1.本发明涉及传感器技术领域,尤其涉及一种光学检测控制电路及控制方法。
背景技术:
2.在电子产品应用中,传感器(sensor)是一个不可缺少的重要模块,用来感应外部环境变化。传感器不仅能够感应温度、湿度、电压、电流及特殊物体等,还能够感应手势操作及周边物体的移动变化。传感器(sensor)种类繁多,半导体传感器也不断取代传统的传感器,尤其是光学领域。例如,通过光电鼠标取代传统的机械滚轮鼠标,光学手指导航(ofn)取代传统的机械遥感,方向识别取代传统的多个按键,近距离感应取代传统的机械按键及环境光检测取代人为判定操作等。然而,现有技术中的光学移动传感器模组需要外加ldo或外置电容,且外挂mcu进行二次处理符合人体的手感或操作方式;而近距离感应器模组及环境光检测模组是简单的光感芯片外加带高精度adc的mcu进行控制;这些传感器都需要mcu进行复杂的方案处理,外围需要相关器件进行补充,使传感器模组变得复杂,增加传感器模组本身的器件成本和加工成本,且产品应用环境和装配带来操作控制的不确定性。在上述的多种传感器应用中,采样不同的传感器器芯片及不同的mcu处理方案,为了配合应用环境和结构需要多种处理方案和封装,极大的增加了产品应用的开发周期及推广周期。如果应用产品需要同时使用上述两种或多种传感器时,需外加不同的传感器,增加了硬件成本和开发难度。因此,发明一种集成度高且能实现多种应用功能的光学检测控制电路及光学传感器是该领域技术人员亟待解决的问题。
技术实现要素:
3.本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种光学检测控制电路及控制方法。
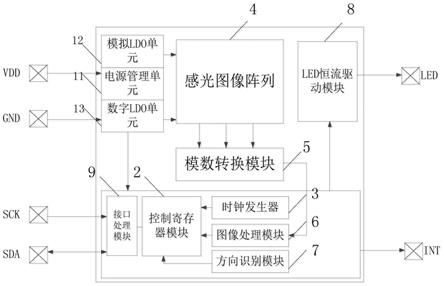
4.第一方面,本发明公开了一种光学检测控制电路,包括电源管理模块、控制寄存器模块、时钟发生器、感光图像阵列、模数转换模块、图像处理模块及方向识别模块;所述控制寄存器模块、所述时钟发生器、所述感光图像阵列、所述模数转换模块、所述图像处理模块及所述方向识别模块分别与所述电源管理模块电连接;所述感光图像阵列分别与所述模数转换模块及所述时钟发生器电连接;所述时钟发生器、所述模数转换模块、所述图像处理模块及所述方向识别模块分别与所述控制寄存器模块电连接;所述电源管理模块与电源输入端及地端电连接,所述控制寄存器模块分别与串行数据端、串行时钟端及信号输出端电连接。
5.优选地,所述一种光学检测控制电路还包括led恒流驱动模块;所述恒流驱动模块分别与所述电源管理模块、所述时钟发生器、所述控制寄存器模块及 led灯连接端电连接。
6.优选地,所述一种光学检测控制电路还包括接口处理模块;所述接口处理模块分别与所述电源管理模块及所述控制寄存器模块电连接;所述串行数据端及所述串行时钟端均与所述接口处理模块电连接。
7.优选地,所述电源管理模块包括电源管理单元、模拟ldo单元及数字ldo 单元;所述模拟ldo单元及所述数字ldo单元分别与所述电源管理单元电连接;所述模拟ldo单元与所述感光图像阵列电连接,所述控制寄存器模块、所述时钟发生器、所述模数转换模块、所述图像处理模块及所述方向识别模块分别与所述数字ldo单元电连接。
8.优选地,所述led恒流驱动模块包括第一场效应管、第二场效应管、第三场效应管、恒流源及电流配置开关;所述恒流源的第一端与所述电源管理模块电连接,所述恒流源的第二端分别与所述第一场效应管的漏极、所述第一场效应管的栅极、所述第二场效应管的栅极及所述电流配置开关的第一端电连接,所述第一场效应管的源极接地,所述第二场效应管的漏极分别与所述第三场效应管的漏极及所述led灯连接端电连接,所述第二场效应管的源极接地,所述第三场效应管的栅极与所述电流配置开关的第二端电连接,所述第三场效应管的源极接地。
9.优选地,所述模拟ldo单元包括第一放大器、第一电阻、第一滑动电阻及第一电容;所述第一放大器的同相输入端用于输入基准电压源,所述第一放大器的反相输入端分别与所述第一电阻的第一端及所述第一滑动电阻的第一端电连接,所述第一放大器的输出端分别与第一电阻的第二端、所述第一电容的第一端及模拟电源输出端电连接,所述第一滑动电阻的第二端接地,所述第一电容的第二端接地。
10.另一方面,本发明还公开一种光学检测控制方法,包括第一方面所述的一种光学检测控制电路,所述一种光学检测控制方法包括:
11.光学检测控制电路与红外led电连接,控制红外led曝光;
12.通过所述感光图像阵列采集图像信息;
13.将所述图像信息的模拟信号转换成数字信号;
14.对所述数字信号进行图像处理;
15.接收图像处理结果实现光学移动检测;
16.依据所述图像处理结果进行方向识别感应。
17.优选地,所述一种光学检测控制方法还包括:
18.获取所述感光图像阵列的图像转化数值;
19.依据所述图像转化数值实现近距离感应。
20.优选地,所述一种光学检测控制方法还包括:
21.依据所述感光图像阵列实现环境光检测。
22.优选地,所述对所述数字信号进行图像处理包括:
23.通过高斯图像滤波方式,将第一幅n*m的图像进行滤波处理成(n
‑
1)*(m
‑
1) 图像;
24.通过高斯图像滤波方式,将第二幅n*m的图像进行滤波处理成(n
‑
1)*(m
‑
1) 图像;
25.将处理后的所述第一幅n*m的图像及所述第二幅n*m的图像通过 lucas
‑
kanade光流算法,获取(vx,vy);
26.将(vx,vy)进行n次结果平滑处理;
27.通过fifo(先进先出)的方式,每次将fifo里的类容进行累加在除以n后将结果存储到控制寄存器模块。
28.本发明的提供的一种光学检测控制电路与控制方法具有如下有益效果,本发明公开的一种光学检测控制电路包括:电源管理模块、控制寄存器模块、时钟发生器、感光图像
阵列、模数转换模块、图像处理模块及方向识别模块;控制寄存器模块、时钟发生器、感光图像阵列、模数转换模块、图像处理模块及方向识别模块分别与电源管理模块电连接;感光图像阵列分别与模数转换模块及时钟发生器电连接;时钟发生器、模数转换模块、图像处理模块及方向识别模块分别与控制寄存器模块电连接;电源管理模块与电源输入端及地端电连接,控制寄存器模块分别与串行数据端、串行时钟端及信号输出端电连接。所述电源管理模块用于给电路可靠供电;所述感光图像阵列用于采集图像信息;所述模数转换模块用于将所述图像信息的模拟信号转换成数字信号;所述图像处理模块用于对所述数字信号进行图像处理;所述控制寄存器模块用于接收图像处理结果实现光学移动检测;所述方向识别模块用于依据所述图像处理结果进行方向识别感应。
29.本发明公开的一种控制方法,通过所述led恒流驱动模块、感光图像阵列及时序控制处理,采集相邻时间段led开启时的曝光图像与led关闭时的非曝光图像差值,实现近距离感应;通过所述感光图像阵列、图像处理模块及时序控制,采集不同的感光单元在相邻时间段的感光图像差值,实现环境光检测;此外,所述电源管理模块内置模拟ldo及数字ldo,无需外置电容,减小pad,节省芯片面积与绑线封装成本;无需外置电容及ldo,减少外围元器件和加工成本;所述led恒流驱动模块内置恒流,可以配置电流大小,省去外部限流电阻。
30.同时,本发明的所述图像处理模块、所述模数转换模块及所述led恒流驱动模块统一时序管理,显著提高抗干扰能力;光学传感器高度集成,完成图像采集与分析处理、光学移动、近距离感应等功能;简洁两线数据时钟接口,可以通过片外控制芯片读取相应结果。因此,本发明集成度高,能集中实现光学移动、方向识别、近距离感应及环境光检测功能,降低外围电路成本。
附图说明
31.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将结合附图及实施例对本发明作进一步说明,下面描述中的附图仅仅是本发明的部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图:
32.图1是本发明较佳实施例的一种光学检测控制电路的原理框图;
33.图2是本发明另一较佳实施例的一种光学检测控制电路的原理框图;
34.图3是本发明较佳实施例的一种光学检测控制电路的所述图像处理模块工作原理示意图;
35.图4是本发明较佳实施例的一种光学检测控制电路的所述图像处理模块平滑处理的工作原理示意图;
36.图5是本发明较佳实施例的一种光学检测控制电路的所述方向识别模块的工作原理示意图;
37.图6是本发明较佳实施例的一种光学检测控制电路的所述图像处理模块实现近距离感应的工作原理示意图;
38.图7是本发明较佳实施例的一种光学检测控制电路的所述图像处理模块实现近距离感应的时序图;
39.图8是本发明较佳实施例的一种光学检测控制电路的所述感光图像阵列实现环境光检测的工作原理示意图;
40.图9是本发明较佳实施例的一种光学检测控制电路的所述电源管理模块的电路图;
41.图10是本发明较佳实施例的一种光学检测控制电路的所述led恒流驱动模块的电路图;
42.图11是本发明较佳实施例的一种光学检测控制电路的感光阵列图像的采样控制电路图;
43.图12是本发明较佳实施例的一种光学传感器芯片可与外置控制器配合的应用原理图;
44.图13是本发明较佳实施例的一种光学传感器芯片的应用结构示意图;
45.图14是本发明较佳实施例的一种光学检测控制方法的流程图;
46.图15是本发明另一较佳实施例的一种光学检测控制方法的流程图;
47.图16是本发明较佳实施例的一种光学检测控制方法的图像处理与分析运算流程图。
具体实施方式
48.为了使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的部分实施例,而不是全部实施例。基于本发明的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的保护范围。
49.实施例一
50.本发明较佳实施例的如图1所示,包括电源管理模块1、控制寄存器模块2、时钟发生器3、感光图像阵列4、模数转换模块5、图像处理模块6及方向识别模块7;控制寄存器模块2、时钟发生器3、感光图像阵列4、模数转换模块5、图像处理模块6及方向识别模块7分别与电源管理模块1电连接;感光图像阵列4分别与模数转换模块5及时钟发生器3电连接;时钟发生器3、模数转换模块5、图像处理模块6及方向识别模块7分别与控制寄存器模块2电连接;电源管理模块1与电源输入端vdd及地端gnd电连接,控制寄存器模块2分别与串行数据端sda、串行时钟端sck及信号输出端int电连接。所述感光图像阵列4 用于采集图像信息;所述模数转换模块5将所述图像信息的模拟信号转换成数字信号;所述图像处理模块6用于对所述数字信号进行图像处理;所述控制寄存器模块2用于接收图像处理结果实现光学移动检测;所述方向识别模块7用于依据所述图像处理结果进行方向识别感应。因此,本发明集成度高,能集中实现光学移动、方向识别、近距离感应及环境光检测功能,降低外围电路成本。
51.优选地,在本实施例中,通过所述模数转换模块5将所述感光图像阵列4 的每个图像(pixel)单元的图像值进行模数转换采集,得到一整帧图像后送到所述图像处理模块6进行图像处理。在本实施例中,所述图像处理模块6通过高斯图像滤波方式,将一副n*m的图像进行滤波处理成(n
‑
1)*(m
‑
1)图像。如图3所示为例,将一副8*8的图像阵列处理成6*6;以图像单元b2进行处理为b2,公式如下:
52.53.以此类推,得到一幅滤波处理过的图像;接下来重新再采集一帧图像,同样进行高斯滤波处理;将两幅处理后的图像通过lucas
‑
kanade光流算法,具体公式推导如下:
54.当图像特征a在t帧时坐标为(x1,y1),在t 1帧得坐标为(x2,y2)。则得出:
55.(u,v)=(x1,y1)
‑
(x2,y2)
56.在两帧图像用同样的曝光强度可以得出:
57.i(x,y,t)=i(x δx,y δy,t δt)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ①
58.将公式
①
的右边通过泰勒公式展开:
[0059][0060]
根据公式
①
、
②
得到如下公式:
[0061][0062]
或者如下表示:
[0063][0064]
将公式
④
简写为:
[0065]
ixvx iyvy=
‑
it
ꢀꢀꢀꢀꢀꢀꢀ⑤
[0066]
在一整帧图像做差分计算,得到公式如下:
[0067][0068]
而为了得到(vx,vy),将公式
⑥
进行转换。
[0069][0070]
将每相邻两帧图像进行计算出(vx,vy),每次计算后的结果进行累加,然后存储到控制寄存器模块2,为了得到更符合人体感知效果,对累加结果进行平滑处理。如图4所示,将(vx,vy)进行n次结果平滑处理,通过fifo(先进先出)的方式,每次将fifo里的类容进行累加在除以n后将结果存储到控制寄存器模块2。
[0071]
在一个优选地实施例中,本实施例的所述方向识别模块用于进行手势感应以实现方向识别。在所述图像处理模块6中得到了(vx,vy),考虑到人为控制每次操作完后会有一定的间隙时间再进行下一次操作,这个间隙时间会大于 200毫秒,将从检测到移动的开始至停止移动时间大于100毫秒为一个整体,将这个时间段计算出x,y的移动值全部累加起来得到∑vx,∑vy。
[0072]
如图5左边所示,
[0073]
当|∑vx|>|∑vy|且∑vx>0;此时判定的手势操作的方向为“右”;
[0074]
当|∑vx|>|∑vy|且∑vx<0;此时判定的手势操作的方向为“左”;
[0075]
当|∑vx|<|∑vy|且∑vy>0;此时判定的手势操作的方向为“前”;
[0076]
当|∑vx|<|∑vy|且∑vy<0;此时判定的手势操作的方向为“后”;
[0077]
如图5右边所示,
[0078]
当|∑vx|>2*|∑vy|且∑vx>0;手势操作为“右”;
[0079]
当2*|∑vy|>|∑vx|>1/2*|∑vy|且∑vx>0;∑vy>0;手势操作为“右前”;
[0080]
当|∑vx|>2*|∑vy|且∑vx<0;手势操作为“左”;
[0081]
当2*|∑vy|>|∑vx|>1/2*|∑vy|且∑vx<0;∑vy>0;手势操作为“左前”;
[0082]
当|∑vy|>2*|∑vx|且∑vy>0;手势操作为“前”;
[0083]
当2*|∑vx|>|∑vy|>1/2*|∑vx|且∑vx>0;∑vy<0;手势操作为“右后”;
[0084]
当|∑vy|>2*|∑vx|且∑vy<0;手势操作为“后”;
[0085]
当2*|∑vx|>|∑vy|>1/2*|∑vx|且∑vy<0;∑vx<0;手势操作为“左后”;
[0086]
优选地,请参阅图2,所述一种光学检测控制电路还包括led恒流驱动模块 8;所述恒流驱动模块8分别与所述电源管理模块1、所述时钟发生器3、所述控制寄存器模块2及led灯连接端电连接。
[0087]
优选地,所述一种光学检测控制电路还包括接口处理模块9;所述接口处理模块9分别与所述电源管理模块1及所述控制寄存器模块2电连接;所述串行数据端sda及所述串行时钟端sck均与所述接口处理模块9电连接。
[0088]
在一个优选地实施例中,本发明还能实现近距离感应。当目标物体靠近所述感应图像阵列的感光区时图像的转化数值会发生变化,若没有目标物体靠近时得到图像的数值为p0,当靠近时得到图像值为p1,设置阈值pth,则当p1
ꢀ‑
p0>pth时,检测到有目标物体靠近,反之,则没有物体靠近。为了得到更细分的结果,本实施例设置不同的阈值pth0,pth1,
…
pthn,从而获取目标物体靠近的不同程度;在算图像值时可以用一整帧图像累加取平均(∑pn*m/n*m) 也可以通过图像取点方式,如图6左图,在图像中间取点后做平均即(pc3 pc6 pf3 pf6)/4;也可通过取图像中间某一片区域,如图6右图,(pd4 pd5 pe4 pe5)/4;同样做平均,这样可以得到较理想的图像值。然而由于外部应用环境非常复杂,当外部环境光发生变化时容易导致误触发,需要内部进行时序处理及led曝光控制;如图7所示,先将图像进行复位,按设定的曝光时间进行环境光曝光,采样后进行adc转换得到p0,再将图像复位,打开led (根据应用需求预先设置好所述led驱动模块中的驱动电流),用相同的时间将图像进行环境光加led曝光,得到图像值p1,如果没有目标物体靠近,此时 p0与p1值比较接近;当目标物体靠近时p1>p0;当p1
‑
p0>pth时光学传感器芯片上方有目标物体遮挡,为了得到更准确的结果,可以多次检测来进行确认。将(p1
‑
p0)进行时间统计,可以得出目标物体在上或下两个方向进行操作,在手势识别上增加了第三维的方向。若p1
‑
p0>pth且(p1
‑
p0) 基本不变,则可以识别成“悬停”操作。
[0089]
在一个优选地实施例中,本发明还能实现环境光检测。一般环境中红外光和可见光能量较大,而紫外光能量较小,因此,只需要将环境中的红外光滤除就可以得出可见光的环境光大小。
[0090]
如图8所示,将感光阵列分成很多个均匀相等的小区域,其中灰色部分的感光单元
镀上红外滤光膜(波长大于800纳米可以通过),分别统计镀膜与无镀膜区域的图像值取平均得到px、py;(py
–
px)即可得到可见光(即环境光)的图像值;图像处理模块6将计算结果存储到控制寄存器模块2;当在应用时得到(py
–
px),通过查找表值即可得到环境光的大小。
[0091]
优选地,请参阅图2,所述电源管理模块1包括电源管理单元11、模拟ldo 单元12及数字ldo单元13;所述模拟ldo单元12及所述数字ldo单元13分别与所述电源管理单元11电连接;所述模拟ldo单元12与所述感光图像阵列4 电连接,所述控制寄存器模块2、所述时钟发生器3、所述模数转换模块5、所述图像处理模块6及所述方向识别模块7分别与所述数字ldo单元13电连接。
[0092]
优选地,请参阅图9,所述模拟ldo单元包括第一放大器l2、第一电阻r1、第一滑动电阻r2及第一电容c0;所述第一放大器l2的同相输入端用于输入基准电压源,所述第一放大器l2的反相输入端分别与所述第一电阻r1的第一端及所述第一滑动电阻r2的第一端电连接,所述第一放大器l2的输出端分别与第一电r1阻的第二端、所述第一电容c0的第一端及模拟电源输出端ldoa电连接,所述第一滑动电阻r2的第二端接地,所述第一电容c0的第二端接地。在本实施例中,所述数字ldo单元的电路结构与所述模拟ldo单元的电路结构相同,在此不再赘述。
[0093]
优选地,请参阅图10,所述led恒流驱动模块8包括第一场效应管q1、第二场效应管q2、第三场效应管q3、恒流源t1及电流配置开关d1;所述恒流源 t1的第一端与所述电源管理模块1电连接,所述恒流源t1的第二端分别与所述第一场效应管q1的漏极、所述第一场效应管q1的栅极、所述第二场效应管q2 的栅极及所述电流配置开关d1的第一端电连接,所述第一场效应管q1的源极接地,所述第二场效应管q2的漏极分别与所述第三场效应管q3的漏极及所述 led灯连接端电连接,所述第二场效应管的源极接地,所述第三场效应管的栅极与所述电流配置开关d1的第二端电连接,所述第三场效应管q3的源极接地。可以理解的是,在本实施例中,所述电流配置开关d1用于用来控制电流的大小,以调节外接led的曝光强度。
[0094]
优选地,请参阅图11,本发明通过如图11的图像采样电路控制图,对所述感光阵列图像进行图像采样;系统先发起rst信号,对d0节点进行充电,待曝光时间结束时通过打开smp0进行感光电压采样,采样电压存入c3,通过打开 smp1给adc进行电压采样,由adc转换成数字电压值。
[0095]
优选地,在本实施例中,当光学传感器芯片在一定的时间内没有检测任何操作时,光学传感器芯片进入周期性操作(即睡眠状态),整个周期分为工作时间和睡眠时间。为了达到即省功耗又不会遗漏任意一次操作,配置相应的工作周期和工作时间。
[0096]
光学传感器芯片进入睡眠状态,在工作期间光学传感器芯片的工作电流为: 1ma;而在睡眠时芯片的待机功耗:2ua。设定芯片的睡眠的周期为50ms;工作时间为:1ms,从而获取平均电流:
[0097]
iavg=(1ma*1ms 50ms*2ua)/50ms=22ua;在另一个优选地实施例中,根据应用的需要可以调整睡眠周期和工作时间,从而达到合适的待机功耗,在此不作具体限定。
[0098]
实施例二
[0099]
本发明还公开了一种光学检测控制方法,包括第一方面所述的一种光学检测控制电路,请参阅图14,所述一种光学检测控制方法包括:
[0100]
s1、光学检测控制电路与红外led电连接,控制红外led曝光;
[0101]
s2、通过所述感光图像阵列采集图像信息;
[0102]
s3、将所述图像信息的模拟信号转换成数字信号;
[0103]
s4、对所述数字信号进行图像处理;
[0104]
s5、接收图像处理结果实现光学移动检测;
[0105]
s6、依据所述图像处理结果进行方向识别感应。
[0106]
优选地,请参阅图15、所述一种光学检测控制方法还包括:
[0107]
s7、获取所述感光图像阵列的图像转化数值;
[0108]
s8、依据所述图像转化数值实现近距离感应。
[0109]
优选地,所述一种光学检测控制方法还包括:
[0110]
s9、依据所述感光图像阵列实现环境光检测。
[0111]
优选地,请参阅图16,所述对所述数字信号进行图像处理包括:
[0112]
s31、通过高斯图像滤波方式,将第一幅n*m的图像进行滤波处理成(n
‑
1) *(m
‑
1)图像;
[0113]
s32、通过高斯图像滤波方式,将第二幅n*m的图像进行滤波处理成(n
‑
1) *(m
‑
1)图像;
[0114]
s33、将处理后的所述第一幅n*m的图像及所述第二幅n*m的图像通过 lucas
‑
kanade光流算法,获取(vx,vy);
[0115]
s34、将(vx,vy)进行n次结果平滑处理;
[0116]
s35、通过fifo(先进先出)的方式,每次将fifo里的类容进行累加在除以 n后将结果存储到控制寄存器模块2。
[0117]
实施例三
[0118]
优选地,请参阅图12,本发明的光学传感器芯片可与外置控制器配合使用,将光学移动、方向识别、近距离感应及环境光检测等功能获取的数据通过信号输出端int、串行数据端sda及串行时钟端sck传输到外置控制器,以应用在不同的场景,功能完善,高度集成,改善用户体验。
[0119]
实施例四
[0120]
优选地,请参阅图13,图13为本发明所述的光学检测控制电路对应的光学传感器芯片应用结构示意图。光学传感器芯片表面覆盖有凸起形状的透光镜头,遮光壳体罩住光学传感器芯片,遮光壳体上设置有导光孔,导光孔位于透光镜头的正上方位置;红外led位于遮光壳体外部,光学传感器芯片与红外led电连接,光学传感器芯片控制红外led发射红外光线,红外led发射的红外光线遇到目标物体时反射回来的红外光线通过导光孔传入到遮光壳体内部,进一步地,红外光线经过透光镜头聚集到光学传感器芯片,并经过光学传感器芯片内部的感光图像采集与运算处理,从而实现对目标物体的检测,如目标物体的位置距离、运动方向等接近感应状态。通过光学传感器芯片、透光镜头以及遮光壳体的结合,提高了光学传感器的检测灵敏度,降低了外部环境光对光学传感器的干扰。
[0121]
综上所述,本发明所提供的一种光学检测控制电路包括电源管理模块1、控制寄存器模块2、时钟发生器3、感光图像阵列4、模数转换模块5、图像处理模块6及方向识别模块7;控制寄存器模块2、时钟发生器3、感光图像阵列4、模数转换模块5、图像处理模块6及方向识
别模块7分别与电源管理模块1电连接;感光图像阵列4分别与模数转换模块5及时钟发生器3电连接;时钟发生器3、模数转换模块5、图像处理模块6及方向识别模块7分别与控制寄存器模块2电连接;电源管理模块1与电源输入端vdd及地端gnd电连接,控制寄存器模块2分别与串行数据端sda、串行时钟端sck及信号输出端int电连接。所述感光图像阵列4用于采集图像信息;所述模数转换模块5将所述图像信息的模拟信号转换成数字信号;所述图像处理模块6用于对所述数字信号进行图像处理;所述控制寄存器模块2用于接收图像处理结果实现光学移动检测;所述方向识别模块7用于依据所述图像处理结果进行方向识别感应。
[0122]
本发明公开的一种控制方法,通过所述led恒流驱动模块、感光图像阵列及时序控制处理,采集相邻时间段led开启时的曝光图像与led关闭时的非曝光图像差值,实现近距离感应,通过所述感光图像阵列、图像处理模块及时序控制,采集不同的感光单元在相邻时间段的感光图像差值,实现环境光检测。此外,所述电源管理模块内置模拟ldo及数字ldo,无需外置电容,减小pad,节省芯片面积与绑线封装成本;无需外置电容及ldo,减少外围元器件和加工成本;所述led恒流驱动模块内置恒流,可以配置电流大小,省去外部限流电阻。
[0123]
同时,本发明的所述图像处理模块、所述模数转换模块及所述led恒流驱动模块统一时序管理,显著提高抗干扰能力;光学传感器高度集成,完成图像采集与分析处理、光学移动、近距离感应等功能;简洁两线数据时钟接口,可以通过片外控制芯片读取相应结果。因此,本发明集成度高,能集中实现光学移动、方向识别、近距离感应及环境光检测功能,降低外围电路成本。
[0124]
以上对本发明所提供的一种光学检测控制电路及控制方法进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容仅为本发明的实施方式,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。