1.本发明涉及驾驶支援系统、驾驶支援程序。
背景技术:
2.以往,已知在地图上显示行驶预定路径的情况下,区分显示行驶预定路径上的自动驾驶区间和非自动驾驶区间(例如,参照专利文献1的0056段)。
3.专利文献1:日本特开2015
‑
141478号公报。
技术实现要素:
4.在车辆从驾驶支援区间向非驾驶支援区间行进的情况下,对于驾驶者而言,期望在驾驶支援控制结束之前有充裕的时间准备驾驶操作。
5.本发明是鉴于上述课题而完成的,其目的在于,提供一种提高在向非驾驶支援区间行进之前驾驶者能够从容准备的可能性的技术。
6.为了达成上述的目的,驾驶支援系统具有:行驶预定路径取得部,取得车辆的行驶预定路径;切换地点取得部,在行驶预定路径中,取得从驾驶支援区间向非驾驶支援区间的切换地点;以及引导控制部,进行如下显示:在行驶预定路径中,从比切换地点靠跟前既定区间的地点开始,引导从驾驶支援区间向非驾驶支援区间的切换。
7.进而,为了达成上述的目的,驾驶支援程序使计算机作为以下各部发挥功能:行驶预定路径取得部,取得车辆的行驶预定路径;切换地点取得部,在行驶预定路径中,取得从驾驶支援区间向非驾驶支援区间的切换地点;以及引导控制部,进行如下显示:在行驶预定路径中,从比切换地点靠跟前既定区间的地点开始,引导从驾驶支援区间向非驾驶支援区间的切换。
8.即,在驾驶支援系统、驾驶支援程序中,进行如下显示:不是从驾驶支援区间向非驾驶支援区间的切换地点,而是进一步从比所述切换地点靠跟前既定区间的地点开始引导向非驾驶支援区间的切换。因此,通过该切换引导,能够提高在实际从驾驶支援区间转移到非驾驶支援区间之前驾驶者能够从容准备的可能性。
附图说明
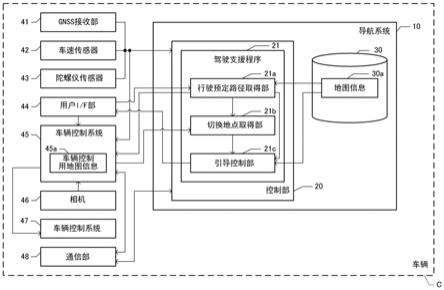
9.图1是表示导航系统的结构的框图。
10.图2a是表示行驶预定路径的一例的图;图2b是表示现有的显示例的图;从图2c至图2f是表示本发明的显示例的图。
11.图3是驾驶支援区间显示处理的流程图。
12.附图标记说明
13.10:导航系统
14.20:控制部
15.21:驾驶支援程序
16.21a:行驶预定路径取得部
17.21b:切换地点取得部
18.21c:引导控制部
19.30:记录介质
20.30a:地图信息
21.41:gnss接收部
22.42:车速传感器
23.43:陀螺仪传感器
24.44:用户i/f部
25.45:车辆控制系统
26.45a:车辆控制用地图信息
27.46:相机
28.47:车辆控制系统
29.48:通信部
30.c:车辆
具体实施方式
31.在这里,按照下述顺序,对本发明的实施方式进行说明。
32.(1)导航系统的结构
33.(2)驾驶支援区间显示处理
34.(3)其他实施方式
35.(1)导航系统的结构:
36.图1是表示本发明的一个实施方式的作为驾驶支援系统而发挥功能的导航系统10的结构的框图。导航系统10设置在车辆c中。车辆c是能够实现由驾驶者进行的手动驾驶以及通过车辆控制系统45的驾驶支援控制进行的驾驶的车辆。根据驾驶者参与驾驶的程度等,将驾驶支援或自动驾驶规定为等级0~5。等级0表示驾驶操作全部由驾驶者进行(即手动驾驶)。在等级1以后,等级越高,驾驶者参与驾驶操作的必要性就越少。
37.通常,等级1、2被称为驾驶支援,等级3、4、5被称为自动驾驶,但在本说明书中,将能够实施既定等级的驾驶支援控制的道路区间称为驾驶支援区间,将不能够实施既定等级的驾驶支援控制的道路区间(参与驾驶操作的必要性比既定等级大的区间)称为非驾驶支援区间。在本说明书中,驾驶支援区间可以是实施自动驾驶控制的区间。另外,在本说明书中,非驾驶支援区间可以是系统协助实施转向操作或加减速的区间。
38.在本实施方式中,设想既定等级为等级3。另外,作为驾驶支援区间,例如设想为高速公路等。因此,在本实施方式中,设想驾驶支援区间中的驾驶支援控制主要是在高速公路的道路区间中的自动驾驶(驾驶操作自动化)。即使行驶在驾驶支援区间中,在驾驶者进行了驾驶操作的情况下,也会根据该驾驶操作来控制车辆c。另外,在本实施方式中,设想在非驾驶支援区间中,驾驶操作的主体是驾驶者(包括完全手动驾驶、以及获得转向、加减速的支持来进行驾驶操作等)。需要说明的是,当然,在其他实施方式中,既定等级不限于等级3,也可以是其他等级,驾驶支援区间不限于高速公路。
39.在地图信息中包含的道路区间中的、能够进行既定等级的驾驶支援控制的道路区间即驾驶支援区间被预先确定,车辆c能够从未图示的服务器取得驾驶支援区间的信息。需要说明的是,当然,驾驶支援区间也可以根据天气或路面状况等而动态地变化。
40.本实施方式中的车辆c具有:gnss接收部41、车速传感器42、陀螺仪传感器43、用户i/f部44、车辆控制系统45、相机46、车辆控制系统47以及通信部48。
41.gnss接收部41是接收全球导航卫星系统(global navigation satellite system)的信号的装置,接收来自导航卫星的电波,并经由未图示的接口输出用于计算车辆的当前位置的信号。控制部20通过取得该信号来取得车辆的当前位置。车速传感器42输出与车辆所具有的车轮的转速相对应的信号。控制部20经由未图示的接口来取得该信号,并取得车速。陀螺仪传感器43检测车辆在水平面内回转的角加速度,并输出与车辆的方向相对应的信号。控制部20通过取得该信号来取得车辆的行进方向。车速传感器42以及陀螺仪传感器43等用于确定车辆的行驶轨迹,在本实施方式中,基于车辆的出发地和行驶轨迹来确定当前位置,并基于gnss接收部41的输出信号来修正该基于出发地和行驶轨迹而确定的车辆的当前位置。
42.用户i/f部44是用于输入使用者的指示并向使用者提供各种信息的接口部,其具有未图示的触摸面板方式的显示器、开关等、扬声器等。即,用户i/f部44包括输出图像或语音的输出部以及接收用户的指示的输入部。
43.通信部48是用于与未示出的服务器进行无线通信的通信电路。在车辆c经由通信部48进行通信的服务器中包括地图服务器。地图服务器是对导航系统10用的地图信息30a和车辆控制系统45的车辆控制用地图信息45a进行管理、更新或发布等的服务器。车辆c通过经由通信部48与地图服务器进行通信,从而能够取得地图信息30a和车辆控制用地图信息45a并进行更新。
44.车辆控制系统45是进行车辆c的驾驶控制的计算机。车辆控制系统45与车辆控制系统47连接。车辆控制系统47是控制转向、加速踏板、制动器等的各种促动器。在车辆控制系统45的未图示的记录介质中,记录有车辆控制用地图信息45a。车辆控制用地图信息45a在车辆控制系统45实施驾驶支援控制时使用。
45.车辆控制用地图信息45a包括道路链(link)对应信息、车道数据、路面喷涂数据、以及驾驶支援可否信息等。道路链对应信息是表示在地图信息30a中定义的道路链与在车辆控制用地图信息45a中处理的道路区间之间的对应关系的信息。车道数据包括表示对应的道路链的车道结构或车道形状的数据。路面喷涂数据包括表示实施了路面喷涂的位置或其内容的数据。
46.驾驶支援可否信息是表示是否为能够实施既定等级的驾驶支援控制的道路区间的信息。更具体来说,驾驶支援可否信息通过由车辆控制用地图信息45a定义的道路区间单位来设定,并记录有表示是否为能够实施既定等级的驾驶支援控制的道路区间的值(例如,如果能够实施则为1,如果不能实施则为0)。车辆控制用地图信息45a中的道路区间的划分有时与地图信息30a中的道路链的端点(即节点)一致,有时也不一致。因此,驾驶支援区间的起点或终点有时与地图信息30a的节点一致,有时也不一致。
47.车辆控制系统45若从导航系统10中取得了行驶预定路径,则基于道路链对应信息,确定与行驶预定路径中包含的道路链对应的、车辆控制用地图信息45a中的道路区间。
车辆控制系统45将已确定的道路区间的驾驶支援可否信息通知给导航系统10。若取得了行驶预定路径中包含的道路区间的驾驶支援可否信息,则如后所述,确定行驶预定路径中的驾驶支援区间和非驾驶支援区间。
48.在车辆c在驾驶支援区间行驶的情况下且驾驶者不进行驾驶操作的情况下,车辆控制系统45基于gnss接收部41、车速传感器42、陀螺仪传感器43、相机46、其他各种传感器(未图示)的输出以及车辆控制用地图信息45a,来控制车辆控制系统47,从而实施车辆c的驾驶支援控制(在本实施方式中为自动驾驶控制)。需要说明的是,即便是车辆c在驾驶支援区间行驶,然而由驾驶者进行了驾驶操作的情况下,车辆控制系统45也根据驾驶者的驾驶操作来控制车辆控制系统47。
49.在车辆c在非驾驶支援区间行驶的情况下,车辆控制系统45主要根据驾驶者的驾驶操作来控制车辆控制系统47,在本实施方式中,根据驾驶者的指示或预先的设定等,进行车间距离维持或车道保持等的控制。若车辆c通过自动驾驶控制在驾驶支援区间行驶并到达了该驾驶支援区间的终点(即从该驾驶支援区间向下一个非驾驶支援区间的切换地点),则自动驾驶控制结束,并且主要根据驾驶者的驾驶操作来控制车辆控制系统47。
50.相机46是用于拍摄车辆c的前方风景图像或后方风景图像的图像传感器。车辆控制系统45通过对由相机46拍摄的车辆c的前方风景图像或后方风景图像进行图像识别处理,从而识别(检测)存在于路面上或道路周围的物体。具体来说,车辆控制系统45在前方风景图像或后方风景图像中识别作为物体的车道划分线、路面喷涂、地标物的影像。然后,车辆控制系统45基于识别到的车道划分线、路面喷涂、地标物的影像在图像内的位置和这些在实际空间内的位置,取得搭载了相机46的车辆c的位置。需要说明的是,能够从车辆控制用地图信息45a中取得车道划分线、路面喷涂、地标物在实际空间内的位置。
51.导航系统10包括具有cpu、ram、rom等的控制部20以及记录介质30。导航系统10能够由控制部20执行存储在记录介质30或rom中的程序。在控制部20所执行的程序中包含驾驶支援程序21。
52.在记录介质30中预先记录有地图信息30a。控制部20能够基于经由通信部48与未图示的地图服务器进行通信而取得的地图信息来更新地图信息30a。地图信息30a是用于路径搜索或路径引导的地图数据。地图信息30a包括:表示设在车辆行驶的道路上的节点的位置等的节点数据;表示用于确定节点之间的道路形状的形状内插点的位置等的形状内插点数据;表示节点之间的连接的道路链数据;以及表示存在于道路上或存在于道路周围的地上物的地上物数据等。在本实施方式中,节点表示交叉路口。在道路链数据中包括表示道路类别、宽度、车道数等的数据。进而,在地上物数据中包括表示设施的名称或类型、设施的位置或形状的数据。
53.控制部20能够执行未图示的导航程序,并能够执行作为导航程序的功能之一的驾驶支援程序21。驾驶支援程序21是通过以能够识别的方式显示行驶预定路径上的驾驶支援区间和非驾驶支援区间从而使驾驶者识别,来实现支援驾驶者的功能的程序。为了实现该功能,驾驶支援程序21具有行驶预定路径取得部21a、切换地点取得部21b、引导控制部21c。
54.行驶预定路径取得部21a是使控制部20实现取得车辆的行驶预定路径的功能的程序模块。即,控制部20通过行驶预定路径取得部21a的功能,经由用户i/f部44的输入部接受使用者输入的目的地,并基于地图信息30a来搜索从车辆的当前位置到目的地的路径,取得
行驶预定路径。
55.切换地点取得部21b是使控制部20实现取得行驶预定路径中的从驾驶支援区间向非驾驶支援区间的切换地点的功能的程序模块。控制部20通过切换地点取得部21b的功能,将行驶预定路径通知给车辆控制系统45,并从车辆控制系统45取得构成行驶预定路径的各道路区间的驾驶支援可否信息。控制部20基于驾驶支援可否信息,取得行驶预定路径中的驾驶支援区间的起点以及终点的位置。需要说明的是,例如,在连续的多个道路区间能够实施既定等级的驾驶支援控制的情况下,控制部20将由该连续的多个道路区间构成的区间视为一个驾驶支援区间。控制部20将驾驶支援区间的终点视为从该驾驶支援区间向下一个非驾驶支援区间的切换地点。需要说明的是,控制部20将驾驶支援区间的起点视为从前一个非驾驶支援区间向该驾驶支援区间的切换地点。
56.图2a~图2c是表示行驶预定路径的一例的图。在图中示出了行驶预定路径或其周围的道路链的连接关系。在该例子中,驾驶支援区间的起点或终点与地图信息30a的节点一致。在图中,黑圆圈表示节点,连接节点与节点的线段表示道路链。另外,由实线所示的线段表示该道路链为驾驶支援区间,由虚线所示的线段表示该道路链为非驾驶支援区间。在图2a~图2c中,灰色的粗线表示行驶预定路径。即,在图2a~图2c所示的行驶预定路径中,道路链l2、l3、l4为驾驶支援区间,道路链l0、l1、l5为非驾驶支援区间。例如可以设想道路链l2、l3是高速公路的干线,道路链l0、l5是一般公路,道路链l1、l4是坡道。需要说明的是,在图2a~图2c的例子中,行驶预定路径的行驶顺序为l0、l1、l2、l3、l4、l5的顺序。控制部20按照行驶顺序沿行驶预定路径的道路链前行,并基于驾驶支援可否信息,取得从驾驶支援区间向非驾驶支援区间的切换地点即节点n2。另外,控制部20也取得从非驾驶支援区间向驾驶支援区间的切换地点即节点n1。
57.以往,在将包含行驶预定路径的地图显示在用户i/f部44的触摸面板显示器上的情况下,一般通过改变显示颜色等,从而以能够识别的方式呈现行驶预定路径以外的道路和行驶预定路径的道路。进而,以往,已知通过改变显示方式,从而以能够识别的方式呈现行驶预定路径上的驾驶支援区间和非驾驶支援区间。图2b表示在行驶预定路径上的驾驶支援区间上叠加显示浅灰色的粗线,在行驶预定路径上的非驾驶支援区间上叠加显示深灰色的粗线的例子。如图2b所示,以往,在地图上直接表现驾驶支援区间与非驾驶支援区间的切换地点。在本实施方式中,采用如下结构:将从驾驶支援区间向非驾驶支援区间的切换地点移向了既定区间的跟前的地点作为表面上的(apparent)切换地点(表示驾驶支援区间终点的结束通知地点),并以能够识别的方式显示行驶预定路径上的驾驶支援区间和非驾驶支援区间。
58.引导控制部21c使控制部20实现进行如下显示的功能:在行进预定路径中,从比切换地点靠跟前既定区间的地点开始,引导从驾驶支援区间向非驾驶支援区间的切换。控制部20取得比从驾驶支援区间向非驾驶支援区间的切换地点靠跟前既定区间的地点。在本实施方式中,控制部20将设想在通过从驾驶支援区间向非驾驶支援区间的切换地点的n秒(例如n=4或者5)之前车辆c所通过的地点作为既定区间的跟前的地点(结束通知地点)而取得。因此,既定区间的区间长度根据驾驶支援区间的假定车速而发生改变。即,既定区间的区间长度被设定为驾驶支援区间的假定车速越大则越长。驾驶支援区间的假定车速例如可以基于与该区间或该区间前后的区间相对应的法定速度来设定。另外,也可以基于驾驶支
援区间中的道路的拥挤度或实际的车辆的平均速度来设定。法定速度例如被包含在地图信息30a的道路链数据中。道路的拥挤度或平均速度可以采用从交通信息服务器取得的结构。交通信息服务器例如也可以基于从路边机(road side unit)、探测车辆收集到的数据来计算拥挤度或平均车速。
59.控制部20将比从驾驶支援区间向非驾驶支援区间的切换地点靠跟前既定区间的地点设为从驾驶支援区间向非驾驶支援区间的表面上的切换地点(驾驶支援区间的结束通知地点)。需要说明的是,在本实施方式中,控制部20不移动从非驾驶支援区间向驾驶支援区间的切换地点(驾驶支援区间的起点)的表面上的位置。
60.图2c的地点p表示设定从驾驶支援区间向非驾驶支援区间的表面上的切换地点的例子。地点p(结束通知地点)是比从驾驶支援区间向非驾驶支援区间的实际的切换地点即节点n2靠跟前既定区间的地点。控制部20并不是将实际的驾驶支援区间即节点n1到节点n2的区间,而是将从节点n1到地点p为止的区间设为表面上的驾驶支援区间,并通过表示驾驶支援区间的显示方式的线来显示该区间。需要说明的是,表示道路链的实线/虚线、表示节点的黑圆圈、表示结束通知地点的白圆圈是为了容易理解而图示的,可以不显示在地图上。
61.另外,控制器20将从地点p到节点n2的区间设为表面上的非驾驶支援区间,对于该区间,与节点n2以后的非驾驶支援区间同样地显示表示非驾驶支援区间的显示方式的线。另外,控制部20对于比实际的驾驶支援区间的起点即节点n1更靠前的非驾驶支援区间,显示表示非驾驶支援区间的显示方式的线。
62.如上所述,在本实施方式中,进行行驶预定路径中的驾驶支援区间的引导显示,使得驾驶支援区间看起来在比从驾驶支援区间向非驾驶支援区间的实际切换地点靠跟前既定区间的地点处(结束通知地点)结束。因此,在从驾驶支援区间向非驾驶支援区间的实际切换地点之前,容易从容地实施向非驾驶支援区间的驾驶操作的准备。因此,根据本实施方式,能够提高驾驶者能够从容地准备结束驾驶支援控制(在本实施方式中为自动驾驶)的可能性。
63.如上述那样的行驶预定路径中的驾驶支援区间和非驾驶支援区间的引导可以在搜索到目的地为止的路径后且在开始行驶前显示行驶预定路径的整体(显示所有路线)时进行,也可以在确定行驶预定路径后且实际行驶在行驶预定路径上并显示车辆c的当前位置周围的地图时进行。
64.需要说明的是,在图2a~图2c中,虽然示出了坡道与一般公路的连接地点即节点n2为从驾驶支援区间向非驾驶支援区间的切换地点的例子,但从驾驶支援区间向非驾驶支援区间的切换地点并不一定与地图信息30a中的节点一致。图2d示出了在高速公路的干线上存在从驾驶支援区间向非驾驶支援区间的切换地点的例子。在图2d中,虚线表示高速公路中的非驾驶支援区间,实线表示高速公路中的驾驶支援区间,黑圆圈表示从驾驶支援区间向非驾驶支援区间的实际切换地点q1。这样,即使在高速公路的干线上存在从驾驶支援区间向非驾驶支援区间的切换地点q1的情况下,也能够根据高速公路的干线的假定车速来设定既定区间的长度,并显示为非驾驶支援区间看起来在从比地点q1靠跟前既定区间的地点q2处开始(驾驶支援区间结束)。在图2d的例子的情况下,由于既定区间在高速公路上,因此假定车速也可能比如图2c的例子那样既定区间位于坡道的情况更大。因此,在本实施方式中,能够设定既定区间q2‑
q1的区间长度比图2c的p
‑
n2的区间长度更长。
65.(2)驾驶支援区间显示处理:
66.接下来,参考图3来说明控制部20所执行的驾驶支援区间显示处理。驾驶支援区间显示处理是在用户i/f部44的触摸面板显示器上显示包含行驶预定路径的地图的处理,并且是以能够识别的方式显示行驶预定路径上的驾驶支援区间和非驾驶支援区间的处理。设想图3所示的驾驶支援区间显示处理是在车辆c的乘客经由用户i/f部44输入目的地并指示了路径搜索的情况下执行。
67.当开始驾驶支援区间显示处理时,控制部20通过行驶预定路径取得部21a的功能,取得行驶预定路径(步骤s100)。即,基于gnss接收部41、车速传感器42、陀螺仪传感器43的输出信号来取得车辆c的当前位置。然后,控制部20参照地图信息30a,搜索用于从当前位置出发且到达目的地的路径,并取得该路径作为行驶预定路径。
68.接下来,控制部20通过切换地点取得部21b的功能,取得表示驾驶支援区间的信息(步骤s105)。即,控制部20将在步骤s100取得的行驶预定路径通知给车辆控制系统45,并从车辆控制系统45取得构成行驶预定路径的各道路区间的驾驶支援可否信息。
69.接下来,控制部20通过切换地点取得部21b的功能,取得从自动驾驶向手动驾驶的切换地点(步骤s110)。控制部20基于在步骤s105取得的表示驾驶支援区间的信息(驾驶支援可否信息),来确定行驶预定路径中包含的驾驶支援区间的起点以及终点的位置。控制部20取得驾驶支援区间的终点作为从驾驶支援区间向非驾驶支援区间的切换地点。需要说明的是,在行驶预定路径中存在分离的多个驾驶支援区间的情况下,针对所有驾驶支援区间取得终点(向非驾驶支援区间的切换地点)。
70.接下来,控制部20通过引导控制部21c的功能,设定将切换地点移向了既定区间的跟前的地点(结束通知地点)(步骤s115)。即,控制部20取得以切换地点为终点的驾驶支援区间的假定车速。控制部20基于假定车速和作为延迟时间的n秒来计算距离(既定区间的区间长度)。控制部20将从切换地点开始在行进预定路径上追溯该距离后的地点设定为结束通知地点。
71.接下来,控制部20通过引导控制部21c的功能,判定是否针对所有的切换地点已设定结束通知地点(步骤s120),在没有判定为已设定的情况下返回到步骤s115。在步骤s120中判定为已设定的情况下,控制部20通过引导控制部21c的功能,基于结束通知地点来显示行驶预定路径(步骤s125)。即,在本实施方式中,控制部20确定行驶预定路径的整体处于显示器的地图显示区域中的比例尺,并通过上述的比例尺在ram的地图显示区域中描绘包含行驶预定路径的整体的范围的地图。控制器20针对从驾驶支援区间的实际起点到结束通知地点的区间,描绘表示驾驶支援区间的显示方式的线,以使其与描绘在ram上的行进预定路径重叠。针对行驶预定路径中的驾驶支援区间以外的区间,控制部20描绘表示非驾驶支援区间的显示方式的线。控制部20基于描绘在ram的地图显示区域上的数据,使用户i/f部44的触摸面板显示器显示地图。
72.需要说明的是,在由步骤s100取得的行驶预定路径中不包含驾驶支援区间的情况下,控制部20用表示非驾驶支援区间的显示方式的线来显示行驶预定路径的所有区间。
73.(3)其他实施方式:
74.以上的实施方式是用于实施本发明的一例,也能够采用其它各种实施方式。例如,构成驾驶支援系统的行驶预定路径取得部21a、切换地点取得部21b以及引导控制部21c中
的至少一部分也可以分开地存在于多个装置中。例如,行驶预定路径取得部21a的功能的一部分也可以由服务器实现。切换地点取得部21b的功能或引导控制部21c的一部分也可以由车辆控制系统45实现。当然,也可以省略上述实施方式的一部分结构,或者也可以改变或省略处理顺序。
75.行驶预定路径取得部只要能够取得车辆的行驶预定路径即可,行驶预定路径只要是车辆行驶的可能性比其他道路高的路径即可。例如,行进预定路径可以是车辆能够从当前位置沿道路行驶的路径,也可以是连接到使用者所设定的目的地的路径。行驶预定路径也可以是通过已知的路径搜索方法搜索到的最佳路径。行驶预定路径可以是搭载于车辆的导航系统所设定的路径,也可以是能够与车辆通信的服务器所设定的路径。
76.切换地点取得部只要能够在行进预定路径中取得从驾驶支援区间向非驾驶支援区间的切换地点即可。表示驾驶支援区间的信息,只要能够确定驾驶支援区间的起点或终点、非驾驶支援区间的起点或终点,则可以是任何数据结构。在上述实施方式中,虽然是参照车辆控制用地图信息45a取得表示驾驶支援区间的信息的结构,但并不限定于此。地图信息30a和车辆控制用地图信息45a也可以在车辆c中被合并。表示驾驶支援区间的信息也可以是在每当进行路径搜索或路径指引时从服务器取得的结构。
77.驾驶支援区间只要是能够实施既定等级的驾驶支援控制的道路区间即可。另外,非驾驶支援区间只要是不能实施既定等级的驾驶支援控制的道路区间即可。对于能够在驾驶支援区间实施的驾驶支援控制,能够进行各种设想。另外,也能够对非驾驶支援区间中的控制的方式进行各种设想。除了上述的实施方式以外,例如也可以设想在驾驶支援区间进行等级3、4的控制,在非驾驶支援区间进行等级0即完全手动驾驶的控制。另外,例如,也可以设想在驾驶支援区间进行等级1以上的控制,在非驾驶支援区间进行等级0即完全手动驾驶的控制。
78.驾驶支援控制可以是进行支援车辆的加速或减速的控制,也可以是进行支援操纵车辆的控制。驾驶支援控制也可以基于搭载于车辆的各种传感器的检测信息来进行。各种传感器可以是图像传感器、雷达或声波传感器。
79.引导控制部只要能够进行在行驶预定路径中从比切换地点靠跟前既定区间的地点开始,引导从驾驶支援区间向非驾驶支援区间的切换的显示即可。即,如上述的实施方式那样,可以采用以比实际切换地点靠跟前既定区间的地点为驾驶支援区间的结束地点的方式进行引导的结构,也可以采用以既定区间为从驾驶支援区间向非驾驶支援区间的转移准备区间的方式进行引导的结构。
80.即,引导控制部也可以采用进行与既定区间对应地引导切换的显示的结构。例如,如图2e以及图2f所示,也可以以能够识别的方式显示实际的驾驶支援区间中的既定区间(从地点q2到q1的区间)、实际的驾驶支援区间中的非既定区间(比地点q2更靠前的区间)、以及实际的非驾驶支援区间(地点q1以后的区间)。更具体来说,例如,如图2e所示,可以使实际的驾驶支援区间内的既定区间(从地点q2到q1的区间)从表示驾驶支援区间的显示颜色向表示非驾驶支援区间的显示颜色阶段性地变化(渐变)的方式进行显示。另外,例如,如图2f所示,可以用表示驾驶支援区间的显示颜色与表示非驾驶支援区间的显示颜色的中间颜色来显示实际的驾驶支援区间内的既定区间(从地点q2到q1的区间)。这样,通过以能够识别的方式来显示既定区间,从而能够以既定区间为从驾驶支援区间向非驾驶支援区间的转移准
备区间的方式引导。另外,例如通过如图2f那样的方式显示,也能够使驾驶者识别出从驾驶支援区间向非驾驶支援区间的实际切换地点。
81.需要说明的是,在引导控制部中,可以通过各种方法设定既定区间的区间长度。例如,在引导控制部中,也可以采用根据驾驶支援区间的道路类别来设定既定区间的区间长度的结构。例如,如果驾驶支援区间是表示规模为第一规模的类别的道路,则可以将区间长度设定为比表示规模为第二规模(<第一规模)的类别的道路的情况下更长。根据该结构,在根据驾驶支援区间的规模而设定的区间长度的既定区间中,能够提高驾驶者能够从容准备的可能性。
82.另外,在引导控制部中,也可以采用根据驾驶支援区间的交通信息来设定既定区间的区间长度的结构。交通信息例如可以设想为交通阻塞度、速度限制、车道限制等。例如,在表示驾驶支援区间的假定车速有可能下降的情况下,也可以将区间长度设定为比其他情况下更短。根据该结构,在根据驾驶支援区间的交通信息而设定的区间长度的既定区间中,能够提高驾驶者能够从容准备的可能性。
83.另外,在引导控制部中,也可以采用既定区间的区间长度被设定为驾驶支援区间的区间长度越长则越长的结构。在驾驶支援区间例如是进行等级3的自动驾驶控制的区间的情况下,在驾驶支援区间中,驾驶者基本不需要进行驾驶操作。因此,认为驾驶支援区间的长度越长,驾驶者就越习惯于自动驾驶的状态,且准备就越晚(驾驶者进入能够实施驾驶操作的状态为止的准备时间需要更长)。因此,通过将既定区间的长度设定为随着驾驶支援区间的区间长度越长而越长,从而能够提高驾驶者根据驾驶者的状况从容准备的可能性。
84.另外,在引导控制部中,也可以采用既定区间的区间长度被设定为非驾驶支援区间的驾驶操作的难度越大则越长的结构。作为难度大的例子,能列举出道路弯曲、驾驶支援区间与非驾驶支援区间的假定车速之差大等。作为难度不大的例子,例如能列举出直行道路、速度差小等。在驾驶支援区间之后的非驾驶支援区间的驾驶操作的难度大的情况下,通过将既定区间的区间长度设定为比难度不大的情况下更长,从而能够提高驾驶者能够从容准备的可能性。
85.在引导控制部中,也可以采用既定区间的区间长度被设定为车辆的驾驶者的驾驶熟练度越低则越长的结构。认为在驾驶者的驾驶熟练度低的情况下,与不低的情况相比,期望准备驾驶操作的时间越长越好,并且认为如果是驾驶熟练度高的驾驶者,则不需要准备那么长的时间。因此,通过根据驾驶熟练度可变地设定既定区间的区间长度,从而能够设定与驾驶者的状况相对应的准备时间。需要说明的是,驾驶者的驾驶熟练度例如可以通过车辆的总行驶距离来判定,也可以通过驾驶者的认证和每个驾驶者的行驶历史(总行驶距离、总驾驶时间、驾驶频率、车辆的移动范围的大小、每个道路类别的驾驶频率等)来判定。
86.在引导控制部中,也可以采用既定区间的区间长度被设定为车辆过去在驾驶支援区间及非驾驶支援区间行驶过的行驶次数越少则越长的结构。如果过去行驶的次数多,则认为已经习惯了驾驶支援区间之后的下一个非驾驶支援区间的驾驶操作,如果次数少,则认为还没有习惯。因此,通过将既定区间的长度设定为过去行驶过的行驶次数越少则越长,从而能够设定与驾驶者的状况相对应的准备时间。
87.在引导控制部中,也可以采用既定区间的区间长度被设定为,在包含切换地点的地区的天气为暴风雨的情况下,比不是暴风雨的情况下更长的结构。如果是暴风雨天气,则
在非驾驶支援区间驾驶时需要注意的可能性较高。因此,通过将既定区间的区间长度设定为在包含切换地点的地区的天气为暴风雨的情况下比不是暴风雨的情况下更长,从而能够设置与天气相对应的准备期间。
88.进而,如本发明那样,从比从行驶预定路径上的驾驶支援区间向非驾驶支援区间的切换地点更靠近既定区间的地点开始进行引导切换的显示的方法,也可以作为程序或方法来应用。另外,上述那样的系统、程序、方法有时作为单独的装置来实现,有时也利用与车辆所具备的各部共享的部件来实现,包括各种方式。另外,能够适当地进行变更,例如一部分为软件且一部分为硬件等。进而,即使作为控制系统的程序的记录介质,本发明也成立。当然,该程序的记录介质可以是磁记录介质,也可以是半导体存储器,在今后开发的任何记录介质中也都可以完全相同地考虑。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

