1.本技术涉及无人机技术领域,具体而言,涉及一种矢量控制垂直起降无人机。
背景技术:
2.无人机即无人驾驶飞机,采用遥控或自主程序驾驶的方式飞行。目前,由于无人飞机体积小、造价低且无人员损伤风险,因此采用无人飞机平台来代替有人飞机执行一些侦查、测绘、通讯等军事、民用任务的趋势越来越明显。
3.现今无人机大多数采取常规布局固定翼水平起落方式,虽然载荷较大,但受到机场的限制,只能在有限地域起降。还有一部分飞机为避免机场的限制采用了弹射起飞、垂直伞降。
4.垂直起落由于无需专用机场,具有常规固定翼飞机不可替代的优点,但由于垂直起飞状态功率载荷较固定翼飞机明显偏低,故载荷小,油耗大,水平飞行速度低,特别是现今流行的多轴飞行器大多只能点服务,明显制约其发展。
技术实现要素:
5.本技术实施例的目的在于提供一种矢量控制垂直起降无人机,以实现无人机的垂直起降。
6.为了实现上述目的,本技术的实施例通过如下方式实现:
7.第一方面,本技术实施例提供一种矢量控制垂直起降无人机,包括机身、能源部、动力部、主升力翼、主螺旋桨、矢量姿态控制螺旋桨和垂直起落架,所述能源部,设置在所述机身内,用于提供能源;所述动力部,设置在所述机身内,用于提供动力;所述主升力翼,对称设置在所述机身两侧;偶数个所述主螺旋桨,分别设置在所述机身两侧的主升力翼处,且所述主螺旋桨的旋转轴与所述机身的长度方向平行;所述矢量姿态控制螺旋桨,设置在所述机身的头部,且所述矢量姿态控制螺旋桨的旋转轴的朝向可调节,以及,所述矢量姿态控制螺旋桨处于初始状态时,其旋转轴与所述机身的长度方向平行;所述垂直起落架,设置在所述机身上,且所述矢量控制垂直起降无人机垂直起降时,所述垂直起落架与起降点的地面接触,以使所述矢量控制垂直起降无人机矗立于起降点的地面上,且所述机身的头部朝向天空。
8.在本技术实施例中,能源部设置在机身内,用于提供能源;动力部设置在机身内,用于提供动力;主升力翼对称设置在机身两侧;偶数个主螺旋桨分别设置在机身两侧的主升力翼处,且主螺旋桨的旋转轴与机身的长度方向平行;矢量姿态控制螺旋桨设置在机身的头部,且其旋转轴的朝向可调节,以及,矢量姿态控制螺旋桨处于初始状态时,其旋转轴与机身的长度方向平行。垂直起落架设置在机身上,且矢量控制垂直起降无人机垂直起降时,垂直起落架与起降点的地面接触,以使矢量控制垂直起降无人机矗立于起降点的地面上,且机身的头部朝向天空。通过这样的方式,可以实现无人机的垂直起降,并且头部设有矢量姿态控制螺旋桨,在无人机起飞和落地过程中处于最大拉力状态,抗风能力强。由于头
部可调角度的矢量姿态控制螺旋桨提供的拉力形成的“悬吊”作用和所具有方向调整功能,使得整机具有在运动的舰艇、汽车上起落的能力。因此,这样能够可靠地实现无人机的垂直起降。
9.结合第一方面,在第一方面的第一种可能的实现方式中,所述矢量姿态控制螺旋桨由两个控制舵机进行控制,以调节所述矢量姿态控制螺旋桨的旋转轴与机身的长度方向之间的夹角。
10.在该实现方式中,矢量姿态控制螺旋桨由两个控制舵机进行控制,可以调节矢量姿态控制螺旋桨的旋转轴与机身的长度方向之间的夹角,这样能够在无人机垂直起降时,起到引导作用,以及,在无人机飞行过程中,进行无人机的方向控制。
11.结合第一方面,在第一方面的第二种可能的实现方式中,所述能源部包括电源和油箱,对应的,所述动力部为油电混合动力装置。
12.在该实现方式中,能源部包括电源和油箱,相当于在无人机上增加一个副油箱,这就使得无人机可以持续飞行更长时间。并且,可以根据需要设置油箱的位置,使得无人机的重心在油箱设置处。
13.结合第一方面,在第一方面的第三种可能的实现方式中,所述矢量控制垂直起降无人机还包括水平滑跑起落架,所述水平滑跑起落架包括前轮和后轮;所述前轮设置在所述机身的头部的腹侧;所述后轮设置在所述机身的尾部的腹侧。
14.在该实现方式中,在矢量控制垂直起降无人机底部设置水平滑跑起落架,可以在机场满足滑跑起飞的条件时,采用滑跑起飞的方式起飞。当载荷大于垂直起降能力时,液可以采用水平短距起飞降落的模式。
15.结合第一方面的第三种可能的实现方式,在第一方面的第四种可能的实现方式中,所述水平滑跑起落架还包括防触地支架,所述矢量控制垂直起降无人机在水平滑跑起降时,所述防触地支架朝向地面,且所述防触地支架的端部设有滚轮,所述滚轮与地面之间的相对高度低于所述主螺旋桨的叶片末端与地面之间的相对高度。
16.在该实现方式中,通过设置防触地支架,可以在无人机的前轮或后轮失效时,抵持在地面,完成无人机的水平起降。由于防触地支架的端部设置的滚轮与地面之间的相对高度低于主螺旋桨的叶片末端与地面之间的相对高度,这样还能够保护主螺旋桨,防止主螺旋桨触地。
17.结合第一方面的第三种可能的实现方式,在第一方面的第五种可能的实现方式中,所述垂直起落架包括两个支杆,两个支杆对称设置于机身的两侧,所述矢量控制垂直起降无人机垂直起降时,每个支杆的底部与所述后轮的外沿均与地面接触,以支撑所述矢量控制垂直起降无人机矗立于地面。
18.在该实现方式中,垂直起落架包括两个支杆,两个支杆对称设置于机身的两侧,矢量控制垂直起降无人机垂直起降时,每个支杆的底部与地面接触,以支撑矢量控制垂直起降无人机矗立于地面。并且,后轮的外沿也与地面接触,起到支撑作用,可以保证无人机位于垂直起降姿态时的稳定性。
19.结合第一方面的第五种可能的实现方式,在第一方面的第六种可能的实现方式中,每个支杆上设有燃气助推套管。
20.在该实现方式中,每个支杆上设有燃气助推套管,可以实现无人机的内燃助推超
载垂直起飞。
21.结合第一方面,在第一方面的第七种可能的实现方式中,所述矢量控制垂直起降无人机还包括固定鸭翼,所述固定鸭翼对称设置在所述机身的两侧,且位于所述主升力翼与所述机身的头部之间。
22.在该实现方式中,固定式鸭翼和机身下部融合,可共同提供升力,减小了平飞的翼载荷,增大了升阻比,用以节能。
23.结合第一方面,在第一方面的第八种可能的实现方式中,所述矢量控制垂直起降无人机还包括垂直尾舵,所述垂直尾舵垂直设置在所述机身尾部的背侧,以及,在所述矢量控制垂直起降无人机垂直起降时,所述垂直尾舵支撑于地面上。
24.在该实现方式中,垂直尾舵垂直设置在机身尾部的背侧,以及,在矢量控制垂直起降无人机垂直起降时,垂直尾舵支撑于地面上。垂直尾翼完全是固定翼面,兼做垂直落地时的支撑架,能够进一步保证无人机处于垂直起降姿态的稳定性。
25.结合第一方面的第八种可能的实现方式,在第一方面的第九种可能的实现方式中,所述矢量控制垂直起降无人机还包括两个升降舵,两个升降舵对称设置在所述机身的尾部的两侧,由一个控制舵机控制两个升降舵与水平面的夹角。
26.在该实现方式中,矢量控制垂直起降无人机还包括两个升降舵,两个升降舵对称设置在所述机身的尾部的两侧,由一个控制舵机控制两个升降舵与水平面的夹角。因此,矢量控制垂直起降无人机只有两个能动的水平舵面(一个是头部的矢量姿态控制螺旋桨所在舵面,另一个是升降舵所在舵面),能够使得无人机操作方便,结构简单可靠,具有更强的可靠性。
27.为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
28.为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
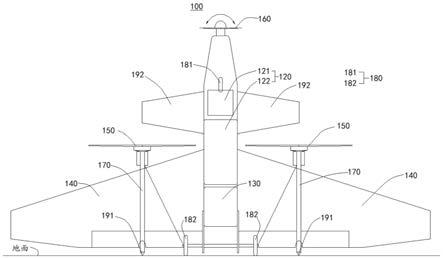
29.图1为本技术实施例提供的一种矢量控制垂直起降无人机在正面视角下的示意图。
30.图2为本技术实施例提供的一种矢量控制垂直起降无人机处于水平滑跑起飞姿态的示意图。
31.图3为本技术实施例提供的一种矢量控制垂直起降无人机处于垂直起降姿态的示意图。
32.图标:100
‑
矢量控制垂直起降无人机;110
‑
机身;120
‑
能源部;121
‑
电源;122
‑
油箱;130
‑
动力部;140
‑
主升力翼;150
‑
主螺旋桨;160
‑
矢量姿态控制螺旋桨;170
‑
垂直起落架;180
‑
水平滑跑起落架;181
‑
前轮;182
‑
后轮;183
‑
防触地支架;191
‑
燃气助推套管;192
‑
固定鸭翼;193
‑
垂直尾舵。
具体实施方式
33.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述。
34.请参阅图1至图3,图1为本技术实施例提供的一种矢量控制垂直起降无人机100在正面视角下的示意图;图2为本技术实施例提供的一种矢量控制垂直起降无人机100处于水平滑跑起飞姿态的示意图;图3为本技术实施例提供的一种矢量控制垂直起降无人机100处于垂直起降姿态的示意图。
35.在本实施例中,矢量控制垂直起降无人机100可以包括机身110、能源部120、动力部130、主升力翼140、主螺旋桨150、矢量姿态控制螺旋桨160和垂直起落架170。
36.示例性的,能源部120可以设置在机身110内,用于提供能源。例如,能源部120可以设置在机身110内部,位于机身110的头部和尾部之间的空间内。
37.示例性的,动力部130可以设置在机身110内,用于提供动力。例如,动力部130可以设置在机身110内,邻近能源部120。
38.示例性的,主升力翼140可以对称设置在机身110两侧,主要用于为无人机的飞行提供升力。
39.示例性的,主螺旋桨150为偶数个(例如两个、四个等),分别设置在机身110两侧的主升力翼140处,且主螺旋桨150的旋转轴与机身110的长度方向平行。主螺旋桨150主要用于为无人机的飞行提供动力。
40.示例性的,矢量姿态控制螺旋桨160可以设置在机身110的头部,且矢量姿态控制螺旋桨160的旋转轴的朝向可调节,以及,矢量姿态控制螺旋桨160处于初始状态时,其旋转轴与机身110的长度方向平行。矢量姿态控制螺旋桨160一方面可以为无人机的飞行提供动力,另一方面,还可以同于调节无人机的飞行方向,调节无人机的姿态等。
41.示例性的,垂直起落架170可以设置在机身110上,且矢量控制垂直起降无人机100垂直起降时,垂直起落架170与起降点的地面接触,以使矢量控制垂直起降无人机100矗立于起降点的地面上,且机身110的头部朝向天空。
42.通过这样的方式,可以实现无人机的垂直起降,并且头部设有矢量姿态控制螺旋桨160,在无人机起飞和落地过程中处于最大拉力状态,抗风能力强。由于头部可调角度的矢量姿态控制螺旋桨160提供的拉力形成的“悬吊”作用和所具有方向调整功能,使得整机具有在运动的舰艇、汽车上起落的能力。因此,这样能够可靠地实现无人机的垂直起降。
43.在本实施例中,矢量姿态控制螺旋桨160可以由两个控制舵机进行控制(两个舵机调节不同的方向),以调节矢量姿态控制螺旋桨160的旋转轴与机身110的长度方向之间的夹角。这样能够在无人机垂直起降时,起到引导作用,以及,在无人机飞行过程中,实现无人机的方向控制、无人机的姿态控制等。
44.在本实施例中,能源部120可以包括电源121和油箱122,对应的,动力部130为油电混合动力装置。例如,电源121可以为电池,设置在无人机的腹部,且靠近无人机的头部,而油箱122则可以设置在电源121和无人机的尾部之间,例如,油箱122可以邻近电源121进行设置。这样相当于在无人机上增加一个副油箱122,这就使得无人机可以持续飞行更长时间。并且,可以根据需要设置油箱122的位置,使得无人机的重心在油箱122设置处。
45.在本实施例中,矢量控制垂直起降无人机100还包括水平滑跑起落架180,水平滑跑起落架180包括前轮181和后轮182;前轮181设置在机身110的头部的腹侧;后轮182设置
在机身110的尾部的腹侧。
46.在矢量控制垂直起降无人机100底部设置水平滑跑起落架180,可以在机场满足滑跑起飞的条件时,采用滑跑起飞的方式起飞。当载荷大于垂直起降能力时,液可以采用水平短距起飞降落的模式。
47.在本实施例中,水平滑跑起落架180还包括防触地支架183,矢量控制垂直起降无人机100在水平滑跑起降时,防触地支架183朝向地面,且防触地支架183的端部设有滚轮,滚轮与地面之间的相对高度低于主螺旋桨150的叶片末端与地面之间的相对高度。
48.通过设置防触地支架183,可以在无人机的前轮181或后轮182失效时,抵持在地面,完成无人机的水平起降。由于防触地支架183的端部设置的滚轮与地面之间的相对高度低于主螺旋桨150的叶片末端与地面之间的相对高度,这样还能够保护主螺旋桨150,防止主螺旋桨150触地。
49.在本实施例中,垂直起落架170包括两个支杆,两个支杆对称设置于机身110的两侧,矢量控制垂直起降无人机100垂直起降时,每个支杆的底部与后轮182的外沿均与地面接触,以支撑矢量控制垂直起降无人机100矗立于地面。因此,支杆和后轮182均可起到支撑作用,从而进一步保证无人机位于垂直起降姿态时的稳定性。
50.在本实施例中,每个支杆上设有燃气助推套管191。例如,燃气助推套管191可以设置在支杆的尾部,这样有利于实现无人机的内燃助推超载垂直起飞。
51.在本实施例中,矢量控制垂直起降无人机100还包括固定鸭翼192,固定鸭翼192对称设置在机身110的两侧,且位于主升力翼140与机身110的头部之间。例如,固定鸭翼192的型号可以为naca23010。固定鸭翼192和机身110下部融合,可共同提供升力,减小了平飞的翼载荷,增大了升阻比,用以节能。
52.在本实施例中,矢量控制垂直起降无人机100还包括垂直尾舵193,垂直尾舵193垂直设置在机身110尾部的背侧,以及,在矢量控制垂直起降无人机100垂直起降时,垂直尾舵193支撑于地面上。垂直尾翼为固定翼面,兼做垂直落地时的支撑架,能够进一步保证无人机处于垂直起降姿态的稳定性。
53.在本实施例中,矢量控制垂直起降无人机100还包括两个升降舵,两个升降舵对称设置在机身110的尾部的两侧,由一个控制舵机控制两个升降舵与水平面的夹角。
54.因此,矢量控制垂直起降无人机100只有两个能动的水平舵面(一个是头部的矢量姿态控制螺旋桨160所在舵面,另一个是升降舵所在舵面),能够使得无人机操作方便,结构简单可靠,具有更强的可靠性。
55.另外,此矢量控制垂直起降无人机100还可以实现网降功能,在舰船或汽车等降落平台上,顺着降落平台运动方向,在平台上设置扇形降落网,实现撞网降落。以及,此矢量控制垂直起降无人机100还可以实现弹射起飞,此处不作限定。
56.综上所述,本技术实施例提供一种矢量控制垂直起降无人机100,能源部120设置在机身110内,用于提供能源;动力部130设置在机身110内,用于提供动力;主升力翼140对称设置在机身110两侧;偶数个主螺旋桨150分别设置在机身110两侧的主升力翼140处,且主螺旋桨150的旋转轴与机身110的长度方向平行;矢量姿态控制螺旋桨160设置在机身110的头部,且其旋转轴的朝向可调节,以及,矢量姿态控制螺旋桨160处于初始状态时,其旋转轴与机身110的长度方向平行。垂直起落架170设置在机身110上,且矢量控制垂直起降无人
机100垂直起降时,垂直起落架170与起降点的地面接触,以使矢量控制垂直起降无人机100矗立于起降点的地面上,且机身110的头部朝向天空。通过这样的方式,可以实现无人机的垂直起降,并且头部设有矢量姿态控制螺旋桨160,在无人机起飞和落地过程中处于最大拉力状态,抗风能力强。由于头部可调角度的矢量姿态控制螺旋桨160提供的拉力形成的“悬吊”作用和所具有方向调整功能,使得整机具有在运动的舰艇、汽车上起落的能力。因此,这样能够可靠地实现无人机的垂直起降。
57.在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。
58.以上所述仅为本技术的实施例而已,并不用于限制本技术的保护范围,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。