1.本实用新型的实施例涉及一种定子骨架组件和一种包括这样的定子骨架组件的步进电机。
背景技术:
2.爪极式步进电机广泛应用于智能家居领域。爪极式步进电机可以包括机壳以及安装在机壳内部的定子组件、转子组件和齿轮组件。定子组件包括定子骨架组件、具有多个第一对应极爪的第一对应极板和具有多个第二对应极爪的第二对应极板。定子骨架组件包括第一骨架部分、具有与多个第一对应极爪配合的多个第一极爪的第一极板、具有与多个第二对应极爪配合的多个第二极爪的第二极板以及第二骨架部分。
3.随着大家生活品质的提高,智能家居领域等对产品的市场不良率要求很高,目前的爪极式步进电机的不良率已经控制在10ppm左右,但是仍不能满足特殊客户更苛刻的要求,他们甚至追求零不良。目前,爪极式步进电机中最易发生的不良之一是极爪摩擦铁芯问题。
技术实现要素:
4.发明人发现,极爪摩擦铁芯的问题主要来源于:在步进电机的定子骨架组件的装配过程中,先将第一极板和第二极板叠合形成中间极板组件,再将该组件放置于第一骨架部分、第二骨架部分之间,第一骨架部分、第二骨架部分在其径向外围分别设置多个安装凸起和安装孔,通过安装孔和安装凸起来实现第一骨架部分、第二骨架部分和中间极板组件三者的连接固定以形成骨架组件。这种连接固定结构存在这样的问题:随着电机的长期运行,安装孔与安装凸起之间的连接松动,造成第一极板和第二极板晃动,影响电机稳定性;第一极板和第二极板的极爪变形,与转子腔中的转子发生干涉,导致极爪擦伤转子外表面,造成转子运转异常。
5.本公开的目的至少在于解决上述问题。
6.为此,本公开的至少一实施例提供一种定子骨架组件,包括第一极板、第二极板和骨架。第一极板包括环形的第一板状本体和与第一板状本体成一体的多个第一极爪,多个第一极爪从第一板状本体弯折并且在轴向方向上延伸。第二极板包括环形的第二板状本体和与第二板状本体成一体的多个第二极爪,多个第二极爪从第二板状本体弯折并且在轴向方向上延伸。骨架包括第一骨架部分和第二骨架部分。第一骨架部分包括靠近第一极板的第一近端壁、远离第一极板的第一远端壁和筒形的第一侧壁,第一近端壁和第一远端壁分别从第一侧壁的两端径向向外延伸,使得在第一近端壁和第一远端壁之间形成第一绕线空间。第二骨架部分包括靠近第二极板的第二近端壁、远离第二极板的第二远端壁和筒形的第二侧壁,第二近端壁和第二远端壁分别从第二侧壁的两端径向向外延伸,使得在第二近端壁和第二远端壁之间形成第二绕线空间。第一近端壁、第一板状本体、第二板状本体和第二近端壁依次堆叠以形成转子腔,并且多个第一极爪延伸到第一侧壁的内侧并且多个第二
极爪延伸到第二侧壁的内侧。骨架还包括中间骨架部分,其连接在第一骨架部分和第二骨架部分之间。中间骨架部分包括环形的楔状主体,所述楔状主体包括多个第一楔形表面和多个第二楔形表面,所述第一楔形表面在轴向方向上朝向所述第一骨架部分渐缩并且抵接所述第一极爪的弯折部,所述第二楔形表面在轴向方向上朝向所述第二骨架部分渐缩并且抵接所述第二极爪的弯折部。
7.包括第一楔形表面和第二楔形表面的中间骨架部分由于其楔状结构能够帮助承受由于极爪的弯折部处的应力释放造成的变形力,并向极爪施加使其保持其形状和位置的作用力,避免了电机长时间运转后极爪的变形。
8.例如,在一些实施例中,中间骨架部分还包括:第一连接部,其连接在相邻的两个第一楔形表面之间并且抵接到第一侧壁;和第二连接部,其连接在相邻的两个第二楔形表面之间并且抵接到第二侧壁。
9.例如,在一些实施例中,中间骨架部分在轴向方向上的高度大于或等于 1mm。
10.例如,在一些实施例中,第一骨架部分的内壁面设置有用于接收第一极爪的、在周向方向上间隔布置的第一凹槽和用于接收第一对应极爪的、在周向方向上与第一凹槽交错布置的第三凹槽,并且第二骨架部分的内壁面设置有用于接收第二极爪的、在周向方向上间隔布置的第二凹槽和用于接收第二对应极爪的、在周向方向上与第一凹槽交错布置的第四凹槽。
11.例如,在一些实施例中,第一凹槽大体包括靠近第一板状本体的长方形部段和远离第一板状本体的等腰梯形部段。第二凹槽大体包括靠近第二板状本体的长方形部段和远离第二板状本体的等腰梯形部段。
12.例如,在一些实施例中,第三凹槽大体为等腰梯形,第三凹槽在轴向方向上的高度在3.4
‑
4.9mm的范围内,第三凹槽的靠近远端侧的长圆弧边的长度在2.4
‑
2.8mm的范围内,第三凹槽的靠近近端侧的短圆弧边的长度在1.2
‑ꢀ
1.6mm的范围内。
13.例如,在一些实施例中,第一骨架部分的内壁面的直径在10.4
‑
12.8mm 的范围内,第二骨架部分的内壁面的直径在10.4
‑
12.8mm的范围内。
14.例如,在一些实施例中,第一骨架部分、第二骨架部分和中间骨架部分通过以下方式中的一个固定在一起:一体注塑成型、粘结和超声波焊接。
15.例如,在一些实施例中,骨架还包括至少一个附加连接体,其设置在中间骨架部分的径向外侧并且连接在第一骨架部分和第二骨架部分之间。第一板状本体具有第一定位孔,第二板状本体具有第二定位孔,并且附加连接体穿过第一定位孔以及第二定位孔并与第一定位孔以及第二定位孔配合。
16.例如,在一些实施例中,第一极爪和第二极爪在周向方向上彼此交错角度α,第一极爪和第二极爪数量等于n,且满足α*n=90
°
。
17.例如,在一些实施例中,定位凸台设置在第一骨架部分的第一远端壁上并且朝向远端突出,用于与第一对应极板配合。
18.例如,在一些实施例中,第一板状本体在边缘处设置有圆弧形的第一定位槽,第二板状本体在边缘处设置有第二定位槽,第一近端壁在边缘处设置有第一近端让位槽,第一远端壁在边缘处设置有第一远端让位槽,第二近端壁在边缘处设置有第二近端让位槽,第二远端壁在边缘处设置有第二远端让位槽。第一定位槽和第二定位槽的半径和第一近端让
位槽、第一远端让位槽、第二近端让位槽和第二远端让位槽的半径的差值在0.3
‑
1mm的范围内。
19.本公开的至少一实施例提供一种步进电机,包括第一对应极板、第二对应极板、转子组件和如上所述的定子骨架组件。第一对应极板包括与多个第一极爪配合的多个第一对应极爪。第二对应极板包括与多个第二极爪配合的多个第二对应极爪。转子组件设置于转子腔。
20.本公开的至少一实施例提供一种步进电机,包括如上所述的定子骨架组件。第一对应极爪的自由端与第三凹槽的近端面在轴向方向上的距离以及第二对应极爪的自由端与第四凹槽的近端面在轴向方向上的距离在0
‑
1.5mm 的范围内。
21.本公开的至少一实施例提供一种定子骨架组件的制造方法,用于制造如上所述的定子骨架组件,包括如下步骤:将第一极板和第二极板层叠放置在一起;以及通过一体注塑成型形成包括第一骨架部分、第二骨架部分和中间骨架部分的骨架,其中,第一骨架部分、第二骨架部分和中间骨架部分通过一体注塑被包覆模制到第一极板和第二极板。
22.本公开的至少一实施例提供一种定子骨架组件的制造方法,用于制造如上所述的定子骨架组件,包括如下步骤:将第二骨架部分和第二极板层叠放置;至少在中间骨架部分的表面处涂抹胶水,并且将中间骨架部分放置在第二骨架部分和第二极板的适当位置处;将第一骨架部分和第一极板层叠放置在第二极板上;保持中间骨架部分、第一骨架部分、第二骨架部分、第一极板和第二极板以使其粘结固定在一起。
23.本公开的至少一实施例提供一种定子骨架组件的制造方法,用于制造如上所述的定子骨架组件,包括如下步骤:将第二骨架部分、第二极板、中间骨架部分依次层叠放置,将第一极板和第一骨架部分依次层叠放置在第二骨架部分和第二极板的适当位置处;通过在中间骨架部分与第一骨架部分、第二骨架部分的连接处进行超声波焊接,使得中间骨架部分、第一骨架部分、第二骨架部分、第一极板和第二极板固定在一起。
附图说明
24.为了更清楚地说明本公开实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本公开的某些实施例,因此不应被看作是对保护范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
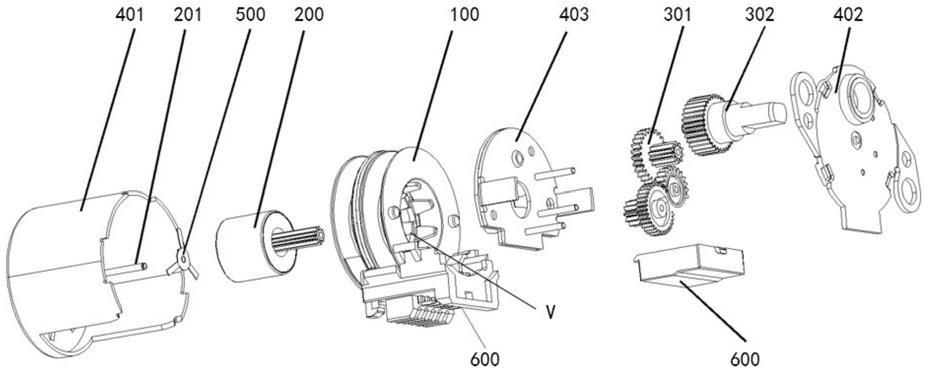
25.图1示出了根据本公开的实施例的步进电机的分解立体图;
26.图2示出了根据本公开的实施例的定子骨架组件的立体图;
27.图3a示出了根据本公开的实施例的定子骨架组件的分解立体图;
28.图3b示出了本公开的实施例的包括定子骨架组件的定子组件装入机壳后的剖视图;
29.图4
‑
图6分别示出了根据本公开实施例的定子骨架组件的俯视图、仰视图和侧视图;
30.图7示出了根据本公开实施例的第一极板和第二极板的分解立体图;
31.图8示出了根据本公开实施例的第一极板和第二极板的剖视立体图;
32.图9示出了根据本公开实施例的第一骨架部分的立体图;
33.图10示出了根据本公开实施例的第二骨架部分的立体图;
34.图11示出了根据本公开的实施例的定子骨架组件沿图4中的n
‑
n线被剖切的剖视立体图;
35.图12示出了根据本公开的实施例的定子骨架组件沿图4中的m
‑
m线被剖切的剖视图;
36.图13示出了根据本公开的实施例的中间骨架部分的立体图;
37.图14a示出了根据本公开的实施例的定子骨架组件沿图4中的s
‑
s线被剖切的剖视图;
38.图14b示出了图14a在虚线框处的放大视图;
39.图15a示出了根据本公开的实施例的定子骨架组件沿图4中的t
‑
t线被剖切的剖视图;
40.图15b示出了图15a在虚线框处的放大视图;
41.图16a示出了根据本公开的实施例的定子骨架组件沿图4中的r
‑
r线被剖切的剖视图;
42.图16b示出了图16a在虚线框处的放大视图;
43.图17a示出了根据本公开的实施例的定子骨架组件沿图4中的u
‑
u线被剖切的剖视图;
44.图17b示出了图17a在虚线框处的放大视图;
45.图18示出了根据本公开实施例的定子骨架组件的骨架的内壁面的平铺展开图;
46.图19示出了根据本公开的实施例的定子骨架组件沿图6中的p
‑
p线被剖切的剖视图;
47.图20示出了根据本公开的实施例的定子骨架组件沿图6中的q
‑
q线被剖切的剖视图。
48.附图标记列表
49.定子骨架组件100
50.第一骨架部分110
51.第一远端壁111
52.第一近端壁112
53.第一侧壁113
54.第一凹槽1131
55.的第三凹槽1132
56.第一凸台1133
57.端子台114
58.定位凸台115
59.第一远端让位槽116
60.第一近端让位槽117
61.第二骨架部分120
62.第二远端壁121
63.第二近端壁122
64.第二侧壁123
65.第二凹槽1231
66.第四凹槽1232
67.第二凸台1233
68.第二远端让位槽126
69.第二近端让位槽127
70.第一极板130
71.第一板状本体131
72.第一极爪132
73.第一定位孔133
74.第一定位槽134
75.第二极板140
76.第二板状本体141
77.第二极爪142
78.第二定位孔143
79.第二定位槽144
80.中间骨架部分150
81.楔状主体151
82.第一楔形表面1511
83.第二楔形表面1512
84.第一连接部152
85.第二连接部153
86.附加连接体160
87.转子组件200
88.中轴201
89.输出齿轮组301
90.输出轴组件302
91.主体壳体401
92.第二对应极爪4011
93.盖板402
94.第一对应极板403
95.第一对应极爪4031
96.弹簧片500
97.出线盒600
具体实施方式
98.为使本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。基于所描述的本公开的实施例,本领域普通技术
人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本公开保护的范围。
99.除非另外定义,本公开使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排出其他元件或者物件。“上”、“下”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
100.根据本公开的至少一实施例提供一种定子骨架组件,包括:第一极板,其包括环形的第一板状本体和与第一板状本体成一体的多个第一极爪,多个第一极爪从第一板状本体弯折并且在轴向方向上延伸;第二极板,其包括环形的第二板状本体和与第二板状本体成一体的多个第二极爪,多个第二极爪从第二板状本体弯折并且在轴向方向上延伸,以及骨架。该骨架包括第一骨架部分和第二骨架部分。第一骨架部分包括靠近第一极板的第一近端壁、远离第一极板的第一远端壁和筒形的第一侧壁,第一近端壁和第一远端壁分别从第一侧壁的两端径向向外延伸,使得在第一近端壁和第一远端壁之间形成第一绕线空间。第二骨架部分包括靠近第二极板的第二近端壁、远离第二极板的第二远端壁和筒形的第二侧壁,第二近端壁和第二远端壁分别从第二侧壁的两端径向向外延伸,使得在第二近端壁和第二远端壁之间形成第二绕线空间。第一近端壁、第一板状本体、第二板状本体和第二近端壁依次堆叠以形成转子腔,并且多个第一极爪延伸到第一侧壁的内侧并且多个第二极爪延伸到第二侧壁的内侧。骨架还包括连接在第一骨架部分和第二骨架部分之间的中间骨架部分。中间骨架部分包括环形的楔状主体,所述楔状主体包括多个第一楔形表面和多个第二楔形表面,所述第一楔形表面在轴向方向上朝向所述第一骨架部分渐缩并且抵接所述第一极爪的弯折部,所述第二楔形表面在轴向方向上朝向所述第二骨架部分渐缩并且抵接所述第二极爪的弯折部。
101.第一极板和第二极板的极爪例如通过冲压工艺一体折弯形成。在第一极板极和第二极板的极爪的弯折部(即,根部)存在应力。由于电机在长时间运转后温度升高,应力在极爪的弯折部处释放,极爪会有朝转子腔方向折返的趋势。根据本公开的实施例的定子骨架组件的中间骨架部分包括抵接第一极爪的弯折部的第一楔形表面和抵接第二极爪的弯折部的第二楔形表面,包括第一楔形表面和第二楔形表面的中间骨架部分由于其楔状结构能够帮助承受由于极爪的弯折部处的应力释放造成的变形力,并向极爪施加使其保持其形状和位置的作用力,避免了电机长时间运转后极爪的变形。此外,中间骨架部分连接第一骨架部分和第二骨架部分,有助于提高骨架的整体刚性,保证了骨架的内壁(包括第一侧壁、第二侧壁)的内径的一致和稳定。由于避免了极爪向转子腔方向变形以及保证了骨架的内壁孔径的稳定,因此,提高了电机定子组件与转子的气隙,减少了电机磁阻、励磁损耗,提高了电机输出力矩的能力。
102.图1示出了根据本公开的实施例的步进电机的分解立体图。如图1所示,该步进电机为爪极式步进电机,其包括机壳以及安装在机壳内部的定子组件、转子组件200、齿轮组件。此外,步进电机还可以包括中轴201、弹簧片500和出线盒600。机壳包括主体壳体401和盖板402。定子组件包括定子骨架组件100、包括多个第一对应极爪4031的第一对应极板403、包括多个第二对应极爪4011的第二对应极板。这里,第二对应极板可以与主体壳体401
成一体。齿轮组件包括输出齿轮组301和输出轴组件302。定子骨架组件100具有转子腔v。转子组件200安装于中轴201,其穿过转子腔v并且通过输出齿轮组301将扭矩传递到输出轴组件302。
103.图2示出了根据本公开的实施例的定子骨架组件100的立体图,图3a 分别示出了根据本公开的实施例的定子骨架组件100的分解立体图,图3b 示出了本公开的实施例的包括定子骨架组件100的定子组件装入机壳后的剖视图,图4
‑
图6分别示出了根据本公开实施例的定子骨架组件100的俯视图、仰视图和侧视图。如图2
‑
图6所示,定子骨架组件100包括第一极板 130、第二极板140和骨架。骨架包括第一骨架部分110、第二骨架部分120、中间骨架部分150和附加连接体160。为了方便和清楚地描述根据本公开的定子骨架组件100,定义轴线l所在的轴向方向z、垂直于轴向方向z的第一径向方向x和垂直于轴向方向z和第一径向方向x的第二径向方向y,与定子组件配合的转子组件200围绕轴线l旋转。
104.图7示出了根据本公开实施例的第一极板130和第二极板140的分解立体图,图8示出了根据本公开实施例的第一极板130和第二极板140的立体剖视图,其中,第一极板130和第二极板140叠放在一起。如图7和图8所示,第一极板130包括环形的第一板状本体131和与第一板状本体131成一体的多个第一极爪132。该多个第一极爪132从第一板状本体131弯折以在轴向方向延伸。类似地,第二极板140包括环形的第二板状本体141和与第二板状本体141成一体的多个第二极爪142。该多个第二极爪142从第二板状本体141弯折以在轴向方向延伸。例如,第一极爪132和第二极爪142可以分别通过冲压工艺弯折极板预成型件而形成,极板预成型件可以通过冲裁工艺而形成。
105.如图8所示,第一极板130的第一板状本体131和第二极板140的第二板状本体141叠放在一起,以在第一板状本体131和第二板状本体141之间形成中间平面a。多个第一极爪132围绕轴线l间隔布置,多个第二极爪 142围绕轴线l间隔布置,并且第一极爪132和第二极爪142布置成在周向方向上彼此交错。为了方便和清楚地描述根据本公开的定子骨架组件100,将朝向中间平面a的方向定义为近端方向,将远离中间平面a的方向定义为远端方向。多个第一极爪132和多个第二极爪142分别从第一板状本体 131和第二板状本体141朝向远端方向延伸。
106.图9示出了根据本公开实施例的第一骨架部分110的立体图。如图9所示,第一骨架部分110包括靠近中间平面a的第一近端壁112、远离中间平面a的第一远端壁111和连接第一近端壁112和第一远端壁111的第一侧壁113。第一侧壁113呈筒形,第一近端壁112和第一远端壁111分别在第一侧壁113的近端侧和远端侧从第一侧壁113径向向外延伸,以在第一近端壁112和第一远端壁111之间形成第一绕线空间。线圈可以在第一绕线空间中围绕第一侧壁113缠绕。此外,第一骨架部分110还可以包括端子台114 和定位凸台115。端子台114用于支撑电连接到线圈的端子引脚,端子台114 具有引脚孔,端子引脚插入到该引脚孔中。定位凸台115与第一对应极板403 的第一对应定位孔配合以将第一骨架部分110相对于第一对应极板403在周向方向上定位。定位凸台115例如为2个或多于2个。定位凸台115有助于防止在装配后第一对应极板403相对于定子骨架组件100发生周向位移。
107.图10示出了根据本公开实施例的第二骨架部分120的立体图。如图10 所示,第二骨架部分120包括靠近中间平面a的第二近端壁122、远离中间平面a的第二远端壁121和连接第二近端壁122和第二远端壁121的第二侧壁123。第二侧壁123呈筒形,第二近端壁122和
第二远端壁121分别在第二侧壁123的近端侧和远端侧从第二侧壁123径向向外延伸,以在第二近端壁122和第二远端壁121之间形成第二绕线空间。另一线圈可以在第二绕线空间中围绕第二侧壁123缠绕。
108.如图2所示,第一近端壁112、第一板状本体131、第二板状本体141和第二近端壁122依次堆叠以形成转子腔v,使得多个第一极爪132延伸到第一侧壁113的内侧并且多个第二极爪142延伸到第二侧壁123的内侧。具体地,多个第一极爪132可以抵靠第一侧壁113的内壁面,多个第二极爪142 可以抵靠第二侧壁123的内壁面。
109.由于第一极爪132和第二极爪142通过弯折形成,在第一极爪132和第二极爪142的弯折部处存在应力。由于电机在长时间运转后温度升高,应力在极爪的弯折部处释放(参见图8中的应力释放点o),第一极爪132和第二极爪142会有朝转子腔v方向折返的趋势。
110.图11示出了根据本公开的实施例的定子骨架组件100沿图4中的n
‑
n 线被剖切的剖视立体图,图12示出了根据本公开的实施例的定子骨架组件 100沿图4中的m
‑
m线被剖切的剖视图,其中未示出第一极板130和第二极板140,图13示出了根据本公开的实施例的中间骨架部分150的立体图,图14a示出了根据本公开的实施例的定子骨架组件100沿图4中的s
‑
s线被剖切的剖视图,图15a示出了根据本公开的实施例的定子骨架组件100沿图4中的t
‑
t线被剖切的剖视图,图16a示出了根据本公开的实施例的定子骨架组件100沿图4中的线r
‑
r被剖切的剖视图,图17a示出了根据本公开的实施例的定子骨架组件100沿图4中的u
‑
u线被剖切的剖视图。图 14b
‑
图17b分别示出了图14a
‑
图17a在虚线框处的放大图。如图11
‑
17b所示,定子骨架组件100的中间骨架部分150包括环形的楔状主体151,其包括配置为在轴向方向上朝向第一骨架部分110渐缩并且抵接第一极爪132的弯折部的第一楔形表面1511和配置为在轴向方向上朝向第二骨架部分120 渐缩并且抵接第二极爪142的第二楔形表面1512。由于中间骨架部分150的该楔状结构,中间骨架部分150可以承受由于极爪132、142的弯折部处的应力释放造成的变形力,并向极爪132、142施加使其保持其形状和位置的作用力(例如,参见图14b中的力f),避免了电机长时间运转后极爪132、 142的变形。此外,中间骨架部分150连接第一骨架部分110和第二骨架部分120,有助于提高骨架的整体刚性,保证了骨架的内壁(包括第一侧壁113、第二侧壁123)的内径的一致和稳定。
111.此外,中间骨架部分150还包括第一连接部152和第二连接部153。第一连接部152连接在相邻的两个第一楔形表面1511之间并且抵接到第一骨架部分110的第一侧壁113,第二连接部153连接在相邻的两个第二楔形表面1512之间并且抵接到第二骨架部分120的第二侧壁123。第一连接部152、第二连接部153和环形主体151一体成型。第一连接部152和第二连接部 153增强了第一楔形表面1511和第二楔形表面1512的形状稳定性,有助于使得第一楔形表面1511和第二楔形表面1512更好地抵抗极爪132、142的弯折部的变形力。此外,第一连接部152和第二连接部153还提高了骨架的整体刚性。中间骨架部分150在轴向方向上的高度d23大于或等于1mm,这有助于使得第一楔形表面1511和第二楔形表面1512能够完全地包裹弯折部并且具有足够的强度。另外,该尺寸的设定方便了在生产过程中对中间骨架部分150进行质量监测。
112.如图14a和图14b所示,定子骨架组件100在中间骨架部分150的第一楔形表面1511和第二楔形表面1512处被剖切,也就是说在第一极爪132 和第二极爪142处被剖切。如图15a和图15b所示,定子骨架组件100在中间骨架部分150的第一楔形表面1511和第二连接部
153处被剖切,也就是说在第一极爪132处而在没有第二极爪142处被剖切。如图16a和图16b 所示,定子骨架组件100在中间骨架部分150的第一连接部152和第二连接部153处被剖切,也就是说在没有第一极爪132和没有第二极爪142处被剖切。如图17a和图17b所示,定子骨架组件100在中间骨架部分150的第一连接部152和第二楔形表面1512处被剖切,也就是说在没有第一极爪132 处而在第二极爪142处被剖切。
113.图18示出了根据本公开实施例的定子骨架组件的骨架的内壁面的平铺展开图,图19示出了根据本公开的实施例的定子骨架组件沿图6中的p
‑
p 线被剖切的剖视图,图20示出了根据本公开的实施例的定子骨架组件沿图 6中的q
‑
q线被剖切的剖视图。如图9
‑
图12和图18
‑
图20所示,第一骨架部分110还可以包括用于接收第一极爪132的、在周向方向上间隔布置的第一凹槽1131,并且第二骨架部分120还可以包括用于接收第二极爪142的、在周向方向上间隔布置的第二凹槽1231。第一凹槽1131和第二凹槽1231的设置分别有助于更好地保持第一极爪132和第二极爪142的形状和位置。
114.此外,第一骨架部分110还可以包括用于接收第一对应极爪4031的、在周向方向上与第一凹槽1131交错布置的第三凹槽1132,并且第二骨架部分120还可以包括用于接收第二对应极爪4011的、在周向方向上与第二凹槽1231交错布置的第四凹槽1232。第三凹槽1132和第四凹槽1232的设置分别有助于更好地保持第一对应极爪4031和第二对应极爪4011的形状和位置。
115.第一凹槽1131和第三凹槽1132交错地形成在第一骨架部分110的内壁面中。在本示例中,相邻的两个第三凹槽1132之间形成有第一凸台1133,而第一凹槽1131至少部分地形成在第一凸台1133中。第一凸台1133的内壁面为第一骨架部分110的内壁面。第一极爪132和第一对应极爪4031大致为等腰梯形形状。第三凹槽1132可以形成为具有长圆弧边和短圆弧边的等腰梯形。第一凹槽1131可以形成为包括在近端侧的长方形部段和在第一凸台1133中的在远端侧的等腰梯形部段。第一极爪132通常包括长方形部段和等腰梯形部段,并且在长方形部段处弯折。第一凹槽1311形成为包括长方形部段和等腰梯形部段,使得第一凹槽1311可以容纳第一极爪132的长方形部段和等腰梯形部段的连接处。在第一楔形表面1511抵接第一极爪 132的弯折部的情况下,这使得第一楔形表面1511所抵接的弯折部不存在诸如长方形部段与等腰梯形部段的连接处的不连续面,从而避免了第一楔形表面1511的应力集中,更好的保证了第一楔形表面1511的强度和形状稳定性。
116.第三凹槽1132在轴向方向z上的高度h2(参见图12)可以在3.4
‑
4.9mm 的范围内,第三凹槽1132的靠近远端侧的长圆弧边的长度d8(参见图4) 在2.4
‑
2.8mm的范围内,第三凹槽1132的靠近近端侧的短圆弧边的长度d7 (参见图4)在1.2
‑
1.6mm的范围内,第三凹槽1132的径向深度d9(参见图19)在0.6
‑
1.05mm的范围内。
117.第一凸台1133在轴向方向z上的高度h3(参见图12)在3.4
‑
4.9mm的范围内,第一凸台1133的靠近远端侧的短圆弧边的长度d10(参见图4)在 1.2
‑
1.6mm的范围内,第一凸台1133的靠近近端侧的长圆弧边的长度d11 (参见图4)在2.4
‑
2.8mm的范围内,第一凸台1133的径向厚度d12(参见图19)在0.6
‑
1.05mm的范围内。
118.第一凹槽1131的等腰梯形部段在轴向方向上的高度h4(参见图12)小于高度h3,第一凹槽1131的径向深度d13(参见图19)在0.6mm
‑
d12的范围内。第一极爪132从第一凹槽1131的近端插入到第一凹槽1131中,使得第一极爪132的外壁面抵靠第一凹槽1131的内侧
表面。
119.第一凸台1133的内壁面(即,第一骨架部分110的内壁面)的内径(直径)r1在10.4
‑
12.8mm的范围内,第三凹槽1132的底侧壁面的内径(直径) r2在11.4
‑
14.1mm的范围内。
120.第一凹槽1131和第三凹槽1132在周向方向上均匀分布在第一骨架部分 110的内壁面中。第一凹槽1131和第三凹槽1132的数量相等,例如可以为5
‑
12个。
121.如图18所示,第二凹槽1231和第四凹槽1232交错地形成在第二骨架部分120的内壁面中。也就是说,相邻的两个第四凹槽1232之间形成有第二凸台1233,而第二凹槽1231至少部分地形成在第二凸台1233中。第一凸台1133的内壁面为第二骨架部分120的内壁面。第二凹槽1231、第四凹槽 1232和第二凸台1233分别与第一凹槽1131、第三凹槽1132和第一凸台1133 分别具有相同的尺寸、数量和形状。
122.具体地,第四凹槽1232在轴向方向z上的高度h5可以在3.4
‑
4.9mm的范围内,第四凹槽1232的靠近远端侧的长圆弧边的长度d15(参见图5)在 2.4
‑
2.8mm的范围内,第四凹槽1232的靠近近端侧的短圆弧边的长度d14 (参见图5)在1.2
‑
1.6mm的范围内,第四凹槽1232的径向深度d16(参见图20)在0.6
‑
1.05mm的范围内。
123.第二凸台1233在轴向方向z上的高度h6在3.4
‑
4.9mm的范围内,第二凸台1233的靠近远端侧的短圆弧边的长度d17(参见图5)在1.2
‑
1.6mm 的范围内,第二凸台1233的靠近近端侧的长圆弧边的长度d18(参见图5) 在2.4
‑
2.8mm的范围内,第二凸台1233的径向厚度d19(参见图20)在0.6
‑ꢀ
1.05mm的范围内。
124.第二凹槽1231的等腰梯形部段在轴向方向上的高度h9小于高度h6,第二凹槽1231的径向深度d20(参见图20)在0.6mm
‑
d16的范围内。
125.第二凸台1233的内壁面(即,第二骨架部分120的内壁面)的内径(直径)r3在10.4
‑
12.8mm的范围内,第三凹槽1132的底侧壁面的内径(直径) r4在11.4
‑
14.1mm的范围内。
126.第一极爪132被容纳在第一凹槽1131中,并且可以与第一凹槽1131的底侧壁面贴合。第一对应极爪4031被容纳在第三凹槽132中,并且与第三凹槽132的底侧壁面贴合。第二极爪142被容纳在第二凹槽1231中,并且与第二凹槽1231的底侧壁面贴合。第二对应极爪4011被容纳在第四凹槽 1232中,并且与第四凹槽1232的底侧壁面贴合。第一骨架部分110的内壁面的内径(直径)r1与转子组件200的外径为间隙配合。图3b示出了第一对应极爪4031和第二对应极爪4011装配到定子骨架组件100上的情况。例如,第一对应极爪4031的自由端部与第三凹槽1132的近端面在轴向方向上的距离h7以及第二对应极爪4011的自由端与第四凹槽1232的近端面在轴向方向上的距离h8在0
‑
1.5mm的范围内。这样的间隙配合有助于放置各个部件在装配后产生干涉,导致电机卡死等故障。
127.第一极爪132和第二极爪142在周向方向上彼此交错角度α(例如,逆时针地)。第一骨架部分110和第二骨架部分120被装配成使得第一凹槽 1131和第二凹槽1231在周向方向上交错角度α。在第一凹槽1131和第三凹槽1132在周向方向上均匀分布在第一骨架部分110的内壁面中,第二凹槽1231和第四凹槽1232在周向方向上均匀分布在第二骨架部分120的内壁面中,并且第二凹槽1231、第四凹槽1232和第二凸台1233分别与第一凹槽 1131、第三凹槽1132和第一凸台1133分别具有相同的尺寸、数量和形状的情况下,第三凹槽1132和第四凹槽1232在周向方向上交错角度α,并且将第一骨架部分110在周向方向上旋转角度α后,在周向方向上,第一凹槽 1131与第二凹槽1231的位置重叠,第三凹槽1132与第四凹槽1232
的位置重叠。例如,第一极爪132、第二极爪142、第一凹槽1131、第二凹槽1231、第三凹槽1132和第四凹槽1232的数量等于n,则α*n=90
°
,这有助于减少电机运行过程中的转矩脉动。
128.返回图14a和14b,定子骨架组件100在第一骨架部分110的第一凸台1133和第一凹槽1131处以及第二骨架部分120的第二凸台1233和第二凹槽1231处被剖切,中间骨架部分150的环形主体151、第一凸台1133、位于第一凹槽1131中的第一极爪132、第二凸台1233、位于第二凹槽1231中的第二极爪142的内壁面基本平齐。返回图15a和15b,定子骨架组件100 在第一骨架部分110的第一凸台1133和第一凹槽1131处以及第二骨架部分 120的第四凹槽1232处被剖切,中间骨架部分150的环形主体151、第一凸台1133、位于第一凹槽1131中的第一极爪132的内壁面基本平齐。返回图 16a和16b,定子骨架组件100在第一骨架部分110的第三凹槽1132处以及第二骨架部分120的第四凹槽1232处被剖切。返回图17a和17b,定子骨架组件100在第一骨架部分110的第三凹槽1132处以及第二骨架部分120 的第二凸台1233和第二凹槽1231处被剖切,中间骨架部分150的环形主体 151、第二凸台1233、位于第二凹槽1231中的第二极爪142的内壁面基本平齐。
129.返回图7和图8,第一极爪132还包括至少一个第一定位孔133(图中为多个),第二极爪142还包括至少一个第二定位孔143(图中为多个)。附加连接体160设置在中间骨架部分150的径向外侧并且连接在第一骨架部分110和第二骨架部分120之间。附加连接体160穿过第一定位孔133以及第二定位孔143并与第一定位孔133以及第二定位孔143配合以将骨架相对于第一极板130和第二极板140在轴向方向上定位。具体地,第一定位孔 133和第二定位孔143可以为圆形通孔,附加连接体160可以为圆柱体,附加连接体160穿过第一定位孔133和第二定位孔143,附加连接体160的外侧壁与第一定位孔133和第二定位孔143的内侧壁抵接,附加连接体160的两端面分别连接到第一骨架部分110的第一近端壁112的近端端面和第二骨架部分120的第二近端壁122的近端端面。
130.如图2、图4、图5和图7所示,第一极板130的第一板状本体131设置有第一定位槽134,第二极板140的第二板状本体141设置有第二定位槽 144,第一骨架部分110的第一近端壁112和第一远端壁111分别设置有第一近端让位槽117和第一远端让位槽116,并且第二骨架部分120的第二近端壁122和第二远端壁121分别设置有第二近端让位槽127和第二远端让位槽126。第一定位槽134和第二定位槽144用于在制造定子骨架组件100时与定位针配合定位第一极板130和第二极板140,第一近端让位槽117、第一远端让位槽116、第二近端让位槽127和第二远端让位槽126用于供定位针通过以在轴线方向上抵靠第一板状本体131和第二板状本体141。例如,第一定位槽134和第二定位槽144均为2个,2个第一定位槽134和2个第二定位槽144设置在周向方向上相差180
°
并且在半径相同的位置处。第一定位槽134和第二定位槽144的半径r6小于第一近端让位槽117、第一远端让位槽116、第二近端让位槽127和第二远端让位槽126的半径r5,其差值d22=r5
‑
r6在0.3
‑
1mm的范围内。定位槽134、144可以设置在极板本体 131、141的边缘,为圆弧形状,让位槽117、116、127、126可以设置在近端壁117、127或远端壁116、126的边缘,为圆弧形状。定位槽134、144和让位槽117、116、127、126的尺寸影响定位针与第一板状本体131和第二板状本体141的被定位针按压的面积范围,影响第一极板130和第二极板 140的定位稳定进而影响模具使用寿命。
131.根据本公开的至少一实施例还提供一种定子骨架组件100的制造方法,定子骨架
组件100例如如上所述的定子骨架组件100。定子骨架组件100可以通过胶水粘接的方式制造。在这种情况下,定子骨架组件100的制造方法包括:
132.s11,将第一骨架部分110、第二骨架部分120、中间骨架部分150、附加连接体160、第一极板130和第二极板140放置在烘箱中烘干;
133.s12,将第二骨架部分120和第二极板140层叠放置在一起,
134.s13,至少在中间骨架部分150、附加连接体160的连接面处涂抹诸如 ab胶的胶水,并且将中间骨架部分150、附加连接体160放置在第二骨架部分120和第二极板140的适当位置处;
135.s14,将第一骨架部分110和第一极板130层叠放置在第二极板140上。
136.s15,加压保持,使得中间骨架部分150、附加连接体160、第一骨架部分110、第二骨架部分120、第一极板130和第二极板140通过胶水粘结固定在一起。
137.在这过程中,可以使用专用工装定位和保持各个部件,工装例如包括如上所述的定位针。
138.定子骨架组件100还可以通过超声波焊接的方式制造。在这种情况下,定子骨架组件100的制造方法包括:
139.s21,将第二骨架部分120、第二极板140、中间骨架部分150依次层叠放置在一起,
140.s22,将附加连接体160、第一极板130和第一骨架部分110依次放置在第二骨架部分120和第二极板140的适当位置处;
141.s24,通过超声波焊接,使得中间骨架部分150、附加连接体160、第一骨架部分110、第二骨架部分120、第一极板130和第二极板140固定在一起。
142.在这过程中,可以使用专用工装定位和保持各个部件,工装例如包括如上所述的定位针。
143.定子骨架组件100还可以通过注塑成型的方式制造,即第一骨架部分 110、第二骨架部分120、中间骨架部分150和附加连接体160一体注塑成型。在这种情况下,定子骨架组件100的制造方法包括:
144.s31,将第一极板130和第二极板140层叠放置在一起;
145.s32,注塑料烘料;
146.s33,通过一体注塑成型形成包括第一骨架部分110、第二骨架部分120、中间骨架部分150和附加连接体160的骨架,其中,第一骨架部分110、第二骨架部分120和中间骨架部分150通过一体注塑被包覆模制到第一极板 130和第二极板140。
147.在步骤s33中,可以使用具有至少两个方向的抽芯的哈夫模具。此外,步骤s33还可以包括将第一极板130和第二极板140在模具中定位,注射压力调节、模具合模压力调节、模具保压和开模等。
148.在步骤s33中,可以使用如上所述的定位针与定位槽和让位槽配合,定位槽使得在高速射胶时第一极板130和第二极板140不会发生变形和位移,保证了骨架的质量,提高了产品的合格率。
149.具有至少两个方向的抽芯的哈夫模具可实现转子腔v和引脚孔的成型,提高了成型效率,并且提高了转子腔v和端子孔之间相对的位置精度。注塑料烘料和第一极板130和第二极板140的组装可以分两条生产线同时进行,提高了工作效率。
150.需要说明的是,在本公开中描述的方法中,在可行的情况下,各个步骤可以以其他顺序或并行地进行。
151.根据本公开的至少一实施例还提供一种步进电机,其包括如上所述的定子骨架组件100、第一对应极板403、第二对应极板和设置在转子腔中的转子组件。第一对应极板403包括与多个第一极爪132配合的多个第一对应极爪4031。第二对应极板包括与多个第二极爪142配合的多个第二对应极爪 4011。第二对应极板可以与主机壳体401成一体。
152.本公开的范围并非由上述描述的实施方式来限定,而是由所附的权利要求书及其等同范围来限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

