1.本发明涉及高级驾驶辅助技术领域,特别涉及车路协同技术领域,具体为一种十字路口场景下的车路协同装置及方法。
背景技术:
2.车路协同技术的诞生得益于无人驾驶技术的发展,随着近些年通信技术和传感器技术的发展,车路协同技术也发展到了新高度,特别是5g技术的发展,实现了车和路之间信息的实时互通,从而使车辆在行驶时可以及时获取道路上的信息,以实现更安全、更高效的决策。
3.但是在车路协同应用过程中,由于一些道路环境的复杂性而难以实现,这些复杂的道路环境中最常见的一个就是十字路口。现有的车路协同技术大多采用摄像头等传感器与云服务器结合的方案,然而十字路口常常包含车辆、行人、信号灯、人行道等多种人为因素和客观环境因素,使得车路协同实现时存在信息难检测、安全难肯定、决策难执行等问题。
技术实现要素:
4.针对现有技术的不足,本发明提出了一种十字路口场景下的车路协同装置及方法,针对十字路口这种复杂的道路环境,提供一种智能解决方案。
5.一种十字路口场景下的车路协同装置,包括信息采集模块、路边柜模块、云端服务器和车载端。
6.所述信息采集模块包括固定杆、摄像头组、激光雷达和定位模块。固定杆安装在十字路口的转弯处,摄像头组、激光雷达和定位模块安装在固定杆上,摄像头组中的摄像头数量由摄像头视角与视距的关系以及道路的宽度决定。
7.所述路边柜模块包括处理器、通信模块和存储设备。摄像头组、激光雷达和定位模块与处理器通信连接,处理器接收摄像头组采集的图片以及激光雷达采集的激光点云信息,并使用定位模块的位置信息修正;通信模块实现路边柜模块与云端服务器的数据交互,存储设备用于存储配置文件及紧急事件日志。
8.云端服务器接收路边柜上传的数据后,反馈到车载端。
9.作为优选,处理器通过api接收摄像头组与激光雷达采集的数据以及修改摄像头组与激光雷达的配置。
10.作为优选,通信模块为5g通信模块,符合c
‑
v2x标准。
11.一种十字路口场景下的车路协同方法,包括以下步骤:
12.步骤1、在一个十字路口安装1个路边柜模块,在4个转弯处安装4组信息采集模块,信息采集模块采集道路的图片、激光点云信息以及位置信息三种道路信息。
13.作为优选,任意2组相邻的信息采集模块之间的连线与道路垂直或平行。
14.步骤2、当多组信息采集模块采集到同一个物体的信息时,将图片信息以yux的形
式输出,得到对应的yi参数。根据激光点云信息判断4组信息采集模块与物体的距离,与物体越近的信息采集模块采集的图片具有更高的权重,根据图片的yi参数判断图片是否存在异常曝光,判断阈值由现场环境设定,物体准确信息的确定方法为:
15.case1、当权重最高的图片为正常曝光时,选择该图片与对应信息采集模块的激光点云信息作为物体的准确数据。
16.case2、当权重最高的图片为异常曝光,且剩余图片中只有一张图片为正常曝光时,选择该图片与对应信息采集模块的激光点云信息作为物体的准确数据。
17.case3、当权重最高的图片为异常曝光,且剩余图片中有多张图片为正常曝光时,则计算正常曝光图像的信息熵,将信息熵乘以对应图像的权重,作为物体的准确数据。
18.case4、当所有图片均为异常曝光时,路边柜模块根据现场环境调节曝光参数。
19.步骤3、路边柜模块接收信息采集模块采集的路面信息,根据步骤2完成预处理,然后以十字路口中心为原点、垂直地面向上的方向为z轴正方向、正北方向为y轴正方向、正东方向为x轴正方向建立三维直角坐标系,在该三维直角坐标系中记录道路信息。
20.步骤4、路边柜模块将步骤3中记录的道路信息分辨物体的类型、物体间的距离等,并将该数据发送到云端服务器,服务器中的管理系统对接受的信息进行处理后将路面实时情况反馈给即将驶入该十字路口的车辆,完成车路协同。
21.本发明具有以下有益效果:
22.通过摄像头组、激光雷达和定位模块组成的信息采集模块采集十字路口场景下的车辆行人数据,识别物体的类型,结合点云信息框选出不同类型的物体并记录框选的坐标,得到物体在一个坐标系下的大小和位置信息,综合所有物体的大小和位置信息计算各个物体之间的相对位置和相对方向,再将相对位置和方向信息转化为更易于驾驶员理解的可能存在碰撞的方向和距离预警、障碍物预警等预警信息,最后反馈到车载端,对十字路口的复杂路况进行分解、分析,并以十字路口建立管理系统,方便了车辆驾驶员调取所需的路况信息以做出安全、高效的决策,也方便了道路管理部分进行道路交通的大数据分析以改善道路交通的管理。
附图说明
23.图1为信息采集模块监测角度为135
°
的示意图;
24.图2为信息采集模块监测角度为270
°
的示意图;
25.图3为物体图像重叠时的物体信息确认方法的流程图;
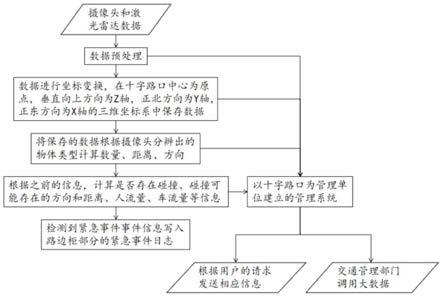
26.图4为十字路口场景下的车路协同方法的流程图。
具体实施方式
27.以下结合附图对本发明作进一步的解释说明;
28.一种十字路口场景下的车路协同装置,包括信息采集模块、路边柜模块、云端服务器和车载端。
29.所述信息采集模块包括固定杆、摄像头组、激光雷达和定位模块。固定杆安装在十字路口的转弯处,摄像头组、激光雷达和定位模块安装在固定杆上,摄像头组中的摄像头数量由摄像头视角与视距的关系以及道路的宽度决定,
30.所述路边柜模块包括处理器、通信模块和存储设备。摄像头组、激光雷达和定位模块与处理器通信连接,处理器通过api接收摄像头组采集的图片以及激光雷达采集的激光点云信息,修改摄像头组与激光雷达的配置,并使用定位模块的位置信息修正;符合c
‑
v2x标准的5g通信模块实现路边柜模块与云端服务器的数据交互,存储设备中存储了软、硬件配置文件与紧急事件日志。
31.云端服务器接收路边柜上传的数据后,反馈到车载端。
32.一种十字路口场景下的车路协同方法,包括以下步骤:
33.步骤1、在一个十字路口安装1个路边柜模块,在4个转弯处安装4组信息采集模块,其中任意2组相邻的信息采集模块之间的连线与道路垂直或平行。信息采集模块采集道路的图片、激光点云信息以及位置信息三种道路信息。
34.如图1所示,4个信息采集模块分别安装在图中的
①
、
②
、
④
和
⑤
四个位置,1个信息采集模块的正下方盲区可以由其它3个信息采集模块进行补充。当每个信息采集模块的监测范围为135
°
时,可以覆盖图1中的十字范围监测,并且存在一些检测重叠区域,使得同一被检测物体被多个信息采集部分同时检测到,如图2所示,当每个信息采集模块的监测范围达到270
°
时,可以全面覆盖十字路口,但是会存在大量的检测重叠区域。
35.在实际情况下,太阳光会从不同方向照射十字路口,部分面向太阳方向的信息采集模块可能会存在过曝光,而部分背向太阳的信息采集模块可能会存在欠曝光,或者当夜幕降临摄像头可能会普遍存在欠曝光,这些过曝光和欠曝光造成不同信息采集模块采集到的同一个被检测物体的数据存在一定的区别,进而会影响图像中物体类型的识别,因此需要通过步骤2重叠的信息进行确定。
36.步骤2、当多组信息采集模块采集到同一个物体的信息时,将图片信息以yux的形式输出,得到对应的yi参数,根据图片的yi参数判断图片是否存在异常曝光:
[0037][0038]
y
min
、y
max
为判断阈值,由现场环境设定。
[0039]
假设
①
、
②
、
④
和
⑤
位置上摄像头对检测到的同一物体的数据分别为x1、x2、x3和x4,对应位置上的激光雷达采集到的点云数据分别为x5、x6、x7和x8,根据点云数据为x5、x6、x7和x8可以转换得到
①
、
②
、
④
和
⑤
位置上摄像头与物体的大致距离为l1、l2、l3和l4,则不同摄像头拍摄的图片的权重α
i
为:
[0040][0041]
物体准确信息的确定方法为:
[0042]
case1、当权重最高的图片为正常曝光时,选择该图片与对应信息采集模块的激光点云信息作为物体的准确数据。
[0043]
case2、当权重最高的图片为异常曝光,且剩余图片中只有一张图片为正常曝光时,选择该图片与对应信息采集模块的激光点云信息作为物体的准确数据。
[0044]
case3、当权重最高的图片为异常曝光,且剩余图片中有多张图片为正常曝光时,则计算正常曝光图像的信息熵h:
[0045][0046]
其中,p
ij
为某个像素点的灰度值和它周围像素灰度分布的综合特征:
[0047]
p
ij
=f(i,j)/n2[0048]
其中(i,j)定义为特征二元组,i表示像素的灰度值,取值范围为[0,255],j表示领域灰度值,取值范围[0,255]。再将对应图片的信息熵h
i
乘以其权重α
i
,作为物体的准确数据。
[0049]
case4、当所有图片均为异常曝光时,路边柜模块根据现场环境调节曝光参数。
[0050]
步骤3、根据步骤2处理后的数据进行坐标转换,统一在以十字路口中心为原点、垂直地面向上的方向为z轴正方向、正北方向为y轴正方向、正东方向为x轴正方向建立三维直角坐标系下显示,当十字路口不是由南北和东西朝向的道路组成时,根据定位模块的位置信息进行道路朝向的修正。
[0051]
步骤4、如图4所示,路边柜模块将步骤3中记录的道路信息得到该十字路口范围内的车辆和行人信息,并且根据摄像头采集到的数据分辨物体的类型,根据激光雷达采集到的点云信息分析物体间的距离和方向,将这些信息结合之后,转换为是否存在碰撞的判断、碰撞可能存在的距离和方向、人流量和车流量等更易于理解、对驾驶决策更有意义的信息,处理器会检索这些信息,将出现的车车碰撞、人车碰撞、车辆故障长时停车等事件作为紧急事件以紧急事件日志的形式写入路边柜部分的存储设备。并将分析后的数据发送到云端服务器,服务器中的管理系统对接受的信息进行处理后将路面实时情况反馈给即将驶入该十字路口的车辆,播报预警信息,提前为驾驶员做好路径规划,完成车路协同。
[0052]
此外,道路管理部门可以读取云端服务器中的大数据,以分析车流量、人流量、事故多发路段等多项数据,用于改善道路的管理或快速处理突发的交通事故。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

