1.本发明涉及火灾监控识别技术领域,特别涉及基于机器视觉的电力设备潜在火警识别系统及方法。
背景技术:
2.随着社会的发展与城市化建设的进一步扩大,室内外的火灾防范问题日益突出,因火灾造成的经济损失与人员伤亡十分严重,其中由电力设备故障引发的火灾众多,而由电力设备故障引发的火灾其后果往往不堪设想,有时会发生“火烧连片”使一大批电力设备烧毁,甚至发生触电伤亡事故。
3.目前,火灾自动报警系统已经在各个领域有了广泛的应用,例如:针对室内的火灾检测与报警一般采用烟雾报警器,针对森林的火灾检测一般采用热成像与红外结合的远距离防火设备。上述两种火灾报警系统,均存在相应的缺陷,首先烟雾报警器对烟雾浓度与一氧化碳的浓度有所要求,只能在火势到达一定程度后才能进行报警并启动喷头进行灭火,而对于电力设备故障引发的火灾,因电力设备的自身特性,如果不及时的发现火情,其火情将随着时间的流逝快速扩散,后果不堪设想;其次通过热成像与红外检测的手段进行火灾检测虽然十分准确,但其造价成本昂贵,单个摄像设备的成本就能达到数万甚至数十万以上。所以,找到一种能够及时准确的进行电力设备火灾检测,且造价成本相对较低的火灾识别技术十分重要。
技术实现要素:
4.本发明提供了基于机器视觉的电力设备潜在火警识别系统及方法,能够及时的对火情进行检测,并有效提高火情检测的准确性。
5.本发明提供的基础方案:
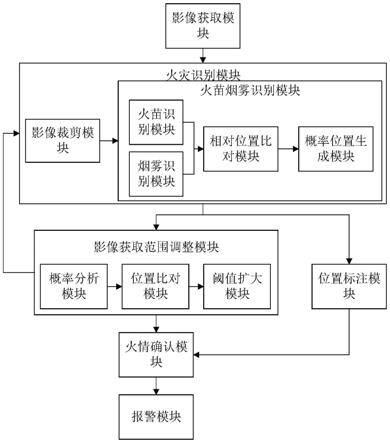
6.基于机器视觉的电力设备潜在火警识别系统,包括影像获取模块、火灾识别模块、影像获取范围调整模块和火情确认模块:
7.所述影像获取模块,包括多个影像获取装置,用于分别获取初始距离阈值范围内的影像;
8.所述火灾识别模块,用于分析并识别所述影像中的火灾情况,并生成火灾识别报告,所述火灾识别报告包括火灾发生概率及火灾位置数据;
9.所述影像获取范围调整模块,用于根据所述火灾识别报告,扩大影像获取装置的影像获取范围;
10.所述火情确认模块,用于根据扩大所述影像获取装置的影像获取范围后,生成的火灾识别报告,生成火情确认报告。
11.本发明的原理及优点在于:本方案中,通过对各影像获取装置获取的影像进行火灾情况识别,并生成火灾识别报告,能够及时的对火灾情况进行检测,从而达到早发现早控制的目的;除此之外,根据所述火灾识别报告,扩大影像获取装置的影像获取范围,从而可
以根据火灾发生概率和火灾位置数据,对各影像获取装置的影像获取范围进行扩大,由此使得扩大影像获取范围后,能够拍摄到火灾位置的其他影像获取装置也对可能发生火灾的位置的影像进行获取,从而根据多个影像获取装置获取的火灾发生位置的影像,生成的火灾识别报告,生成火情确认报告,由此,可以在火灾发生概率较低时,保证各影像获取装置仅获取小范围内的影像,减小各影像获取装置获取的影像的重合度,减小火灾识别模块的工作量,从而提高其工作效率,加快其火灾识别速度,除此之外,根据初步生成的火灾识别报告,扩大影像获取装置的影像获取范围,从而使得更多影像获取装置获取到火灾位置的影像数据,从而能够从多个角度、时间点对可能发生火灾位置的火灾情况进行检测,增加检测的准确度,从而防止火情误报;另外,与采用热成像与红外结合的远距离防火设备进行火灾检测相比,本方案中仅需采用普通的影像采集装置即可,其成本更低。综上所述,采用本方案能够及时的对火情进行检测,并有效提高火情检测的准确性,同时其成本相对采用热成像与红外结合的远距离防火设备进行火灾检测更低。
12.进一步,所述影像获取模块存储有初始距离阈值和最大距离阈值,还存储有各影像获取装置获取最大距离阈值范围内的影像时,影像中的边界对应的实地位置范围;
13.所述影像获取范围调整模块包括概率分析模块、位置比对模块和阈值扩大模块:
14.所述概率分析模块,用于将所述火灾发生概率与概率阈值进行比对,生成概率比对结果;
15.所述位置比对模块,用于所述火灾发生概率高于概率阈值时,将所述火灾位置数据与各影像获取装置对应的实地位置范围进行比对,生成位置比对结果;
16.所述阈值扩大模块,用于根据所述位置比对结果,扩大所述影像获取装置的影像获取范围。
17.有益效果:仅有火灾发生概率高于概率阈值时,才对影像获取装置的影像获取范围进行扩大,从而减小火灾识别模块的识别量,增加火灾识别的效率。影像获取模块存储有各影像获取装置获取最大距离阈值范围内的影像时,影像中的边界对应的实地位置范围,从而可以得到各影像获取装置获取的影像在实地中最大的范围,以便根据火灾识别报告中的火灾位置数据,找到获取最大距离阈值范围内的影像时,能够获取到该火灾位置的影像的影像获取装置,从而能够仅针对该影像获取装置进行影像获取范围的扩大,以增加火灾识别与确认的效率。
18.进一步,所述位置比对结果为火灾位置数据是否在影像获取装置对应的实地位置范围内;
19.所述阈值扩大模块,用于火灾位置数据在影像获取装置对应的实地位置范围内时,扩大该影像获取装置的影像获取范围;
20.所述火灾识别模块,还用于分析并识别扩大影像获取范围后的各影像获取装置获取的影像,并生成各影像对应的火灾识别报告;
21.所述火情确认模块,用于根据各影像对应的火灾识别报告,生成火情确认报告。
22.有益效果:火灾位置数据在影像获取装置对应的实地位置范围内时,扩大该影像获取装置的影像获取范围,也即针对性的对影像获取装置的影像获取范围进行扩大,从而避免获取与识别无法采集到可能发生火灾的位置的影像,提高火灾识别效率。
23.进一步,所述火灾识别模块包括影像裁剪模块和火苗烟雾识别模块:
24.所述影像裁剪模块,用于根据所述火灾位置数据,裁剪所述影像获取装置获取的影像,生成裁剪后的影像;
25.所述火苗烟雾识别模块,用于分析并识别裁剪后的影像中的火灾情况,并生成火灾识别报告。
26.有益效果:扩大影像获取范围后,影像面积增大,如果直接对增大面积后的影像进行火灾识别,其需要识别的区域很大,故本方案中根据所述火灾位置数据,裁剪所述影像获取装置获取的影像,减小影像的面积,从而缩小待进行火灾识别的范围。
27.进一步,所述火苗烟雾识别模块包括火苗识别模块、烟雾识别模块、相对位置比对模块和概率位置生成模块:
28.所述火苗识别模块,用于对影像进行火苗识别,并获取火苗的位置数据;
29.所述烟雾识别模块,用于对影像进行烟雾识别,并获取烟雾的位置数据;
30.所述相对位置比对模块,用于根据所述火苗的位置数据和所述烟雾的位置数据,比对火苗和烟雾的相对位置,生成相对位置数据;
31.所述概率位置生成模块,用于根据所述相对位置数据,生成火灾发生概率及火灾位置数据。
32.有益效果:对火苗和烟雾进行识别并分别获取其位置数据,然后根据二者的相对位置数据对火灾发生概率和火灾位置数据进行判定,从而避免小型灯光闪烁、电水壶烧水等类型情况造成的火灾情况误报。
33.进一步,还包括位置标注模块,用于根据所述火苗的位置数据和所述烟雾的位置数据,在影像中对所述火苗的位置和所述烟雾的位置进行标注,生成火灾标注影像;所述火情确认报告包括火灾标注影像及确认火灾是否发生的火情确认信息。
34.有益效果:对火苗的位置和烟雾的位置进行标注,便于查看火灾发生的位置。
35.进一步,所述标注包括画圈标注和箭头标注。
36.有益效果:通过多种方式进行标注。
37.进一步,还包括报警模块,用于所述火情确认信息为确认火灾发生时,发送报警信息及火灾标注影像至云服务器。
38.有益效果:发生火灾时,用户可及时通过报警信息知悉火灾情况,可通过云服务器查看报警信息和火灾标注影像。
39.基于机器视觉的电力设备潜在火警识别方法,其特征在于:包括以下步骤:
40.影像获取步骤,获取初始距离阈值范围内的影像;
41.火灾识别步骤,分析并识别所述影像中的火灾情况,并生成火灾识别报告,所述火灾识别报告包括火灾发生概率及火灾位置数据;
42.影像获取范围调整步骤,根据所述火灾识别报告,扩大影像获取装置的影像获取范围;
43.火情确认步骤,根据扩大所述影像获取装置的影像获取范围后,生成的火灾识别报告,生成火情确认报告。
附图说明
44.图1为本发明实施例基于机器视觉的电力设备潜在火警识别系统的逻辑框图。
45.图2为本发明实施例基于机器视觉的电力设备潜在火警识别方法的流程框图。
具体实施方式
46.下面通过具体实施方式进一步详细说明:
47.实施例1:
48.实施例1基本如附图1所示:
49.基于机器视觉的电力设备潜在火警识别系统,包括影像获取模块、火灾识别模块、影像获取范围调整模块和火情确认模块:
50.所述影像获取模块,包括多个影像获取装置,用于分别获取初始距离阈值范围内的影像,本实施例中,包括4个横向阵列式设置的影像获取装置;所述影像获取模块存储有初始距离阈值和最大距离阈值,还存储有各影像获取装置获取最大距离阈值范围内的影像时,影像中的边界对应的实地位置范围;
51.所述火灾识别模块,用于分析并识别所述影像中的火灾情况,并生成火灾识别报告,所述火灾识别报告包括火灾发生概率及火灾位置数据,所述火灾位置数据指影像中的火灾发生点及火灾发生点在实地中对应的位置。
52.所述影像获取范围调整模块,用于根据所述火灾识别报告,扩大影像获取装置的影像获取范围。影像获取范围调整模块包括概率分析模块、位置比对模块和阈值扩大模块:所述概率分析模块,用于将所述火灾发生概率与概率阈值进行比对,生成概率比对结果;所述位置比对模块,用于所述火灾发生概率高于概率阈值时,将火灾发生点在实地中对应的位置与各影像获取装置对应的实地位置范围进行比对,生成位置比对结果,所述位置比对结果为火灾发生点在实地中对应的位置是否在影像获取装置对应的实地位置范围内;所述阈值扩大模块,用于火灾发生点在实地中对应的位置在影像获取装置对应的实地位置范围内时,扩大该影像获取装置的影像获取范围。
53.所述火灾识别模块,还用于分析并识别扩大影像获取范围后的各影像获取装置获取的影像,并生成各影像对应的火灾识别报告;所述火灾识别模块包括影像裁剪模块和火苗烟雾识别模块:所述影像裁剪模块,用于根据影像中的火灾发生点,裁剪所述影像获取装置获取的影像,生成裁剪后的影像;所述火苗烟雾识别模块,用于分析并识别裁剪后的影像中的火灾情况,并生成火灾识别报告。所述火苗烟雾识别模块包括火苗识别模块、烟雾识别模块、相对位置比对模块和概率位置生成模块:所述火苗识别模块,用于对影像进行火苗识别,并获取火苗的位置数据;所述烟雾识别模块,用于对影像进行烟雾识别,并获取烟雾的位置数据;所述相对位置比对模块,用于根据所述火苗的位置数据和所述烟雾的位置数据,比对火苗和烟雾的相对位置,生成相对位置数据,具体的,由于火苗和烟雾的位置具有关联性,也即一般情况下,火苗所在位置应当在烟雾的下方,且火苗与烟雾应当具有连接点,故本实施例中,对火苗和烟雾的相对位置进行比对,具体的,对火苗是否在烟雾下方、火苗与烟雾是否有连接点进行分析,并生成相应的结果;所述概率位置生成模块,用于根据所述相对位置数据,生成火灾发生概率及火灾位置数据,具体的,当火苗在烟雾下方且火苗与烟雾有连接点时,生成火灾发生概率100%;当火苗在烟雾上方且火苗与烟雾无连接点时,生成火灾发生概率20%;其余时候生成火灾发生概率50%。
54.所述火情确认模块,用于根据扩大所述影像获取装置的影像获取范围后,各影像
对应的火灾识别报告,生成的火灾识别报告,生成火情确认报告,所述火情确认报告包括确认火灾是否发生的火情确认信息。具体的,将各影像对应的火灾识别报告中,火灾发生概率求平均值,根据所述平均值,生成确认火灾是否发生的火情确认信息,当所述平均值高于70%时,生成确认火灾发生的火情确认信息,否则生成火灾未发生的火情确认信息。
55.还包括位置标注模块,用于根据所述火苗的位置数据和所述烟雾的位置数据,在影像中对所述火苗的位置和所述烟雾的位置进行标注,生成火灾标注影像,所述火情确认报告还包括火灾标注影像。具体的,本实施例中,对火苗的标注采用箭头标注,对烟雾的标注采用画圈标注。
56.还包括报警模块,用于所述火情确认信息为确认火灾发生时,发送报警信息及火灾标注影像至云服务器。
57.实施例2:
58.实施例2基本如附图2所示:
59.基于机器视觉的电力设备潜在火警识别方法,包括影像获取步骤、火灾识别步骤、影像获取范围调整步骤和火情确认步骤:
60.所述影像获取步骤,采用多个影像获取装置分别获取初始距离阈值范围内的影像,本实施例中,包括4个横向阵列式设置的影像获取装置;
61.所述火灾识别步骤,分析并识别所述影像中的火灾情况,并生成火灾识别报告,所述火灾识别报告包括火灾发生概率及火灾位置数据,所述火灾位置数据指影像中的火灾发生点及火灾发生点在实地中对应的位置。
62.所述影像获取范围调整步骤,根据所述火灾识别报告,扩大影像获取装置的影像获取范围。影像获取范围调整步骤包括概率分析步骤、位置比对步骤和阈值扩大步骤:所述概率分析步骤,将所述火灾发生概率与概率阈值进行比对,生成概率比对结果;所述位置比对步骤,所述火灾发生概率高于概率阈值时,将火灾发生点在实地中对应的位置与各影像获取装置对应的实地位置范围进行比对,生成位置比对结果,所述位置比对结果为火灾发生点在实地中对应的位置是否在影像获取装置对应的实地位置范围内;所述阈值扩大步骤,火灾发生点在实地中对应的位置在影像获取装置对应的实地位置范围内时,扩大该影像获取装置的影像获取范围。
63.所述火灾识别步骤,分析并识别扩大影像获取范围后的各影像获取装置获取的影像,并生成各影像对应的火灾识别报告;所述火灾识别步骤包括影像裁剪步骤和火苗烟雾识别步骤:所述影像裁剪步骤,根据影像中的火灾发生点,裁剪所述影像获取装置获取的影像,生成裁剪后的影像;所述火苗烟雾识别步骤,分析并识别裁剪后的影像中的火灾情况,并生成火灾识别报告。所述火苗烟雾识别步骤包括火苗识别步骤、烟雾识别步骤、相对位置比对步骤和概率位置生成步骤:所述火苗识别步骤,对影像进行火苗识别,并获取火苗的位置数据;所述烟雾识别步骤,对影像进行烟雾识别,并获取烟雾的位置数据;所述相对位置比对步骤,根据所述火苗的位置数据和所述烟雾的位置数据,比对所述火苗和烟雾的相对位置,生成相对位置数据,具体的,由于火苗和烟雾的位置具有关联性,也即一般情况下,火苗所在位置应当在烟雾的下方,且火苗与烟雾应当具有连接点,故本实施例中,对火苗和烟雾的相对位置进行比对,具体的,对火苗是否在烟雾下方、火苗与烟雾是否有连接点进行分析,并生成相应的结果;所述概率位置生成步骤,根据所述相对位置数据,生成火灾发生概
率及火灾位置数据,具体的,当火苗在烟雾下方且火苗与烟雾有连接点时,生成火灾发生概率100%;当火苗在烟雾上方且火苗与烟雾无连接点时,生成火灾发生概率20%;否则生成火灾发生概率50%。
64.所述火情确认步骤,根据扩大所述影像获取装置的影像获取范围后,各影像对应的火灾识别报告,生成的火灾识别报告,生成火情确认报告,所述火情确认报告包括确认火灾是否发生的火情确认信息。具体的,将各影像对应的火灾识别报告中,火灾发生概率求平均值,根据所述平均值,生成确认火灾是否发生的火情确认信息,当所述平均值高于70%时,生成确认火灾发生的火情确认信息,否则生成火灾未发生的火情确认信息。
65.还包括位置标注步骤,根据所述火苗的位置数据和所述烟雾的位置数据,在影像中对所述火苗的位置和所述烟雾的位置进行标注,生成火灾标注影像,所述火情确认报告还包括火灾标注影像。具体的,本实施例中,对火苗的标注采用箭头标注,对烟雾的标注采用画圈标注。
66.还包括报警步骤,所述火情确认信息为确认火灾发生时,发送报警信息及火灾标注影像至云服务器。
67.以上的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

