1.本技术涉及控制系统的领域,尤其是涉及一种门板卸装车的控制系统。
背景技术:
2.在防盗门等钣金类物体的搬运工作中,通常使用卸装车对货物进行搬运。工人在装货位置将防盗门等钣金类货物搬移到卸装车上,而后驱动卸装车移动到卸货位置,将货物卸车即可,便于节省人力。
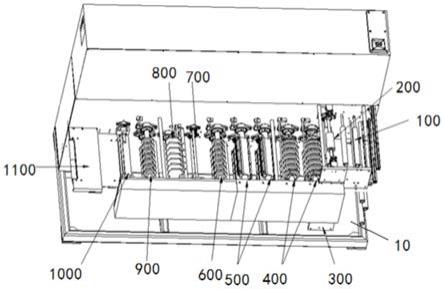
3.相关技术中的卸装车如图1所示,包括车体,车体上安装有用于承托货物的支撑架,支撑架整体呈l形,与车体转动设置;支撑架的下端滑动设置有用于承托货物的舌板,当需要装载的货物较多时,即可驱动舌板,将货物搭载在舌板上,提高卸装车的容纳量。
4.针对上述中的相关技术,发明人认为在运输例如防盗门或门板等体积较大的货物时,工人驱动车体移动,但工人的视线容易受到货物的阻挡,无法较为安全有效的驱动车体。因此工人们只能选择倒退行走的方式运输,但此种方式在达到卸货位置时,需要一定空间转动车体,影响了货物的装卸效率。
技术实现要素:
5.为了有助于提高货物搬运时卸装车行走安全性和便于提高装卸效率,本技术提供一种门板卸装车的控制系统。
6.本技术提供的一种门板卸装车的控制系统采用如下的技术方案:
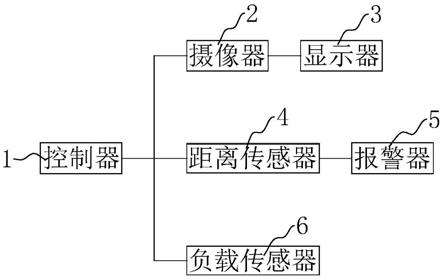
7.一种门板卸装车的控制系统,包括安装在车体前端的摄像器、设置在车体后端的显示器和控制器,所述摄像器与所述显示器和所述控制器均电连接;
8.所述摄像器用于拍摄影像并将影像传输给所述显示器;所述显示器用于将接收到的影像显示;
9.所述控制器用于控制摄像器的开启和关闭。
10.通过采用上述技术方案,在车体空载时,工人驱动车体移动即可;当车体上放置有体积较大的货物时,工人通过控制器开启摄像器,同时开启显示器,摄像器拍摄到车体前方的影像,工人通过显示器进行查看,便于工人在驱动车体时,能够实时获知车体前方的路况,从而便于提高货物搬运时卸装车行走安全性。此外,由于工人能够实时获知车体前方的路况,因此车体无需倒退行走,也就无需在卸货时转动车体,便于提高装卸效率。
11.可选的,所述控制器电连接有安装在车体前端的距离传感器,用于检测车体行驶方向上的物体与车体前端间的距离,生成距离数据,并将距离数据传输给所述控制器;所述控制器用于接收距离数据,并根据距离数据控制车体的停止。
12.通过采用上述技术方案,控制器通过获取的距离数据控制车体的停止,当车体移动到卸货或装货位置时,车体因控制器的控制自动停止。便于提高车体停车位置的精度,从而便于工人卸货或装货,有助于提高装卸效率。此外,当车体在运行过程中,行驶方向上突然出现工人或物品时,控制器能够控制车体停止,便于提高卸装车行走安全性。
13.可选的,所述距离传感器电连接有报警器,所述报警器用于接收距离传感器传输的距离数据,并当距离数据小于预设的距离阈值时,进行报警。
14.通过采用上述技术方案,即使控制器能够根据距离数据控制车体的启停,但有了报警器的报警,一方面有助于提醒工人,车体已到达指定位置,促使工人装货或卸货,提高装卸效率;另一方面便于警示工人,使工人得知车体即将制动,避免工人跟车时与车体发生碰撞。
15.可选的,所述控制器电连接有安装在车体上的负载传感器,所述负载传感器用于检测车体上的货物负载,生成负载数据,并将负载数据传输给控制器;所述控制器用于接收负载数据,并根据负载数据控制车体的行驶速度。
16.通过采用上述技术方案,根据车体的负载控制车体的行驶速度,科学、合理,且有助于提高装卸效率和运输效率。
17.可选的,所述摄像器安装在车体前端的下方。
18.通过采用上述技术方案,便于拍摄到更低位置的影像,从而使工人在观察显示器上的影像时,能够实时观察到车体前方的地面情况,保证车体的行走安全性。
19.可选的,还包括安装在车体前端两侧的侧视摄像头,用于拍摄车体两侧的侧边影像;所述侧视摄像头与所述显示器和控制器均电连接,所述侧视摄像头用于将侧边影像传输给所述显示器,所述显示器用于接收并显示侧边影像;所述控制器用于控制侧视摄像头的开启和关闭。
20.通过采用上述技术方案,除了车体前方的路况信息需要被工人得知外,车体两侧的影像也有助于保证卸装车的行走安全性,使工人在驱动车体移动时,车体或者车体上的货物不易与车体两侧的物体接触。
21.可选的,所述车体的两侧均设有挡料板,所述挡料板的一端设有与车体连接的动力缸,所述挡料板与所述动力缸的活塞杆连接;所述动力缸与控制器电连接。
22.通过采用上述技术方案,挡料板具有限制车体上货物向两侧移动的作用,使货物不易因车体的抖动、倾斜脱离车体,有助于提高货物搬运时卸装车的行走安全性。货物不易脱离车体,使运货过程中无需中途停车,便于保证货物的装卸效率。
23.可选的,所述挡料板上设有与控制器电连接的电磁铁,所述控制器用于控制所述电磁铁的通电和断电。
24.通过采用上述技术方案,装货后,控制器控制电磁铁通电,电磁铁对车体上的金属货物产生吸附力,提高车体上货物的稳定性,使货物不易脱离车体。
25.综上所述,本技术包括以下至少一种有益技术效果:
26.1.装货完成后,工人通过操控控制器开启摄像器,同时开启显示器,驱动卸装车向前移动,期间工人通过显示器查看卸装车前方路况,保证卸装车行走安全性,到达卸货位置后,停车卸货即可,无需其他多余操作,便于提高装卸效率;
27.2.距离传感器生成距离数据,控制器根据距离数据控制车体的启停,便于提高车体停车位置的精确度,从而便于工人卸货或者装货,有助于提高装卸效率;
28.3.根据负载传感器检测的负载数据控制车体行驶速度,使负载小时,车体行驶较快,负载大时,车体行驶较慢,提高运货稳定性,保证装卸效率和卸装车的行走安全性。
附图说明
29.图1是本技术实施例的一种门板卸装车的控制系统的卸装车整体结构示意图;
30.图2是本技术实施例1的一种门板卸装车的控制系统的结构示意图;
31.图3是本技术实施例2的一种门板卸装车的控制系统的结构示意图;
32.图4是本技术实施例2的一种门板卸装车的控制系统的挡料板相关结构示意图。
33.附图标记说明:1、控制器;2、摄像器;3、显示器;4、距离传感器;5、报警器;6、负载传感器;7、侧视摄像头;8、挡料板;81、动力缸;82、电磁铁;9、车体;91、支撑架;911、第一支撑部;912、第二支撑部;92、舌板;93、第一液压缸;94、第二液压缸。
具体实施方式
34.以下结合附图1
‑
3对本技术作进一步详细说明。
35.参照图1,卸装车包括车体9,车体9上转动设置有用于承托货物的支撑架91,支撑架91包括竖直设置的第一支撑部911和水平设置的第二支撑部912,第二支撑部912与第一支撑部911的下端连接。第一支撑部911和第二支撑部912使支撑架91整体呈l形。第二支撑部912中滑动设置有舌板92,舌板92靠近第一支撑部911的一侧设有第一液压缸93,第一液压缸93与支撑架91转动连接,舌板92与第一液压缸93的活塞杆连接。车体9上安装有第二液压缸94,第二液压缸94的活塞杆与第一支撑部911转动设置。
36.第二支撑部912远离第一支撑部911的一端视为车体9的前端,第一支撑部911远离第二支撑部912的一端视为车体9的后端。将货物装车后,车体9向前行走,指车体9前端位于行走方向的前方;相对的,车体9倒退行走,指车体9后端位于行走方向的前方。
37.本技术实施例公开一种门板卸装车的控制系统。
38.实施例1
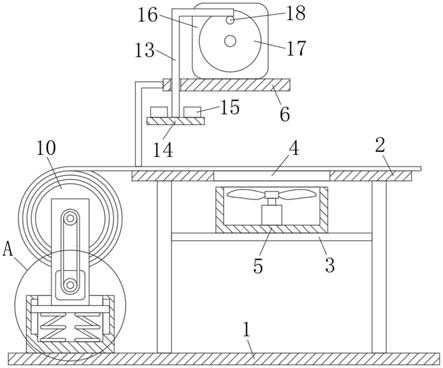
39.参照图1和图2,一种门板卸装车的控制系统包括控制器1、摄像器2、显示器3、距离传感器4和负载传感器6。摄像器2安装在车体9前端的下方,用于拍摄车体9向前行走时,车体9前方的影像;摄像器2与显示器3电连接,用于将拍摄到的影像传输给显示器3。显示器3用于接收摄像器2传输的影像,并将影像显示在显示器3上,供工人查看。工人在运输门板等体积较大,高度较高的货物时,通过显示器3实时查看车体9前方的路况,从而保证卸装车的行走安全性。由于工人能够实时查看到车体9前方的路况,也就无需驾驶车体9倒退行走,使车体9达到卸货位置后,可直接卸货,无需旋转车体9,方便快捷,有助于提高装卸效率。
40.参照图1和图2,控制器1与摄像器2电连接,用于控制摄像器2的开启和关闭。控制器1可以是mcu、单片机或plc控制系统。控制器1和显示器3均安装在车体9的后端,便于车体9在向前行走时,工人操作控制器1和观看显示器3上的影像。
41.参照图1和图2,距离传感器4安装在车体9前端,与控制器1电连接。距离传感器4用于检测车体9行驶方向上的物体与车体9前端之间的距离,从而生成距离数据,将距离数据传输给控制器1。具体的,距离传感器4可以是红外线传感器、接近传感器或雷达传感器。
42.控制器1接收到距离传感器4传输的距离数据后,根据距离数据控制车体9的停止。具体的,控制器1中预先设置有距离阈值,距离阈值人为设定,例如在本实施例中,距离阈值等于舌板92的长度;在另一实施例中,距离阈值也可以大于舌板92的长度,且小于舌板92长度的1.5倍。当控制器1接收到的距离数据等于或小于距离阈值时,控制器1控制车体9减速
并停止。一方面,当车体9的行驶路径上突然出现障碍物时,工人来不及停车,控制器1制动车体9,便于提高安全性;另一方面,当车体9行驶到装货位置或者卸货位置时,无需工人手动制动车体9,控制器1即可控制车体9减速并停止,有助于提高车体9的位置控制精度,从而便于装货或卸货。
43.参照图1和图2,距离传感器4电连接有报警器5,报警器5用于接收距离传感器4传输的距离数据,并当距离数据等于或小于预设的距离阈值时,进行报警。需要说明的是,报警器5中的距离阈值与控制器1中的距离阈值相同。报警器5可以是独立于距离传感器4设置的,也可以集成在距离传感器4中,或使用具有报警功能的距离传感器4。
44.参照图1和图2,负载传感器6安装在车体9上,用于检测车体9上的货物负载,生成负载数据。在本实施例中,负载传感器6安装在第二支撑部912的下方,用于检测支撑架91上的负载。负载传感器6可以是称重传感器或压力传感器,负载传感器6与控制器1电连接,用于将负载数据传输给控制器1。控制器1用于接收负载数据,并根据负载数据控制车体9的行驶速度。具体的,负载越大,行驶速度越小,便于保证卸装车的行走安全性和货物的稳定性。当卸装车空载时,控制器1控制车体9的行驶速度达到最大值,便于车体9的快速移动,提高装卸效率。
45.实施例1的实施原理为:需要装货时,工人驱动车体9移动至货物附近,距离传感器4不断将距离数据传输给控制器1,当车体9前端距离货物只有一个舌板92的长度时,控制器1控制车体9停止。而后控制器1控制舌板92伸出,工人将货物装到车体9上;期间负载传感器6不断将负载数据传输给控制器1。
46.装货完成后,控制器1根据负载数据限制车体9的最大行驶速度,工人驱动车体9向卸货位置移动。期间工人通过显示器3观看车体9行驶路径上的路况,以保证车体9的安全行走。
47.当车体9移动到卸货位置附近,且车体9前端距离卸货位置只有一个舌板92长度时,控制器1控制车体9停止,同时控制舌板92收回。舌板92上的货物自动掉落在卸货区域,便于提高装卸效率。
48.实施例2
49.参照图3和图4,一种门板卸装车的控制系统包括安装在车体9前端两侧的侧视摄像头7,侧视摄像头7用于拍摄车体9两侧的侧边影像。侧视摄像头7与显示器3和控制器1均电连接,侧视摄像头7用于将侧边影像传输给显示器3。显示器3接收到侧边影像后,将侧边影像与摄像器2传输的影像同屏显示。便于工人同时获知车体9前方和侧前方的路况,较大程度的保证车体9的行走安全性。控制器1用于控制侧视摄像头7的开启和关闭,便于工人操作。
50.参照图3和图4,车体9的两侧均固定连接有水平设置的动力缸81,动力缸81与控制器1电连接,控制器1用于控制动力缸81动作。动力缸81的活塞杆上连接有水平设置的挡料板8,两个挡料板8用于对车体9上的货物进行限位,使货物在运输过程中不易脱离车体9,提高货物的稳定性。
51.参照图3和图4,两个挡料板8相对的侧面上均安装有若干电磁铁82,电磁铁82均与控制器1电连接,控制器1用于控制电磁铁82的通电和断电。当车体9上运输的是钣金类或金属类货物时,工人可通过操控控制器1为电磁铁82通电,使电磁铁82吸附车体9上的货物,提
高货物的稳定性。
52.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。