1.本发明涉及一种探测装置,尤其是一种具有深潜功能的探测装置及其探测方法。
背景技术:
2.跨介质海洋探测设备最早可追溯到1934年提出的潜空两栖跨介质飞机概念。然而,由于水环境和空气环境之间的显著差异,航行器要同时满足两种介质的要求并不是一件容易的事。尽管美国等一些国家提出了许多载人两栖飞机设计方案,但最终都没有真正地实现海空两栖航行。近几十年,随着无人系统技术的发展,跨介质探测装备的研究取得较大进展,产生了很多的概念和变体,与有人航行器相比,这种系统的复杂度和技术难度有所降低。但是,总体来看这些跨介质探测设备仅能进行浅海航行,难以满足深海探测需求。
3.具有深潜功能的跨介质海洋环境探测装置还存在许多技术难题需要克服。如,探测装置空中飞行和深潜对重量需求的矛盾、介质之间模态过渡的实现、满足要求的多种介质推进系统设计、姿态稳定性等。为了解决这些问题,本发明提出了一种具有深潜功能的探测装置及其探测方法。
技术实现要素:
4.发明目的:提供一种具有深潜功能的探测装置及其探测方法,能够实现探测较深海域环境的需要。
5.技术方案:本发明所述的具有深潜功能的探测装置,包括主旋翼机构、四组辅旋翼机构、辅旋翼收放机构、四个水下推进器、承压舱、旋翼机构固定架以及外壳;
6.在外壳内设置有安装空腔;承压舱以及旋翼机构固定架均安装在安装空腔内;主旋翼机构的下端安装在旋翼机构固定架上,且主旋翼机构的上端伸出外壳外;四组辅旋翼机构同步上下摆动式铰接在旋翼机构固定架上;在外壳上设置有四个容置槽,四组辅旋翼机构下摆后分别位于四个容置槽内;辅旋翼收放机构安装在旋翼机构固定架上,用于驱动四组辅旋翼机构同步上下摆动;四个水下推进器均安装在外壳外;
7.在承压舱内设置有控制器、无线通信模块、存储器以及推进器驱动电路;在外壳上安装有与控制器电连接的水深传感器、温度传感器以及盐度传感器;在外壳的下端安装有与控制器电连接的高度计;推进器驱动电路与四个水下推进器电连接,控制器通过推进器驱动电路协调控制四个水下推进器正反转;主旋翼机构、四组辅旋翼机构、辅旋翼收放机构均由控制器驱动控制。
8.进一步的,主旋翼机构包括主旋翼臂、主旋翼电机以及主旋翼;主旋翼臂的下端固定在旋翼机构固定架上,上端伸出外壳外;主旋翼电机安装在主旋翼臂的伸出端上;主旋翼安装在主旋翼电机的输出轴上;
9.在承压舱内设置有与控制器电连接的主旋翼驱动电路;主旋翼驱动电路与主旋翼电机电连接,控制器通过主旋翼驱动电路驱动主旋翼电机旋转。
10.进一步的,在主旋翼臂上安装有主旋翼固定装置;主旋翼固定装置包括滑动套管
以及两根推杆;滑动套管滑动式安装在主旋翼臂的上端上;在滑动套管上设置有四个用于阻挡主旋翼旋转的阻挡槽口;两根推杆的上端均固定在滑动套管上,下端固定在辅旋翼收放机构上,由辅旋翼收放机构在驱动四组辅旋翼机构上摆时带动滑动套管下滑,在驱动四组辅旋翼机构下摆时带动滑动套管上滑。
11.进一步的,辅旋翼收放机构包括辅旋翼收放电机、驱动丝杠以及升降盘;辅旋翼收放电机安装在上侧圆盘上;驱动丝杠对接在辅旋翼收放电机的输出轴上;在升降盘的中心设置有螺纹孔,驱动丝杠旋合在螺纹孔上;两根推杆的下端均固定在升降盘上;四组辅旋翼机构的上端铰接在升降盘上;
12.在承压舱内设置有与控制器电连接的收放驱动电路;收放驱动电路与辅旋翼收放电机电连接,控制器通过收放驱动电路驱动辅旋翼收放电机旋转。
13.进一步的,辅旋翼机构包括辅旋翼臂以及辅旋翼电机;辅旋翼臂的上部通过铰接座铰接在旋翼机构固定架上;辅旋翼臂的上端通过连杆铰接在升降盘上;辅旋翼电机安装在辅旋翼臂的下端上;在辅旋翼电机的输出轴上安装有辅旋翼;
14.在承压舱内设置有与控制器电连接的辅旋翼驱动电路;辅旋翼驱动电路与四个辅旋翼电机电连接,控制器通过辅旋翼驱动电路协调控制四个辅旋翼电机。
15.进一步的,在每个辅旋翼机构上均安装有旋翼阻挡机构;旋翼阻挡机构包括旋转方管、伸缩方管以及拉绳;旋转方管的一端旋转式安装在辅旋翼臂上,伸缩方管的一端弹性伸缩式安装在旋转方管的另一端上;在旋转方管与辅旋翼臂之间安装有扭簧,扭簧在辅旋翼臂下摆时驱动旋转方管旋转至与辅旋翼臂相垂直,伸缩方管阻挡辅旋翼;拉绳的一端固定在旋翼机构固定架上,另一端固定在旋转方管上,拉绳在辅旋翼臂上摆时拉动旋转方管,使旋转方管旋转直至与辅旋翼臂相平行。
16.进一步的,在伸缩方管的另一端上安装有滚轮。
17.进一步的,在外壳上设置有四个分别横向环绕四个水下推进器的保护围挡。
18.进一步的,在在外壳上部安装有四个浮力舱,用于提供浮力使探测装置姿态平稳的漂浮在水面上。
19.本发明还提供了一种具有深潜功能的探测装置的探测方法,包括如下步骤:
20.参数设定步骤:预先设定需要测量的各个深度,并储存在存储器中;
21.水面降落步骤:主旋翼机构以及四组辅旋翼机构在控制器的协调控制下,带动探测装置飞行至待检测位置并下降,高度计实时向控制器反馈距离水面的高度数据,由控制器判断是否接近水面,当控制器判断探测装置接近水面时,控制器控制辅旋翼收放机构驱动四组辅旋翼机构上摆升高,使探测装置保持姿态平稳下落,直至四个水下推进器浸入水中,控制器控制四个水下推进器工作,保持探测装置姿态平稳的浮于水面;控制器控制辅旋翼收放机构驱动四组辅旋翼机构下摆收回,主旋翼机构停止工作;
22.下潜步骤:控制器协调控制四个水下推进器产生大于浮力的推力,从而下潜;水深传感器实时检测水深数据并向控制器反馈,由控制器判断是否到达预设的最深深度,高度计向控制器实时反馈检测数据,由控制器判断是否到达水底,当控制器判断探测装置到达预设的最深深度或即将到达水底时,控制器控制四个水下推进器使探测装置悬浮于水中;
23.上浮探测步骤:控制器控制四个水下推进器停止工作,探测装置在浮力作用下开始上浮;在探测装置上浮的过程中,每到达一个指定深度时,控制器控制温度传感器、盐度
传感器以及水深传感器采集数据,并储存在存储器中,直至探测装置平稳浮出水面,控制器控制无线通信模块将存储器中的数据上传至远程控制中心,完成探测;
24.水面起飞步骤:控制器控制四个水下推进器保持探测装置姿态平稳,控制器控制旋翼收放机构驱动四组辅旋翼机构上摆升高,使四组辅旋翼机构脱离水面,之后主旋翼机构以及四组辅旋翼机构在控制器的控制下,带动探测装置脱离水面,高度计实时向控制器反馈数据,由控制器判断是否脱离水面,当控制器判断探测装置脱离水面后,控制器控制旋翼收放机构驱动四组辅旋翼机构摆平,并控制四个水下推进器停止工作,完成起飞。本发明与现有技术相比,其有益效果是:利用四个水下推进器在水下推进,探测装置可以克服浮力作用实现下潜和水下机动运动,实现了较深海域环境的探测;利用四组辅旋翼机构可下摆收回,减少了下潜和上浮过程中的阻力,同时使探测装置重心下移,有利于探测装置在水中的稳定性;利用辅旋翼收放机构控制四组辅旋翼机构摆动至水平位置,提高了探测装置的飞行升力和空中飞行巡航能力;利用高度计实现探测装置防触底;利用水深传感器、温度传感器以及盐度传感器实现数据采集;利用存储器储存各个传感器采集的信号数据;利用无线通信模块将存储器内的数据上传至远程控制中心。
附图说明
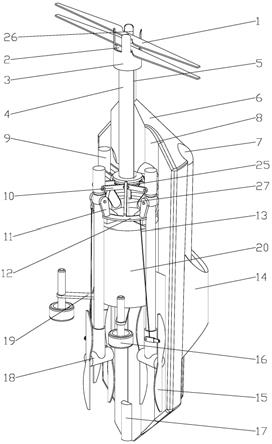
25.图1为本发明的内部结构立体图;
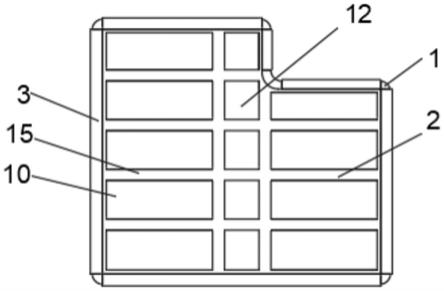
26.图2为本发明下潜时的状态图;
27.图3为本发明的仰视图;
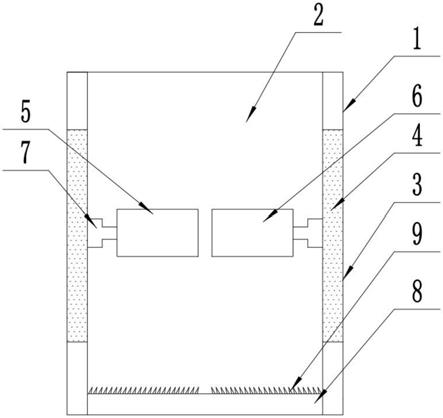
28.图4为本发明的局部剖视图;
29.图5为本发明旋翼阻挡机构的局部放大图;
30.图6为本发明飞行时的状态图;
31.图7为本发明的辅旋翼机构升高时的状态图;
32.图8为本发明的电路结构示意图;
33.图9为本发明的水面降落步骤流程图;
34.图10为本发明的下潜步骤流程图;
35.图11为本发明的上浮探测步骤流程图;
36.图12为本发明的水面起飞步骤流程图。
具体实施方式
37.下面结合附图对本发明技术方案进行详细说明,但是本发明的保护范围不局限于所述实施例。
38.实施例1:
39.如图1
‑
8所示,本发明公开的具有深潜功能的探测装置包括:主旋翼机构、四组辅旋翼机构、辅旋翼收放机构、四个水下推进器16、承压舱20、旋翼机构固定架12以及外壳6;
40.在外壳6内设置有安装空腔;承压舱20以及旋翼机构固定架12均安装在安装空腔内,且旋翼机构固定架12位于承压舱20上方;主旋翼机构的下端安装在旋翼机构固定架12上,且主旋翼机构的上端伸出外壳6外;四组辅旋翼机构同步上下摆动式铰接在旋翼机构固定架12上,四组辅旋翼机构上摆后呈十字形分布,且四组辅旋翼机构均伸出安装空腔外;在
外壳6上竖向设置有四个与安装空腔相连通的容置槽8,四组辅旋翼机构下摆后分别位于四个容置槽8内;辅旋翼收放机构安装在旋翼机构固定架12上,用于驱动四组辅旋翼机构上下摆动;四个水下推进器16均通过十字形支架19安装在承压舱20上,且四个水下推进器16均位于外壳6外;
41.在承压舱20内设置有控制器、无线通信模块、存储器以及推进器驱动电路;在外壳6上安装有与控制器电连接的水深传感器、温度传感器以及盐度传感器;在外壳6的下端安装有与控制器电连接的高度计17;推进器驱动电路与四个水下推进器16电连接,控制器通过推进器驱动电路协调控制四个水下推进器16正反转;主旋翼机构、四组辅旋翼机构、辅旋翼收放机构均由控制器驱动控制。
42.利用四个水下推进器16在水下推进,探测装置可以克服浮力作用实现下潜和水下机动运动,实现了较深海域环境的探测;利用四组辅旋翼机构可下摆收回,减少了下潜和上浮过程中的阻力,同时使探测装置重心下移,有利于探测装置在水中的稳定性;利用辅旋翼收放机构控制四组辅旋翼机构摆动至水平位置,提高了探测装置的飞行升力和空中飞行巡航能力;利用高度计17实现探测装置防触底;利用水深传感器、温度传感器以及盐度传感器实现数据采集;利用存储器储存各个传感器采集的信号数据;利用无线通信模块将存储器内的数据上传至远程控制中心。
43.进一步的,主旋翼机构包括主旋翼臂4、主旋翼电机2以及主旋翼1;主旋翼臂4的下端固定在旋翼机构固定架12上,上端伸出外壳6外;主旋翼电机2安装在主旋翼臂4的伸出端上,且主旋翼电机2的输出轴竖直向上;
44.在承压舱20内设置有与控制器电连接的主旋翼驱动电路;主旋翼驱动电路与主旋翼电机2电连接,控制器通过主旋翼驱动电路驱动主旋翼电机2旋转。
45.利用主旋翼臂4将主旋翼电机2以及主旋翼1高举远离水面,提高了探测装置的水面起飞能力。
46.进一步的,在主旋翼臂4上安装有主旋翼固定装置;主旋翼固定装置包括滑动套管3以及两根推杆5;滑动套管3滑动式安装在主旋翼臂4的上端上;在滑动套管3的上边缘上设置有四个用于阻挡主旋翼1旋转的阻挡槽口26;两根推杆5的上端均固定在滑动套管3的下边缘上,两根推杆5的下端均穿过旋翼机构固定架12后固定在辅旋翼收放机构上,由辅旋翼收放机构在驱动四组辅旋翼机构上摆时带动滑动套管3下滑,在驱动四组辅旋翼机构下摆时带动滑动套管3上滑。
47.利用滑动套管3、两根推杆5以及四个阻挡槽口26之间的配合,保证了下落过程中辅旋翼收放机构在带动四个辅旋翼机构下摆的同时,驱动两根推杆5向上推动滑动套管3,使主旋翼1卡在阻挡槽口26内,保证探测装置入水后主旋翼机构以及辅旋翼机构均被固定,防止影响探测装置的下潜。
48.进一步的,辅旋翼收放机构包括辅旋翼收放电机28、驱动丝杠27以及升降盘25;辅旋翼收放电机28安装在旋翼机构固定架12的上侧面上,且旋翼收放电机的输出轴贯穿旋翼机构固定架12的上侧板,驱动丝杠27对接在辅旋翼收放电机28的输出轴上;在升降盘25的中心设置有螺纹孔,驱动丝杠27旋合在螺纹孔上,且驱动丝杠27的下端旋转式安装在承压舱20的上侧面上;两根推杆5的下端均固定在升降盘25上;四组辅旋翼机构的上端铰接在升降盘25上;
49.在承压舱20内设置有与控制器电连接的收放驱动电路;收放驱动电路与辅旋翼收放电机28电连接,控制器通过收放驱动电路驱动辅旋翼收放电机28旋转。
50.利用驱动丝杠27驱动升降盘25上下移动,带动四组辅旋翼机构上下摆动,实现了对四组辅旋翼机构展开或收起的控制,同时升降盘25驱动四组辅旋翼机构上摆离开水面,提高探测装置的水面起飞能力。
51.进一步的,辅旋翼机构包括辅旋翼臂9以及辅旋翼电机18;辅旋翼臂9的上部通过铰接座11铰接在旋翼机构固定架12上;辅旋翼臂9的上端通过连杆10铰接在升降盘25上;辅旋翼电机18安装在辅旋翼臂9的下端上;在辅旋翼电机18的输出轴上安装有辅旋翼15;
52.在承压舱20内设置有与控制器电连接的辅旋翼驱动电路;辅旋翼驱动电路与四个辅旋翼电机18电连接,控制器通过辅旋翼驱动电路协调控制四个辅旋翼电机18。
53.利用辅旋翼电机18驱动两个辅旋翼15旋转,在飞行时辅助主旋翼机构调整方向,保证探测装置顺利到达待测点。
54.进一步的,在每个辅旋翼机构上均安装有旋翼阻挡机构;旋翼阻挡机构包括旋转方管21、伸缩方管22以及拉绳13;旋转方管21的一端旋转式安装在辅旋翼臂9的下端圆周面上,伸缩方管22的一端弹性伸缩式安装在旋转方管21的另一端上;在旋转方管21与辅旋翼臂9之间安装有扭簧,扭簧在辅旋翼臂9下摆时驱动旋转方管21旋转至与辅旋翼臂9相垂直,伸缩方管22阻挡辅旋翼15;拉绳13的一端固定在旋翼机构固定架12上,另一端固定在旋转方管21上,拉绳13在辅旋翼臂9上摆时拉动旋转方管21,使旋转方管21旋转直至与辅旋翼臂9相平行;当辅旋翼电机18为两个单输出轴电机时,辅旋翼机构包含两个伸缩方管22,且两个伸缩方管22分别弹性伸缩式安装在旋转方管21的两端上。
55.利用拉绳13在辅旋翼机构上摆时拉动旋转方管21,使旋转方管21与辅旋翼臂9相平行,保证伸缩方管22不阻碍辅旋翼15旋转;利用扭簧在辅旋翼臂9下摆时驱动旋转方管21旋转至与辅旋翼臂9相垂直,从而使伸缩方管22阻挡辅旋翼15,保证辅旋翼机构能顺利收回容置槽8内;利用伸缩方管22弹性伸缩式安装在旋转方管21上,在辅旋翼15阻挡旋转方管21时伸缩方管22回缩,防止辅旋翼15受损。
56.进一步的,在伸缩方管22的另一端上安装有滚轮23。利用滚轮23将伸缩方管22与辅旋翼15之间的滑动摩擦变为滚动摩擦,减小辅旋翼15的损伤。
57.进一步的,十字形支架19的四个分支端部均贯穿外壳6伸出;四个水下推进器16的桨轴分别竖向固定在十字形支架19四个分支的伸出端上;在外壳6上设置有四个分别横向环绕四个水下推进器16的保护围挡14。
58.利用十字形支架19保证了四个水下推进器16能均匀推进,使探测装置保持平衡,同时便于调整方向;利用保护围挡14保护水下推进器16,防止探测装置受到磕碰时水下推进器16损坏。
59.进一步的,在外壳6上部安装有四个浮力舱7,用于提供浮力使探测装置姿态平稳的漂浮在水面上。
60.利用四个浮力舱7为探测装置提供浮力,且浮力舱7处于探测装置上部能够更好的保证探测装置的浮心高于重心,既可以保证探测装置上浮和下潜过程中的姿态稳定性,又可以保证探测装置水面漂浮时的稳定性。
61.如图8
‑
12所示,本发明还提供了一种具有深潜功能的探测装置的探测方法,包括
如下步骤:
62.参数设定步骤:预先设定需要测量的各个深度,并储存在存储器中;
63.水面降落步骤:控制器通过主旋翼驱动电路以及辅旋翼驱动电路协调控制主旋翼电机2以及四个辅旋翼电机18,带动探测装置飞行并下降,高度计17实时向控制器反馈距离水面的高度数据,由控制器判断是否接近水面,当控制器判断探测装置距离水面5米时,控制器通过控制收放驱动电路驱动辅旋翼收放电机28旋转,升降盘25在驱动丝杠27的驱动下向下运动,四个辅旋翼臂9向上摆升高,使探测装置保持姿态平稳下落,直至四个水下推进器16浸入水中,控制器通过推进器驱动电路协调控制四个水下推进器16工作,保持探测装置姿态平稳的浮于水面;之后控制器控制主旋翼电机2以及四个辅旋翼电机18停止工作,控制器通过控制收放驱动电路驱动辅旋翼收放电机28旋转,升降盘25在驱动丝杠27的驱动下向上运动,带动两根推杆5推动滑动套管3上移,阻挡槽口26卡扣主旋翼1,同时四个辅旋翼臂9向下摆,各个扭簧驱动各个旋转方管21旋转至与辅旋翼臂9相垂直,控制器给四个辅旋翼电机18小占空比输入信号,使各个辅旋翼15缓慢旋转,辅旋翼15受到伸缩方管22阻挡后停止旋转,四个辅旋翼臂9的下端收回四个容置槽8内;
64.下潜步骤:控制器通过推进器驱动电路协调控制四个水下推进器16产生大于浮力的推力,从而下潜;水深传感器实时检测水深数据并向控制器反馈,由控制器判断是否到达预设的最深深度,高度计17实时向控制器实时反馈检测数据,由控制器判断是否到达水底,当控制器判断探测装置到达预设的最深深度或即将到达水底时,控制器控制四个水下推进器16使探测装置悬浮于水中;
65.上浮探测步骤:控制器控制四个水下推进器16停止工作,探测装置在四个浮力舱7的浮力作用下开始上浮;在探测装置上浮的过程中,每到达一个指定深度时,控制器控制温度传感器、盐度传感器以及水深传感器采集数据,并储存在存储器中,直至探测装置平稳浮出水面,控制器控制无线通信模块将存储器中的数据上传至远程控制中心,完成探测;
66.水面起飞步骤:控制器通过推进器驱动电路协调控制四个水下推进器16保持探测装置姿态平稳,控制器通过控制收放驱动电路驱动辅旋翼收放电机28旋转,升降盘25在驱动丝杠27的驱动下向下运动,带动两根推杆5推动滑动套管3下移,主旋翼1脱离阻挡槽口26,同时四个辅旋翼臂9上摆升高脱离水面,各个拉绳13拉动各个旋转方管21旋转直至与辅旋翼臂9相平行,各个辅旋翼15无遮挡;控制器通过主旋翼驱动电路以及辅旋翼驱动电路协调控制主旋翼电机2以及四个辅旋翼电机18旋转,带动探测装置脱离水面,高度计17实时向控制器反馈数据,由控制器判断是否脱离水面,当控制器判断探测装置脱离水面五米后,控制器控制辅旋翼收放电机28旋转,升降盘25向上运动,四个辅旋翼臂9向下摆平呈水平状态,同时控制器控制四个水下推进器16停止工作,完成起飞。
67.本发明提供的具有深潜功能的探测装置中,高度计17、深传感器、温度传感器以及盐度传感器均采用现有的数字式传感器,用于采集数据;控制器采用现有的arm处理器模块,用于实现协调控制;存储器采用现有的存储器;无线通信模块采用现有的无线通信模块用于将存储器内的数据上传至远程控制中心;水下推进器16采用现有的水下推进器,用于控制探测装置在水下的下潜深度以及下潜方向;主旋翼电机2、辅旋翼收放电机28以及辅旋翼电机18均采用现有的步进电机;主旋翼驱动电路、收放驱动电路以及辅旋翼驱动电路均采用对应的步进电机驱动电路。
68.如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上做出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。