1.本发明涉及交通路网状态领域,特别是涉及一种基于模糊聚类的交通网络健康画像方法及系统。
背景技术:
2.近年来,随着气候变化加剧,极端灾害事件不断发生,如台风、暴雨、疫情、地震等突发事件,研究城市交通韧性具有十分重要的理论价值与现实意义,北京、上海等城市的新一轮城市总体规划中,均有“加强城市应对灾害的能力和提高城市韧性”等相关表述。今年突如其来的疫情危机,让我们对“城市韧性”有了更感性的认识,对城市如何在日益增长且变幻莫测的风险和挑战中正常运行并保持韧性这一议题,有了更理性的思考。突发事件的出现,给当下城市空间的定义与使用带来巨大冲击与影响。突发事件不断重塑城市和社会,并间接促进了现代城市规划的诞生及其演进。疫情期间,城市服务与供给模式发生了全面线上化转变,城市居住、就业与交通等空间的功能形态与使用模式均面临重新定义。城市交通路网作为“韧性城市”的生命线,国家发展、社会安全保障以及人民生活质量的保证,交通路网的健康水平能够反映城市路网在维持日常运行和应对突发事件的综合能力,因此监测城市交通路网的健康水平并对其进行评估已成为重要任务。
3.交通健康画像是交通路网健康状态评估的基础。以前的交通健康状况评估主要基于每条道路的统计测量值总和或平均值,例如平均速度,平均行驶延迟时间,拥挤道路的平均距离等。然而,由于城市交通系统本身具有高度复杂性、耦合性,这些基于统计的测量很少考虑道路性能之间的耦合关系,不能站在路网全局的角度对交通路网健康状态进行合理评估,影响路网健康评估的准确性。另一方面,已有研究提出可以基于渗流的分析方法来描述交通路网的整体运行状态,可以作为城市交通路网的健康评估指标。
4.此外,在交通系统评估中存在大量的认知不确定性,认知不确定性是主观的,通常是由于系统的复杂性、信息的不完备性和模糊性、人类认知的缺乏性等,导致在一定时间范围内无法掌握或理解事物的本质特征,存在严重的“数据量大,知识贫乏”的特点。以前对交通网络的健康水平的定义主要基于对指标区间的人为定义,往往具有较强的主观性,不能很好地反映事物的客观机理。
5.因此,从大数据中挖掘路网健康机理可以有效解决主观性过强的问题,目前研究学者通过运用统计数学理论和方法对路网的历史数据进行统计分析,挖掘交通路网的实时运行特征,减少主观因素对路网评估的影响,但现有的统计分析方法无法根据特征将路网进行健康状态的划分。
技术实现要素:
6.本发明的目的是提供一种基于模糊聚类的交通网络健康画像方法及系统,能够对交通网络的健康状态进行准确的分类,从而解决城市路网健康画像的问题。
7.为实现上述目的,本发明提供了如下方案:
8.一种基于模糊聚类的交通网络健康画像方法,包括:
9.获取待分析的路网区域中设定时间内车辆道路信息;所述车辆道路信息包括:道路编号、道路起点编号、道路终点编号、道路等级、道路信息、每个时刻的道路车辆速度以及经纬度信息;
10.对所述车辆道路信息进行预处理,并根据预处理后的数据构建所述待分析的路网区域的城市交通流网络;
11.采用渗流分析的方法确定不同时刻的城市交通流网络的健康状态;
12.采用聚类分析的方法对不同时刻的城市交通流网络的健康状态进行划分;
13.利用划分结果对待分析的路网区域的城市交通流网络进行健康画像。
14.可选地,所述对所述车辆道路信息进行预处理,并根据预处理后的数据构建所述待分析的路网区域的城市交通流网络,具体包括:
15.将道路信息与每个时刻的道路车辆速度进行匹配;并对缺失的道路车辆速度进行补全;
16.将道路起点编号、道路终点编号和经纬度进行匹配;
17.以所述待分析的路网区域内的道路为城市交通流网络的连边,以路口为城市交通流网络的节点,以每条道路的实时相对车辆速度为连边权值,构建城市交通流网络。
18.可选地,所述采用渗流分析的方法确定不同时刻的城市交通流网络的健康状态,具体包括:
19.获取相对速度阈值;所述相对速度阈值为0到1按照设定精度变化的数值;
20.将所述城市交通流网络中每条道路的实时相对车辆速度小于相应时刻下相对速度阈值的连边删除,并确定相应时刻下城市交通流网络的最大连通子团尺寸;
21.根据每个时刻下城市交通流网络的最大连通子团尺寸以及对应的相对速度阈值确定不同时刻的g
‑
q曲线图;其中,g为最大连通子团尺寸,q为相对速度阈值;
22.将不同时刻的g
‑
q曲线图转换为g
‑
f曲线图;其中,f为删除的连边与城市交通流网络的总边数的比;
23.根据不同时刻的g
‑
f曲线图确定不同时刻的城市交通流网络的健康状态。
24.可选地,所述采用聚类分析的方法对不同时刻的城市交通流网络的健康状态进行划分,具体包括:
25.根据不同时刻的g
‑
f曲线图确定相应时刻的聚类特征向量;
26.利用fcm聚类算法对特征向量进行模糊聚类将城市交通流网络的健康状态划分为健康或不健康。
27.可选地,所述利用划分结果对待分析的路网区域的城市交通流网络进行健康画像,具体包括:
28.分别确定健康的城市交通流网络以及不健康的城市交通流网络的网络结构指标和网络运行指标;所述网络结构指标包括:平均度和动态介数;所述网络运行指标包括:tti指数和网络平均速度;
29.网络结构指标和网络运行指标分别对相应的城市交通流网络进行健康画像。
30.一种基于模糊聚类的交通网络健康画像系统,包括:
31.车辆道路信息获取模块,用于获取待分析的路网区域中设定时间内车辆道路信
息;所述车辆道路信息包括:道路编号、道路起点编号、道路终点编号、道路等级、道路信息、每个时刻的道路车辆速度以及经纬度信息;
32.城市交通流网络构建模块,用于对所述车辆道路信息进行预处理,并根据预处理后的数据构建所述待分析的路网区域的城市交通流网络;
33.城市交通流网络的健康状态确定模块,用于采用渗流分析的方法确定不同时刻的城市交通流网络的健康状态;
34.划分结果确定模块,用于采用聚类分析的方法对不同时刻的城市交通流网络的健康状态进行划分;
35.健康画像模块,用于利用划分结果对待分析的路网区域的城市交通流网络进行健康画像。
36.可选地,所述城市交通流网络构建模块具体包括:
37.第一匹配单元,用于将道路信息与每个时刻的道路车辆速度进行匹配;并对缺失的道路车辆速度进行补全;
38.第二匹配单元,用于将道路起点编号、道路终点编号和经纬度进行匹配;
39.城市交通流网络构建单元,用于以所述待分析的路网区域内的道路为城市交通流网络的连边,以路口为城市交通流网络的节点,以每条道路的实时相对车辆速度为连边权值,构建城市交通流网络。
40.可选地,所述城市交通流网络的健康状态确定模块具体包括:
41.相对速度阈值获取单元,用于获取相对速度阈值;所述相对速度阈值为0到1按照设定精度变化的数值;
42.最大连通子团尺寸确定单元,用于将所述城市交通流网络中每条道路的实时相对车辆速度小于相应时刻下相对速度阈值的连边删除,并确定相应时刻下城市交通流网络的最大连通子团尺寸;
43.g
‑
q曲线图确定单元,用于根据每个时刻下城市交通流网络的最大连通子团尺寸以及对应的相对速度阈值确定不同时刻的g
‑
q曲线图;其中,g为最大连通子团尺寸,q为相对速度阈值;
44.转换单元,用于将不同时刻的g
‑
q曲线图转换为g
‑
f曲线图;其中,f为删除的连边与城市交通流网络的总边数的比
45.城市交通流网络的健康状态确定单元,用于根据不同时刻的g
‑
f曲线图确定不同时刻的城市交通流网络的健康状态。
46.可选地,所述划分结果确定模块具体包括:
47.聚类特征向量确定单元,用于根据不同时刻的g
‑
f曲线图确定相应时刻的聚类特征向量;
48.划分结果确定单元,用于利用fcm聚类算法对特征向量进行模糊聚类将城市交通流网络的健康状态划分为健康或不健康。
49.可选地,所述健康画像模块具体包括:
50.指标确定单元,用于分别确定健康的城市交通流网络以及不健康的城市交通流网络的网络结构指标和网络运行指标;所述网络结构指标包括:平均度和动态介数;所述网络运行指标包括:tti指数和网络平均速度;
51.健康画像单元,用于网络结构指标和网络运行指标分别对相应的城市交通流网络进行健康画像。
52.根据本发明提供的具体实施例,本发明公开了以下技术效果:
53.本发明所提供的一种基于模糊聚类的交通网络健康画像方法及系统,通过交通渗流分析描绘交通路网状态,同时运用模糊聚类方法对交通路网的状态进行健康分类,从而解决城市路网健康画像的问题。采用模糊聚类的方法来解决路网健康界限划分不清晰的问题,从大数据中挖掘健康路网和不健康路网两类网络,确定健康网络和不健康网络在特征指标上所表现出的差异性,从而实现路网的健康画像功能,为后续的交通路网健康评估奠定基础。
附图说明
54.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
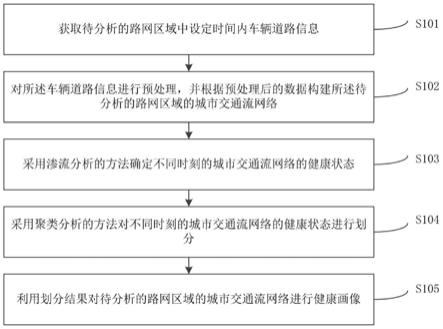
55.图1为本发明所提供的一种基于模糊聚类的交通网络健康画像方法流程示意图;
56.图2为不同时刻的城市交通流网络的健康状态示意图;
57.图3为城市交通流网络的特征指标示意图;
58.图4为本发明所提供的一种基于模糊聚类的交通网络健康画像系统结构示意图。
具体实施方式
59.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
60.本发明的目的是提供一种基于模糊聚类的交通网络健康画像方法及系统,能够对交通网络的健康状态进行准确的分类,从而解决城市路网健康画像的问题。
61.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
62.图1为本发明所提供的一种基于模糊聚类的交通网络健康画像方法流程示意图,如图1所示,本发明所提供的一种基于模糊聚类的交通网络健康画像方法,包括:
63.s101,获取待分析的路网区域中设定时间内车辆道路信息;所述车辆道路信息包括:道路编号、道路起点编号、道路终点编号、道路等级、道路信息、每个时刻的道路车辆速度以及经纬度信息;
64.s102,对所述车辆道路信息进行预处理,并根据预处理后的数据构建所述待分析的路网区域的城市交通流网络;
65.s102具体包括:
66.将道路信息与每个时刻的道路车辆速度进行匹配;并对缺失的道路车辆速度进行补全;由于某些路段缺少相关数据采集设备的安置以及在某些时刻没有车辆通过道路的数
据采集设备,而导致采集的速度数据出现缺失现象,对此进行速度数据补偿,将缺失的速度补全。
67.将道路起点编号、道路终点编号和经纬度进行匹配;
68.以所述待分析的路网区域内的道路为城市交通流网络的连边,以路口为城市交通流网络的节点,以每条道路的实时相对车辆速度为连边权值,构建城市交通流网络。
69.其中,
70.v
c
表示相对速度;v表示道路实际速度,v
max
表示该道路在整个规定时间内的最大速度。
71.s103,采用渗流分析的方法确定不同时刻的城市交通流网络的健康状态;
72.s103具体包括:
73.获取相对速度阈值;所述相对速度阈值为0到1按照设定精度变化的数值;设定精度如0.1。
74.将所述城市交通流网络中每条道路的实时相对车辆速度小于相应时刻下相对速度阈值的连边删除,并确定相应时刻下城市交通流网络的最大连通子团尺寸;
75.根据每个时刻下城市交通流网络的最大连通子团尺寸以及对应的相对速度阈值确定不同时刻的g
‑
q曲线图;其中,g为最大连通子团尺寸,q为相对速度阈值;
76.即每次删除v
c
小于q的连边,然后计算在删除连边下道路网络的最大连通子团尺寸g,通过对各时刻下道路网络的多次渗流,最终得到各时刻的g
‑
q曲线图。
77.将不同时刻的g
‑
q曲线图转换为g
‑
f曲线图;其中,f为删除的连边与城市交通流网络的总边数的比。
78.每个相对速度阈值q下的删边比例f,即v
c
小于q的连边数量占整个路网连边数量的比例,从而将g
‑
q曲线图转换为g
‑
f曲线图,利用各时刻的g
‑
f曲线描述路网所处该时刻的健康状态。
79.根据不同时刻的g
‑
f曲线图确定不同时刻的城市交通流网络的健康状态。
80.s104,采用聚类分析的方法对不同时刻的城市交通流网络的健康状态进行划分;
81.s104具体包括:
82.根据不同时刻的g
‑
f曲线图确定相应时刻的聚类特征向量;
83.作为一个具体的实施例,计算每一条g
‑
f曲线距离x轴的面积,作为各时刻网络的聚类特征向量。
84.利用fcm聚类算法对特征向量进行模糊聚类将城市交通流网络的健康状态划分为健康或不健康。
85.具体的,将划分的g
‑
f曲线进行标记,其中g
‑
f曲线先发生下降趋势的为不健康态,另一类则为健康态,如图2所示。
86.s105,利用划分结果对待分析的路网区域的城市交通流网络进行健康画像。
87.s105具体包括:
88.分别确定健康的城市交通流网络以及不健康的城市交通流网络的网络结构指标和网络运行指标,并如图3所示;所述网络结构指标包括但不限于平均度和动态介数;所述网络运行指标包括但不限于tti指数和网络平均速度;即从多角度提出并计算可以用于评
估交通网络效能的特征指标。
89.网络结构指标和网络运行指标分别对相应的城市交通流网络进行健康画像。
90.分别绘制特征指标随健康种类隶属度变化图,不同种类的特征指标箱线图,以及特征指标随时间变化图,从多角度描绘两类网络在特征指标上所表现的差异性,从而描绘城市交通网络健康态和不健康态各自所具有的特征,实现健康画像。
91.通过计算城市交通网络的结构指标和运行指标等相关特征指标,描绘出健康网络和不健康网络在特征指标上所表现出的差异性,从而实现路网的健康画像功能,为后续的交通路网健康评估奠定基础。
92.图4为本发明所提供的一种基于模糊聚类的交通网络健康画像系统结构示意图,如图4所示,本发明所提供的一种基于模糊聚类的交通网络健康画像系统,包括:
93.车辆道路信息获取模块401,用于获取待分析的路网区域中设定时间内车辆道路信息;所述车辆道路信息包括:道路编号、道路起点编号、道路终点编号、道路等级、道路信息、每个时刻的道路车辆速度以及经纬度信息;
94.城市交通流网络构建模块402,用于对所述车辆道路信息进行预处理,并根据预处理后的数据构建所述待分析的路网区域的城市交通流网络;
95.城市交通流网络的健康状态确定模块403,用于采用渗流分析的方法确定不同时刻的城市交通流网络的健康状态;
96.划分结果确定模块404,用于采用聚类分析的方法对不同时刻的城市交通流网络的健康状态进行划分;
97.健康画像模块405,用于利用划分结果对待分析的路网区域的城市交通流网络进行健康画像。
98.所述城市交通流网络构建模块402具体包括:
99.第一匹配单元,用于将道路信息与每个时刻的道路车辆速度进行匹配;并对缺失的道路车辆速度进行补全;
100.第二匹配单元,用于将道路起点编号、道路终点编号和经纬度进行匹配;
101.城市交通流网络构建单元,用于以所述待分析的路网区域内的道路为城市交通流网络的连边,以路口为城市交通流网络的节点,以每条道路的实时相对车辆速度为连边权值,构建城市交通流网络。
102.所述城市交通流网络的健康状态确定模块403具体包括:
103.相对速度阈值获取单元,用于获取相对速度阈值;所述相对速度阈值为0到1按照设定精度变化的数值;
104.最大连通子团尺寸确定单元,用于将所述城市交通流网络中每条道路的实时相对车辆速度小于相应时刻下相对速度阈值的连边删除,并确定相应时刻下城市交通流网络的最大连通子团尺寸;
105.g
‑
q曲线图确定单元,用于根据每个时刻下城市交通流网络的最大连通子团尺寸以及对应的相对速度阈值确定不同时刻的g
‑
q曲线图;其中,g为最大连通子团尺寸,q为相对速度阈值;
106.转换单元,用于将不同时刻的g
‑
q曲线图转换为g
‑
f曲线图;其中,f为删除的连边与城市交通流网络的总边数的比;
107.城市交通流网络的健康状态确定单元,用于根据不同时刻的g
‑
f曲线图确定不同时刻的城市交通流网络的健康状态。
108.所述划分结果确定模块404具体包括:
109.聚类特征向量确定单元,用于根据不同时刻的g
‑
f曲线图确定相应时刻的聚类特征向量;
110.划分结果确定单元,用于利用fcm聚类算法对特征向量进行模糊聚类将城市交通流网络的健康状态划分为健康或不健康。
111.所述健康画像模块405具体包括:
112.指标确定单元,用于分别确定健康的城市交通流网络以及不健康的城市交通流网络的网络结构指标和网络运行指标;所述网络结构指标包括:平均度和动态介数;所述网络运行指标包括:tti指数和网络平均速度;
113.健康画像单元,用于网络结构指标和网络运行指标分别对相应的城市交通流网络进行健康画像。
114.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
115.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

