1.本发明涉及一种园林工具,具体涉及一种智能割草系统。
背景技术:
2.通常,割草机等户外园艺类切割工具上都设置有用于推行的操作把手,操作把手上靠近握持部位设置有方便操作者操作控制的开关盒及控制机构。割草机依靠操作者施加于操作把手的推力于地面行进并进行切割操作,操作者操作这种推行式割草机的劳动强度非常大。随着人工智能的不断发展,能够自行走的智能割草机也得到了发展。由于智能割草机可以自动行走,执行预先设置的相关任务,无需人为的操作与干预,极大的节省了人力物力,为操作者带来方便。
3.智能割草机的出现给用户带来了极大的便利,让用户可以从繁重的园艺护理劳动中解脱出来。但是,智能割草机通常在边界线内移动,边界线和信号发射单元连接,信号发射单元产生边界信号发送给边界线,智能割草机识别边界信号以控制智能割草机在边界线内移动。但在实际使用过程中,在相邻的两个区域上可能同时存在第一边界线和第二边界线,此情况下第一边界线内的智能割草机既可以检测到第一边界线的第一边界信号,又可以检测到第二边界信号,两种边界信号互相干扰,造成智能割草机无法识别本区域的边界信号而出现混乱,从而无法高精度地识别工作区域。
技术实现要素:
4.为解决现有技术的不足,本发明的目的在于提供一种智能割草系统能识别边界信号是否为本智能割草系统的预设工作信号,防止干扰信号对系统的干扰,提高预设工作信号的识别以及抗干扰能力。
5.为了实现上述目标,本发明采用如下的技术方案:一种智能割草系统,包括:信号发射单元,能发射多种预设工作信号;边界线缆,与所述信号发射单元连接,所述预设工作信号流经所述边界线缆时产生磁场信号;智能割草机,包括:信号接收模块,被配置为接收所述智能割草机周围环境中存在的磁场信号并将所述磁场信号转换为边界线感应信号;控制模块,用于:接收来自所述信号接收模块的边界线感应信号和来自所述信号发射单元的预设工作信号;获取与所述预设工作信号相关的第一参量;周期性获取与所述边界线感应信号相关的第二参量;若所述第一参量与所述第二参量相匹配时, 则依据当前周期的所述边界线感应信号输出第一控制信号以控制所述智能割草机的行走。
6.可选地,智能割草系统还包括选择装置,用于供用户选择以使所述信号发射单元周期性发射多种所述预设工作信号中的一种。
7.选择装置可选地,若所述第一参量与所述第二参量不匹配时,则依据所述第一参量与所述第二参量相匹配时的上一周期的所述边界线感应信号输出第二控制信号以控制所述智能割草机的行走。
8.可选地,所述信号发射单元发射的预设工作信号包括发射信号段和辅助信号段。
9.可选地,所述信号发射单元在一个周期内,先发射发射信号段,经第一预设时长后发射辅助信号段;所述信号发射单元在发射一个周期的辅助信号段后,经第二预设时长后发射第二个周期的发射信号段。
10.可选地,所述选择装置为交互界面,所述交互界面设有按键供用户选择以使所述信号发射单元发射多种所述预设工作信号中的一种。
11.可选地,所述发射信号段的信号和所述辅助信号段的信号为正弦波信号。
12.可选地,所述发射信号段发射具有第一相位的第一信号,所述辅助信号段发射具有第二相位的第二信号;所述第一相位和所述第二相位不同。
13.可选地,所述发射信号段的信号和所述辅助信号段的信号相同;所述第一预设时长和所述第二预设时长相同。
14.可选地,所述发射信号段的信号和所述辅助信号段的信号相同;所述第一预设时长和所述第二预设时长不同。
15.可选地,所述第一预设时长为零。
16.可选地,获取与所述预设工作信号相关的第一参量,所述第一参量为所述预设工作信号的发射信号段的过零点的个数、所述预设工作信号的第二预设时长和所述预设工作信号的周期;周期性获取与所述边界线感应信号相关的第二参量,所述第二参量为所述边界线感应信号的周期、所述边界线感应信号的第二预设时长和所述边界线感应信号的发射信号段的过零点的个数;若所述预设工作信号的周期和所述边界线感应信号的周期相同、所述预设工作信号的第二预设时长和所述边界线感应信号的周期相同且所述预设工作信号的发射信号段的过零点的个数和所述边界线感应信号的发射信号段的过零点的个数相同时,则依据当前周期的所述边界线感应信号输出第一控制信号以控制所述智能割草机的行走。
17.可选地,获取与所述预设工作信号相关的第一参量,所述第一参量为所述预设工作信号的发射信号段的时长、所述预设工作信号的第一预设时长和所述预设工作信号的辅助信号段的时长;周期性获取与所述边界线感应信号相关的第二参量,所述第二参量为所述边界线感应信号的发射信号段的时长、所述边界线感应信号的第一预设时长和所述边界线感应信号的辅助信号段的时长;若所述预设工作信号的发射信号段的时长与所述边界线感应信号的发射信号段的时长相同,所述预设工作信号的第一预设时长和所述边界线感应信号的第一预设时长相同且所述预设工作信号的辅助信号段的时长与所述边界线感应信号的辅助信号段的时长相同时,则依据当前周期的所述边界线感应信号输出第一控制信号以控制所述智能割草机的行走。
18.可选地,获取与所述预设工作信号相关的第一参量,所述第一参量为所述预设工作信号的发射信号段的时长、所述预设工作信号的第一预设时长、所述预设工作信号的第二预设时长和所述预设工作信号的辅助信号段的时长;周期性获取与所述边界线感应信号相关的第二参量,所述第二参量为所述边界线感应信号的发射信号段的时长、所述边界线感应信号的第一预设时长、所述边界线感应信号的第二预设信号时长和所述边界线感应信号的辅助信号段的时长;
若所述预设工作信号的发射信号段的时长与所述边界线感应信号的发射信号段的时长相同,所述预设工作信号的第一预设时长与所述边界线感应信号的第一预设时长相同,所述预设工作信号的第二预设时长与所述边界线感应信号的第二预设时长相同且所述预设工作信号的辅助信号段的时长与所述边界线感应信号的辅助信号段的时长相同时,则依据当前周期的所述边界线感应信号输出第一控制信号以控制所述智能割草机的行走。
19.本发明的有益之处在于提供了一种智能割草系统能识别所接收的边界信号是否为本智能割草系统的边界信号,防止干扰信号对系统的干扰,提高了智能割草系统的边界信号的识别以及抗干扰能力。
附图说明
20.图1是一种智能割草系统的示意图;图2是图1所示的智能割草系统中的智能割草机的结构示意图;图3是图2所示智能割草机的电路模块图;图4是图1所示智能割草系统相邻情况下的说明图;图5是图3所示智能割草系统的电路模块图;图6是预设工作信号的波形图;图7a是第一实施方式的第一预设工作信号的波形图;图7b是第一实施方式的第二预设工作信号的波形图;图8a是第二实施方式的第一预设工作信号的波形图;图8b是第二实施方式的第二预设工作信号的波形图;图9是第三实施方式的预设工作信号的波形图和边界线感应信号的波形图;图10是智能割草机识别预设工作信号是否为本智能割草系统的预设工作信号的方法流程图。
具体实施方式
21.以下结合附图和具体实施例对本发明作具体的介绍。
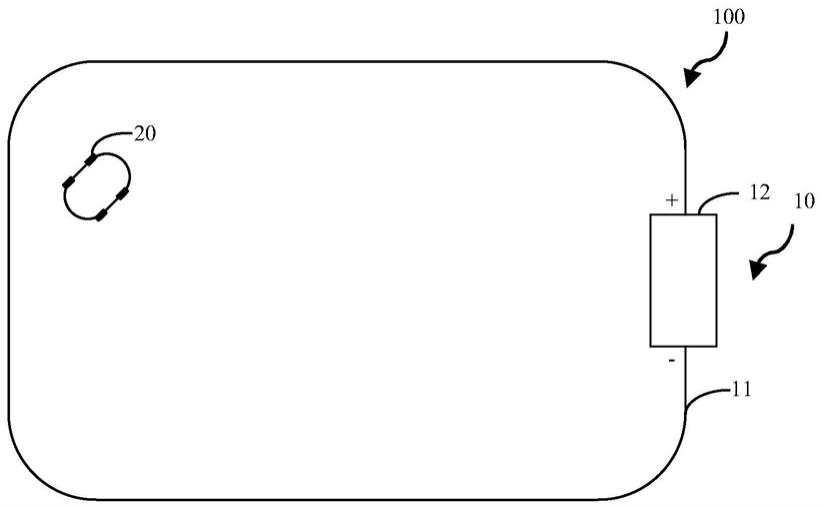
22.图1所示的智能割草系统100包括边界模块10和智能割草机20。边界模块10包括边界线缆11和信号发射单元12。边界线缆11用于规划出智能割草机20的工作区域,其中位于边界线缆11内的区域为工作区域和位于边界线缆11外的区域为非工作区域,边界线缆11可以设置在地面。信号发射单元12能够发射预设工作信号,信号发射单元12与边界线缆11电性连接,信号发射单元12能发射预设工作信号给边界线缆11,边界线缆11用于接收发射单元发射的预设工作信号。预设工作信号流经边界线缆11时产生磁场信号,可以理解,预设工作信号可以为电流信号。在一些实施例中,信号发射单元12周期性地给边界线缆11提供交变的电流信号,电流信号流经边界线缆11时产生交变磁场信号。具体地,信号发射单元12可以是充电桩,充电桩能够周期性地给边界线缆11提供交变的电流信号,充电桩还可以为智能割草机20充电。
23.参考图2和图3所示,智能割草机20至少包括主体21,割草组件22和行走组件23。
24.割草组件22通常安装于主体21下方,用于切割草或植被,具体可以为用于实现割草功能的割草元件(未示出),还包括用于驱动割草元件的高速旋转的切割马达221以及用
于控制所述切割马达的切割驱动控制器222。割草组件22可以包括一个以上的割草元件,对应的,切割马达221的数目可以与割草元件相对应。
25.行走组件23,由所述主体21支撑并可转动,用于使得智能割草机20能够在草坪上行走。行走组件23包括行走轮,在一些实施例中,所述行走轮包括第一行走轮231和第二行走轮232,上述割草元件位于所述第一行走轮231和所述第二行走轮232之间。行走组件23还包括行走马达233,所述行走马达用于驱动所述行走轮,行走马达的数目也为2,分别为驱动第一行走轮的第一行走马达2331和驱动第二行走轮的第二行走马达2332。行走组件23还包括用于控制所述行走马达233的行走驱动控制器235,行走驱动控制器235包括:第一行走驱动控制器2351和第二行走驱动控制器2352。具体地,第一行走驱动控制器2351用于驱动对应的第一行走马达2331;第二行走驱动控制器235用于控制对应的第二行走马达2332。这样,当两个行走马达以不同的转速驱动对应行走轮转动时,第一行走轮和第二行走轮之间产生速度差,从而使得智能割草机20进行转向。
26.智能割草机20还包括电源模组25,其为智能割草机20提供电能,可选的,电源模组25被实施为至少一电池包,且通过智能割草机20上的电池包界面接入智能割草机20,以给切割马达221和行走马达233提供电能。供电电路,其电连接电源模组25及电机,使得从电源设备输出的电能提供给电机,以驱动割草组件22和行走组件23。值得一提的是,所述智能割草机20可选择全自动割草模式,也可增加手动割草模式,即用户手动控制所述智能割草机20进行作业。
27.智能割草机20还设有与用户交互的交互界面28,交互界面28可显示智能割草机20的运行状态信息,并设有按键或开关供用户控制智能割草机20的启动和运行。在一些实施例中,交互界面28与控制模块27连接,用户通过按键或开关传输控制指令时,由控制模块27获取分析并输出响应的控制指令到对应的控制器,以控制智能割草机20的运行。交互界面28与控制模块27可通信地连接,交互界面28还可以设置在手机等移动终端上,这样用户可以通过手机等移动终端监测和操控智能割草机20,这样,方便了用户的使用。
28.智能割草机20进一步包括信号接收模块26和控制模块27。其中,信号接收模块26用于接收智能割草机20周围环境中存在的磁场信号,并将磁场信号转换为边界线感应信号。具体地,信号接收模块26能够将磁场转换为相应的电信号,在一些实施例中,信号接收模块26包括电感,电感感应磁场,并产生相应的电动势,从而将磁场信号转换为边界线感应信号传递给控制模块27。在另一些实施例中,信号接收模块26包括磁场检测传感器,磁场检测传感器可以检测交变磁场并转变成电信号输出。
29.控制模块27设置为接收所述边界线感应信号,并根据边界线感应信号来判断智能割草机20是否在边界线缆11内的工作区域,同时根据边界线感应信号来控制所述智能割草机20在工作区域内行走。在一些具体的实施例中,控制模块27包括控制芯片,例如mcu、arm等。
30.参考图4所示,在实际使用过程中,在相邻的两个区域上,存在同时使用智能割草系统100的可能性,即在相邻的两个区域上分别存在第一智能割草系统110和第二智能割草系统120。在此情况下,当第一智能割草系统110的第一智能割草机111行走至第一边界线缆112与第二边界线缆122靠近的位置时,第一智能割草机111既能检测到第一边界线缆112的第一预设工作信号,又可以检测到第二边界线缆122的第二预设工作信号。因为第一智能割
草机的第一控制模块需要根据来自第一预设工作信号的第一边界线感应信号才能判断第一智能割草机111处于第一边界线缆111内还是外,因此第一控制模块需要识别智能割草机111所接受到的磁场信号是来自第一边界线缆112还是第二边界线缆122,这样,第一控制模块才能准确控制第一智能割草机111在第一工作区域内行走。同样地,第二智能割草机121在运行过程中,第二智能割草机121的第二控制模块检测到边界线感应信号时需要区分智能割草机121所接收到的磁场信号是来自第一边界线缆112还是第二边界线缆122,第二控制模块根据来自第二预设工作信号的第二边界线感应信号才能准确控制第二智能割草机121在第二工作区域内行走。
31.为了解决上述问题,信号发射单元12被设置为能够发射多种预设工作信号以使相邻区域上的两个智能割草系统100的发射单元能够发射不同的预设工作信号,这样,智能割草机20能够区分出所在智能割草系统100产生的预设工作信号。
32.因此,信号发射单元12还包括信号存储模块,所述信号存储模块用于存储多种预设工作信号。此外,智能割草系统100还包括选择装置,用于使所述信号发射单元12周期性发射多种预设工作信号的一种。其中,信号存储模块根据来自选择装置的控制信号,控制信号发射单元12发射多种预设工作信号的一种。
33.这样,将相邻区域上的两个智能割草系统100的信号发射单元12设置为发射不同的预设工作信号以便智能割草机20能够区分出所在智能割草系统100产生的预设工作信号。
34.作为一种实施方式,选择装置设置在信号发射单元12上。在一些实施方式中,该选择装置根据用户的选择使多种预设工作信号的一种从信号发射单元12输出。例如,智能割草机20在回归到信号发射单元12充电时,用户通过信号发射单元12上的选择装置选择一种预设工作信号,同时信号发射单元12通过充电端口发送选择指令至智能割草机20的控制模块27,所述选择指令反映了用户选择的预设工作信号相关的第一参量。可以理解的是,选择指令还可以设置为脉冲电流信号,此脉冲电流信号反映了用户选择的预设工作信号相关的第一参量。即预设工作信号包括选择指令信号段,当智能割草系统100开始运行后,信号发射单元12开始发射预设工作信号,智能割草机20离开信号发射单元12开始接收磁场信号。预设工作信号通过边界线缆11转换为磁场信号传递给智能割草机20的信号接收模块26,信号接收模块26将磁场信号转换为边界线感应信号传递给控制模块27,以使控制模块27接收到与预设工作信号相关的第一参量。在另一些实施方式中,选择装置随机选择多种预设工作信号的任意一种从信号发射单元12输出,或者在第一智能割草机111无法识别出所接受到的磁场信号是来自第一边界线缆112还是第二边界线缆122时,选择装置能够接收智能割草机111的控制信号,使信号发射单元113更新预设工作信号,以对当前的预设工作信号进行更换。其中,信号发射单元113与第一智能割草机111可通信地连接,这样的连接可以以任何适当的方式来实现,包括但不限于有线或无线连接。
35.作为另一种实施方式,所述选择装置设置在智能割草机20上。具体地,所述选择装置为交互界面28,交互界面28还设有按键供用户在多种预设工作信号中选择一种预设工作信号,信号发射单元12能够根据用户的选择发射预设工作信号至边界线缆11。具体而言,用户通过按键传输选择指令,控制模块27获取选择指令,所述选择指令反映了用户选择的预设工作信号相关的第一参量,控制模块27进一步输出响应的控制指令到信号发射单元12,
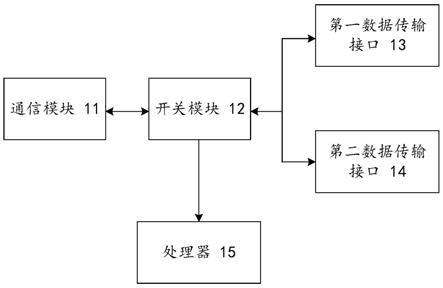
信号发射单元12根据选择指令输出用户选定的预设工作信号。其中,信号发射单元12与控制模块27可通信地连接,这样的连接可以以任何适当的方式来实现,包括但不限于有线或无线连接。具体而言,控制模块用于接收来自信号接收模块的边界线感应信号和来自信号发射单元的预设工作信号;获取与预设工作信号相关的第一参量;周期性获取与边界线感应信号相关的第二参量;当第一参量与第二参量匹配时,则依据当前周期的边界线感应信号输出第一控制信号以控制所述智能割草机的行走。参考图5所示,控制模块27进一步包括信号处理器271、比较器272、微控制器273。信号处理器271与信号接收模块26电性连接,用于接收所述边界线感应信号,对所述边界线感应信号进行处理,生成处理信号。比较器272与信号处理器271电性连接,用于周期性获取与边界线感应信号相关的第二参量。同时,比较器272还通过选择指令获取了与所述预设工作信号相关的第一参量,并对第一参量和第二参量进行比较。当比较器272输出的比较结果相匹配时,微控制器273确认信号接收模块26接收的磁场信号为预设工作信号流经边界线缆11时所产生的磁场信号,则依据当前周期的处理信号来控制智能割草机20的行走;当比较装置输出的比较结果为不匹配时,将处理信号丢弃,不对其作任何处理,则微控制器273将依据第一参量和第二参量相匹配时的上一周期的边界线感应信号输出第二控制信号以控制所述智能割草机20的行走。
36.信号发射单元12被设置为能够周期性发射多种预设工作信号。参考图6所示,预设工作信号包括发射信号段es和辅助信号段as。信号发射单元12在一个周期t1内,先发射发射信号段es,经第一预设时长t1后发射辅助信号段as;信号发射单元12在发射一个周期的辅助信号段as后,经第二预设时长t2后发射第二个周期的发射信号段es。
37.为了使用户能够将相邻区域上的两个智能割草系统110和智能割草系统120的信号发射单元113和信号发射单元123设置为发射不同的预设工作信号,则所述信号发射单元113和信号发射单元123被配置为至少能够发射两种预设工作信号。在具体的实施例中,在两个智能割草系统110和智能割草系统120同时工作时,所述信号发射单元113被配置为发射一种预设工作信号,则所述信号发射单元123被配置为发射另一预设工作信号。
38.作为一种实施方式,预设工作信号中的发射信号段es和辅助信号段as同为正弦波信号,发射信号段es和辅助信号段as发射的信号的幅值、频率、相位相同,且预设工作信号的第一预设时长t1和第二预设时长t2相同,则多种预设工作信号可以通过发射信号段es时长和辅助信号段as时长区分,相应的,上述与预设工作信号相关的第一参量包括:预设工作信号的发射信号段的时长、第一预设时长和辅助信号段的时长,上述与边界线感应信号相关的第二参量包括:边界线感应信号的发射信号段的时长、第一预设时长和辅助信号段的时长。图7示出能够从信号发射单元113输出的多种预设工作信号的说明图。以多种预设工作信号具体包括两种预设工作信号为例进行说明,两种预设工作信号分别为第一预设工作信号bs110(图7a所示)和第二预设工作信号bs120(图7b所示)。第一预设工作信号bs110的一个周期t110包括时长为t111的发射信号段es110,时长为t112的辅助信号段as110以及第一预设时长t113和第二预设时长t113。第二预设工作信号bs120的一个周期t120包括时长为t121的发射信号段es120,时长为t122的辅助信号段as120以及第一预设时长t123和第二预设时长t123。其中,第一预设工作信号的发射信号段时长t111和第二预设工作信号的发射信号段时长t121相同,第一预设工作信号的第一预设时长t113和第二预设工作信号的第二预设时长t123相同。另外,第一预设工作信号的辅助信号段时长t112和第二预设工作信
号的辅助信号段的时长t122不同,因此,第一预设工作信号和第二预设工作信号不同。
39.这样,在一些实施方式中,智能割草机111启动后,用户通过交互界面28选择第一预设工作信号bs110后,交互界面28发送控制指令至控制模块27,控制模块27接收并分析控制指令,将第一预设工作信号的相关的第一参量发送至比较器272,同时发送响应的控制指令至信号发射单元12使信号发射单元113发射第一工作信号至边界线缆11。信号接收模块26接收智能割草机20周围环境中存在的磁场信号并将所述磁场信号转换为边界感应信号,信号处理器271用于接收所述边界线感应信号,对所述边界线感应信号进行处理,生成处理信号。比较器272用于获取与预设工作信号相关的第一参量并周期性获取与边界线感应信号相关的第二参量,并对第一参量和第二参量进行比较。
40.具体的,比较器272将所述边界线感应信号的发射信号段的时长与所述第一预设工作信号的发射信号段的时长t111进行比较,边界线感应信号的辅助信号段的时长与所述第一预设工作信号的辅助信号段的时长t112进行比较以及所述边界线感应信号的第一预设时长和所述第一预设工作信号的第一预设时长t113进行比较。当比较器272输出的比较结果相匹配,即上述时长比较结果均相同时,微控制器273确认信号接收模块26接收的磁场信号为第一预设工作信号bs110流经边界线缆112时所产生的磁场信号,则依据当前周期的处理信号来控制智能割草机111的行走;当比较装置输出的比较结果为不匹配,即上述时长比较结果至少有一个不同时,将处理信号丢弃,不对其作任何处理,则微控制器273将所述第一参量与所述第二参量相匹配时的上一周期的边界线感应信号输出第二控制信号以控制所述智能割草机111的行走,并继续等待下一个边界线感应信号的出现。
41.这样,通过设置预设工作信号并将边界线感应信号与预设工作信号的相关物理参量进行比较,使得智能割草机111能识别出哪些信号是预设工作信号,哪些信号不是预设工作信号,从而将不是本智能割草系统110发射的预设工作信号的干扰信号排除,防止干扰信号对系统的干扰,提高系统的信号识别以及抗干扰能力。
42.图8示出了另一种实施方式的从信号发射单元113输出的多种预设工作信号的说明图。以多种预设工作信号具体包括两种预设工作信号为例进行说明,两种预设工作信号分别为第一预设工作信号bs110(图8a所示)和第二预设工作信号bs120(图8b所示)。其中,与图7所示实施例不同是,预设工作信号的第一预设时长t1和第二预设时长t2不同,则预设工作信号相关的第一参量包括:预设工作信号的发射信号段es的时长、第一预设时长、第二预设时长和辅助信号段as的时长,则上述与边界线感应信号相关的第二参量包括: 边界线感应信号的发射信号段es的时长、第一预设时长、第二预设时长和辅助信号段as的时长。参考图8所示,第一预设工作信号bs110的发射信号段es110的时长t111和第二预设工作信号bs120的发射信号段es120的时长t121相同,第一预设工作信号bs110的辅助信号段as110的时长t122和第二预设工作信号bs120的辅助信号段as120的时长t122也相同。另外,第一预设工作信号bs110的第一预设时长t113和第二预设工作信号的第一时长t123不同,第一预设工作信号的第二预设时长t114和第二预设工作信号的第二时长t124不同。
43.这样,智能割草机111启动后,用户通过交互界面28选择第一预设工作信号bs110后,交互界面28发送控制指令至控制模块27,控制模块27接收并分析控制指令,将第一预设工作信号的相关的第一参量发送至比较器272,同时发送响应的控制指令至信号发射单元113使信号发射单元113发射所述预设工作信号至边界线缆112。信号接收模块26接收智能
割草机111周围环境中存在的磁场信号并将所述磁场信号转换为边界感应信号,信号处理器271用于接收所述边界线感应信号,对所述边界线感应信号进行处理,生成处理信号。比较器272用于获取与第一预设工作信号相关的第一参量并周期性获取与边界线感应信号相关的第二参量,并对第一参量和第二参量进行比较。
44.具体的,比较器272将所述边界线感应信号的发射信号段es的时长与所述第一预设工作信号bs110的发射信号段es110的时长t111进行比较,边界线感应信号的辅助信号段as的时长与所述预设第一工作信号bs110的辅助信号段as110的时长t112进行比较,所述边界线感应信号的第一预设时长t1和所述第一预设工作信号bs110的第一预设时长t113进行比较以及所述边界线感应信号的第二预设时长和所述第一预设工作信号bs110的第二预设时长t114进行比较。当比较器272输出的比较结果相匹配,即上述时长比较结果均相同时,微控制器273确认信号接收模块26接收的磁场信号为预设工作信号流经边界线缆112时所产生的磁场信号,则依据当前周期的处理信号来控制智能能割草机111的行走;当比较装置输出的比较结果为不匹配,即上述时长比较结果至少有一个不同时,将处理信号丢弃,不对其作任何处理,则微控制器273将所述第一参量与所述第二参量相匹配时的上一周期的边界线感应信号输出第二控制信号以控制所述智能割草机20的行走,并继续等待下一个边界线感应信号的出现。
45.作为另一种实施方式,预设工作信号中的发射信号段es和辅助信号段as的信号不同,信号的不同具体表现为信号的频率、相位或幅值中的至少一个不同。相应的,上述与预设工作信号相关的第一参量包括:预设工作信号的发射信号段es过零点的个数和预设工作信号的周期;则与上述边界线感应信号相关的第二参量包括:边界线感应信号的发射信号段es过零点的个数和边界线感应信号的周期。
46.参考图9所示的第一预设工作信号bs110,信号发射单元113在一个周期t110内,先发射发射信号段es110,经第一预设时长t1后发射辅助信号段as110,信号发射单元113在发射一个周期的辅助信号段as后,经第二预设时长t2后发射第二个周期的发射信号段es110。接下来,以发射信号段es110和辅助信号段as110是相位不同的信号为例进行说明。发射信号段es110发射具有第一相位的第一信号,辅助信号段as110发射具有第二相位的第二信号,第一相位和第二相位不同;第一预设时长t1为零,则预设工作信号的一个周期t110内包括第一信号、第二信号和第二预设时长t2。
47.这样,智能割草机111启动后,用户通过交互界面28选择上述预设工作信号后,交互界面28发送控制指令至控制模块27,控制模块27接收并分析控制指令,将预设工作信号的相关的第一参量发送至比较器272,同时发送响应的控制指令至信号发射单元12使信号发射单元12发射上述预设工作信号至边界线缆11。预设工作信号经边界线缆112后在边界线缆112内外生成具有相反方向的磁场信号。图9所示的边界线感应信号ms110示出了智能割草机111在边界线缆112以内的边界线感应信号。信号处理器271接收边界线感应信号ms110,进一步对边界线感应信号ms110进行处理并将处理信号传递给比较器272,比较器272用于获取预设工作信号bs110相关的第一参量并周期性获取与边界线感应信号ms110相关的第二参量,并对第一参量和第二参量进行比较。
48.具体的,比较器272将所述边界线感应信号ms110的发射信号段的过零点的次数与所述预设工作信号bs1的发射信号段es110的过零点的个数进行比较,示例性地,将边界线
感应信号的一个周期m110与所述预设工作信号的一个周期t110进行比较。当比较器272输出的比较结果相匹配,即上述比较结果均相同时,微控制器273确认信号接收模块26接收的磁场信号为预设工作信号bs110流经边界线缆112时所产生的磁场信号,则依据当前周期的处理信号来控制智能割草机111的行走;当比较器272输出的比较结果为不匹配,即上述时长比较结果至少有一个不同时,将处理信号丢弃,不对其作任何处理,则微控制器273将依据上一周期第一参量与第二参量相匹配时的所述处理信号控制所述智能割草机111的行走并继续等待下一个边界线感应信号的出现。
49.这样,通过设置预设工作信号并将边界线感应信号与预设工作信号的相关物理参量进行比较,使得智能割草机111能识别出哪些信号是预设工作信号,哪些信号不是预设工作信号,从而将不是本智能割草系统110发射的预设工作信号的干扰信号排除,防止干扰信号对系统的干扰,提高系统的信号识别以及抗干扰能力。
50.以上为预设工作信号为正弦波信号的实施方式,可以理解的是,预设工作信号还可以为方波信号、三角波信号或锯齿波信号等信号形式中的一种,在此不做限制。
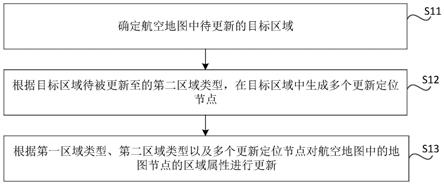
51.参考图10,应用于智能割草系统100的边界信号识别方法,包括如下步骤:s1:初始化。对控制模块27进行初始化。
52.s2:发射预设工作信号。
53.信号发射单元12被设置为能够发射多种预设工作信号。在一些实施方式中,用户通过选择装置选择以使所述信号发射单元12周期性发射多种所述预设工作信号中的一种。在另一些实施方式中,选择装置随机选择多种预设工作信号的任意一种从信号发射单元12输出,或者,信号发射单元113能够接收智能割草机111的控制信号,更新预设工作信号,以对当前的预设工作信号进行更换。
54.s3:接收磁场信号。
55.信号接收模块26用于感应智能割草机20周围环境中存在的磁场信号,并生成边界线感应信号。
56.s4:判断边界线感应信号相关的第二参量与预设工作信号相关的第一参量是否匹配。
57.控制模块27设置为接收所述边界线感应信号。具体的,信号处理器271接收边界线感应信号,进一步对边界线感应信号进行处理并将处理信号传递给比较器272,比较器272用于将边界线感应信号相关的第二参量和与所述预设工作信号相关的第一参量进行比较,并将比较结果输出给微控制器273。当比较器272输出的比较结果相匹配时,则执行s5;当比较器272输出的比较结果不匹配时,则返回s3。
58.s5:控制智能割草机行走。
59.控制模块27将按照当前的边界线感应信号判断智能割草机20是否在边界线缆11内。具体的,微控制器273确认检测到的边界信号为设置的预设工作信号,即环境中的边界信号为信号发射单元12发送的预设工作信号,则微控制器273将按照当前的边界信号判断智能割草机20在边界线缆11内还是外并控制智能割草机20在预定区域内行走。
60.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,上述实施例不以任何形式限制本发明,凡采用等同替换或等效变换的方式所获得的技术方案,均落在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。