1.本发明涉及一种云台,具体涉及一种三轴自稳云台。
背景技术:
2.云台是一种为实现目标物体姿态稳定控制的装置,通常作为设备摄像用。在商业航拍、空中摄影、空中巡航监视及滞空平台的实际工作中,大多使用自稳云台来稳定摄像机的方向,以保持拍摄画面的清晰与稳定。但现有自稳云台仅满足航向、俯仰两个方向的轴向旋转,在运动过程中,拍摄的画面清晰度和稳定性较差。
技术实现要素:
3.为了解决现有自稳云台仅满足航向、俯仰两个方向的轴向旋转,在运动过程中,存在拍摄画面清晰度和稳定性较差的技术问题,本发明提供了一种三轴自稳云台。
4.为实现上述目的,本发明提供的技术方案是:
5.一种三轴自稳云台,其特殊之处在于:
6.包括控制单元、固定顶架、陀螺仪组件、转腔组件、中仓组件、航向电机、横滚电机、俯仰电机以及摄像功能组件;转腔组件位于固定顶架和中仓组件之间;
7.所述航向电机的定子与固定顶架连接;
8.所述航向电机的转子与转腔组件连接;
9.所述横滚电机的定子与转腔组件连接,且横滚电机定子的轴线与航向电机转子的轴线垂直;
10.所述横滚电机的转子与中仓组件连接;
11.所述俯仰电机的定子固定在中仓组件内,俯仰电机定子的轴线与横滚电机定子的轴线以及航向电机转子的轴线均垂直,其转子与位于中仓组件外侧的所述摄像功能组件连接;
12.所述陀螺仪组件设置在摄像功能组件内,包括三轴陀螺仪和三轴加速度传感器;
13.所述控制单元与陀螺仪组件连接;
14.所述控制单元包括航向电机驱动板、横滚电机驱动板和俯仰电机驱动板,分别控制航向电机、横滚电机和俯仰电机的动作。
15.进一步地,还包括分别设置在航向电机、横滚电机和俯仰电机输出轴上的航向电机编码器、横滚电机编码器和俯仰电机编码器;所述航向电机编码器、横滚电机编码器和俯仰电机编码器的输出分别接航向电机驱动板、横滚电机驱动板和俯仰电机驱动板。
16.进一步地,所述摄像功能组件为2个,分别位于中仓组件的两侧;
17.2个摄像功能组件分别为短焦成像镜头和长焦成像镜头;或者,2个摄像功能组件分别为摄像组件和热红外组件;或者,2个摄像功能组件均为多光谱相机;或者,2个摄像功能组件规格相同,均为成像组件,构成双目成像系统。
18.进一步地,所述航向电机、横滚电机和俯仰电机的输出轴上均设有导电滑环;
19.所述固定顶架内还设有陀螺仪。
20.进一步地,所述固定顶架、转腔组件、中仓组件从上至下依次设置,或者从下至上依次设置。
21.进一步地,所述固定顶架上设置有至少一个减震器。
22.进一步地,2个摄像功能组件分别通过动环安装组件连接在俯仰电机转子的两端;
23.所述动环安装组件包括轴承、轴承安装件、轴承盖板、挡块、限位挡块和转接架,转接架穿设在中仓组件上,转接架的一端与俯仰电机转子同轴相连,另一端与摄像功能组件相连;
24.所述中仓组件上设有用于安装轴承安装件的安装孔;
25.所述轴承安装件穿设在安装孔内,轴承设置在轴承安装件和转接架之间;
26.所述限位挡块的一端与转接架相连,
27.所述挡块设置在中仓组件内侧壁上,用于对限位挡块另一端的限位,实现云台俯仰角限位。
28.进一步地,其中一个动环安装组件的转接架与俯仰电机转子之间设有磁环组件;
29.所述磁环组件包括磁环转接件、磁铁和俯仰电机编码器安装片,磁环转接件为空心结构,两端分别与俯仰电机、转接架固连,且磁环转接件与转接架相连的一端沿周向设有缺口,磁铁安装在俯仰电机转轴端部的磁铁安装孔内,俯仰电机编码器安装片的一端设置在中仓组件内壁上,另一端伸向磁环转接件的缺口,且与磁铁相对,俯仰电机编码器安装在俯仰电机编码器安装片与磁铁相对的位置,在俯仰电机带动磁环转接件转动过程中,俯仰电机编码器安装片对磁环转接件的转动进行限位,实现云台俯仰角的限位。
30.进一步地,还包括设置在中仓组件内的交换机。
31.进一步地,所述转腔组件包括腔体转座、设置在腔体转座上的转腔连接板以及设置在腔体转座一端下侧的转座端盖,转腔连接板中部向下凹,形成用于安装航向电机的航向电机安装槽。
32.与现有技术相比,本发明的优点是:
33.1、本发明三轴自稳云台设有三个伺服电机(航向电机、横滚电机、俯仰电机),分别负责航向(方位)、横滚、俯仰、三个方向轴向的旋转,在摄像功能组件内设有陀螺仪组件,用于获取云台的姿态数据,航向电机驱动板、横滚电机驱动板、俯仰电机驱动板根据云台的姿态数据,调整航向电机、横滚电机、俯仰电机三个方向轴向的旋转,来稳定摄像功能组件的方向和姿态,以保持拍摄画面的清晰与稳定。
34.2、由于云台在实际工作中,三轴陀螺仪会受到干扰,导致三轴陀螺仪反馈的姿态失真,从而使云台出现抖动和不稳定的现象,因此,本发明在航向电机、横滚电机和俯仰电机输出轴上安装编码器,三轴陀螺仪、三轴加速度传感器、编码器构成反馈系统,通过编码器的反馈来抵消陀螺仪的干扰和改善转动角度过大问题,有效提升云台稳定精度,以获得高的图像质量,具有重要的工业应用价值;同时也使得各轴向的转动角度增大且稳定。
35.3、本发明2个摄像功能组件为摄像组件和热红外组件,可实现稳定摄像头和热红外镜头的方向,以保持拍摄画面的清晰与稳定。
36.4、为了便于俯仰电机编码器的安装,本发明在动环安装组件与俯仰电机转子之间的磁环组件设有俯仰电机编码器安装片。
37.5、本发明在航向电机和横滚电机上安装导电滑环,用于对电机线、传感器线、编码器线的保护。
附图说明
38.图1是本发明三轴自稳云台的立体结构示意图;
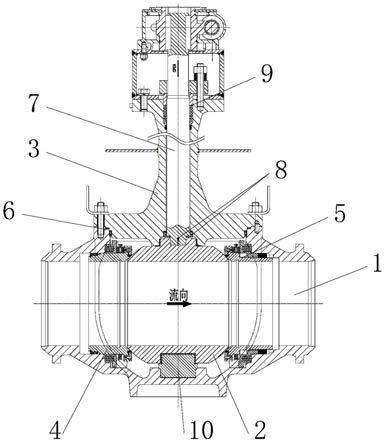
39.图2是本发明三轴自稳云台的纵向剖视图一(经航向电机轴线,且与俯仰电机轴线平行的面为剖面);
40.图3是本发明三轴自稳云台的横向剖视图(经俯仰电机轴线,且与横滚电机轴线垂直的面为剖面);
41.图4是本发明三轴自稳云台的纵向剖视图二(经航向电机轴线,且与横滚电机轴线平行的面为剖面);
42.图5是本发明三轴自稳云台中固定顶架和转腔组件处的结构示意图;
43.图6是图5的剖视图;
44.图7是本发明三轴自稳云台的中仓组件处的结构示意图一;
45.图8是本发明三轴自稳云台的中仓组件处的结构示意图二(示意出机仓中腔体内部结构);
46.图9是本发明三轴自稳云台中摄像组件的结构示意图;
47.图10是本发明三轴自稳云台中热红外组件的结构示意图;
48.图11是本发明三轴自稳云台的工作流程图;
49.其中,附图标记如下:
[0050]1‑
固定顶架,11
‑
顶部腔体,12
‑
顶端安装板;
[0051]2‑
转腔组件,21
‑
腔体转座,22
‑
转腔连接板,221
‑
航向电机安装槽,23
‑
转座端盖;
[0052]3‑
中仓组件,31
‑
机仓中腔体,32
‑
中仓后盖,33
‑
中仓上盖,34
‑
安装孔;
[0053]4‑
航向电机,5
‑
横滚电机,6
‑
俯仰电机,61
‑
俯仰电机转轴,62
‑
电机转接板;
[0054]
71
‑
航向电机驱动板,72
‑
横滚电机驱动板,73
‑
俯仰电机驱动板;
[0055]8‑
摄像组件,81
‑
摄像腔体,82
‑
摄像头前盖,83
‑
摄像头后盖,84
‑
摄像前塑盖,85
‑
摄像头镜片,86
‑
灯光镜片,87
‑
摄像机芯,88
‑
白光灯板,89
‑
橡胶密封垫;
[0056]9‑
热红外组件,91
‑
热红外腔体,92
‑
腔后盖,93
‑
热红外镜盖,94
‑
红外塑前盖,95
‑
红外窗口片,96
‑
红外机芯,97
‑
密封垫片;
[0057]
101
‑
减震器,103
‑
陀螺仪组件;
[0058]
111
‑
轴承,112
‑
轴承盖板,113
‑
挡块,114
‑
轴承安装件,115
‑
转接架,116
‑
限位挡块;
[0059]
123
‑
俯仰电机编码器;
[0060]
131
‑
磁环转接件,132
‑
磁铁,133
‑
俯仰电机编码器安装片;
[0061]
14
‑
导电滑环,15
‑
交换机,16
‑
交换机安装板。
具体实施方式
[0062]
以下结合附图和具体实施例对本发明的内容作进一步详细描述。
[0063]
如图1至图4所示,本发明一种三轴自稳云台,包括固定顶架1、转腔组件2、中仓组
件3、航向电机4、横滚电机5、俯仰电机6、控制单元以及2个摄像功能组件。
[0064]
固定顶架1包括顶部腔体11和设置在顶部腔体11上的顶端安装板12,顶部腔体11为上端开口的空腔结构;顶端安装板12上设置有多个减震器101;
[0065]
转腔组件2位于固定顶架1的下侧,如图5和图6所示,转腔组件2包括腔体转座21、转腔连接板22和转座端盖23,腔体转座21为l形结构,其包括顶腔和侧腔,顶腔为上端开口的空腔结构,侧腔为内侧开口的空腔结构,转腔连接板22密封设置在顶腔的上端开口处,转座端盖23设置在侧腔内侧开口处;转腔连接板22中部向下凹,形成航向电机安装槽221。
[0066]
航向电机4设置在转腔连接板22的航向电机安装槽221内,且航向电机4的定子与顶部腔体11下底面固连,航向电机4的转子与转腔连接板22固连。
[0067]
横滚电机5位于侧腔内并安装在转座端盖23上,且横滚电机5的轴线与航向电机4的轴线垂直,横滚电机5的定子与转座端盖23固连。
[0068]
如图7和图8所示,中仓组件3位于腔体转座21顶腔的正下方;中仓组件3包括机仓中腔体31、中仓后盖32和中仓上盖33;机仓中腔体31为中空结构,其前端与横滚电机5的转子固连,中仓后盖32设置在机仓中腔体31的后端,中仓上盖33设置在机仓中腔体31上;机仓中腔体31的左侧板和右侧板上均开设有安装孔34。
[0069]
俯仰电机6通过电机转接板62安装在机仓中腔体31的内壁上,俯仰电机6定子的轴线与横滚电机5定子的轴线以及航向电机4转子的轴线均垂直;俯仰电机6转子(俯仰电机转轴61)的两端分别通过动环安装组件与2个摄像功能组件连接,2个摄像功能组件分别位于中仓组件3的两侧,本实施例2个摄像功能组件分别为摄像组件8和热红外组件9,摄像组件8和热红外组件9分别位于中仓组件3的左右两侧。
[0070]
以连接热红外组件9的动环安装组件为例,对动环安装组件具体结构进行具体说明,动环安装组件包括轴承111、轴承盖板112、挡块113、轴承安装件114、限位挡块116和转接架115,轴承安装件114固定在机仓中腔体31右侧板的安装孔34内,转接架115穿设在右侧板的轴承安装件114中,转接架115的内端与俯仰电机6转子同轴相连,转接架115的外端与热红外组件9相连;轴承111设置在轴承安装件114和转接架115之间,轴承安装件114上设有用于对轴承111外圈外端面限位的环形凸起,转接架115上设有用于对轴承111内圈外端面限位的环形凸起,转接架115上还安装有用于对轴承111内圈内端面限位的挡圈;轴承盖板112安装在轴承安装件114的内侧面上,用于对轴承111外圈内端面进行限位;挡块113为多个,沿圆周方向安装在轴承盖板112上,限位挡块116的一端与转接架115相连,另一端伸出转接架115,在俯仰电机6带动转接架115转动过程中,限位挡块116的另一端通过挡块113进行限位,实现云台俯仰角
‑
90
°
~10
°
的限位。在其他实施例中,2个摄像功能组件也可分别为短焦成像镜头和长焦成像镜头;或者,2个摄像功能组件均为多光谱相机;或者,2个摄像功能组件规格相同,均为成像组件,构成双目成像系统。
[0071]
如图9所示,本实施例摄像组件8包括与转接架115一端固连的摄像腔体81、设置在摄像腔体81两端的摄像头前盖82和摄像头后盖83、安装在摄像头前盖82上的摄像头镜片85和灯光镜片86、设置在摄像腔体81内且与摄像头镜片85相对的摄像机芯87、设置在摄像腔体81内且与灯光镜片86相对的白光灯板88以及安装在摄像头前盖82前侧的摄像前塑盖84,摄像前塑盖84对摄像头前盖82上的摄像头镜片85和灯光镜片86保护,灯光镜片86位于摄像头镜片85的外周;为了保证密封性,摄像腔体81与摄像头前盖82和摄像头后盖83之间均设
有橡胶密封垫89。
[0072]
如图10所示,本实施例热红外组件9包括与转接架115另一端固连的热红外腔体91、设置在热红外腔体91后端的腔后盖92、设置在热红外腔体91前端的热红外镜盖93、安装在热红外镜盖93上的红外窗口片95、设置在热红外腔体91内的红外机芯96以及安装在热红外镜盖93前侧的红外塑前盖94,红外塑前盖94对红外窗口片95保护;为了保证密封性,热红外腔体91与腔后盖92、热红外镜盖93之间均设有密封垫片97。
[0073]
控制单元包括俯仰电机驱动板73、安装在顶部腔体11内的航向电机驱动板71以及安装在腔体转座21内的横滚电机驱动板72,分别控制俯仰电机6、航向电机4和横滚电机5的转动;机仓中腔体31的顶板下表面还安装有交换机安装板16,交换机安装板16上安装有所述俯仰电机驱动板73,通过螺柱安装交换机15,本实施例交换机15为网络交换机。
[0074]
本实施例陀螺仪组件103设置在热红外组件9的热红外腔体91内,陀螺仪组件103包括三轴陀螺仪和三轴加速度传感器,用于获取云台的姿态数据;在其他实施例中,也可将陀螺仪组件103设置在摄像组件8的摄像腔体81内;为了减小航向漂移对姿态数据的影响,还可在固定顶架1内安装陀螺仪。
[0075]
本实施例云台在实际工作中,三轴陀螺仪会受到一定干扰或者某个轴向的转动角度过大,导致三轴陀螺仪反馈的姿态失真,从而使云台出现抖动和不稳定的现象。为此,本实施例在航向电机4、横滚电机5和俯仰电机6输出轴上分别设置航向电机编码器、横滚电机编码器和俯仰电机编码器123;航向电机编码器、横滚电机编码器和俯仰电机编码器123的输出端分别接航向电机驱动板71、横滚电机驱动板72和俯仰电机驱动板73。本实施例在航向电机4、横滚电机5和俯仰电机6输出轴上增加编码器,通过编码器的反馈来抵消三轴陀螺仪的干扰,以及改善转动角度过大的问题。至此,使得云台的稳定性得到大幅度提高,同时也使得各轴向的转动角度增大且稳定。
[0076]
为了便于俯仰电机编码器123的安装,在其中一个动环安装组件的转接架115与俯仰电机6转子之间设有磁环组件,磁环组件包括磁环转接件131、磁铁132和俯仰电机编码器安装片133,磁环转接件131为空心结构,两端分别与俯仰电机转轴、转接架115固定安装,磁环转接件131与转接架115相连的一端沿周向设有缺口,磁铁132安装在俯仰电机转轴端部的磁铁安装孔内,俯仰电机编码器安装片133的一端与电机转接板62相连,另一端伸向磁环转接件131的缺口,且与磁铁132相对,俯仰电机编码器123安装在俯仰电机编码器安装片133与磁铁相对的位置,且俯仰电机编码器123中心与磁铁132中心相对在同一轴心线上,两者之间留有间隙1~2mm;在俯仰电机6带动磁环转接件131转动过程中,俯仰电机编码器安装片133对磁环转接件131的转动进行限位,也可实现云台俯仰角
‑
90
°
~10
°
的限位。
[0077]
本实施例航向电机4的中心轴位置、横滚电机5的中心轴位置均安装有导电滑环14,转接架115为中空结构,其内也安装有导电滑环14,导电滑环14内用于安装电机线、传感器线、编码器线,并连接在相应控制板上。
[0078]
三轴陀螺仪用于获取载体的运动姿态,通过采集到载体x,y,z轴的加速度、角速度及角度,从而得知载体当前姿态信息,同时通过计算得到实际姿态(当前姿态)与目标姿态的偏差量;将获得的姿态偏差量反馈给航向电机4、横滚电机5、和俯仰电机6,计算电机旋转控制量,进而通过航向电机驱动板71、横滚电机驱动板72、俯仰电机驱动73分别调整航向电机4、横滚电机5、和俯仰电机6的动作,使载体姿态回归到目标姿态。
[0079]
本实施例三轴自稳云台是实现目标物体姿态稳定控制的装置,使物体可以在运动中保持其姿态的静止。本实施例固定顶架1、转腔组件2、中仓组件3从上至下依次设置,将本实施例三轴自稳云台挂载于巡检机器人平台上,在巡检机器人正常行进条件下,应用自稳云台后,巡检机器人在运动过程中,通过航向电机4、横滚电机5、俯仰电机6,分别负责航向(方位)、横滚、俯仰、三个方向轴向的旋转,来稳定摄像组件8(摄像头)和热红外组件9(热红外镜头)的方向和姿态,以保持拍摄画面的清晰与稳定。在其他实施例中,固定顶架1、转腔组件2、中仓组件3也可从下至上依次设置,该三轴自稳云台可安装于行走在地面的轮式机器人上,以保持拍摄画面的清晰与稳定。
[0080]
本实施例整个工作过程描述:
[0081]
云台基本工作原理:发送指令信号
‑‑
电机按指令转动
‑‑
目标物体实现姿态调整;指令信号传感器自动控制,传出方式通过控制板,执行调整的是电机(航向电机4、横滚电机5、俯仰电机6,且为直流电机),实施自动控制。
[0082]
云台基本工作过程:当云台上电之初,会做一系列的自检过程,检测通讯总线是否正常,检测陀螺仪组件(三轴陀螺仪和三轴加速度传感器)是否正常,检测各个电机及驱动模块是否正常。当一系列自检工作完成后,如果没有人为指定初始云台姿态的话,则云台会保持水平姿态。如果,认为指定初始姿态,则自建完成后会保持设定好的姿态。
[0083]
云台自动控制流程:云台主控制单元实时采集摄像功能组件的姿态数据,当摄像功能组件姿态发生变化时,也会采集到摄像功能组件姿态变化后的姿态数据,根据采集到的姿态数据,通过滤波处理得到比较稳定的姿态变化量,再通过计算得到每个轴向上的姿态偏移量,将数据代入pid算法,由pid算法计算出最终的电机控制量,输出电信号给无刷电机驱动模组,由通过航向电机驱动板71、横滚电机驱动板72、俯仰电机驱动73分别调整航向电机4、横滚电机5、和俯仰电机6的动作,快速完成各自的姿态矫正,修正摄像功能组件的姿态,从而构成一个全闭环的控制系统。由于整个过程都在很短的时间内得以完成,看到的效果则是,相机框架(固定顶架、转腔组件、中仓组件)在晃动,但摄像功能组件始终保持较为稳定的姿态,从而使得摄像组件的拍摄画面更清晰流畅。
[0084]
云台主控模块始终在采集姿态
→
计算
→
驱动电机调整姿态
→
采集姿态数据;周而复始的做周期性的循环控制。
[0085]
自稳云台的角度调整:当需要对特定角度进行拍时,就需要人为的改变云台的姿态,来拍摄指定方位的物体。为此云台设计了可调整姿态的功能,通过发送包含三轴角度的指令,即可实现将云台的航向、横滚、俯仰转动到实际所需求的角度位置,同样能够实现自稳定。即便相机框架姿态发生变化,则摄像功能组件始终保持人为指定的姿态。
[0086]
自稳云台的航向跟随:在机器人运用当中,时常需要摄像功能组件能够跟着机器人的转动而转动,当机器人的转弯时,摄像功能组件也会以一定的速度跟着机器人一起转,即锁定航向轴。
[0087]
以上仅是对本发明的优选实施方式进行了描述,并不将本发明的技术方案限制于此,本领域技术人员在本发明主要技术构思的基础上所作的任何变形都属于本发明所要保护的技术范畴。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。