1.本技术涉及交通技术领域,尤其涉及一种计算道路通行能力的方法和装置。
背景技术:
2.道路通行能力是指道路上某一点、某一车道或某一断面处,单位时间内可能通过的最大交通实体(车辆或行人)数。众所周知,道路通行能力会因各种影响因素而发生较大的变化。当前计算道路通行能力采用折减系数法,即在计算过程中先选取对交通有影响的因素,并确定其修正系数,最后利用修正系数乘以基本通行能力得到实际的道路通行能力。若利用折减系数法计算隧道路段的通行能力,则计算结果是不能反映隧道路段的实际有效通行能力,原因在于,影响隧道路段通行能力的因素众多,比如,隧道路段车辆运行特征复杂并且存在影响驾驶行为的“墙效应”,而折减系数法并未考虑隧道路段实际的车辆特征和驾驶行为相关的因素,仅根据工程经验以修正系数的方式来估算隧道路段车辆特征和驾驶行为对实际通行能力的影响。显然,这种折减系数法计算得到的隧道路段的道路通行能力存在主观性和不确定性,因此,如何准确地计算出道路通行能力是当前急需解决的问题。
技术实现要素:
3.本技术提供了一种计算道路通行能力的方法和装置,能够准确地计算出道路通行能力。
4.第一方面,一种计算道路通行能力的方法,包括:获取路网数据、道路属性数据、车辆特征数据、驾驶行为数据、交通需求训练数据和交通需求真实数据;根据所述路网数据构建第一交通模型;根据所述道路属性数据、所述车辆特征数据、所述驾驶行为数据和所述第一交通模型构建第二交通模型;根据所述交通需求训练数据和预设误差训练所述第二交通模型;根据所述交通需求真实数据计算所述第二交通模型的道路通行能力。
5.上述方法通过真实路网数据构建第一交通模型,并在第一交通模型的基础上,从道路属性、车辆特征、驾驶行为这三个层面构建能真实反映道路实际情况的第二交通模型,之后,再根据真实的交通需求训练数据多次训练该第二交通模型,直到该第二交通模型能准确地预测出实际路段的道路通行能力。本技术构建的第二交通模型考虑了驾驶行为和车辆特征这两方面的因素,能够准确地预测出隧道路段的道路通行能力,因此,相比仅根据道路属性数据训练得到的交通模型,本技术提出的基于多方面数据融合构建的第二交通模型在预测实际路段的道路通行能力方面表现的更优,比如,第二交通模型输出的预测结果不仅准确性高而且可靠性强。
6.可选地,所述路网数据包括卫星地图数据和交通控制数据,所述根据所述路网数据构建第一交通模型,包括:根据所述卫星地图数据构建路网模型;根据所述路网模型和所述交通控制数据构建所述第一交通模型。
7.可选地,所述第一交通模型包括道路属性参数、车辆特征参数和驾驶行为参数,所述根据所述道路属性数据、所述车辆特征数据、所述驾驶行为数据和所述第一交通模型构
建第二交通模型,包括:根据所述道路属性数据设置所述道路属性参数;根据所述车辆特征数据设置所述车辆特征参数;根据所述驾驶行为数据设置所述驾驶行为参数;根据所述道路属性参数、所述车辆特征参数和所述驾驶行为参数构建所述第二交通模型。
8.通过多方面数据融合构建第二交通模型,能够提高该第二交通模型预测实际路段的道路通行能力的准确性。
9.可选地,所述预设误差包括预设流量误差和预设速度误差,所述根据所述交通需求训练数据和预设误差训练所述第二交通模型,包括:将所述交通需求训练数据输入所述第二交通模型,得到道路流量预测值和道路速度预测值;当所述道路流量预测值与道路流量真实值的误差值大于或者等于所述预设流量误差时,并且,当所述道路速度预测值与道路速度真实值的误差值大于或者等于预设速度误差时,调整所述第二交通模型;当所述道路流量预测值与道路流量真实值的误差值小于预设流量误差时,并且,当所述道路速度预测值与道路速度真实值的误差值小于预设速度误差时,确定不调整所述第二交通模型。
10.根据第二交通模型输出的预测值与真实值之间的差异来快速地确定是否要继续优化该第二交通模型。
11.可选地,所述驾驶行为参数包括车辆属性参数、跟驰模型参数和自由车道选择换道模型参数,所述跟驰模型参数包括:适用于城市道路交通环境的跟驰模型参数和适用于高速公路道路交通环境的跟驰模型参数。
12.可选地,所述跟驰模型参数包括:车辆期望安全距离的加和项和车辆期望安全距离的乘数项。
13.可选地,所述道路属性数据包括:道路等级、自由流速度和通行能力;所述车辆特征数据包括:包括加减速度函数、期望速度分布、时间分布、颜色分布;所述驾驶行为数据包括:车辆类型、车辆型号、跟车行为、换道行为和横向行为;所述交通需求训练数据包括:交通需求时间切分训练数据和交通需求车型切分训练数据;所述交通需求真实数据包括:交通需求时间切分真实数据和交通需求车型切分真实数据。
14.第二方面,提供了一种计算道路通行能力的装置,所述装置包括处理器和存储器,所述存储器用于存储计算机程序,所述处理器用于从所述存储器中调用并运行所述计算机程序,使得所述装置执行第一方面中任一项所述的方法。
15.第三方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储了计算机程序,当所述计算机程序被处理器执行时,使得处理器执行执行第一方面中任一项所述的方法。
附图说明
16.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
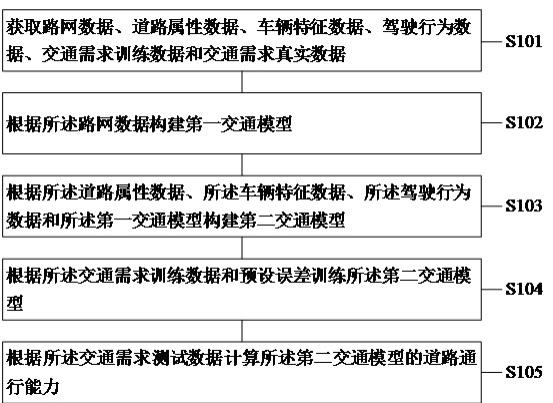
17.图1是本技术一实施例提供的计算道路通行能力的方法流程示意图;图2是本技术一实施例提供的荷坳隧道交通仿真模型示意图;图3是本技术一实施例提供的第二交通模型参数示意图;
图4是本技术又一实施例提供的饱和流率曲线示意图;图5是本技术又一实施例提供的输出的仿真评估断面流量随输入的交通需求变化的曲线示意图;图6是本技术一实施例提供的荷坳隧道的速度
‑
流量曲线示意图;图7是本技术一实施例提供的计算道路通行能力的方法的整体流程示意图;图8是本技术一实施例提供的第二交通模型校正方法的流程示意图;图9是本技术一实施例提供的计算道路通行能力的装置示意图。
具体实施方式
18.以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本技术实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本技术。在其它情况中,省略对众所周知的系统、装置以及方法的详细说明,以免不必要的细节妨碍本技术的描述。
19.应当理解,当在本技术说明书和所附权利要求书中使用时,术语“包括”判别所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
20.还应当理解,在本技术说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
21.另外,在本技术说明书和所附权利要求书的描述中,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为判别或暗示相对重要性。
22.在本技术说明书中描述的参考“一个实施例”或“一些实施例”等意味着在本技术的一个或多个实施例中包括结合该实施例描述的特定特征、结构或特点。由此,在本说明书中的不同之处出现的语句“在一个实施例中”、“在一些实施例中”、“在其他一些实施例中”、“在另外一些实施例中”等不是必然都参考相同的实施例,而是意味着“一个或多个但不是所有的实施例”,除非是以其他方式另外特别强调。术语“包括”、“包含”、“具有”及它们的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。
23.下面将结合附图详细描述本技术提供的计算道路通行能力的方法。下文以分析隧道路段的道路通行能力为例进行示例性说明,并不构成对本技术应用场景的任何限制。
24.由于道路通行能力会因各种影响因素而发生较大的变化,因此,只有根据道路的实际情况来计算道路通行能力才比较准确。而当前计算道路通行能力通常采用折减系数法,即在计算过程中先选取对交通有影响的因素,并确定其修正系数,最后利用修正系数乘以基本通行能力得到实际的道路通行能力。若利用折减系数法计算隧道路段的通行能力,则计算结果是不能反映隧道路段的实际有效通行能力,原因在于,影响隧道路段通行能力的因素众多,比如,隧道路段车辆运行特征复杂并且存在影响驾驶行为的“墙效应”,而折减系数法并未考虑隧道路段实际的车辆特征和驾驶行为相关的因素,仅根据工程经验以修正系数的方式来估算隧道路段车辆特征和驾驶行为对实际通行能力的影响。显然,这种折减系数法计算得到的隧道路段的道路通行能力存在主观性和不确定性,因此,如何准确地计算出道路通行能力是当前急需解决的问题。
25.如图1所示,本技术提供了一种计算道路通行能力的方法。该方法包括:
s101,获取路网数据、道路属性数据、车辆特征数据、驾驶行为数据、交通需求训练数据和交通需求真实数据。
26.示例性地,若要构建某路段(比如隧道路段)高可信度的微观交通模型,则需要采集该路段不同层面的道路数据,该道路数据包括地磁流量数据、车辆全球卫星定位系统(global positioning system,gps)数据和地图导航数据,其中,地磁流量数据可以利用地磁流量检测设备(比如,地磁车辆检测器)采集,并且,通过分析该地磁流量数据可以获得地磁流量检测设备监测的道路车流量数据;通过分析车辆gps数据可以获得公共交通工具(比如,出租车或者公交车等)出行的导航数据;该地图导航数据包括百度地图数据和高德地图数据,通过分析该地图导航数据可以获得私人交通工具(比如,私家轿车、电动车等)出行的导航数据。该车辆gps数据和地图导航数据可以由百度或者高德软件有限公司提供,本技术对车辆gps数据和地图导航数据具体使用哪种类型的地图数据以及该地图数据由哪个公司提供不作任何限定。
27.示例性地,通过分析地图数据(比如,百度地图数据或者高德地图数据)可以获取某路段的路网数据,该路网数据包括卫星地图数据和交通控制数据,其中,卫星地图数据可以是百度地图数据也可以是高德地图数据,本技术对卫星地图数据的类型不作任何限定。该卫星地图数据包括基本路段数据、交织区数据、分流区数据、合流区数据和隧道影响区数据,其中,基本路段数据用于构建道路或匝道上车辆运行不受交织、分流和合流影响的路段;交织区数据用于构建道路上的两股或多股车流实现汇合、交织、分离完成车道转换交织的路段;分流区数据用于构建道路上的一股车流分成两股以上车流的路段;合流区数据用于构建道路上的两股或多股车流汇聚成一股车流的路段;隧道影响区数据用于模拟隧道路段对车辆及驾驶员的影响。
28.上述交通控制数据包括交通信号灯数据、车辆禁行数据、禁止变道数据和减速区域数据,其中,交通信号灯数据是指在路段的部分区域设置交通信号灯的数据,比如,在a路段的x路口设置交通信号灯,以方便行人和车辆安全有序地通过该x路口;车辆禁行数据是指在路段的部分区域设置车辆禁行标志的数据,比如,在a路段的y区域设置禁止机动车通行标志;禁止变道数据是指在路段的部分区域设置车辆禁行变道的数据,比如,在a路段的z区域设置禁止变道标志;减速区域数据是指在路段的部分区域设置车辆减速的数据,比如,在a路段的w区域(比如,w区域附近是学校)设置车辆减速标志,以防止车速太快撞到行人。
29.通过分析车辆gps数据和地图导航数据可以获得待分析路段(比如,隧道路段)不同层面的交通数据,该交通数据包括道路属性数据、车辆特征数据和交通量数据,其中,交通需求训练数据和交通需求真实数据可以通过分析交通量数据获得,该交通量数据可从监测路段流量和路段速度的监测设备获得。上述道路属性数据包括道路等级、自由流速度(即某个路段最大允许通行的速度)和通行能力(即某个路段每小时可以通过车辆数量的最大值)。车辆特征数据包括加减速度函数(即速度变化函数)、期望速度函数(即均值速度函数)、时间分布和颜色分布,其中,加减速度函数用于反映某路段不同时刻车辆运行速度的变化情况,期望速度函数用于反映某路段不同时刻车辆平均速度的变化情况,时间分布用于反映某路段的车辆数量在不同时刻的分布情况,颜色分布用于反映某路段不同时刻车辆颜色的分布情况。
30.交通需求训练数据包括交通需求时间切分训练数据和交通需求车型切分训练数
据,其中,交通需求时间切分数据是指不同时刻向某路段输入车辆数量的数据,比如,在t1时刻,向a路段输入200辆车,在t2时刻,向a路段输入500辆车,在t3时刻,向a路段输入800辆车;交通需求车型切分数据是指不同时刻向某路段输入车辆类型数量的数据,比如,在t1时刻,向b路段输入150辆小汽车、20辆大客车和30辆重型卡车,在t2时刻,向b路段输入150辆小汽车、50辆货车、20辆环卫车和80辆越野车,在t3时刻,向b路段输入200辆小汽车、100辆货车、40辆大客车和6辆重型卡车。交通需求真实数据包括交通需求时间切分真实数据和交通需求车型切分真实数据,其中,交通需求时间切分真实数据是指不同时刻某路段实际车辆数量的数据,比如,在t1时刻,a路段实际有200辆车,在t2时刻,a路段实际有500辆车,在t3时刻,a路段实际有800辆车;交通需求车型切分真实数据是指不同时刻某路段实际车辆类型数量的数据,比如,在t1时刻,b路段实际有200辆小汽车、50辆大客车和50辆重型卡车,在t2时刻,b路段实际有300辆小汽车、80辆货车、20辆环卫车和100辆越野车,在t3时刻,b路段实际有300辆小汽车、100辆货车、80辆大客车和20辆重型卡车。
31.上述驾驶行为数据可以通过分析驾驶模拟器采集的驾驶人员在某路段(比如,隧道路段)驾驶时的行为数据而获得的。该驾驶行为数据包括车辆类型、车辆型号、跟车行为、换道行为和横向行为;其中,车辆类型包括轿车、货车、客车、挂车、非完整车辆和摩托车等;车辆型号是指同一类型不同型号的车辆,比如,车辆类型为货车,该货车型号包括载货汽车型号、载重汽车型号和卡车型号;跟车行为是指特定车群中的每个成员车辆都保持相同速度前后尾随行驶,比如,跟车行为可以是后车距离前车的行驶距离;换道行为是指驾驶员根据自身驾驶需求以及周围车辆的运行状态变换车道的行为。横向行为是指驾驶员在垂直行车方向上的各种驾驶行为,比如,驾驶员在垂直行车方向上进行换道的行为。
32.s102,根据上述路网数据构建第一交通模型。
33.示例性地,通过交通仿真软件(比如,vissim仿真软件)构建第一交通模型,具体地,首先根据上述卫星地图数据构建路网模型(即基础路网层),然后在路网模型上标记上述交通控制数据以得到第一交通模型,最后,向第一交通模型输入交通需求训练数据,以使得第一交通模型处于可运行状态。例如,利用vissim仿真软件构建一个第一交通模型为深圳市机荷高速改扩建工程荷坳隧道(即荷坳隧道仿真模型),根据卫星地图数据可以分析出荷坳隧道的路网数据,该荷坳隧道的路网数据包括:道路等级为高速公路,自由流速度为100km/h,双向八车道,荷坳隧道左线全长为6174m,荷坳隧道右线全长5585m,全线最小曲线半径r=1500m,最大纵坡坡度k=2.5%,最大纵坡坡度的坡长l=1600m。基于vissim仿真软件构建的荷坳隧道仿真模型(即第一交通模型),如图2所示。此外,根据卫星地图数据还可以分析出机荷高速地面层的路网数据,利用vissim仿真软件根据机荷高速地面层的路网数据构建的机荷高速地面层仿真模型(见图2),与利用vissim仿真软件构建荷坳隧道仿真模型的方法相同,此处不再赘述。
34.s103,根据上述道路属性数据、上述车辆特征数据、上述驾驶行为数据和上述第一交通模型构建第二交通模型。
35.示例性地,通过交通仿真软件(比如,vissim软件)构建第二交通模型,该第二交通模型是通过对第一交通模型的道路属性参数、车辆特征参数和驾驶行为参数进行参数设置构建的,如图3所示。其中,根据道路属性数据设置道路属性参数,即根据道路属性数据设置第一交通模型的道路属性参数,具体地,利用道路属性数据中的道路等级数据设置第一交
通模型的道路等级;利用道路属性数据中的自由流速度数据设置第一交通模型的自由流速度;利用道路属性数据中的通行能力数据设置第一交通模型的通行能力。例如,若待分析的a路段为城市道路,该a路段的道路等级为主干道,a路段的自由流速度为100km/h(即100千米/每小时),a路段的通行能力为1000pcu/h(即1000辆/每小时),则将第一交通模型中a路段的道路等级设置为主干道;将第一交通的模型中a路段的自由流速度设置为100km/h;将第一交通模型中a路段的通行能力设置为1000pcu/h。
36.上述根据车辆特征数据设置车辆特征参数,即根据车辆特征数据设置第一交通模型的车辆特征参数;具体地,利用车辆特征数据中的加减速度函数公式设置第一交通模型的加减速度函数;利用车辆特征数据中的期望速度函数公式设置第一交通模型的期望速度函数;利用车辆特征数据中的时间分布规则设置第一交通模型的时间分布;利用车辆特征数据中的颜色分布规则设置第一交通的模型的颜色分布。例如,若待分析的a路段的加减速度函数公式为下限为0、上限为3.5s、标准差为2和平均值为1.75的正态分布,a路段的期望速度函数为y=651.9*exp(
‑
(((x
‑
93.52)/11.34)^2)),a路段的时间分布规则为下限为0s、上限为40s、标准差为2和平均值为20的正态分布,a路段的颜色分布规则为50%黑色、35%白色、5%红色、6%蓝色和4%灰色,则将第一交通模型中a路段的加减速度函数设置为下限为0、上限为3.5s、标准差为2和平均值为1.75的正态分布;将第一交通模型中a路段的期望速度函数设置为y=651.9*exp(
‑
(((x
‑
93.52)/11.34)^2));将第一交通模型中a路段的时间分布设置为下限为0s、上限为40s、标准差为2和平均值为20的正态分布;将第一交通模型中a路段的颜色分布设置为50%黑色、35%白色、5%红色、6%蓝色和4%灰色。
37.例如,第一交通模型为荷坳隧道交通模型,该荷坳隧道的东行方向断面交通量为5328pcu/h,荷坳隧道的西行方向断面交通量为6072pcu/h;根据车牌来识别车辆类型占比,比如,小汽车占比83.1%,货车占比15.7%,客车占比1.2%;基于车辆gps数据统计分析不同车辆类型的车辆运行速度特征,统计结果发现车辆运行速度特征符合正态分布,如表1所示,可以根据不同车型的期望速度分布来设置车辆特征参数。
38.表1荷坳隧道交通模型不同车型的期望速度分布上述根据驾驶行为数据设置驾驶行为参数,即根据驾驶行为数据设置第一交通模型的驾驶行为参数,其中,驾驶行为参数包括车辆属性参数、跟驰模型(即跟车模型)参数和自由车道选择换道模型参数。利用驾驶行为数据中的车辆类型数据以及车辆型号数据设置第一交通模型的车辆属性参数,该车辆属性参数包括车辆类型和车辆类别;例如,待分析的a路段可以通行的车辆类型是轿车、货车和客车,a路段可以通行的车辆型号是x1型号的轿车、y1型号的货车和z1型号的客车,将第一交通模型中a路段可以通行的车辆类型设置为轿车、货车和客车;将第一交通模型中a路段可以通行的车辆型号设置为x1型号的轿车、y1型号的货车和z1型号的客车。特此说明,本技术对某路段(比如,a路段)可以通行的车辆类型
以及车辆型号均不作任何限定。
39.上述利用驾驶行为数据中的跟车行为数据以及横向行为数据设置第一交通模型的跟驰模型参数;该跟驰模型参数如表2所示。此外,根据待分析路段的道路性质不同(比如,待分析路段可以是城市道路也可以是高速公路),该跟驰模型参数包括适用于城市道路交通环境的跟驰模型参数和适用于高速公路道路交通环境的跟驰模型参数。例如,若待分析的a路段为城市道路,则根据a路段的跟车行为数据设置的跟驰模型参数就是城市道路交通环境的跟驰模型参数;若待分析的a路段为高速公路,则根据a路段的跟车行为数据设置的跟驰模型参数就是高速公路道路交通环境的跟驰模型参数;无论是城市道路交通环境的跟驰模型参数还是高速公路道路交通环境的跟驰模型参数,都是需要根据a路段的跟车行为数据和横向行为数据设置表2所示的几种跟驰模型参数,比如,a路段为高速公路,利用a路段跟车行为数据中的前视距离最值数据设置a路段跟驰模型参数(即高速公路道路交通环境的跟驰模型参数)中的前视距离最值(即最大值maxa和最小值mina);利用a路段横向行为数据中的观察到车辆数数据设置a路段跟驰模型参数中的观察到车辆数参数ov;利用a路段跟车行为数据中的后视距离最值数据设置a路段跟驰模型参数中的后视距离最值(即最大值maxb和最小值minb);利用a路段跟车行为数据中的暂时走神数据设置a路段跟驰模型参数中的暂时走神参数dura。
40.表2跟驰模型其他参数上述利用驾驶行为数据中的换道行为数据设置第一交通模型的自由车道选择换道模型参数。该自由车道选择换道模型参数如表3所示。上述换道行为数据包括最大减速度数据、
‑
1m/s2距离数据、可接受的减速度数据、消失前的等待时间数据、最小车头空距数据、安全距离折减系数数据、协调刹车最大减速度数据、最大速度差数据和换道距离数据。利用
换道行为数据中的最大减速度数据设置自由车道选择换道模型中的最大减速度参数maxd;利用换道行为数据中的
‑
1m/s2距离数据设置自由车道选择换道模型中的
‑
1m/s2参数ddis;利用换道行为数据中的可接受的减速度数据设置自由车道选择换道模型中的可接受的减速度参数mind;利用换道行为数据中的消失前的等待时间数据设置自由车道选择换道模型中的消失前的等待时间参数timed;利用换道行为数据中的最小车头空距数据设置自由车道选择换道模型中的最小车头空距参数hw;利用换道行为数据中的安全距离折减系数数据设置自由车道选择换道模型中的安全距离折减系数参数safe;利用换道行为数据中的协调刹车最大减速度数据设置自由车道选择换道模型中的协调刹车最大减速度参数maxcd;利用换道行为数据中的最大速度差数据设置自由车道选择换道模型中的最大速度差参数maxsd;利用换道行为数据中的换道距离数据设置自由车道选择换道模型中的换道距离参数lcdist。
41.表3自由车道选择换道模型
参数名称定义范围maxd最大减速度车辆制动时,车辆的最大减速度,该最大减速度单位为米/秒平方。(m/s2)
‑
3~
‑
9(m/s2)ddis
‑
1m/s2距离减速度的变化率(m/s2),表示最大减速度随着与紧急停车位置之间的距离的增加。50~200(m)mind可接受的减速度车辆制动时,车辆的最低减速度。
‑
3~
‑
1(m/s2)timed消失前的等待时间车辆在紧急停车位置等待车道变换空档出现的最长时间。达到该最长时间时,车辆将从路网中消失,同时错误文件中将记录车辆消失的时间(用秒表示)和位置(用米表示)。30~120(m)hw最小车头空距成功超车所需的前车和后车之间的最小车头间距(用米表示,即m)。0.1~0.6(m)safe安全距离折减系数当发生车辆换道时的安全距离为原始安全距离乘以安全折减系数,当换道行为结束后安全距离为重新恢复到原始的安全距离。0.1~0.6maxcd协调刹车最大减速度当驾驶员允许其他车辆变换到自己行驶的当前车道上时,需要相应地协调刹车。(m/s2)
‑
9~
‑
3(m/s2)maxsd最大速度差最大速度差,用米/每秒(即m/s)表示。5~20(m/s)lcdist换道距离试图换道距离,用米(即m)表示。50~150(m)
由于本技术在构建第二交通模型时,是在第一交通模型的基础上,根据路段的道路属性数据设置第一交通模型的道路属性参数,根据某路段的车辆特征数据设置第一交通模型的车辆特征参数,以及根据某路段的驾驶行为数据设置第一交通模型的驾驶行为数据参数,以构建第二交通模型。相比仅根据道路属性数据训练得到的交通模型,本技术构建的第二交通模型不仅考虑了道路的车辆特征和驾驶行为特征这两方面的因素,而且在第二交通模型构建时融合了多方面数据(比如,道路属性数据、车辆特征数据和驾驶行为数据等),因此,该第二交通模型在预测实际路段的道路通行能力方面表现的更优,比如,第二交通模型输出的预测结果不仅准确性高而且可靠性强。
42.s104,根据上述交通需求训练数据和预设误差训练上述第二交通模型。
43.示例性地,根据上述交通需求训练数据和预设误差训练上述第二交通模型,该第二交通模型的校正目标(即训练目标)是第二交通模型输出的道路流量预测值与道路流量真实值的误差值小于预设流量误差,并且,第二交通模型输出的道路速度预测值与道路速度真实值的误差值小于预设速度误差,其中,预设流量误差为15%,预设速度误差为15%。通过设置上述第二交通模型的交通需求参数训练该第二交通模型,该交通需求参数包括交通需求时间切分参数和交通需求车型切分参数,若利用某路段的交通需求训练数据设置第二交通模型的交通需求参数,则交通需求训练数据用于训练该第二交通模型;若利用某路段的交通需求真实数据设置训练后的第二交通模型的交通需求参数,则交通需求真实数据用于利用训练后的第二交通模型计算某路段的通行能力。
44.上述交通需求训练数据包括交通需求时间切分训练数据和交通需求车型切分训
练数据;而交通需求真实数据包括交通需求时间切分真实数据和交通需求车型切分真实数据。利用交通需求时间切分训练数据设置交通需求时间切分参数,利用交通需求车型切分数据设置交通需求车型切分参数,设置完交通需求时间切分参数和交通需求车型切分参数后,运行第二交通模型,第二交通模型输出道路流量预测值和道路速度预测值,当道路流量预测值与道路流量真实值的误差值大于或者等于预设流量误差时,并且,当道路速度预测值与道路速度真实值的误差值大于或者等于预设速度误差时,调整第二交通模型;当道路流量预测值与道路流量真实值的误差值小于预设流量误差时,并且,当道路速度预测值与道路速度真实值的误差值小于预设速度误差时,确定不调整第二交通模型。上述道路速度预测值是指待测路网车辆的平均速度,道路速度真实值是指待测路网车辆的实际平均速度,而道路流量预测值是指待测路网平均每小时的车流量,道路流量真实值是指待测路网平均每小时的实际车流量,上述路网是指由主路、辅路、支路、岔路等多条道路构成的交通道路,待测路网应该满足od≥15
×
15,即待研究路网的起始点至少为15个,终止点至少为15个,od交通量就是指起终点间的交通出行量。预设速度误差是指道路速度预测值与道路速度真实值之间最大允许的误差值,预设流量误差是指道路流量预测值与道路流量真实值之间最大允许的误差值。
45.利用多组交通需求训练数据训练第二交通模型,直到该第二交通模型输出的道路速度预测值与道路速度真实值的误差值小于预设速度误差,并且,道路流量预测值与道路流量真实值的误差值小于预设流量误差时,该第二交通模型才符合校正目标。由此可见,可以通过第二交通模型输出的预测值与真实值之间的差异来快速地确定是否要继续优化该第二交通模型。
46.例如,预设速度误差e
v
为15%,预设流量误差e
q
为15%,待测路网(即第二交通模型)为高速路网,该第二交通模型为15个起始点和15个终止点,上述每个起止点到任意一个终止点的路线是任意的。比如,在t1时刻,向第二交通模型的a起点输入200辆车,该200辆车包括150轿车、30货车和20客车;在t2时刻,向第二交通模型的a起点输入300辆车,该300辆车包括200轿车、80货车和20挂车,运行该第二交通模型,车辆在第二交通模型中运行一小时后,观察第二交通模型终止点a1在t3时刻输出的道路流量预测值q1和道路速度预测值v1,比如,若道路流量预测值q1为80辆/h,道路速度预测值v1为40km/h,道路流量真实值q
r
为100辆/h,道路速度真实值v
r
为30km/h,则道路流量预测值q1与道路流量真实值q
r
之间的误差为20%(即)大于预设流量误差e
q
为15%,上述道路流量预测值q1与道路流量真实值q
r
之间的误差可以用流量误差公式计算,如公式(1)所示。
47.道路速度预测值v1与道路流量真实值v
r
之间的误差为11%(即)大于预设速度误差e
v
为15%,上述道路流量预测值v1与道路流量真实值v
r
之间的误差可以用速度误差公式计算,如公式(2)所示。
48.由于道路流量预测值q1与道路流量真实值q
r
的误差值大于预设流量误差e
q
,并且,
道路速度预测值v1与道路速度真实值v
r
的误差值大于预设速度误差e
v
,因此,该第二交通模型不满足要求,需要通过调整第二交通模型的部分参数后,重新根据交通需求训练数据训练该第二交通模型,直到该第二交通模型符合要求。
49.示例性地,当第二交通模型不符合校正目标时,可以通过调整驾驶行为模型参数来提高第二交通模型预测道路速度和道路流量的准确性。例如,由于跟驰模型(即跟车模型)中的两个核心参数可以确定饱和流率,而饱和流率和驾驶员习惯的最小跟车距离有关,因此,可以通过调整跟驰模型中的这两个核心参数:车辆期望安全距离的加和项(additive part of desired safety distance,bx_add)和车辆期望安全距离的乘数项(multiplic. part of desired safety distance,bx_mult)来提高第二交通模型预测道路速度和道路流量的准确性。上述bx_mult的值通常等于bx_add的值加1。上述两个参数重点反应了车辆在跟车状态下,车辆之间期望的安全距离bx如下:根据公式(3)可知,bx_add值越大,车辆在跟车状态下保持的期望安全距离会越大,会造成饱和流率相应降低,通过调节设定合适的bx_add值满足实际交通状况,因为实际交通中,不同车辆之间的安全距离不同,会导致交通的实际运行状况不同。图4示出了有无大车运行情况下的饱和流率,其中,401表示无大车运行情况下的饱和流率,402表示含5%大车运行情况下的饱和流率。由图4可知,当饱和流率接近2200pcu/h,即接近道路设计通行能力,可以设置bx_add值为3.25,bx_mult值为2.25。
50.当跟驰模型中的参数bx_add值为3.25,bx_mult值为2.25,并且,路段为高速公路时,第二交通模型输出的路段流量与路段实际监测出的路段流量之间的误差范围为6%~12%,平均误差值为9.8%,以及第二交通模型输出的路段速度与路段实际监测出的路段速度之间的误差范围为3%~12%,平均误差值为7.7%,由此可见,该第二交通模型符合校正目标。
51.例如,预设速度误差e
v
为15%,预设流量误差e
q
为15%,待测路网(即第二交通模型)为高速路网,该第二交通模型为15个起始点和15个终止点,上述每个起止点到任意一个终止点的路线是任意的。比如,在t1时刻,向第二交通模型的a起点输入100辆车,该100辆车包括50轿车、30货车和20客车;在t2时刻,向第二交通模型的a起点输入200辆车,该200辆车包括100轿车、60货车和40挂车,运行该第二交通模型,车辆在第二交通模型中运行一小时后,观察第二交通模型终止点b在t3时刻输出的道路流量预测值q1和道路速度预测值v1,比如,若道路流量预测值q1为80辆/h,道路速度预测值v1为45km/h,道路流量真实值q
r
为90辆/h,道路速度真实值v
r
为50km/h,则道路流量预测值q1与道路流量真实值q
r
之间的误差为11%(即)小于预设流量误差e
q
为15%,上述道路流量预测值q1与道路流量真实值q
r
之间的误差可以用流量误差公式计算,如公式(1)所示。道路速度预测值v1与道路流量真实值v
r
之间的误差为11%(即)小于预设速度误差e
v
为15%,上述道路流量预测值v1与道路流量真实值v
r
之间的误差可以用速度误差公式计算,如公式(2)所示。由于道路流量预测值q1与道路流量真实值q
r
的误差值小于预设流量误差e
q
,并且,道路速度预测值v1与道路速度真实值v
r
的误差值小于预设速度误差e
v
,因此,得到满足要求的第二交通模型,该第二交通模型可以直接用于预测待分析路段的道路通行能力而不需要调整该第二交通模型。
52.通过交通需求训练数据和第二交通模型校正目标得到训练后的第二交通模型,该训练后的第二交通模型可以用于实际路段道路通行能力的计算。
53.s105,根据上述交通需求真实数据计算上述第二交通模型的道路通行能力。
54.示例性地,上述第二交通模型为隧道路段交通模型,利用该隧道路段交通模型计算隧道路段的道路通行能力。向隧道路段交通模型输入同一断面不同的交通需求真实数据为某路段的断面交通量(即输入不同交通需求),通过向隧道路段交通模型输入不同的断面交通量来模拟不同交通需求输入条件下隧道路段的交通运行状况,比如,向隧道路段交通模型输入的断面交通量分别为500pcu/天、1500pcu/天、2500pcu/天、3500pcu/天、4500pcu/天、5500pcu/天、6500pcu/天、7500pcu/天和8500pcu/天,该隧道路段交通模型分别在不同断面交通量的输入情况下输出的仿真评估断面流量曲线501如图5所示。根据图5可以看出,随着输入的交通需求的增加,输出的仿真评估断面流量也在同步递增,当输入的交通需求增加至6000pcu/h后,断面流量不再增加,6000pcu/h后的部分交通需求(比如,6500pcu/h至8500pcu/h)被抑制,隧道路段的交通运行状况达到饱和,由此可见,该隧道路段的道路通行能力为6000pcu/h。
55.为了验证隧道交通模型评估上述隧道路段的道路通行能力的可靠性,现对上述隧道路段进行实地考察以得到实际的速度
‑
流量曲线,比如,通过调研不同时段、不同区间路段的交通运行状况,以及抽样调查该隧道路段的断面交通流量及速度,得到如图6所示的隧道路段的速度
‑
流量曲线,图6中曲线601和曲线602分别对应了两种交通运行状态:曲线601代表稳定流和曲线602代表拥堵流。根据曲线601可知,在稳定流状态下,车辆的驾驶行为具有一定的规律,速度
‑
流量关系特征明显,对于不同的流量,速度变化很小。根据曲线602可知,在拥堵流状态下,出现大范围的拥堵,驾驶员的驾驶行为受到严重的限制,车辆的速度分布没有规律,无明显的速度
‑
流量关系特征。在稳定流和拥堵流的交界处(图6中白色虚线所示),交通运行状况达到饱和,该隧道路段的道路通行能力为6000pcu/h。由此可见,基于隧道交通模型评估的隧道路段的道路通行能力与基于实际速度
‑
流量曲线得到的隧道路段的道路通行能力基本相同,因此,可以判定基于隧道交通模型评估隧道路段的道路通行能力的方法是可靠的。
56.示例性地,向第二交通模型(即训练后的第二交通模型)输入某路段的交通需求真实数据,该训练后的第二交通模型输出的道路速度和道路流量,根据该道路流量和道路速度计算某路段的道路通行能力。利用训练后的第二交通模型计算不同场景下的路段的道路通行能力,x表示不同的交通需求输入(即不同的交通仿真测试场景),x的输入值设定规则如下:,其中,,表示道路的基准通行能力(pcu/h),表示x的最大值应该大于或者等于道路的基准通行能力值。例如,训练后的第二交通模型为隧道路段交通模型,向隧道路段交通模型输入分别输入x1=100pcu/h(即x1场景),x2=200pcu/h(即x2场景),x3=300pcu/h(即x3场景),输入完x1后,运行隧道路段交通模型,该隧道路段交通模型输出隧道路段流量l1和隧道路段道路速度v1;输入完x2后,运行隧道路段交通模型,该隧道路段交通模型输出隧道路段流量l2和隧道路段道路速度v2;输入完x3后,运行隧道路段交通模型,该隧道路段交通模型输出隧道路段流量l3和隧道路段道路速度v3,计算并统计不同输入x下(即不同x场景下)
隧道路段交通模型输出的隧道路段道路流量和隧道路段道路速度。比如,每种场景下隧道路段道路流量预测公式如下:其中,表示x场景(比如,x1场景)运行下隧道路段流量的统计结果(pcu/h),表示某一种车型的每小时过车交通量(veh/h),其中,车型包括小汽车、中型客车、大型客车、大货车等,表示某一种车型的折算系数,比如,小汽车为1,中型客车为2,大型客车与货车为2.5。
57.每种场景下隧道路段道路速度预测公式如下:其中,表示x场景(比如,x1场景)运行下隧道路段车辆速度的统计结果(km/h),l表示隧道路段长度(km),表示第辆车通过该道路的行程时间(h),n表示仿真中观测行程时间的次数。
58.根据每种场景下隧道路段交通模型输出的隧道路段道路流量和隧道路段道路速度计算隧道路段的道路通行能力,即计算单位时间内隧道路段最大允许通过的车辆数,而道路通行能力与道路的跟车时距密切相关,跟车时距越小,道路表现出来的实际通行能力则越大。本发明通过统计每种场景下的隧道路段道路流量和隧道路段道路速度指标,计算隧道路段的密度与车头时距,从而推算出隧道路段的道路通行能力,计算过程如下:式中,表示x场景(比如,x1场景)运行下的交通密度(pcu/h/km)。
59.式中,表示x场景(比如,x1场景)运行下的车头间距(m/pcu)。
60.式中,表示x场景(比如,x1场景)运行下的车头时距(s/pcu)。
61.式中,表示道路的道路通行能力(pcu/h),比如,待分析的道路为隧道路段,隧道路段的仿真场景有三种,分别为x1场景、x2场景和x3场景。若x1场景的车头时距为、x2场景为和x3场景为,则x1场景的道路通行能力为、x2场景的道路通行能力为和x3场景的道路通行能力为。将x1场景的道路通行能力、x2场景的道路通行能力和x3场景的道路通行能力进行比较,发现x2场景的道路通行能力最大,则道路的道路通
行能力。
62.上述实施例仅以隧道路段为例介绍了本技术的计算道路通行能力的方法,本技术提供的计算道路通行能力的方法还适用于高速公路、城市快速路、主干路等重要通道的道路通行能力计算,具体地分析方法类似隧道路段的分析方法,此处不再赘述。
63.为了更好地说明本技术提供的计算道路通行能力的方法,下面通过图7说明本技术计算道路通行能力的方法的整个流程步骤:步骤1:高可信微观交通仿真模型(即第二交通模型)构建。首先进行多源数据分析,即分析出构建第二交通模型所需要的数据,比如路网数据、路网数据、道路属性数据、车辆特征数据、驾驶行为数据、交通需求训练数据和交通需求真实数据,其中,驾驶行为数据通过驾驶模拟器分析多名驾驶人员的实际驾驶数据得到。利用交通仿真软件,根据路网数据对基础路网(即第一交通模型)进行构建。在第一交通模型的基础上进行仿真参数的标定,即进行道路属性参数、车辆特征参数、驾驶行为参数的设置,以得到第二交通模型,根据交通需求参数的交通需求训练数据训练第二交通模型(即仿真结果校核),以使得第二交通模型满足精度要求。
64.步骤2:仿真测试场景设计。按照交通需求递增的方式设计测试场景,测试场景用于训练第二交通模型,比如,场景0:输入a=100辆车,场景1:输入200(即a 100)辆车,场景2:输入300(即a 200)辆车,场景n:输入n*100辆车。
65.步骤3:仿真结果统计分析。通过第二交通模型计算路段的实际通过交通量,由于在第二交通模型中输入不同的应用测试场景会得到不同应用场景下的道路流量和道路速度,因此,可以绘制不同应用场景下的速度
‑
流量曲线,通过速度
‑
流量曲线可以看出该路段的道路服务水平,根据道路服务水平判断道路饱和状态(即研判饱和状态),根据研判饱和状态判断实际有效通行能力(即道路通行能力)。
66.下面通过图8说明训练(即校正)第二交通模型的具体流程步骤。
67.步骤1:校正(即训练)开始。校正开始之前需要进行模型校正前的准备工作,该准备工作包括准备校正模型的校正数据(即交通需求训练数据)。
68.步骤2:参数选择。选择校正第二交通模型需要调整的校正参数,该校正参数可以是第二交通模型中跟驰模型参数。
69.步骤3:参数校正。通过向第二交通模型输入不同的校正数据,将第二交通模型输出的结果与校正标准进行比对,以确定是否需要调整校正参数。当第二交通模型输出的结果与校正标准相差很大,则对校正参数进行重新调整;当第二交通模型输出的结果与校正标准相近,则校正结束,说明该校正参数下的第二交通模型符合要求。
70.图9示出了本技术提供了一种计算道路通行能力的装置结构示意图。图9中的虚线表示该单元或该模块为可选的。装置900可用于实现上述方法实施例中描述的方法。装置900可以是电子设备,例如,服务器、芯片等。
71.装置900包括一个或多个处理器901,该一个或多个处理器901可支持装置900实现图1所对应方法实施例中的方法。处理器901可以是通用处理器或者专用处理器。例如,处理器901可以是中央处理器(central processing unit,cpu)。cpu可以用于对装置900进行控制,执行软件程序,处理软件程序的数据。装置900还可以包括通信单元905,用以实现信号
的输入(接收)和输出(发送)。
72.例如,装置900可以是芯片,通信单元905可以是该芯片的输入和/或输出电路,或者,通信单元905可以是该芯片的通信接口,该芯片可以作为电子设备的组成部分。
73.又例如,装置900可以是电子设备,通信单元905可以是该电子设备的收发器,或者,通信单元905可以是该电子设备的收发电路。
74.装置900中可以包括一个或多个存储器902,其上存有程序904,程序904可被处理器901运行,生成指令903,使得处理器901根据指令903执行上述方法实施例中描述的方法。可选地,存储器902中还可以存储有数据(如待测芯片的id)。可选地,处理器901还可以读取存储器902中存储的数据,该数据可以与程序904存储在相同的存储地址,该数据也可以与程序904存储在不同的存储地址。
75.处理器901和存储器902可以单独设置,也可以集成在一起,例如,集成在电子设备的系统级芯片(system on chip,soc)上。
76.处理器901执行训练生成对抗网络的方法的具体方式可以参见方法实施例中的相关描述。
77.应理解,上述方法实施例的各步骤可以通过处理器901中的硬件形式的逻辑电路或者软件形式的指令完成。处理器901可以是cpu、数字信号处理器(digital signalprocessor, dsp)、现场可编程门阵列(field programmable gate array,fpga)或者其它可编程逻辑器件,例如,分立门、晶体管逻辑器件或分立硬件组件。
78.本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被计算机执行时实现本技术中任一方法实施例所述的方法。该计算机程序可以是高级语言程序,也可以是可执行目标程序。
79.该计算机可读存储介质例如是存储器902。存储器902可以是易失性存储器或非易失性存储器,或者,存储器902可以同时包括易失性存储器和非易失性存储器。其中,非易失性存储器可以是只读存储器(read
‑
only memory,rom)、可编程只读存储器(programmable rom,prom)、可擦除可编程只读存储器(erasable prom,eprom)、电可擦除可编程只读存储器(electrically eprom,eeprom)或闪存。易失性存储器可以是随机存取存储器(random access memory,ram),其用作外部高速缓存。通过示例性但不是限制性说明,许多形式的 ram可用,例如静态随机存取存储器(static ram,sram)、动态随机存取存储器(dynamicram,dram)、同步动态随机存取存储器(synchronous dram,sdram)、双倍数据速率同步动态随机存取存储器(double data rate sdram,ddr sdram)、增强型同步动态随机存取存储器 (enhanced sdram,esdram)、同步连接动态随机存取存储器(synchlink dram,sldram)和直接内存总线随机存取存储器(directrambus ram, drram)。
80.本领域的技术人员可以清楚地了解到,为了描述的方便和简洁,上述描述的装置和设备的具体工作过程以及产生的技术效果,可以参考前述方法实施例中对应的过程和技术效果,在此不再赘述。
81.在本技术所提供的几个实施例中,所揭露的系统、装置和方法,可以通过其它的方式实现。例如,以上所描述的方法实施例的一些特征可以忽略,或不执行。以上所描述的装置实施例仅仅是示意性的,单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,多个单元或组件可以结合或者可以集成到另一个系统。另外,各单元之间的耦
合或各个组件之间的耦合可以是直接耦合,也可以是间接耦合,上述耦合包括电的、机械的或其它形式的连接。
82.以上所述实施例仅用以说明本技术的技术方案,而非对其限制。尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

