1.本发明涉及有机溶剂清洗机技术领域,具体涉及一种有机溶剂清洗机专用清洗筐的自动抓取装置。
背景技术:
2.目前,我国在对加工完的工件进行有机溶剂清洗,目的是将零件外表面的切削液取出,但现有的技术是将大量的工件放入到清洗筐中,清洗筐的两侧中部分别设有一个把手,且把手与清洗筐的两侧边缘处为铰连接,利用一个长条板穿过两个把手,且长条板上表面的两侧设有一个凹槽,该凹槽用于固定把手,且该长条板上表面的中部设有一个吊耳,再利用吊车将这个清洗筐放入到有机溶剂的水池中进行清洗,但在移动的过程中,容易使清洗框出现侧倾的现象,导致清理筐失去平衡,严重时使零件从筐中滑落出来。
3.综上所述,现有的技术在对清洗筐进行吊装移动时间,容易使清洗框侧倾,导致清理筐失去平衡,严重时使零件从筐中滑落出来,又因筐中装有大量的零件,质量较大,操作时费时费力,从而导致工作效率较低的问题。
技术实现要素:
4.本发明为解决现有的技术在对清洗筐进行吊装移动时间,容易使清洗框侧倾,导致清理筐失去平衡,严重时使零件从筐中滑落出来,又因筐中装有大量的零件,质量较大,操作时费时费力,从而导致工作效率较低的问题,而提出一种有机溶剂清洗机专用清洗筐的自动抓取装置。
5.本发明的一种有机溶剂清洗机专用清洗筐的自动抓取装置,其组成包括抓取盖板、两个挡板、工型滑道、电机支架、电机、齿轮、两个齿条、支撑杆、凸轮、气缸和固定板;
6.抓取盖板包括顶板和两个立板,顶部的两侧中部分别设有一个立板,每个立板底端的正面设有一个通孔,通孔内部设有一个传动轴,传动轴的一端与驱动装置的输出端连接,传动轴的另一端与凸轮的中心孔键槽连接,凸轮的端面底部设有一个支撑杆,支撑杆的端面上设有一个盲孔,该盲孔的内部嵌设有一个气缸,且气缸的输出端固定有固定板,抓取盖板的顶板下表面中央处沿纵向方向加工有一个长条形的通槽,通槽的内部设有两个工型滑道,且两个工型滑道平行对称设置,每个工型滑道上设有一个齿条,齿条与工型滑道滑动连接,两个齿条的有齿面相对设置,一个齿条的一端设有一个挡板,另一个齿条的一端设有另一个挡板,且两个挡板相对于清洗框的轴线对称设置,抓取盖板的顶板上表面中央处设有电机支架,电机支架上设有电机,电机的输出轴穿过抓取盖板的顶板之后,与齿轮固定连接,且齿轮设置在两个齿条之间,齿轮同时与两个齿条啮合;
7.进一步的,所述的固定板和两个挡板的端面分别设有一个压力传感器;
8.进一步的,所述的支撑杆的外表面设有一个压力传感器,且压力传感器的触控端面向抓取盖板的底面设置;
9.进一步的,所述的抓取盖板的顶板上表面的一侧设有一个方形凹槽,且凹槽的内
部嵌设有一个控制器;
10.进一步的,所述的凸轮的驱动装置为驱动电机;
11.进一步的,所述的固定板上的压力传感器的压力信号输出端与控制器的一号压力输出端连接,控制器的气缸驱动信号输出端与气缸连接,支撑杆上的压力传感器的压力信号输出端与控制器的二号压力输出端连接,控制器的一号驱动信号输出端与凸轮的驱动装置连接,挡板上的压力传感器的压力信号输出端与控制器的三号压力输出端连接,控制器的二号驱动信号输出端与电机连接;
12.进一步的,所述的抓取盖板上表面的四角处分别设有一个吊耳;
13.进一步的,在使用时,将抓取盖板放置在清洗框的上表面,此时启动电源,当两个挡板上的压力传感器未有压力信号输出时,控制器将驱动信号传递到电机上,此时电机驱动,电机的输出端带动齿轮转动,且齿轮的两侧分别与一个齿条啮合,是两个齿条在工型滑道做相对滑动,从而实现利用两个挡板对清洗筐进行夹紧,从而实现对清洗筐进行纵向的定心作业,当挡板上的压力传感器与清洗筐侧壁接触时,此时挡板上的压力传感器将压力信号传递到控制器中,控制器将停止信号传递到电机上,电机停车;
14.当固定板上的压力传感器未有压力信号输出时,控制器将气缸驱动信号传递到气缸,此时两个气缸同时启动,使气缸输出端上的固定板与清洗筐的外壁接触,此时完成对清洗筐的横向定心作业,当固定板上的压力传感器将压力信号传递到控制器,控制器将气缸复位信号传递到气缸,此时气缸复位;
15.当支撑杆上的压力传感器未有压力信号输出时,控制器将驱动信号传递到凸轮的驱动装置,此时凸轮转动,凸轮转动使支撑杆的高度升高,使支撑杆的外表面与把手的横梁接触,从而使支撑杆穿过把手,此时当支撑杆上的压力传感器将压力信号传递到控制器中,此时使控制器将停止信号传递到凸轮的驱动装置,两个凸轮停止转动,使两个凸轮上的支撑杆均穿过把手,此时启动气缸,使气缸的输出端伸出,利用固定板对把手进行一个限位的作用,此时利用抓取盖板上表面的四角处的吊耳与吊车的吊钩固定,使清洗筐移动至有机溶剂清洗池中。
16.本发明与现有技术相比具有以下有益效果:
17.本发明克服了现有技术的缺点,利用控制器对驱动装置和气缸进行自动控制,电机的输出端带动齿轮转动,且齿轮的两侧分别与一个齿条啮合,是两个齿条在工型滑道做相对滑动,从而实现利用两个挡板对清洗筐进行夹紧,从而实现对清洗筐进行纵向的定心作业;控制器将气缸驱动信号传递到气缸,此时两个气缸同时启动,使气缸输出端上的固定板与清洗筐的外壁接触,此时完成对清洗筐的横向定心作业;从而实现对清洗筐的自动定心作业;在移动清洗筐时,避免清洗筐失去平衡,防止零件从筐中滑落出来;
18.再利用凸轮转动,是支撑杆高度升高,使两个凸轮上的支撑杆均穿过把手,此时启动气缸,使气缸的输出端伸出,利用固定板对把手进行一个限位的作用,此时利用抓取盖板上表面的四角处的吊耳与吊车的吊钩固定,使清洗筐移动至有机溶剂清洗池中,从而实现对清洗筐的自动抓取作业,此种方式比较省时省力,工作效率较高。
附图说明
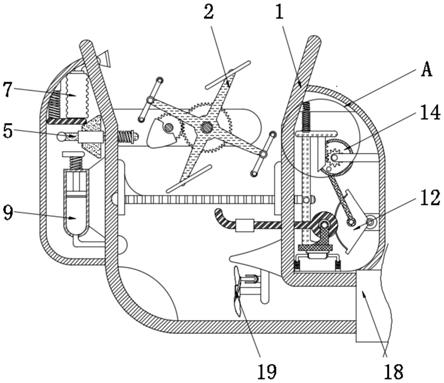
19.图1是本发明所述的一种有机溶剂清洗机专用清洗筐的自动抓取装置的主剖视
图;
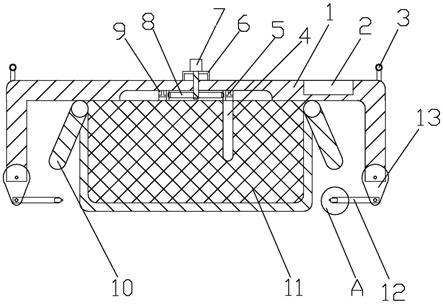
20.图2是本发明所述的一种有机溶剂清洗机专用清洗筐的自动抓取装置b处的放大示意图。
具体实施方式
21.具体实施方式一:结合图1和图2说明本实施方式,本实施方式所述的一种有机溶剂清洗机专用清洗筐的自动抓取装置包括抓取盖板1、两个挡板4、工型滑道5、电机支架6、电机7、齿轮8、两个齿条9、支撑杆12、凸轮13、气缸14和固定板15;
22.抓取盖板1包括顶板和两个立板,顶部的两侧中部分别设有一个立板,每个立板底端的正面设有一个通孔,通孔内部设有一个传动轴,传动轴的一端与驱动装置的输出端连接,传动轴的另一端与凸轮13的中心孔键槽连接,凸轮13的端面底部设有一个支撑杆12,支撑杆12的端面上设有一个盲孔,该盲孔的内部嵌设有一个气缸14,且气缸14的输出端固定有固定板15,抓取盖板1的顶板下表面中央处沿纵向方向加工有一个长条形的通槽,通槽的内部设有两个工型滑道5,且两个工型滑道5平行对称设置,每个工型滑道5上设有一个齿条9,齿条9与工型滑道5滑动连接,两个齿条9的有齿面相对设置,一个齿条9的一端设有一个挡板4,另一个齿条9的一端设有另一个挡板4,且两个挡板4相对于清洗框的轴线对称设置,抓取盖板1的顶板上表面中央处设有电机支架6,电机支架6上设有电机7,电机7的输出轴穿过抓取盖板1的顶板之后,与齿轮8固定连接,且齿轮8设置在两个齿条9之间,齿轮8同时与两个齿条9啮合;
23.本具体实施方式,在使用时,将抓取盖板1放置在清洗框11的上表面,此时启动电源,当两个挡板4上的压力传感器未有压力信号输出时,控制器2将驱动信号传递到电机7上,此时电机7驱动,电机7的输出端带动齿轮8转动,且齿轮8的两侧分别与一个齿条9啮合,是两个齿条9在工型滑道5做相对滑动,从而实现利用两个挡板4对清洗筐11进行夹紧,从而实现对清洗筐11进行纵向的定心作业,当挡板4上的压力传感器与清洗筐11侧壁接触时,此时挡板4上的压力传感器将压力信号传递到控制器2中,控制器2将停止信号传递到电机7上,电机7停车;
24.当固定板15上的压力传感器未有压力信号输出时,控制器2将气缸驱动信号传递到气缸14,此时两个气缸14同时启动,使气缸14输出端上的固定板15与清洗筐11的外壁接触,此时完成对清洗筐的横向定心作业,当固定板15上的压力传感器将压力信号传递到控制器2,控制器2将气缸复位信号传递到气缸14,此时气缸14复位;
25.当支撑杆12上的压力传感器未有压力信号输出时,控制器2将驱动信号传递到凸轮13的驱动装置,此时凸轮13转动,凸轮13转动使支撑杆12的高度升高,使支撑杆12的外表面与把手10的横梁接触,从而使支撑杆12穿过把手10,此时当支撑杆12上的压力传感器将压力信号传递到控制器2中,此时使控制器2将停止信号传递到凸轮13的驱动装置,两个凸轮13停止转动,使两个凸轮13上的支撑杆12均穿过把手10,此时启动气缸12,使气缸12的输出端伸出,利用固定板15对把手进行一个限位的作用,此时利用抓取盖板1上表面的四角处的吊耳3与吊车的吊钩固定,使清洗筐移动至有机溶剂清洗池中。
26.具体实施方式二:结合图1说明本实施方式,本实施方式是对具体实施方式一所述的自动抓取装置的进一步的限定,本实施方式所述的一种有机溶剂清洗机专用清洗筐的自
动抓取装置,所述的固定板15和两个挡板4的端面分别设有一个压力传感器;
27.本具体实施方式,利用控制器对驱动装置和气缸进行自动控制,电机的输出端带动齿轮转动,且齿轮的两侧分别与一个齿条啮合,是两个齿条在工型滑道做相对滑动,从而实现利用两个挡板对清洗筐进行夹紧,从而实现对清洗筐进行纵向的定心作业;控制器将气缸驱动信号传递到气缸,此时两个气缸同时启动,使气缸输出端上的固定板与清洗筐的外壁接触,此时完成对清洗筐的横向定心作业;从而实现对清洗筐的自动定心作业;在移动清洗筐时,避免清洗筐失去平衡,防止零件从筐中滑落出来。
28.具体实施方式三:结合图1说明本实施方式,本实施方式是对具体实施方式一所述的自动抓取装置的进一步的限定,本实施方式所述的一种有机溶剂清洗机专用清洗筐的自动抓取装置,所述的支撑杆12的外表面设有一个压力传感器,且压力传感器的触控端面向抓取盖板1的底面设置;
29.本具体实施方式,采用支撑杆12的外表面设有一个压力传感器,且压力传感器的触控端面向抓取盖板1的底面设置,当支撑杆12上的压力传感器未有压力信号输出时,控制器2将驱动信号传递到凸轮13的驱动装置,此时凸轮13转动,凸轮13转动使支撑杆12的高度升高,使支撑杆12的外表面与把手10的横梁接触,从而使支撑杆12穿过把手10,此时当支撑杆12上的压力传感器将压力信号传递到控制器2中,此时使控制器2将停止信号传递到凸轮13的驱动装置,两个凸轮13停止转动,使两个凸轮13上的支撑杆12均穿过把手10,此时启动气缸12,使气缸12的输出端伸出,利用固定板15对把手进行一个限位的作用。
30.具体实施方式四:结合图1说明本实施方式,本实施方式是对具体实施方式一所述的自动抓取装置的进一步的限定,本实施方式所述的一种有机溶剂清洗机专用清洗筐的自动抓取装置,所述的抓取盖板1的顶板上表面的一侧设有一个方形凹槽,且凹槽的内部嵌设有一个控制器2;
31.本具体实施方式,采用抓取盖板1的顶板上表面的一侧设有一个方形凹槽,且凹槽的内部嵌设有一个控制器2,实现对该装置的自动控制。
32.具体实施方式五:结合图1说明本实施方式,本实施方式是对具体实施方式一所述的自动抓取装置的进一步的限定,本实施方式所述的一种有机溶剂清洗机专用清洗筐的自动抓取装置,所述的凸轮13的驱动装置为驱动电机。
33.具体实施方式六:结合图1说明本实施方式,本实施方式是对具体实施方式一、二、三或四所述的自动抓取装置的进一步的限定,本实施方式所述的一种有机溶剂清洗机专用清洗筐的自动抓取装置,所述的固定板15上的压力传感器的压力信号输出端与控制器2的一号压力输出端连接,控制器2的气缸驱动信号输出端与气缸14连接,支撑杆12上的压力传感器的压力信号输出端与控制器2的二号压力输出端连接,控制器2的一号驱动信号输出端与凸轮13的驱动装置连接,挡板4上的压力传感器的压力信号输出端与控制器2的三号压力输出端连接,控制器2的二号驱动信号输出端与电机7连接。
34.具体实施方式七:结合图1说明本实施方式,本实施方式是对具体实施方式一所述的自动抓取装置的进一步的限定,本实施方式所述的一种有机溶剂清洗机专用清洗筐的自动抓取装置,所述的抓取盖板1上表面的四角处分别设有一个吊耳3;
35.本具体实施方式,采用抓取盖板1上表面的四角处分别设有一个吊耳3,便于将吊车上的吊钩与自动抓取装置进行固定。
36.工作原理
37.在使用时,将抓取盖板1放置在清洗框11的上表面,此时启动电源,当两个挡板4上的压力传感器未有压力信号输出时,控制器2将驱动信号传递到电机7上,此时电机7驱动,电机7的输出端带动齿轮8转动,且齿轮8的两侧分别与一个齿条9啮合,是两个齿条9在工型滑道5做相对滑动,从而实现利用两个挡板4对清洗筐11进行夹紧,从而实现对清洗筐11进行纵向的定心作业,当挡板4上的压力传感器与清洗筐11侧壁接触时,此时挡板4上的压力传感器将压力信号传递到控制器2中,控制器2将停止信号传递到电机7上,电机7停车;
38.当固定板15上的压力传感器未有压力信号输出时,控制器2将气缸驱动信号传递到气缸14,此时两个气缸14同时启动,使气缸14输出端上的固定板15与清洗筐11的外壁接触,此时完成对清洗筐的横向定心作业,当固定板15上的压力传感器将压力信号传递到控制器2,控制器2将气缸复位信号传递到气缸14,此时气缸14复位;
39.当支撑杆12上的压力传感器未有压力信号输出时,控制器2将驱动信号传递到凸轮13的驱动装置,此时凸轮13转动,凸轮13转动使支撑杆12的高度升高,使支撑杆12的外表面与把手10的横梁接触,从而使支撑杆12穿过把手10,此时当支撑杆12上的压力传感器将压力信号传递到控制器2中,此时使控制器2将停止信号传递到凸轮13的驱动装置,两个凸轮13停止转动,使两个凸轮13上的支撑杆12均穿过把手10,此时启动气缸12,使气缸12的输出端伸出,利用固定板15对把手进行一个限位的作用,此时利用抓取盖板1上表面的四角处的吊耳3与吊车的吊钩固定,使清洗筐移动至有机溶剂清洗池中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。