1.本实用新型涉及一种矿用混凝土喷射机射手,用于提高混凝土喷射机的喷射质量,提高其作业过程的自动化程度。
背景技术:
2.随着煤炭的大量开采,矿山隧道、井巷及地下工程的混凝土喷射支护技术也得到快速的发展。而传统的人工手持喷嘴进行混凝土喷射作业过程中存在一定的问题:喷射效率低,回弹大、混凝土喷射强度低,喷射距离、角度等工艺参数难以控制,工程实践中,缺乏一种具有一定工程应用价值的新型矿用混凝土喷射机射手,导致现有的混凝土湿喷机的喷射质量受限,喷射过程中主要依靠人力,作业过程的自动化程度普遍较低。
技术实现要素:
3.本发明的内容是提供一种作业过程能够实现自动控制的一种矿用混凝土喷射机射手。
4.为实现上述发明目的,本发明采取的技术方案为:一种矿用混凝土喷射机射手,包括喷头单元,所述喷头单元固定安装在可伸缩杆上,所述可伸缩杆整体固定在固定座上,摆动梁一端与所述固定座铰接,另外一端与法兰座铰接,所述摆动梁上设置有第一液压缸单元、第二液压缸单元和第三液压缸单元,所述第一液压缸单元和所述第二液压缸单元分别位于所述摆动梁的两侧,所述第一液压缸单元和所述第二液压缸单元一端均固定在所述法兰座上,另外一端均固定在所述摆动梁上,所述第三液压缸单元一端固定在所述摆动梁上,另外一端固定在所述固定座上,所述法兰座固定安装在水平回转机构上,所述水平回转机构固定安装在竖直回转机构上。
5.上述方案中,所述第一液压缸单元、第二液压缸单元和第三液压缸单元在所述摆动梁上的固定处构成一个等边三角形结构。
6.上述方案中,第四液压缸单元一端固定在所述固定座上,另外一端固定在所述可伸缩杆上。
7.上述方案中,所述喷头单元包括喷头支撑座,所述喷头支撑座上方设置有第一回转电机,所述第一回转电机的输出轴通过联轴器固定在喷头摆动箱的箱壁内,所述喷头摆动箱内固定安装有第二回转电机,所述第二回转电机的输出轴上安装有蜗杆,所蜗杆与涡轮啮合,喷头固定安装在所述涡轮所在的涡轮轴上。
8.本发明的有益效果:(1)本发明的喷头单元、可伸缩杆和摆动梁作为整体,可以在水平回转机构的作用下在法兰座上水平转动,同时在竖直回转机构的作用下整体绕着水平回转机构在竖直平面内摆动;(2)喷头单元和可伸缩杆作为整体,可以在摆动梁三个液压缸单元的共同作用下,整体始终在水平位置上下运动;(3)喷头单元作为整体,可以在可伸缩杆的作用下,相对可伸缩杆水平运动;(4)喷头单元的喷头可以在第一回转电机和第二回转电机的作用下,实现在水平和竖直两个位置上的喷头位置微调。
附图说明
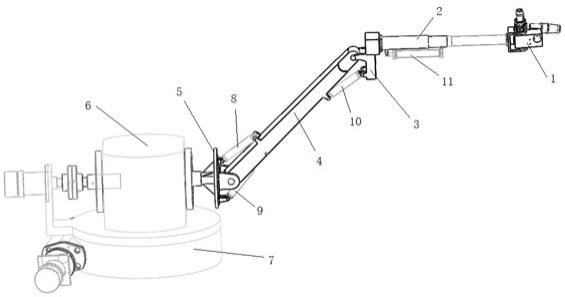
9.图1为本发明装置的整体结构示意图。
10.图2为本发明装置喷头单元结构示意图。
11.图3为本发明装置喷头支撑座内部的结构示意图。
12.图中:1.喷头单元;1
‑
1.喷头支撑座;1
‑
2.第一回转电机;1
‑
3.喷头摆动箱;1
‑
4.喷头;1
‑
5.第二回转电机;1
‑
6.蜗杆;1
‑
7.涡轮;2.可伸缩杆;3.固定座;4.摆动梁;5.法兰座;6.水平回转机构;7.竖直回转机构。
具体实施方式
13.下面结合附图,对本发明的技术方案进行更详细的说明。
14.如图1所示,本发明提供的一种矿用混凝土喷射机射手,包括喷头单元1,所述喷头单元1固定安装在可伸缩杆2上,所述可伸缩杆2整体固定在固定座3上,摆动梁4一端与所述固定座3铰接,另外一端与法兰座5铰接,所述摆动梁4上设置有第一液压缸单元8、第二液压缸单元9和第三液压缸单元10,所述第一液压缸单元8和所述第二液压缸单元9分别位于所述摆动梁4的两侧,所述第一液压缸单元8和所述第二液压缸单元9一端均固定在所述法兰座5上,另外一端均固定在所述摆动梁4上,所述第三液压缸单元10一端固定在所述摆动梁4上,另外一端固定在所述固定座3上,所述第一液压缸单元8、第二液压缸单元9和第三液压缸单元10在所述摆动梁4上的固定处构成一个等边三角形结构。所述法兰座5固定安装在水平回转机构6上,所述水平回转机构6固定安装在竖直回转机构7上。第四液压缸单元11一端固定在所述固定座3上,另外一端固定在所述可伸缩杆2上。所述喷头单元1包括喷头支撑座1
‑
1,所述喷头支撑座1
‑
1上方设置有第一回转电机1
‑
2,所述第一回转电机1
‑
2的输出轴通过联轴器固定在喷头摆动箱1
‑
3的箱壁内,所述喷头摆动箱1
‑
3内固定安装有第二回转电机1
‑
5,所述第二回转电机1
‑
5的输出轴上安装有蜗杆1
‑
6,所蜗杆1
‑
6与涡轮1
‑
7啮合,喷头1
‑
4固定安装在所述涡轮1
‑
7所在的涡轮轴上。
15.具体实施例:本实施例提供的混凝土喷射机射手包括底座部分、升降部分、水平伸缩部分、喷头部分四大部分构成。
16.1)底座部分:包括竖直回转机构7和位于竖直回转机构7上方的水平回转机构6,液压马达带动水平回转机构6在水平面内回转,以实现机械手的水平转动;液压马达带动竖直回转机构7回转,从而驱动机械手在竖直面内的回转摆动动作。
17.2)升降部分:包括摆动梁4和位于摆动梁4上的第一液压缸单元8、第二液压缸单元9和第三液压缸单元10,摆动梁4一端与所述固定座3铰接,另外一端与法兰座5铰接,所述第一液压缸单元8、第二液压缸单元9和第三液压缸单元10在所述摆动梁4上的固定处构成一个等边三角形结构,通过液压系统控制三个液压缸使其同步运动,可以保证与之连接的摆动梁4始终处于水平位置上下运动。
18.3)水平伸缩部分:包括可伸缩杆2和位于可伸缩杆2上的喷头单元1,第四液压缸单元11一端固定在所述固定座3上,另外一端固定在所述可伸缩杆2上。通过第四液压缸单元11和伸缩杆2自身的伸缩功能,实现对喷头单元1的两级伸缩目的,扩大其水平伸缩距离。
19.4)喷头部分:包括喷头支撑座1
‑
1,所述喷头支撑座1
‑
1上方设置有第一回转电机1
‑
2,所述第一回转电机1
‑
2的输出轴通过联轴器固定在喷头摆动箱1
‑
3的箱壁内,通过第一
回转电机1
‑
2带动喷头摆动箱1
‑
3回转,实现喷头1
‑
4水平面内的姿态微调整,以适应受喷面的变化,保证喷射混凝土喷射作业时,喷头1
‑
4与受喷面的之间的角度在85
‑
90度之间变化,从而保证混凝土的喷射质量及回弹率。所述喷头摆动箱1
‑
3内固定安装有第二回转电机1
‑
5,所述的输出轴上安装有蜗杆1
‑
6,所蜗杆1
‑
6与涡轮1
‑
7啮合,喷头1
‑
4固定安装在所述涡轮1
‑
7所在的涡轮轴上。通过第二回转电机1
‑
5带动蜗杆涡轮机构回转,实现喷头1
‑
4在竖直面内姿态微调整。
20.本实施例的混凝土喷射机射手一共可以实现6个自由度的运动:即:喷射机械手在水平面内的回转、竖直面内回转摆动、升降,水平伸缩,喷嘴姿态调整及划圆动作。底座的竖直回转机构7和水平回转机构6,承载能力强、回转精度高、结构紧凑;机械手竖直面内的回转摆动及喷头单元的姿态调整均采用了具有自锁性能涡轮蜗杆机构,以确保定位的精度。升降部分通过三个液压缸的同步运动,实现喷头单元在喷射混凝土作业过程中,始终处于水平位置,喷头单元上的第一回转电机1
‑
2和第二回转电机1
‑
5又有利于喷嘴的姿态微调整。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

