1.本发明属于智能交通领域,具体涉及一种基于视觉分析的露天停车场推荐系统。
背景技术:
2.由于交通技术的迅速发展,汽车成为不少人优选的代步工具,在大城市里汽车更是成为必不可缺的交通工具。但日益增加的车辆也造成了停车场内一系列问题的涌现,例如:停车场内车位的紧缺、大规模停车场内空闲车位寻找的不便、停车场收费时的排队问题。尽管现今各类大型停车场内有人员指导车辆寻找相应车位,但在车流量较大的情况之下,此类方式会浪费大量人力并消耗不必要的时间。除此之外,驾驶者在寻找停车场以及车位的场景下还基本存在以下的问题:
3.1)到达目的地时,未知附近停车场是否有空闲车位,当驾驶人开车到停车场时可能出现停车场没有空闲车位的情况;
4.2)驾驶人进入停车场后需要花费大量的时间去寻找空闲的车位,即使找到了空闲的车位有可能出现车位大小与车型不匹配的问题,导致停车后下车不便;
5.3)当车流量较大时,可能会出现多位车主车位争抢拥堵的问题;
6.4)由于部分大型停车场入口较多,驾驶者在停车之后很难再次找到自己车辆的停放位置;
7.5)在离开停车场交停车费排队的过程中,排队队伍过于冗长耗费时间;
8.因此,帮助顾客和车辆在最短的时间内找到合适的停车场和停车位,避免车辆找不到停车场,进场后找不到车位,甚至相互争抢车位,造成拥堵变成了亟待解决的问题。
技术实现要素:
9.本发明的目的是提供一种基于视觉分析的露天停车场推荐系统,帮助顾客和车辆在最短的时间内找到合适的停车场和停车位,解决了车辆找不到停车位,进场后找不到车位造成拥堵的问题。
10.为实现上述目的,本发明提供了如下方案:一种基于视觉分析的露天停车场推荐系统,其特征在于:包括无人机模块、云平台数据存储模块、停车场相机采集模块和智能终端模块;
11.所述无人机模块用于实时检测停车场及夜晚照明;
12.所述云平台数据存储模块用于停车场车辆的进出时间、停车费用、停车场内停车数量和闲置的车位信息的存储和读取;
13.所述停车场相机采集模块用于车位精准推荐;
14.所述智能终端模块用于实现路线规划、整套模块的界面可视化、自动收取停车费以及回寻车位;
15.所述无人机模块用于检测停车场内的车位信息并将所述车位信息传送给所述智能终端模块,所述智能终端模块接收到停车场相机采集模块发送的车位推荐信息,驾驶人
通过智能终端模块请求云平台数据存储模块找到车位,车辆离开智能终端接收到无人机发送的停车时间戳信息,自动收取停车费。
16.优选地,所述无人机模块包括若干个无人机,所述无人机包括摄像头模块、实时监测模块、夜晚照明模块、数据收发模块与智能终端交互部分。
17.优选地,所述实时检测模块包括:通过opencv中边缘检测方式及深度学习中cnn模型训练方法对停车场内部车辆和空闲车位数量进行识别统计。
18.优选地,所述opencv中边缘检测方式获取整个停车场的边缘图像,再结合hough变换来检测出停车场内所有能够识别的直线,识别出停车场位置。
19.优选地,所述夜晚照明模块过程为:基于所述摄像头模块,通过所述无人机对车位进行照明,其他巡检的所述无人机进行传送视频流处理。
20.优选地,所述摄像头模块包括单摄像头和双摄像头,白天采用所述单摄像头采集视频流,夜晚采用所述双摄像头采集黑白图像,对图像进行图片融合处理。
21.优选地,所述车位推荐过程包括停车场内在停车位点等距离间隔放置相机,通过全景分割算法计算出停车位中所停放车辆的车间距,利用车间距计算出空闲车位所能停放车辆的最大车型,将推荐结果发送所述智能终端模块,进行所述车位推荐处理。
22.优选地,所述路线规划过程为:首先通过所述智能终端模块获取整个停车场的路线图,将所述路线图抽象为一张节点图,在图上标注出车辆能够通行的路径,能够找到到达目的节点的最短路径。
23.优选地,所述回寻车位过程为:驾驶人通过所述智能终端模块在云平台数据存储模块上找到车辆位置数据,调用所述智能终端模块进行路线规划寻找到对应的停车位。
24.优选地,所述自动收取停车费过程为:所述无人机模块记录车辆进入和离开停车场,将时间信息发送给智能终端模块存储的云平台数据存储模块,智能终端模块计算出停车费,自动扣除停车费,并将费用信息存储到云平台数据存储模块。
25.本发明公开了以下技术效果:
26.本发明能够实时监测停车场情况,尽快做出所需车辆的车位选择并规划好路线,方便驾驶人停车和寻车,避免了车位与车型不匹配难以下车以及费事费力争抢车位造成拥堵的问题,实现了车位的精准推荐,还能够进行自动扣费从而减少排队过于冗长耗费时间的问题。
附图说明
27.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
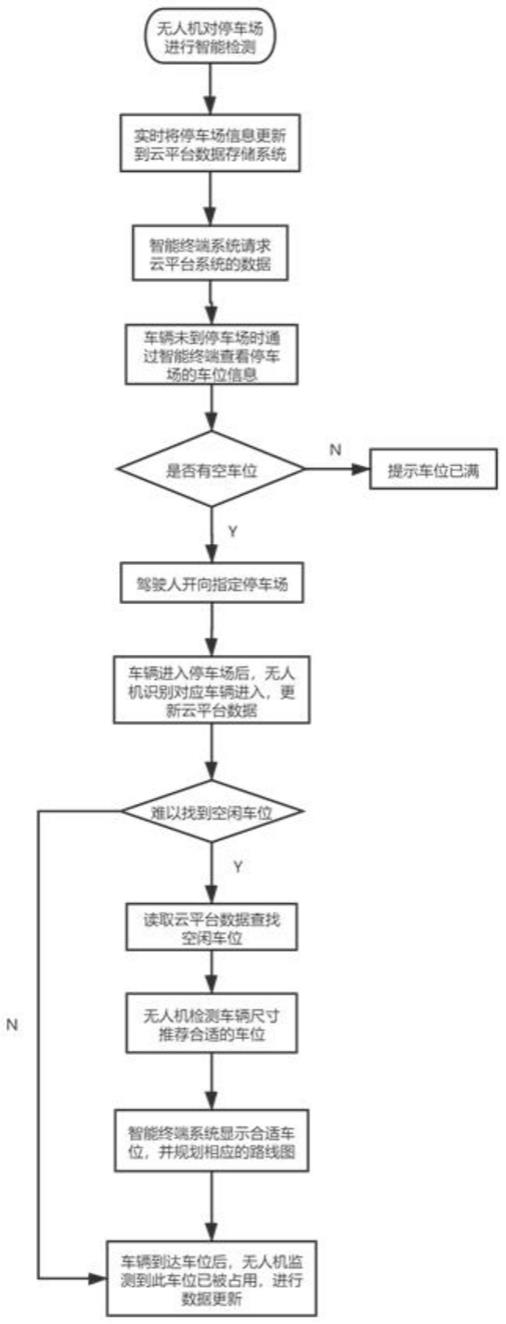
28.图1为本发明实现实时监测以及车位智能推荐的流程示意图;
29.图2为本发明自动收费模块的流程示意图;
30.图3为本发明回寻车位模块的流程示意图;
31.图4为本发明无人机模块,智能终端模块以及云平台存储模块的交互关系示意图;
32.图5为本发明无人机夜晚所采用的双摄像头模块处理图像的流程示意图。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
35.本发明设计了一种基于视觉分析的停车场推荐系统。当驾驶人到达目的地未找到合适的停车场时,智能终端模块会显示相应的停车场信息,其中包括停车场内的车辆数量,空闲的车位数量等,并为停车场进行路线规划;当车辆进入停车场后,停车场内的相机采集模块通过全景分割的方式获取停车位内的车间距并计算出此间距所适合的车型大小,推荐出合适的空闲车位;当驾驶者再次进入停车场找寻自己的车辆时,可通过手机的智能终端模块来找寻车辆位置,大大减少了找寻车辆所需耗费的时间;当驾驶人离开停车场后智能终端模块可以实现自动收费,有效避免了因停车收费排队造成的时间消耗;当驾驶人夜晚进入停车场时,停车场内的无人机可以就近为车辆所需要的停车位进行灯光引导处理。
36.本发明主要基于无人机模块,云平台数据存储模块、停车场相机采集模块以及智能终端模块对停车场进行智能管理。无人机模块由双摄像头模块、夜晚照明模块、数据的收发模块、实时监测模块以及智能终端交互模块组成;智能终端模块由收费模块、路线规划模块、收发数据模块、回寻车辆模块以及无人机交互模块组成;停车场相机采集模块由摄像头以及摄像头支架组成;云平台数据存储模块则由数据库组成实现读取以及写入数据的功能。
37.无人机模块可实时监测停车场的情况,停车场内由多个巡检的无人机组成,通过边缘检测及cnn模型训练的方式对停车场内部车辆,空闲车位进行识别。每当车辆进入停车场,驶出停车场,进入停车位,驶出停车位无人机都进行识别并将相应的信息发送给智能终端模块及云平台数据存储模块。到夜晚时,无人机在所需时对车位进行照明处理,引导相应的车辆快速找到正确的车位。每个停车场内布置两架无人机,实现双巡检模式,以保证夜晚照明模块的运作并避免无人机供电量不足的问题。同时,无人机模块内包含双摄像头模块可保证夜晚采集视频流的高清晰度,使得所采集的视频流不会因夜晚曝光不足造成的图片质量损失而影响后续的边缘检测模块处理。
38.云平台存储模块主要用来实现停车场信息的存储功能,通过无人机模块与智能终端模块对云平台数据存储模块的数据写入,将每日停车场内的一系列信息,包括车辆的进出时间、停车费用、停车场内停车数量和闲置的车位信息进行存储。此类存储信息可供今后调取查看,方便无人机和智能终端模块对数据的读取,实现数据共享化。
39.停车场相机采集模块主要用来实现车位精准推荐功能,停车场内在停车位点每隔10米放置相机,相机角度倾斜向下对准停车位,再通过全景分割算法计算出停车位中所停放车辆的车间距,通过车间距计算出空闲车位所能停放车辆的最大车型,将此推荐结果发送到智能终端做出相应车位推荐处理。
40.智能终端模块可实现路线规划、整套模块的界面可视化、收取停车费以及回寻停车位的功能。当驾驶人找寻停车场或车位时智能终端可以请求获取云平台中的停车位数量
以及位置,并进行路线的规划;当驾驶人回到停车场寻找停车位置时可直接通过智能终端获取云平台中车位信息,并进行路线规划;在收取费用方面,当车辆离开停车场时,智能终端接收到无人机发送的停车时间戳信息,进行自动收费处理。
41.无人机实时检测模块,通过opencv中边缘检测方式及深度学习中cnn模型训练方法对停车场内部车辆和空闲车位数量进行识别统计。opencv中的canny边缘检测方式来获取整个停车场的边缘图像,再通过hough变换来检测出停车场内所有可识别的直线,此类方式可有效识别出停车场位置。具体通过以下步骤进行实现:
42.(1)首先无人机摄像头获取停车场的视频信息,对每帧图像进行基本的去除背景、转换灰度图、去噪处理;
43.(2)对于图像进行边缘检测,得到停车场每一个空闲停车位的位置信息。这些位置信息将被存储到云平台,无需每次都对这些信息再次检测和获取;
44.(3)利用无人机采集停车场内车位被占用和空闲两种情况的图像,并对其进行模型训练,以此构建出cnn方便后续对空闲车位的检测和识别;
45.(4)当无人机需要实时检测停车场信息时,引入训练好的模型,对图片进行检测,可有效地识别出空车位的位置以及数量。
46.无人机夜晚照明模块于秋冬季从晚上5点半开始,春夏季从晚上6点半开始,无人机开启照亮模块。当车辆夜晚选择车位通过智能终端模块进行路线规划时,无人机对此车位进行照明,方便驾驶人的停车操作。当无人机需要进行照明时,离照明车位最近的无人机自动打开照明模块,同时为避免照明模块对于无人机摄像头拍摄的曝光度的影响,此无人机摄像头暂不启动,由其他巡检的无人机进行传送视频流处理。
47.无人机模块中双摄像头模块其摄像头分辨率均大于1920*1080,帧率大于45fps,具有光学防抖、背景补偿等功能。在白天时,无人机采取单摄像头工作的方式对视频流进行采集。在夜晚时,无人机采取双摄像头工作方式,利用两个摄像头所得到的不同的曝光和色彩信息的图像进行图片融合处理,对夜晚光照补偿较弱的停车场实现拍照增强的功能。双摄像头间距设置在1cm左右,夜晚使用的摄像头采集黑白图像,可保证更大的进光量,图像细节会更明显。在此双摄像头模块中采用的图像融合方式,其实现方式如下:
48.(1)在获取双摄像头的视频流后对其进行分帧处理,对原图像每一像素上的像素点进行统计,得到的像素图i
n
为从双摄像头所读取到的图像信息。通过i
n
使用滤波算子z进行均值滤波处理,得到基层图像(base layer)b
n
:b
n
=i
n*z
;当n=1时,则b1=i
1*z
;当n=2时,则b2=i
2*z
;
49.(2)用像素图i
n
的像素点减去对应基层图像b
n
的像素点可以得到细节层(detail layer)d
n
:d
n
=i
n
‑
b
n
;当n=1时,则d1=i1‑
b1;当n=2时,则d2=i2‑
b2;
50.(3)将像素图i
n
进行拉普拉斯滤波,得到高频分布图像素图s
n
。当n=1和n=2时,高频分布图像素图分别为s1和s2,将s1和s2之间的像素进行比较,即将两幅图像中像素点进行对比,提取出每一像素上的较大像素点,重新统计构建图像得到图像s
‑
max。将s
‑
max与高频分布图像素图s
n
比较得到权重分布图p
n
,权重分布图中的像素只有0和1两种值:
[0051][0052]
(4)将输入的图片作为引导图,对p进行导向滤波;
[0053][0054]
其中,实验中参数设置r1=45,e1=0.3,r2=7,e2=10^
‑
6,使用该参数进行导向滤波可以得到和为基层in的权重值,为细节层dn的权重值;
[0055]
(5)利用导向滤波的结果对base layer和detail layer进行重建,得到重建后的像素图和
[0056][0057]
(6)将重建的图片和中对应位置的像素点相加,融合为最终输出的图像该输出图像即为双摄像头的两幅图像在融合后的结果。
[0058]
停车场内相机采集模块中的全景分割算法可实现视频流中图像背景与物体的分离,有效地识别出停车位上的车间距进而进行更为精准的车位推荐。此方式使用panoptic fpn为基于mask r
‑
cnn和fpn的网络架构,可以有效地对语义和实例进行分割,同时兼具稳健性和准确性。在语义分割上,从fpn的最深层开始,每层上采样为原始图像1/4分辨率的特征图,每个上采样包含3
×
3的卷积层,一个relu和一个两倍双线性内插上采样,最终接一个1
×
1的卷积核一个四倍双线性内插上采样恢复到原来的尺寸。实力分割通过fpn之后r
‑
nn在不同的金字塔层级分别实现rol池化,再增加一个网络分支为每个实例预测区域得到边界框的位置。
[0059]
智能终端模块中的路线规划模块,智能终端首先获取整个停车场的路线图,将其抽象为一张节点图,在图上标注出车辆可走的路径。当驾驶人选取一个目的位置时,通过dijkstra算法来找到到达目的节点的最短路径。
[0060]
智能终端模块中的回寻车位模块,驾驶人回到停车场找寻所属的车辆时,手机上的智能终端在云平台中寻找相应的位置数据,并进行路线规划寻找对应的停车位。
[0061]
如图1所示,无人机的实时监测功能主要分为以下几个步骤:
[0062]
(1)首先无人机需要定位到合适的高度,使其可监测到停车场的全场布局;
[0063]
(2)在停车场内没有任何车辆的情况下,利用边缘监测的方法监测停车场内所有车位的位置信息,并将此数据存储到云平台数据存储模块中,之后此信息不需要再做任何更新;
[0064]
(3)利用无人机得到停车位上被占用和空闲时期的图像,对其进行模型训练,使用训练好的模型对车位的占用情况进行实时检测;
[0065]
(4)利用目标检测的方式得到停车场内所有的车辆信息;
[0066]
(5)将步骤3和步骤4得到的停车场数据存储到云平台数据存储模块中,当驾驶者需要了解停车场内的情况时,智能终端直接向云平台请求相关的信息并进行可视化展示;
[0067]
如图1中所展示的驾驶者寻找停车场以及停车位时其操作步骤如下:
[0068]
(1)当驾驶者寻找所需的停车场时,智能终端请求云平台数据模块获取相关的停车场数据信息,向驾驶者显示停车场中现有的车辆情况以及剩余的空闲车位情况,以供驾驶者选择合适的停车场;
[0069]
(2)当驾驶者选择相关停车场之后,智能终端模块立即规划相关的线路引导驾驶
者到达选定的停车场。驾驶者进入停车场后,智能终端接收并识别无人机模块发送的入场时间信息并通过可视化界面显示驾驶者此消息;
[0070]
(3)当驾驶者在停车场难以找到空闲车位时,可以通过智能终端来查看停车场内的空闲车位的信息,同时停车场内的相机采集模块会通过全景分割的方式获取停车位上车间距,给对应的车辆推荐合适的车位并发送信息给智能终端模块。终端模块显示出相应的推荐车位供驾驶者选择,在驾驶者选择相应的车位之后,终端模块规划出合适的路线引导驾驶者驶向车位;
[0071]
(4)当车辆进入车位之后,无人机识别出此车位已被占用并发送消息给对应的终端模块并将此车辆占用车位的信息情况存储到云平台数据模块,智能终端模块可视化地显示出停车位的位置;
[0072]
如图2所示,停车场的停车收费方面的实施步骤如下:
[0073]
(1)车辆进入停车场的时间点为计时起点,无人机检测到车辆的进入与车辆中对应的终端模块建立联系,并将车辆进入停车场的时间存储到云平台模块;
[0074]
(2)当车辆离开停车场时,无人机检测确定该车辆正在离开停车场,当车辆完全离开停车场后,便将离开停车场对应的时间信息发送给对应的智能终端并存储到云平台数据库中。
[0075]
(3)智能终端模块通过进入停车场的时间以及离开停车场的时间计算出相应的费用,自动进行扣费处理,并将费用信息存储到云平台模块中;
[0076]
在步骤1中无人机对于车辆进入的检测以车辆的进入停车场面积作为判断的依据,当车辆进入停车场的面积由0%增大到90%以上便判定车辆进入停车场,发送相关时间戳给云平台模块。同理,当车辆离开停车场时,无人机检测出车辆的面积正在减少,当车辆面积减小到10%以下时判定车辆离开停车场,发送数据给智能终端模块以及云平台数据存储模块。
[0077]
如图3所示,智能终端模块中的回寻车位功能其实施步骤如下:
[0078]
(1)当车辆停车之后,无人机检测到停车位的使用,将停车位的信息与对应的终端信息一并存储到云平台中;
[0079]
(2)当驾驶人回到停车场找寻对应的停车位时,智能终端模块向云平台请求停车位信息,在获得相关信息后进行相关的路线规划;
[0080]
如图4所示,本发明中无人机模块与智能终端模块中的信息数据基本都是经由云平台进行传递,只有当智能终端需要接收无人机给出的提醒信息例如离开停车场时的开始收费提醒,才会直接与无人机进行信息传递。
[0081]
如图5所示,当夜晚天黑时,由于仅凭停车场内部的路灯难以解决无人机上摄像机的曝光不足问题,此时摄像机所采取的视频流出现噪点增多,细节不明显的问题。此时打开另一摄像头来采集停车场的黑白图像,实现双摄像头同时采集视频流,将此黑白图像与原图像进行图像融合可使得图像细节增强便于后续进行边缘检测。
[0082]
以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

