一种控制方法及一种控制系统
【技术领域】
1.本发明涉及流体控制领域,具体涉及一种对位置调节器的控制。
背景技术:
2.有的系统需要用到位置调节器以控制流路的通断或调节流量或节流等,位置调节器能够调节通过该位置调节器的流体的通断或调节通过该位置调节器的通流路径,位置调节器具有动作执行机构,能够在带动下动作的动作件以改变通过该位置调节器的通流路径或调节流体通流路径,位置调节器应用于一些系统如机动车,位置调节器在使用时的位置不会完全一样,这样系统需要掌握或控制位置调节器的动作件的相对准确的位置,有的会在位置调节器设置绝对位置传感器,但有的不带绝对位置传感器。
技术实现要素:
3.为使位置调节器的动作件的位置能相对准确的掌握或控制,且位置调节器尽快进入正常工作状态,本发明提供以下技术方案:
4.一种控制方法,能够用于具有位置调节器的系统,所述位置调节器包括电机与动作件,所述位置调节器具有与所述动作件抵接的至少一个抵接部;
5.在所述位置调节器下电或进入休眠阶段,所述控制方法包括:
6.a1、处理模块控制电机驱动控制模块,使所述位置调节器的所述动作件向与所述抵接部或其中一个抵接部抵接的方向运动;
7.b1、判断所述动作件是否与所述抵接部相抵接或是否到与抵接部抵接的位置;判断可以通过检测模块的检测结果或结合检测结果进行;
8.在所述位置调节器上电或唤醒阶段,所述控制方法包括:
9.a2、处理模块控制电机驱动控制模块,使所述位置调节器的所述动作件向与所述抵接部或其中靠近的抵接部抵接的方向运动;
10.b2、通过检测模块,判断所述动作件是否与所述抵接部相抵接或是否到与抵接部抵接的位置;
11.c2、通过判断所述动作件与所述抵接部的抵接位置,更新当前位置调节器的位置信息或以此为基准控制所述位置调节器。
12.同时还提供一种控制系统,控制系统包括控制器与位置调节器的执行机构,所述控制器控制所述位置调节器的执行机构动作,所述控制器包括收发模块、处理模块、电机驱动控制模块、驱动模块、检测模块;
13.所述收发模块用于接收和发送相关信息,接收的信息发送给所述处理模块;
14.所述处理模块接收相关的信息,处理和或判断后发出控制信号;所述处理模块经电机驱动控制模块控制所述驱动模块,所述驱动模块控制所述执行机构;
15.所述检测模块检测所述执行机构或所述驱动模块,并将相关检测结果发送给所述处理模块或经处理后发送给所述处理模块;
16.所述位置调节器包括电机与动作件,所述位置调节器具有与所述动作件抵接的至少一个抵接部;在所述位置调节器下电或进入休眠阶段,所述控制系统包括使所述位置调节器的动作件运动到与所述抵接部抵接的位置这一步骤。
17.这样在下电时,先控制位置调节器的动作件运动到某一端或相对靠近某一端,通过检测,找到动作件与抵接部抵接点,这样,在重新上电或开始工作时,由于动作件停在与其中的一抵接部抵接的位置或相对靠近与抵接部抵接的位置,复位所需时间可以相对缩短,上电后可以更快进入正常运行阶段,能更好地满足系统快速运行的需要。
附图说明
18.图1是控制系统的第一个实施例的模块示意图及通信连接示意图,位置调节器包括控制器,位置调节器通过lin总线与lin主节点即主控制器通信;
19.图2是又一实施例的模块示意图及与主系统的通信连接示意图,位置调节器包括控制器,位置调节器通过lin总线与lin主节点即所在的主控制器通信;图2a、图2b是两种实施例的局部电路示意图;
20.图3是基于另外一个实施例的位置调节器所在的系统的模块示意图,位置调节器的电控部分设置于主控制器;虚线部分示意两种可选的检测方式;
21.图4给出了位置调节器的动作件的运动方向的示意图及动作件与抵接部抵接方式的示意图;
22.图5是控制位置调节器的一种流程示意图;
23.图6是位置调节器相关应用的又一种流程示意图,其中图6a示意位置调节器下电或进入休眠阶段,图6b示意位置调节器上电或唤醒阶段;
24.图7是位置调节器相关应用的又一种流程示意图,其中图7a示意调节器下电或进入休眠阶段,图7b示意位置调节器上电或唤醒阶段;
25.图8是位置调节器相关应用的另一种控制方法的流程示意图;
26.图9为位置调节器相关应用的另一种控制方法的流程示意图,其中图9a示意调节器下电或进入休眠阶段,图9b示意位置调节器上电或唤醒阶段;图9c 示意位置调节器上电或唤醒阶段的又一方式;
27.图10是位置调节器的动作件在正常运行、与抵接部抵接时的霍尔(hall) 信号示意图;该方式的位置调节器包括霍尔元件,通过检测霍尔信号,系统进行判断,其中图10a示意位置调节器在正常运行,图10b、图10c、图 10d分别示意位置调节器的动作件与抵接部抵接的信号的示意图;图10b、图10c中抵接部与动作件抵接时两者中硬度不一样,抵接部与动作件抵接时不会引起动作件回弹或震动;图10d示意抵接部与动作件抵接时引起动作件回弹或具有一定震动;
28.图11示意位置调节器的电机正常运行、运行到动作件与抵接部抵接时的电流相或相关电信号的示意图,其中图11a示意正常运行,图11b示意抵接时;
29.图12示意位置调节器的电机正常运行、运行到动作件与抵接部抵接时的反电动势或相关电信号的示意图,其中图12a示意正常运行,图12b、图12c示意抵接时;
30.图13为位置调节器相关应用的又一种控制方法的流程示意图,其中图13a示意调节器下电或进入休眠阶段,图13b示意位置调节器上电或唤醒阶段;
31.图14为位置调节器相关应用的又一种控制方法的流程示意图,其中图14a示意调节器下电或进入休眠阶段,图14b示意位置调节器上电或唤醒阶段;。
具体实施方式
32.下面结合具体实施方式对技术方案进行说明,如图所示,图1是位置调节器所在控制系统的第一个实施例的模块示意图及通信连接示意图,该实施例的位置调节器20包括控制器23、动作执行机构200,位置调节器 20通过lin总线24与lin主节点即主控制器通信。控制器23包括收发模块25、处理模块26、电机驱动控制模块27、驱动模块28,位置调节器 20还包括检测模块29,动作执行机构200包括电机201、传动系统202、动作件203,电机具体可以是步进电机、直流有刷电机、直流无刷电机等各种类型电机,传动系统202可以不要,具体可以根据需要设置。
33.具体地,控制器23能通过lin总线24与主控制器通信,控制器23 的收发模块25接收通过lin总线24的信号,也能通过lin总线24发送相关的信号给主控制器,控制器23接收的信号提供给处理模块26,处理模块26处理后将相关的控制信号经电机驱动控制模块27给驱动模块28,从而控制执行机构200,具体可以驱动电机201,电机201带动动作件203 动作,电机201带动动作件203动作也包括通过传动系统202带动动作件 203动作;另外控制器23还可以包括检测模块29,检测模块29可以包括检测元件,检测元件可以安装在电机的固定部分或相对靠近电机的位置,以进行检测并将检测到的信号传送到处理模块26或将检测到的信号转换后传送到处理模块26,这样处理模块26可以得到相关的电机的状态。检测元件的一种方式可以采用霍尔元件,霍尔元件安装在电机的固定部分或靠近电机处,霍尔元件可以感应如磁转子的某一部位或磁环等,以感应电机相关的磁感应强度,将感应到的磁感应强度转化为电信号。霍尔元件的布置位置可以多种,如在一种电子膨胀阀,霍尔元件可以布置在电机的转子外侧,以感应转子转动;或者如一种控制阀,执行机构包括电机轴与齿轮传动系统,电机轴套设有磁环,霍尔元件靠近磁环布置如在磁环的下面。
34.图2是位置调节器所在控制系统又一个实施例的模块示意图及与主系统的通信连接示意图,位置调节器通过lin总线24与lin主节点即所在的主控制器通信;该实施例的位置调节器20包括控制器23、动作执行机构200。控制器23包括收发模块25、处理模块26、电机驱动控制模块27、驱动模块28、检测模块29,动作执行机构200包括电机201、传动系统202、动作件203,电机具体可以是步进电机、直流有刷电机、直流无刷电机等各种类型电机,传动系统202可以根据需要设置。
35.控制器23能通过lin总线24与主控制器通信,控制器23的收发模块25接收通过lin总线24传送的信号,也能通过lin总线24发送相关的信号给主控制器,控制器23接收的信号提供给处理模块26,处理模块 26处理后将相关的控制信号经电机驱动控制模块27控制驱动模块28,从而控制执行机构200,具体可以驱动电机201动作,电机201带动动作件 203动作,包括电机201通过传动系统202带动动作件203动作;检测模块29具体可以对驱动模块28进行检测并将检测到的信号传送到处理模块 26或将检测到的信号转换后传送到处理模块26,电机的状态能在驱动模块反应出来,这样处理模块26可以得到相关的电机的状态。具体地,可以包括:如通过检测电机的线圈电流或相关电信号的方式,检测线圈电流或相关电信号的方式主要适用于电机为直流电机(dc电机)或无刷直流电机 (bldc电机),这类电机运
行速度相对较高,电机堵和正常运行时的电流差别较大,堵的时候电流上升明显;另外是检测线圈反电动势或相关电信号的方式,主要适用于电机为无刷直流电机(bldc电机),这类电机运行速度较高,电机堵和正常运行时的反电动势bemf差别较大。如图2a、图 2b,图2a是检测线圈电流或相关电信号的一种局部电路示意图,以电机的一相线圈为例,图2b是检测反电动势或相关电信号的一种局部电路示意图。
36.如图2a所示,驱动模块28提供电信号给电机的线圈,检测模块291 包括采样电路(adc电路),具体包括采样电阻rs,本实施方式的驱动模块28包括4个开关管:q1、q2、q3、q4,当第一开关管q1和第四开关管q4导通,第二开关管q2和第三开关管q3关闭时,电流经第一开关管 q1流经电机线圈到第四开关管q4,并经采样电阻rs流回到地,构成回路,这样检测模块291可以得到采样电阻rs两端的电压,即可以得到线圈的电流,从而提供给处理模块26,处理模块26处理时可以是线圈的电流信号,也可以针对电压信号,即线圈的电流信号或其他相关的电信号,经模数转换后提供给处理模块26。
37.图2b所示的实施方式,给出了针对两相线圈电机检测的一种局部电路示意图。针对两相线圈的电机,两组线圈交替通电控制动作件动作,检测模块292包括采样模块293与模数转换模块294,检测其中不通电的那组线圈的反电动势,提供给处理模块26。
38.上面描述的方式中通过lin总线通信,另外也可以通过can总线通信,相应的通过can节点通信。
39.图3是另外一个实施例的位置调节器所在的控制系统的模块示意图,图中虚线部分示意检测模块检测的两种方式。控制系统包括控制器30与执行机构300,本实施例的控制器30不仅能控制位置调节器,还包括控制其他被驱动部品;位置调节器包括电控部分与执行机构300,位置调节器的电控部分作为控制器30的一部分或者说一部分功能。控制器30包括输入处理器31、收发模块33、处理模块32、电机驱动控制模块37、驱动模块 38、检测模块29。检测模块29的部分检测元件可以安装于电机或相对靠近电机的位置。控制系统30不仅控制位置调节器的执行机构,还可以控制其他被驱动部品的若干驱动器34,以用于控制被驱动部品的动作执行机构。收发模块33具体可以采用lin通信、can总线通信两者之一或其中两种。执行机构300包括电机301、传动系统302、动作件303,电机具体可以是步进电机、直流有刷电机、直流无刷电机等各种类型电机,传动系统302 可以根据需要选择设置。位置调节器的电控部分是控制系统30用于控制位置调节器的其中一部分功能模块,不单独设置,这样位置调节器的两部分分开设置,最后使用时结合使用。另外检测模块29也可以检测驱动模块得到电机的状态,参考图2所示的方式。
40.控制系统30能通过lin和或can总线通信,控制系统30的输入处理器31能接收开关信号和或传感器信号等,收发模块25接收通过lin总线和或can总线传送的信号,也能通过lin和或can总线发送相关的信号,接收的信号提供给处理模块32,处理模块32处理后将相关的控制信号经电机驱动控制模块37控制驱动模块38工作,从而控制执行机构300,具体可以驱动电机301动作,电机301带动动作件303动作,包括通过传动系统302带动动作件303动作;检测模块29具体可以对驱动模块38进行检测,或者对电机301进行检测,并将检测到的信号传送到处理模块32 或将检测到的信号转换后传送到处理模块32,这样处理模块32可以得到相关的电机的状态。
41.图4给出了位置调节器的动作件的运动方向的示意图及动作件与抵接部抵接的几
种方式的示意图;图4a和图4b示意出了有两个端点的位置调节器,这里的端点为虚拟的端点,主要是为描述清楚;其中图4a示意位置调节器的动作件运行轨迹为直线如上下动作或左右动作等,图4b示意位置调节器的动作件运行轨迹为曲线,如转动等动作或沿曲线导轨动作,两者运动到两端时都能与抵接部发生抵接。图4c和图4d示意出了包括一个端点的位置调节器,其中图4c示意位置调节器的动作件的运行轨迹为直线,图4d示意位置调节器的动作件的运行轨迹为曲线;这两者示意出位置调节器至少包括一个抵接部与动作件抵接。另外,给出的这些图只是便于对技术方案的理解,位置调节器的实际运行轨迹可以相对复杂,如可以是空间上的任意形状或者组合。上面所说端点只是为了描述方便而设置的虚拟点,只是说明到某一方向抵接时存在的状态。
42.图5是控制位置调节器的一种流程示意图,位置调节器具体可以如图 1或图2或图3所示,位置调节器具有两个抵接部或者说动作件的运动轨迹有两个端点,如图4a或图4b所示。这一实施方式对位置调节器上电或唤醒后动作件的位置没有要求,即动作件可以停在整个位置调节器动作范围的任意一个物理位置,在使用时可以通过初始化完成,本说明书的初始化或者称复位,具体流程包括:
43.51:位置调节器上电或唤醒。这时位置调节器的动作件的位置可以处于位置未知状态,即控制系统不知道位置调节器的动作件的物理位置,必要时可以发送“位置未知状态”的信息给处理模块或主控制器。或者说,本实施方式中,上次下电或进入休眠时可以不记录位置调节器的动作件的物理位置信息;
44.52:处理模块控制电机驱动控制模块,使位置调节器的动作件向第一端运动,或者说向第一抵接部方向运动,如图4a向第一抵接部a方向运动,或图4b向第一抵接部c方向运动;
45.53:通过或结合检测模块的信号,检测判断动作件是否已与抵接部相接触,如果动作件已与抵接部相接触,转步骤54,如果动作件未与抵接部相接触,转步骤52;
46.54:控制位置调节器的动作件向第二端运动,或者说向第二抵接部方向运动,如图4a向第二抵接部b方向运动,或图4b向第二抵接部d方向运动;
47.55:通过或结合检测模块的信号,检测判断动作件是否已与抵接部相接触,如果动作件已与抵接部相接触,转步骤56,如果动作件未与抵接部相接触,转步骤54;
48.56:对动作件从第一端向第二端运动的动作行程,判断是否在允许范围?或者说对动作件与第一抵接部抵接到与第二抵接部抵接的运动的动作行程,判断是否在允许范围?如果动作件在第一抵接部抵接到与第二抵接部的动作行程正常,转步骤58,如果动作件的动作行程超出正常范围,转步骤59;
49.58:复位子程序结束,更新当前位置调节器的位置信息,这样在接下来的控制中以此位置信息作为基准控制位置调节器工作;
50.59:复位失败,具体可以报警,如自动报警或向主控制器发出复位失败相关的信息。或重新再进行一次复位。
51.上述实施方式,每次上电或唤醒后进行一次初始化,或说复位,即进行全行程动作,在动作时经检测找到动作件受到抵接的两个位置,并更新位置信息,这样不管上次停在哪里,每次运行的位置都能相对正确,缺点是要先找到一个抵接位置,再找另一个,整个过程所需时间相对较长,如位置调节器上电时位置调节器的动作件相对靠近第二抵接部b,而
动作件仍然先向第一抵接部a抵接的方向运行,由于位置调节器上电时的“位置调节器的物理实际位置”和复位过程中位置调节器的运行之间没有进行匹配优化,这样,整个复位时间需要超过1个全行程运行时间。。位置调节器上电时的“位置调节器物理实际位置”,是指上一个上电周期(power cycle) 下电时位置调节器最终停止的位置,一般情况下停电后该位置不会改变,该位置可以由控制位置调节器的主控制器(ecu)来控制。如图1、图2 所示,处理模块26(ecu)通过lin总线与主控制器交互,位置调节器的处理模块接收信号实施控制。如图3所示,该主控制器30集成了位置调节器电控这一部分,主控制器30可以直接控制位置调节器的执行机构300。
52.下面介绍另外一个实施方式,请参图6。图6是位置调节器相关应用的又一种流程示意图,其中图6a示意位置调节器下电或休眠阶段,图6b示意位置调节器上电或唤醒阶段。位置调节器具体可以如图1或图2或图3 所示,位置调节器具有两个抵接部或者说运动轨迹有两个端点,如图4a 或图4b所示。具体流程包括下电或休眠阶段与上电或唤醒阶段两个子流程,下电或休眠阶段用于位置调节器准备下电或进入休眠阶段,包括:
53.611:处理模块控制电机驱动控制模块,使位置调节器的动作件向其中一端运动,或者说向第一抵接部方向运动,如图4a向第一抵接部a方向运动,或图4b向第一抵接部c方向运动;
54.612:通过或结合检测模块的信号,检测判断动作件是否已与抵接部相接触,如果动作件已与抵接部相接触,转步骤613,如果动作件未与抵接部相接触,转步骤611;
55.613:控制电机驱动控制模块控制位置调节器的动作件向另一端如第二端运动预设步数或预设距离,或者说向第二抵接部方向运动,如图4a向第二抵接部b方向运动预设步数或预设距离,或图4b向第二抵接部d方向运动预设步数或预设距离;预设步数或预设距离一般相对整个行程较小,预设步数或预设距离不大于整个动作行程的三分之一,甚至不大于整个动作行程的五分之一甚至十分之一,主要是为避免动作件较长时间与抵接部抵接;
56.614:更新位置调节器的位置信息,存储到存储器(nvram);
57.615:位置调节器下电或进入休眠阶段。
58.上电或唤醒阶段包括:
59.621:位置调节器上电或唤醒。由于下电时更新了位置调节器的位置信息,存储在存储器(nvram),这时位置调节器的动作件的位置是明确的,控制系统默认位置调节器的动作件仍在下电时停留的物理位置;
60.622:处理模块控制电机驱动控制模块控制位置调节器的动作件向靠近的那一端运动,或者说向靠近的抵接部方向运动,如图4a向第一抵接部a 方向运动,或图4b向第一抵接部c方向运动;
61.623:通过或结合检测模块的信号,检测判断动作件是否已与抵接部相接触,如果动作件已与抵接部相接触,转步骤624,如果动作件未与抵接部相接触,转步骤622;
62.624:控制位置调节器的动作件向另一端如第二端运动,或者说向另一个抵接部如第二抵接部运动,如图4a向第二抵接部b方向运动,或图4b 向第二抵接部d方向运动;
63.625:通过或结合检测模块的信号,检测判断动作件是否已与抵接部相接触,如果动作件已与抵接部相接触,转步骤626,如果动作件未与抵接部相接触,转步骤624;
64.626:动作件从第一端向第二端运动的动作行程,判断是否正常即是否在允许范
围?或者说对动作件与第一抵接部抵接到与第二抵接部抵接的运动的动作行程,判断是否在允许范围?如果动作件在第一抵接部抵接到与第二抵接部的动作行程正常,转步骤627,如果动作件的动作行程超出正常范围,转步骤628;
65.627:复位子程序结束,更新当前位置调节器的位置信息,经复位可以判断位置调节器的运行情况正常,并可以得到正确的当前位置信息,这样在接下来的控制中可以此位置信息作为基准控制位置调节器工作;
66.628:复位失败,具体可以报警,如自动报警或向主控制器发出复位失败相关的信息。或重新再进行一次复位。
67.这一方案在复位时,由于动作件停在相对靠近其中的一抵接部,在运行时所需时间可以相对缩短,整个复位过程相对较快。
68.下面介绍另外一个实施方式,参图7。图7是控制位置调节器应用的又一种流程示意图,图7a示意调节器下电或休眠阶段,图7b示意位置调节器上电或唤醒阶段;这种方式适用于位置调节器可以长期停在与抵接部抵接状态的产品。位置调节器具体可以参图1或图2或图3所示,位置调节器具有两个抵接部或者说运动轨迹有两个端点,如图4a或图4b所示。流程包括下电或休眠阶段与上电或唤醒阶段两个子流程,下电或休眠阶段用于位置调节器准备下电或进入休眠阶段,包括:
69.711:控制电机驱动控制模块,使位置调节器的动作件向其中一端如第一端运动,或者说向一个抵接部如第一抵接部方向运动,如图4a向第一抵接部a方向运动,或图4b向第一抵接部c方向运动;
70.712:通过或结合检测模块的信号,检测判断动作件是否已与抵接部相接触,如果动作件已与抵接部相接触,转步骤713,如果动作件未与抵接部相接触,转步骤711;
71.713:更新位置调节器的位置信息,存储到存储器(nvram);
72.714:位置调节器下电或进入休眠阶段。
73.上电或唤醒阶段包括:
74.721:位置调节器上电或唤醒。由于下电时更新了位置调节器的位置信息,存储在存储器(nvram),这时位置调节器的动作件的位置是相对明确的,控制系统默认位置调节器的动作件位于下电时的物理位置;
75.722:控制位置调节器的动作件向另一端如第二端运动,或者说向另一个抵接部如第二抵接部方向运动,如图4a向第二抵接部b方向运动,或图4b向第二抵接部d方向运动;
76.723:通过或结合检测模块的信号,判断动作件是否已与抵接部相接触,如果动作件已与抵接部相接触,转步骤724,如果动作件未与抵接部相接触,转步骤722;
77.724:对动作件从第一端向第二端运动的动作行程,判断是否正常即是否在允许范围?或者说对动作件与第一抵接部抵接到与第二抵接部抵接的运动的动作行程,判断是否在允许范围?如果动作件在第一抵接部抵接到与第二抵接部的动作行程正常,转步骤725,如果动作件的动作行程超出正常范围,转步骤726;
78.725:复位子程序结束,更新当前位置调节器的位置信息,经复位可以判断位置调节器的运行情况正常,并可以得到正确的当前位置信息,这样在接下来的控制中可以此位置信息作为基准控制位置调节器工作;
79.726:复位失败,具体可以报警,如自动报警或向主控制器发出复位失败相关的信
息。或重新再进行一次复位。
80.这一方案在复位时,由于动作件停在与其中的一抵接部抵接处,在复位运行时只需要运行一个单向行程,所需时间可以相对缩短,整个复位过程相对较快。但位置调节器的动作件要满足能与抵接部相抵接。
81.上面介绍的实施方式适用于位置调节器有两个端点,或者说会有两个抵接位置的情况。下面介绍另外实施方式,参图8,图8是控制位置调节器的另一种控制方法的流程示意图;这一方案可应用于一个端点,或者说一个抵接位置的情况,也可以用于两个端点的情况,能满足复位只需要实现位置基准标定的应用,可以进一步降低复位所需的时间。具体包括:
82.80:位置调节器上电或唤醒。这时位置调节器的动作件的位置可以处于位置未知状态,即控制系统不知道位置调节器的动作件的物理位置;或者说,本实施方式中,上次下电或进入休眠时可以不记录位置调节器的动作件的位置信息;
83.81:发送“位置未知状态”的信息给处理模块或主控制器;本步骤可选择,即可以不要;
84.82:lin主节点或主控制器发控制命令给位置调节器;
85.83:控制电机驱动控制模块,使位置调节器的动作件向其中一端如第一端运动,或者说向一个抵接部方向运动,如图4a向第一抵接部a方向运动,或图4b向第一抵接部c方向运动,或图4c向抵接部e方向运动,或图4d向抵接部f方向运动;
86.84:通过或结合检测模块的信号,判断动作件是否在运行最大行程前 (包括运行最大行程)已与抵接部相接触,如果动作件在运行最大行程前已与抵接部相接触,转步骤85;如果动作件运行最大行程仍未与抵接部相接触,说明位置调节器运行情况不正常,复位失败,具体可以报警,如自动报警或向主控制器发出复位失败相关的信息;或重新再进行一次复位;
87.85:更新当前位置调节器的位置信息,这样在接下来的控制中能以此位置信息作为基准控制位置调节器工作,复位子程序结束。
88.这一方式仍能找到相对准确的位置基准,且复位运行所需时间相对较短。
89.下面介绍另一实施方式,请参图9。图9为控制位置调节器应用的又一控制方法的流程示意图,图9a示意调节器下电或休眠阶段,图9b示意位置调节器上电或唤醒阶段;下电或休眠阶段包括:
90.911:控制电机驱动控制模块,使位置调节器的动作件向其一端如第一端运动,或者说向一个抵接部如第一抵接部方向运动,如图4a向第一抵接部a方向运动,或图4b向第一抵接部c方向运动;
91.912:通过或结合检测模块的信号,检测判断动作件是否已与抵接部相接触,如果动作件已与抵接部相接触,转步骤913,如果动作件未与抵接部相接触,转步骤911;
92.913:更新位置调节器的位置信息,存储到存储器(nvram);
93.914:位置调节器下电或进入休眠阶段。
94.上电或唤醒阶段包括:
95.921:位置调节器上电或唤醒。由于下电时更新了位置调节器的位置信息,存储在存储器(nvram),这时位置调节器的动作件的位置是相对明确的,即控制系统知道下电时位
置调节器的动作件的物理位置;同样系统默认这是当前位置;
96.922:控制位置调节器的动作件向另一端如第二端运动,或者说向另一个抵接部如第二抵接部方向运动,如图4a向第二抵接部b方向运动,或图4b向第二抵接部d方向运动;
97.923:通过检测模块,检测判断动作件是否在最大行程前与抵接部相接触,如果是,转步骤924,如果在最大行程动作件未与抵接部相接触,转步骤925;
98.924:复位子程序结束,更新当前位置调节器的位置信息,经复位可以判断位置调节器的运行情况正常,并可以得到正确的当前位置信息,这样在接下来的控制中可以此位置信息作为基准控制位置调节器工作;
99.925:复位失败,具体可以报警,如自动报警或向主控制器发出复位失败相关的信息。或重新再进行一次复位。
100.这一实施方式还可以如图9c,图9c为上电阶段的又一实施方式,与图9b的区别在于:步骤922中是向与原来下电时停的另一方向动作,而改为向与原来下电时相对靠近或直接抵接的同一端即同一抵接部动作,这样,上电后能更加快速的进入正常运行状态,相对减少了复位的时间。这一方式可以单独作为一个实施方式使用,也可以与图9a相结合,即在下电时使动作件与抵接部相抵接,上电时,可以直接或迅速达到与抵接部抵接的状态,即如果只有一个抵接部,上电时使其向与抵接部抵接的方向动作,如果有两个抵接部,上电时使其向相对靠近的一个抵接部抵接的方向动作。
101.上电或唤醒阶段的步骤包括:
102.931:位置调节器上电或唤醒。由于下电时更新了位置调节器的位置信息,存储在存储器(nvram),这时位置调节器的动作件的位置是相对明确的,即控制系统知道下电时位置调节器的动作件的物理位置;同样系统默认这是当前位置;
103.932:控制位置调节器的动作件向与抵接部抵接的方向动作或向靠近的抵接部或抵接的抵接部一端如第一端运动,或者说向第一抵接部方向运动。如图4a向第一抵接部a方向运动,或图4b向第一抵接部c方向运动;
104.933:通过检测模块,检测判断动作件是否在最大行程前与抵接部相接触,如果是,转步骤924,如果在最大行程动作件未与抵接部相接触,转步骤925;
105.934:复位子程序结束,更新当前位置调节器的位置信息,经复位可以判断位置调节器的运行情况正常,并可以得到正确的当前位置信息,这样在接下来的控制中可以此位置信息作为基准控制位置调节器工作;
106.935:复位失败,具体可以报警,如自动报警或向主控制器发出复位失败相关的信息。或重新再进行一次复位。
107.下面介绍检测判断的几种实施方式,在系统采用霍尔元件时,动作件与抵接部相抵接可能的信号参图10。图10是位置调节器的动作件在正常运行、与抵接部抵接时的霍尔(hall)信号示意图;该方式的位置调节器包括霍尔元件,通过检测霍尔信号进行判断,其中图10a示意位置调节器正常运行,图10b、图10c、图10d分别示意位置调节器的动作件与抵接部抵接的方式;图10b、图10c中抵接部与动作件抵接时两者中硬度不一样,抵接部与动作件抵接时不会引起动作件回弹或震动;图10d示意抵接部与动作件抵接时引起动作件回弹或具有一定震动。
108.当用霍尔元件作为检测用元件来感测电机的转动情况,电机正常运行时输出的霍
尔信号如图10a所示,当位置调节器的动作件与抵接部抵接时,位置调节器的电机所产生的对应的霍尔信号可能会如图10b~10c所示,即根据动作件与抵接部抵接的情况不同可能出现不同的信号特征,如图10b 或图10c的实施方式,出现持续的高电平或持续的低电平,流量控制用阀,动作件与抵接部之间如有一者的材料相对较软,两者抵接后不会出现回弹或抖动的情况,如动作件采用转动式动作,而用于抵接的部位装有一个塑料件作为抵接部等。而在两者都用材质接近的金属材料时,动作件与抵接部两者接触时可能会有反弹,如电子膨胀阀,换接时产生的对应的霍尔信号如图10d所示,即可能出现不规则的高低电平跳变。图中的2t、2.5t 分别是检测的时间周期的示意。实际使用时,霍尔元件可以安装在执行机构如靠近电机的位置,通过检测到霍尔信号的变化,来判断是否已到端点或者说动作件是否与抵接部抵接。这是检测模块采用霍尔元件,并通过检测电机的霍尔信号的其中一种实施方式的示意。这一方法适用于能直接通过在产品电机转子附近安装霍尔元件感测其转子磁场变化的位置调节器,比如采用步进电机的电子膨胀阀,霍尔元件或安装在磁转子附近,或采用无刷直流电机(bldc)的控制阀类产品,可以让转动轴或转子传动带动磁环,霍尔元件可以检测电机转子磁场或磁环磁场的变化,可判断得出动作件的运行状态。
109.另外,检测模块还可以通过对电机电流是否偏离正常值(或范围)来进行检测与判断。参图11,图11示意位置调节器的电机正常运行、运行到端点与抵接部抵接时的电流示意图,图11a示意正常运行,图11b示意抵接时,动作件抵接时其电流会超过正常运行的上阈值,该方案适用于电机为直流电机(dc电机)或无刷直流电机(bldc电机)的控制阀类的位置调节器,这类电机运行速度相对较高,动作件抵接时和正常运行时的电流差别相对较大,动作件抵接时电机的电流上升明显;动作件与抵接部之间如有一者的材料相对较软,两者抵接后不会出现回弹或抖动的情况。检测模块的部分电路请参图2a,通过检测直流电机(dc电机)或无刷直流电机的线圈的电流的变化,一般在电机正常运行时,得到的电流在上阈值以下,而在动作件与抵接部抵接时,得到的电流会在上阈值以上,从而可以得出电机的相应的状态。另外,也可以通过检测采样电阻rs两端的电压的变化,来进行判断,由于一个固定的检测模块中,采样电阻rs确定后,采样电阻rs两端的电压与电流成正比,在具体的系统中,可以通过运算电流进行判断也可以通过电压或其他相关量进行判断,如与电流相关的电量或数字信号,即本方案的检测模块涉及的是电机的线圈的电流或其相关量。
110.另外,检测模块还可以通过对电机反电动势bemf或其相关量是否偏离正常值,或检测模块通过对电机反电动势bemf或其相关量是否超出设定阈值来进行检测与判断,参图12与图2b,图2b示意检测部分的局部电路,图12示意位置调节器的电机正常运行、运行到端点与抵接部抵接时的反电动势或其相关量的示意图,图12a示意正常运行,图12b示意动作件与抵接部抵接时存在回弹现象的一种方式,图12c示意动作件与抵接部抵接时不存在回弹现象的一种方式,其中横坐标代表时间,纵坐标代表反电动势或其相关量。这一检测方法主要适用于采用无刷直流电机(bldc电机)的产品,如采用无刷直流电机(bldc电机)的控制阀类的位置调节器产品,这类电机运行速度相对较高,电机在抵接不动作时和正常运行时的反电动势差别相对较大,另外还可应用于使用步进电机的电子膨胀阀或类似位置调节器产品。图中的bemf可以是反电动势,也可以为反电动势相关的电量或数字信号,如与反电动势相关的ad采样结果,也可以是实际电压值。在具体的系统中,可以通过电机的反电动势进行判断也可以通过反电动势的相关量进行判断,如与反电动势相关的电量或数字信号,即
本方案的检测模块涉及的是电机的反电动势或其相关量。具体地,针对动作件存在回弹的情况,可以通过反电动势或其相关量是否存在突然增大又变小直至小于下阈值,来判断是否到端点或发生抵接,如图12b;针对动作件不存在回弹的情况,可以通过反电动势或其相关量是否变小直至小于下阈值,来判断是否到端点或发生抵接,如图12c。
111.对于安装霍尔元件的位置调节器,不论采用哪种电机,都可以通过监测电机正常运行的霍尔信号的变化获取到电机运行速度,处理模块能够获取到运行时间,从而进行判断运行行程是否满足产品规格要求或者说电机的整个运行行程是否正常。
112.对于没有安装霍尔元件的位置调节器,如果采用步进电机,处理模块结合步进电机定子线圈的电流换相信息和该步进电机情况(比如转子级对数),可以知道运行距离。如果采用无刷直流电机,除了类似步进电机方案中用到的信息,处理模块还可以结合对反电动势或其相关量的检测来监测电机转子换相次数、及电机状态。如果采用直流电机,电机速度主要受线圈上电流大小影响,对于对行程公差并不敏感的场合,可以基于线圈电流值来推算运行速度,进而得到运行距离。
113.具体地,一种用于流量控制的位置调节器,动作件能在两个位置之间转动,图中的4t的时间为120ms,这样一次端点检测时间一般不超过0.1s,而从一个端点到另一个端点的运行时间在3s-10s之间;在另一用于流量控制的位置调节器,动作件类似于活塞式上下两个位置之间动作,从一个端点到另一个端点的运行时间在3s;另一用于节流的位置调节器,动作件从一个端点到另一个端点的运行时间在3s,另一用于节流的位置调节器,动作件从一个端点到另一个端点的运行时间在5s。因此,在位置调节器上电后进行检测、复位会需要一定的时间,下面介绍另外两种实施方式,参图 13、图14,可以使复位时间相对较短。
114.图13是控制位置调节器应用的又一种流程示意图,其中图13a示意位置调节器下电或休眠阶段,图13b示意位置调节器上电或唤醒阶段。位置调节器可以如图1或图2或图3所示,位置调节器具有两个抵接部或者说运动件有两个相抵接的虚拟的端点,如图4a或图4b所示。具体流程包括下电或进入休眠阶段与上电或唤醒阶段两个子流程,下电或进入休眠阶段包括:
115.311:处理模块控制电机驱动控制模块,使位置调节器的动作件向第一端如第一端运动,或者说向与一个抵接部如第一抵接部抵接的方向运动,如图4a向第一抵接部a方向运动,或图4b向第一抵接部c方向运动;
116.312:通过或结合检测模块的信号,检测判断动作件是否已与抵接部相接触,如果动作件已与抵接部相接触,转步骤313,如果动作件未与抵接部相接触,转步骤311;
117.313:控制电机驱动控制模块,使位置调节器的动作件向第二端运动,或者说向与第二抵接部抵接的方向运动,如图4a向第二抵接部b方向运动,或图4b向第二抵接部d方向运动;
118.314:通过或结合检测模块,检测判断动作件是否已与抵接部相接触,如果动作件已与抵接部相接触,转步骤315,如果动作件未与抵接部相接触,转步骤313;
119.315:控制位置调节器的动作件向第一端运动预设步数或预设距离,预设步数或预设距离一般相对整个行程较小,主要是为避免动作件较长时间与抵接部抵接;
120.316:对动作件从第一端向第二端运动的动作行程,判断是否正常,即是否在允许范围?或者说对动作件与第一抵接部抵接到与第二抵接部抵接的运动的动作行程,判断是
否在允许范围?如果动作件在第一抵接部抵接到与第二抵接部的动作行程正常,转步骤317,如果动作件的动作行程超出正常范围,转步骤318;
121.317:位置调节器下电或进入休眠阶段;或者可以更新位置调节器的位置信息,存储在存储器(nvram);
122.318:说明位置调节器可能存在故障,复位失败,具体可以报警,如自动报警或向主控制器发出复位失败相关的信息;或重新复位。
123.上电或唤醒阶段包括:
124.321:位置调节器上电或唤醒。由于下电时位置调节器的动作件相对靠近第二端,或者位置信息存储在存储器(nvram),控制系统知道下电时位置调节器的动作件的物理位置;
125.322:处理模块控制位置调节器的动作件向靠近的第二端运动,或者说向靠近的抵接部方向运动,如图4a向第二抵接部b方向运动,或图4b向第二抵接部d方向运动;
126.323:通过或结合检测模块,检测判断动作件是否已与抵接部相接触,如果动作件已与抵接部相接触,转步骤324,如果动作件未与抵接部相接触,转步骤322;
127.324:更新当前位置调节器的位置信息,转入正常运行。
128.这一方案在重新上电或开始工作时,由于动作件停在相对靠近与抵接部抵接的位置,在运行时所需时间可以相对缩短,整个复位过程相对较快,能更好地满足系统快速运行的需要。
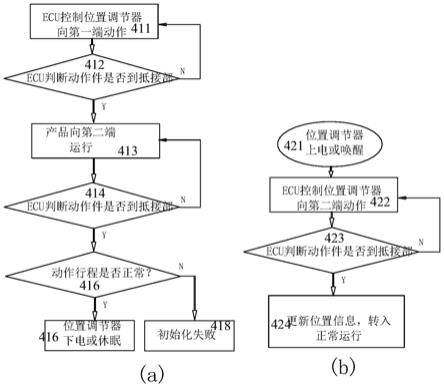
129.图14是控制位置调节器应用的又一流程示意图,其中图14a示意位置调节器下电或休眠阶段,图14b示意位置调节器上电或唤醒阶段。位置调节器可以如图1或图2或图3所示,位置调节器具有两个抵接部或者说运动轨迹包括虚拟的两个端点,如图4a或图4b所示。具体流程包括下电或休眠阶段与上电或唤醒阶段两个子流程,下电或休眠阶段包括:
130.411:处理模块控制电机驱动控制模块控制位置调节器的动作件向第一端运动,或者说向一个抵接部如第一抵接部方向运动,如图4a向第一抵接部a方向运动,或图4b向第一抵接部c方向运动;
131.412:通过或结合检测模块,判断动作件是否已与抵接部相接触,如果动作件已与抵接部相接触,转步骤413,如果动作件未与抵接部相接触,转步骤411;
132.413:控制电机驱动控制模块,使位置调节器的动作件向第二端运动,或者说向第二抵接部方向运动,如图4a向第二抵接部b方向运动,或图 4b向第二抵接部d方向运动;
133.414:通过或结合检测模块,检测判断动作件是否已与抵接部相接触,如果动作件已与抵接部相接触,转步骤416,如果动作件未与抵接部相接触,转步骤413;
134.416:对动作件从第一端向第二端运动的动作行程,判断是否正常,即是否在允许范围?或者说对动作件与第一抵接部抵接到与第二抵接部抵接的运动的动作行程,判断是否在允许范围?如果动作件在第一抵接部抵接到与第二抵接部的动作行程正常,转步骤417,如果动作件的动作行程超出正常范围,转步骤418;
135.417:位置调节器下电或进入休眠阶段;或者可以更新位置调节器的位置信息,存储在存储器(nvram);
136.418:说明位置调节器可能存在故障,复位失败,具体可以报警,如自动报警或向主控制器发出复位失败相关的信息;或重新复位。
137.上电或唤醒阶段包括:
138.421:位置调节器上电或唤醒。由于下电时位置调节器的动作件位于第二端或与第二抵接部抵接,或者位置信息存储在存储器(nvram),下电时位置调节器的动作件的位置是明确的,即控制系统知道下电时位置调节器的动作件的物理位置;
139.422:处理模块控制位置调节器的动作件向靠近的第二端运动,或者说向靠近的第二抵接部方向运动,如图4a向第二抵接部b方向运动,或图 4b向第二抵接部d方向运动;这一步主要是为下电到上电的这段时间动作件是否可能因震动等原因产生位移;
140.423:通过检测模块,检测判断动作件是否已与抵接部相接触,如果动作件已与抵接部相接触,转步骤424,如果动作件未与抵接部相接触,转步骤422;
141.424:更新当前位置调节器的位置信息,以当前的位置信息作为位置基准,系统转入正常运行。或者也可以以当前的位置信息作为位置基准,系统运行到初始工作位置并转入正常运行。
142.这一方案在重新上电或开始工作时,由于动作件停在与其中的一抵接部抵接的位置,在运行时所需时间可以进一步缩短,整个复位过程相对较快,能更好地满足系统快速运行的需要。图13、图14所示的实施例在下电阶段进行了完整复位过程,另外,也可以简化为下电阶段只进行定位,即下电阶段不检测行程,而只是控制动作件往其中一个抵接部抵接的方向运动的方式,与图7、图9所示实施方式类似,即只往其中一个端点动作的方式,动作流程这里不再复述。
143.需要说明的是:以上实施方式仅用于说明本发明而并非限制本发明所描述的技术方案,例如对流程中的数字排序,只是为了说明清楚,不应视作对流程先后的限定。尽管本说明书参照上述的实施方式对本发明已进行了详细的说明,但是,本领域的普通技术人员应当理解,所属技术领域的技术人员仍然可以对本发明进行修改、结合或者等同替换,而一切不脱离本发明的精神和范围的技术方案及其改进,均应涵盖在本发明的权利要求范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

