꢀꢀꢀꢀꢀ
踏板柱塞
[0151]2ꢀꢀꢀꢀꢀ
马达
[0152]3ꢀꢀꢀꢀꢀꢀ
中间壳体
[0153]4ꢀꢀꢀꢀꢀꢀ
紧固螺钉
[0154]5ꢀꢀꢀꢀꢀꢀ
传感器壳体
[0155]6ꢀꢀꢀꢀꢀꢀ
旋转角度传感器
[0156]7ꢀꢀꢀꢀꢀꢀ
封闭盖
[0157]8ꢀꢀꢀꢀꢀꢀ
活塞
[0158]
9a/9b
ꢀꢀ
连接至储存器vb的连接件
[0159]
10
ꢀꢀꢀꢀꢀ
连接至轮缸rz的连接件
[0160]
11
ꢀꢀꢀꢀꢀ
连接至制动主缸hz的连接件
[0161]
12
ꢀꢀꢀꢀꢀ
制动主缸hz的凸缘
[0162]
13
ꢀꢀꢀꢀꢀ
紧固螺钉
[0163]
14
ꢀꢀꢀꢀꢀ
用于隔板或支架的紧固螺钉
[0164]
15
ꢀꢀꢀꢀꢀ
压力供应装置dv2马达与电子计算单元ecu之间的电连接
[0165]
16
ꢀꢀꢀꢀꢀ
压力供应装置dv1马达的电连接
[0166]
17
ꢀꢀꢀꢀꢀ
旋转角度传感器的角度的电连接
[0167]
18
ꢀꢀꢀꢀꢀ
ecu壳体
[0168]
19
ꢀꢀꢀꢀꢀ
具有密封件的腹板
[0169]
20
ꢀꢀꢀꢀꢀ
用于电磁阀mv的驱动器
[0170]
21
ꢀꢀꢀꢀꢀ
电磁阀mv的连接腹板
[0171]
22
ꢀꢀꢀꢀꢀ
小型pcb
[0172]
22a
ꢀꢀꢀꢀ
电子控制单元ecu的主pcb与pcb 22的电连接
[0173]
23
ꢀꢀꢀꢀꢀ
主pcb
[0174]
24
ꢀꢀꢀꢀꢀ
hcu块状件
[0175]
25
ꢀꢀꢀꢀꢀ
用于偏心活塞泵dv2的孔
[0176]
26
ꢀꢀꢀꢀꢀ
用于压力供应装置dv2的马达
[0177]
27
ꢀꢀꢀꢀꢀ
真空制动力助力器bkv的外形轮廓8”[0178]
28
ꢀꢀꢀꢀꢀ
用于活塞的止挡环
[0179]
29
ꢀꢀꢀꢀꢀ
连接至储存器vb的管线
[0180]
30
ꢀꢀꢀꢀꢀ
力
‑
行程传感器kws
[0181]
31/31a 踏板杆
[0182]
32
ꢀꢀꢀꢀꢀ
弹簧壳体
[0183]
33
ꢀꢀꢀꢀꢀ
制动主缸(hz)活塞
[0184]
34
ꢀꢀꢀꢀꢀ
传感器元件
[0185]
35
ꢀꢀꢀꢀꢀ
目标
[0186]
36
ꢀꢀꢀꢀꢀ
驱动轴
[0187]
37
ꢀꢀꢀꢀꢀ
齿轮
[0188]
38
ꢀꢀꢀꢀꢀ
齿条
[0189]
39
ꢀꢀꢀꢀꢀ
导引部分
[0190]
40
ꢀꢀꢀꢀꢀ
导引导轨
[0191]
41
ꢀꢀꢀꢀꢀ
目标
[0192]
42
ꢀꢀꢀꢀꢀ
感应传感器
[0193]
43
ꢀꢀꢀꢀꢀ
制动主缸(hz)壳体
[0194]
44
ꢀꢀꢀꢀꢀ
行程传感器(ws)活塞
[0195]
44a
ꢀꢀꢀꢀ
行程传感器(ws)弹簧
[0196]
45
ꢀꢀꢀꢀꢀ
行程传感器(ws)密封件
[0197]
46
ꢀꢀꢀꢀꢀ
滑动环
[0198]
47
ꢀꢀꢀꢀꢀ
连接孔行程传感器(ws)
‑
制动主缸(hz)和hcu块状件24
[0199]
48
ꢀꢀꢀꢀꢀ
滑动环
[0200]
49
ꢀꢀꢀꢀꢀ
支承部件
[0201]
50
ꢀꢀꢀꢀꢀ
复位弹簧
[0202]
51
ꢀꢀꢀꢀꢀ
具有压配合触点的插塞连接器条
[0203]
52
ꢀꢀꢀꢀꢀ
传感器壳体1
[0204]
52a
ꢀꢀꢀꢀ
传感器壳体2
[0205]
53
ꢀꢀꢀꢀꢀ
测量凸缘
[0206]
54
ꢀꢀꢀꢀꢀ
封闭插塞
[0207]
55
ꢀꢀꢀꢀꢀ
传感器壳体的紧固件
[0208]
56
ꢀꢀꢀꢀꢀ
螺纹螺母
[0209]
57
ꢀꢀꢀꢀꢀ
螺纹主轴
[0210]
58
ꢀꢀꢀꢀꢀ
滚珠丝杆驱动器kgt
[0211]
59
ꢀꢀꢀꢀꢀ
活塞
[0212]
60
ꢀꢀꢀꢀꢀ
马达与ecu的接触
[0213]
61
ꢀꢀꢀꢀꢀ
壳体密封件
[0214]
62
ꢀꢀꢀꢀꢀ
马达壳体
[0215]
63
ꢀꢀꢀꢀꢀ
马达轴承
[0216]
64
ꢀꢀꢀꢀꢀ
转子
[0217]
100
ꢀꢀꢀꢀ
储存器的开口
[0218]
101
ꢀꢀꢀꢀ
储存器的封闭盖
[0219]
152
ꢀꢀꢀꢀ
可封闭的开口
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。