技术特征:
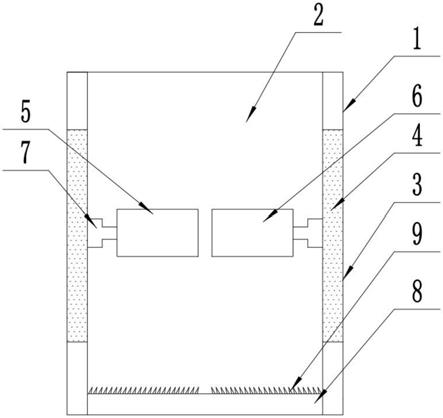
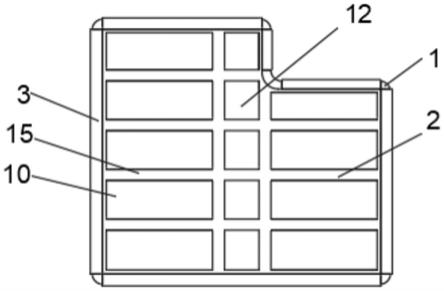
1.一种具有深潜功能的探测装置,其特征在于:包括主旋翼机构、四组辅旋翼机构、辅旋翼收放机构、四个水下推进器(16)、承压舱(20)、旋翼机构固定架(12)以及外壳(6);在外壳(6)内设置有安装空腔;承压舱(20)以及旋翼机构固定架(12)均安装在安装空腔内;主旋翼机构的下端安装在旋翼机构固定架(12)上,且主旋翼机构的上端伸出外壳(6)外;四组辅旋翼机构同步上下摆动式铰接在旋翼机构固定架(12)上;在外壳(6)上设置有四个容置槽(8),四组辅旋翼机构下摆后分别位于四个容置槽(8)内;辅旋翼收放机构安装在旋翼机构固定架(12)上,用于驱动四组辅旋翼机构同步上下摆动;四个水下推进器(16)均安装在外壳(6)外;在承压舱(20)内设置有控制器、无线通信模块、存储器以及推进器驱动电路;在外壳(6)上安装有与控制器电连接的水深传感器、温度传感器以及盐度传感器;在外壳(6)的下端安装有与控制器电连接的高度计(17);推进器驱动电路与四个水下推进器(16)电连接,控制器通过推进器驱动电路协调控制四个水下推进器(16)正反转;主旋翼机构、四组辅旋翼机构、辅旋翼收放机构均由控制器驱动控制。2.根据权利要求1所述的具有深潜功能的探测装置,其特征在于:主旋翼机构包括主旋翼臂(4)、主旋翼电机(2)以及主旋翼(1);主旋翼臂(4)的下端固定在旋翼机构固定架(12)上,上端伸出外壳(6)外;主旋翼电机(2)安装在主旋翼臂(4)的伸出端上;主旋翼(1)安装在主旋翼电机(2)的输出轴上;在承压舱(20)内设置有与控制器电连接的主旋翼驱动电路;主旋翼驱动电路与主旋翼电机(2)电连接,控制器通过主旋翼驱动电路驱动主旋翼电机(2)旋转。3.根据权利要求2所述的具有深潜功能的探测装置,其特征在于:在主旋翼臂(4)上安装有主旋翼固定装置;主旋翼固定装置包括滑动套管(3)以及两根推杆(5);滑动套管(3)滑动式安装在主旋翼臂(4)的上端上;在滑动套管(3)上设置有四个用于阻挡主旋翼(1)旋转的阻挡槽口(26);两根推杆(5)的上端均固定在滑动套管(3)上,下端固定在辅旋翼收放机构上,由辅旋翼收放机构在驱动四组辅旋翼机构上摆时带动滑动套管(3)下滑,在驱动四组辅旋翼机构下摆时带动滑动套管(3)上滑。4.根据权利要求1所述的具有深潜功能的探测装置,其特征在于:辅旋翼收放机构包括辅旋翼收放电机(28)、驱动丝杠(27)以及升降盘(25);辅旋翼收放电机(28)安装在旋翼机构固定架(12)上;驱动丝杠(27)对接在辅旋翼收放电机(28)的输出轴上,且驱动丝杠(27)旋合在升降盘(25)上;四组辅旋翼机构的上端铰接在升降盘(25)上;在承压舱(20)内设置有与控制器电连接的收放驱动电路;收放驱动电路与辅旋翼收放电机(28)电连接,控制器通过收放驱动电路驱动辅旋翼收放电机(28)旋转。5.根据权利要求4所述的具有深潜功能的探测装置,其特征在于:辅旋翼机构包括辅旋翼臂(9)以及辅旋翼电机(18);辅旋翼臂(9)的上部通过铰接座(11)铰接在旋翼机构固定架(12)上;辅旋翼臂(9)的上端通过连杆(10)铰接在升降盘(25)上;辅旋翼电机(18)安装在辅旋翼臂(9)的下端上;在辅旋翼电机(18)的输出轴上安装有辅旋翼(15);在承压舱(20)内设置有与控制器电连接的辅旋翼驱动电路;辅旋翼驱动电路与四个辅旋翼电机(18)电连接,控制器通过辅旋翼驱动电路协调控制四个辅旋翼电机(18)。6.根据权利要求5所述的具有深潜功能的探测装置,其特征在于:在每个辅旋翼机构上均安装有旋翼阻挡机构;旋翼阻挡机构包括旋转方管(21)、伸缩方管(22)以及拉绳(13);旋
转方管(21)的一端旋转式安装在辅旋翼臂(9)上,伸缩方管(22)的一端弹性伸缩式安装在旋转方管(21)的另一端上;在旋转方管(21)与辅旋翼臂(9)之间安装有扭簧,扭簧在辅旋翼臂(9)下摆时驱动旋转方管(21)旋转至与辅旋翼臂(9)相垂直,伸缩方管(22)阻挡辅旋翼(15);拉绳(13)的一端固定在旋翼机构固定架(12)上,另一端固定在旋转方管(21)上,拉绳(13)在辅旋翼臂(9)上摆时拉动旋转方管(21),使旋转方管(21)旋转直至与辅旋翼臂(9)相平行。7.根据权利要求6所述的具有深潜功能的探测装置,其特征在于:在伸缩方管(22)的另一端上安装有滚轮(23)。8.根据权利要求1所述的具有深潜功能的探测装置,其特征在于:在外壳(6)上设置有四个分别横向环绕四个水下推进器(16)的保护围挡(14)。9.根据权利要求1所述的具有深潜功能的探测装置,其特征在于:在外壳(6)上部安装有四个浮力舱(7),用于提供浮力使探测装置姿态平稳的漂浮在水面上。10.根据权利要求1所述的具有深潜功能的探测装置的探测方法,其特征在于:包括如下步骤:参数设定步骤:预先设定需要测量的各个深度,并储存在存储器中;水面降落步骤:主旋翼机构以及四组辅旋翼机构在控制器的协调控制下,带动探测装置飞行至待检测位置并下降,高度计(17)实时向控制器反馈距离水面的高度数据,由控制器判断是否接近水面,当控制器判断探测装置接近水面时,控制器控制辅旋翼收放机构驱动四组辅旋翼机构上摆升高,使探测装置保持姿态平稳下落,直至四个水下推进器(16)浸入水中,控制器控制四个水下推进器(16)工作,保持探测装置姿态平稳的浮于水面;控制器控制辅旋翼收放机构驱动四组辅旋翼机构下摆收回,主旋翼机构停止工作;下潜步骤:控制器协调控制四个水下推进器(16)产生大于浮力的推力,从而下潜;水深传感器实时检测水深数据并向控制器反馈,由控制器判断是否到达预设的最深深度,高度计(17)向控制器实时反馈检测数据,由控制器判断是否到达水底,当控制器判断探测装置到达预设的最深深度或即将到达水底时,控制器控制四个水下推进器(16)使探测装置悬浮于水中;上浮探测步骤:控制器控制四个水下推进器(16)停止工作,探测装置在浮力作用下开始上浮;在探测装置上浮的过程中,每到达一个指定深度时,控制器控制温度传感器、盐度传感器以及水深传感器采集数据,并储存在存储器中,直至探测装置平稳浮出水面,控制器控制无线通信模块将存储器中的数据上传至远程控制中心,完成探测;水面起飞步骤:控制器控制四个水下推进器(16)保持探测装置姿态平稳,控制器控制旋翼收放机构驱动四组辅旋翼机构上摆升高,使四组辅旋翼机构脱离水面,之后主旋翼机构以及四组辅旋翼机构在控制器的控制下,带动探测装置脱离水面,高度计(17)实时向控制器反馈数据,由控制器判断是否脱离水面,当控制器判断探测装置脱离水面后,控制器控制旋翼收放机构驱动四组辅旋翼机构摆平,并控制四个水下推进器(16)停止工作,完成起飞。
技术总结
本发明公开了一种具有深潜功能的探测装置及其探测方法,其中具有深潜功能的探测装置包括主旋翼机构、四组辅旋翼机构、辅旋翼收放机构、四个水下推进器、承压舱、旋翼机构固定架以及外壳。该具有深潜功能的探测装置利用四个水下推进器在水下推进,探测装置可以克服浮力作用实现下潜和水下机动运动,实现了较深海域环境的探测;利用四组辅旋翼机构可下摆收回,减少了下潜和上浮过程中的阻力,同时使探测装置重心下移,有利于探测装置在水中的稳定性;利用辅旋翼收放机构控制四组辅旋翼机构摆动至水平位置,提高了探测装置的飞行升力和空中飞行巡航能力;利用高度计实现探测装置防触底。底。底。
技术研发人员:刘强 陈希 刘科峰 毛科峰 王晓 王在福 陈丽 李妍 吴海龙 卢辰
受保护的技术使用者:江苏海洋大学
技术研发日:2021.08.10
技术公布日:2021/10/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。