1.本发明属于火灾预警检测技术领域,具体涉及一种无人机火灾实时监测方法和系统。
背景技术:
2.森林火灾是破坏森林最主要的灾害,位居首位,森林火灾的发生,直接危及林木、林下植物、土壤以及动物的生存,同时又使人类的生命财产和森林生态环境造成了巨大的危害。森林火灾容易失去控制,随着蔓延扩展,带来危害和生命财产损失,有突发性强、破坏性大、过火面积大、救助困难等特点。所以,需要发现森林火情,及时发出报警,准确监控火场面积以及燃烧的植被种类。发现自己处在森林火场中,监控系统可以辅助救援决策,辅助向安全地带迅速转移。基于机器视觉的无人机可用于发现森林火情,能对森林火灾进行及时的预警与预测。
3.随着无人机技术的创新和普及,其精准、直观的火场分析数据的特点,使无人机进行森林防火巡查成为趋势,但是现有技术中的无人机火灾实时监测中,如中国专利申请201711041054.2、201810355249.2均是围绕如何发现火灾,并提醒安防系统进行火灾处置,却忽略了无人机在飞行至火灾发生区域后,如何能够有效采集火灾发生险情的图像信息的同时,避免进入火灾发生严重的区域,进而避免被险情严重的火势所引发的无人机着火或坠毁。
4.因此,急需一种能够规划无人机在接收到火灾发生区域的报警信号后,能够在安全范围的航行轨迹或轨道内进行火灾险情实时监测和数据采集,避免被火势引火进而坠毁的无人机火灾实时监测方法和系统。
技术实现要素:
5.本发明针对上述缺陷,提供一种能够规划无人机在接收到火灾发生区域的报警信号后,自行规划飞行路径,进而在最短时间内到达火灾发生区域,并且能够进一步再规划如何能够既保证采集到完全、清晰、全面的火灾险情图像和温度、气压、烟雾、火光等数据信息的同时,能够在安全范围的航行轨迹或轨道内进行火灾险情实时监测和数据采集,避免被火势引火进而坠毁的无人机火灾实时监测方法和系统。
6.本发明提供如下技术方案:一种无人机火灾实时监测方法,包括以下步骤:
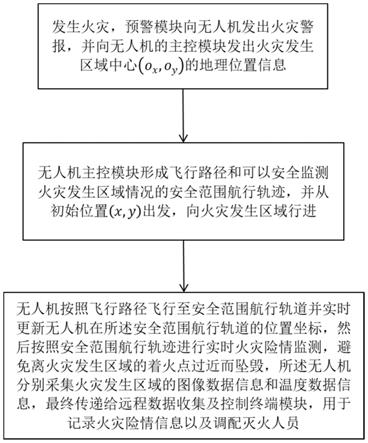
7.s1:发生火灾时,布控在被监测区域的预警模块向无人机发出火灾警报,并向无人机的主控模块发出火灾发生区域中心(o
x
,o
y
)的地理位置信息;
8.s2:无人机主控模块接收到所述火灾发生区域中心(o
x
,o
y
)的地理位置信息后形成飞行路径和可以安全监测火灾发生区域情况的安全范围航行轨道,并从初始位置(x,y)出发,向火灾发生区域行进;
9.s3:无人机按照所述步骤s2形成的飞行路径飞行至所述安全范围航行轨道并实时更新无人机在所述安全范围航行轨道的位置坐标,然后按照步骤s2构建的安全范围航行轨
道进行实时火灾险情监测,避免离火灾发生区域的着火点过近而坠毁,所述无人机分别采集火灾发生区域的图像数据信息和温度数据信息,传递给主控模块后,主控模块通过无线通信模块传输给远程数据收集及控制终端模块,远程数据收集及控制终端模块记录火灾险情信息以及调配灭火人员。
10.进一步地,所述s2步骤,包括以下步骤:
11.s21:无人机主控模块根据接收到的所述火灾发生区域中心(o
x
,o
y
)的地理位置信息以及gps模块实时定位到的初始位置(x,y)构建安全范围航行轨道模型:
[0012][0013]
其中,安全范围航行轨道为一个以火灾发生区域中心为圆心的、半径为r的圆;o
x
为火灾发生区域中心的横坐标,o
y
为火灾发生区域中心的纵坐标;x为所述无人机的初始位置的横坐标,y为所述无人机的初始位置的纵坐标;
[0014]
s22:构建无人机飞行初始位置至安全范围航行轨道的实时飞行路径模型:
[0015]
x
t 1
=x
t
v cosα;
[0016]
y
t 1
=y
t
v sinα;
[0017]
其中,x
t
为t时刻无人机飞行所在位置的横坐标,y
t
为t时刻无人机飞行所在位置的纵坐标;x
t 1
为t 1时刻无人机飞行所在位置的横坐标,y
t 1
为t 1时刻无人机飞行所在位置的纵坐标;v为t 1时刻与t时刻无人机飞行所在位置两点之间的距离;α为火灾发生区域中心(o
x
,o
y
)至初始位置(x,y)连线与初始位置(x,y)所在水平线之间的夹角。
[0018]
进一步地,当无人机沿所述步骤s22构建的实时飞行路径模型到达所述步骤s21构建的模型的安全范围航行轨道后,沿安全范围航行轨道飞行进行实时火灾险情监测,主控模块实时更新无人机沿所述安全范围航行轨道飞行的坐标点更新算法为:
[0019][0020][0021]
其中,λ为第i时刻轨道安全范围航行轨道坐标点与第i
‑
1时刻的轨道安全范围航行轨道坐标点的步进角;β为α的共轭角。
[0022]
进一步地,所述无人机初始位置的纵坐标y与所述无人机初始位置的横坐标x成线性关系:
[0023]
y=mx n
[0024]
其中m为所述无人机初始位置的纵坐标y随所述无人机初始位置的横坐标x变化的线性系数,n为所述无人机初始位置的纵坐标y相对于所述无人机初始位置的横坐标x的调整点值。
[0025]
本发明还提供采用上述方法的无人机火灾实时监测系统,包括无人机惯性测量模块、rgb彩色相机模块、ros温度传感器模块、gps实时定位模块、主控模块、无线通信模块、远程数据收集及控制终端模块;
[0026]
所述无人机惯性测量模块,用于实时定位所述无人机在飞行过程中的无人机的行进方向和三维速度;
[0027]
所述gps实时定位模块用于实时定位无人机在飞行过程中的地理位置信息;
[0028]
所述主控模块,用于主控模块接收到所述火灾发生区域中心(o
x
,o
y
)的地理位置信息后形成飞行路径和可以安全监测火灾发生区域情况的安全范围航行轨道并实时更新无人机沿所述安全范围航行轨道飞行的坐标点
[0029]
所述rgb彩色相机模块,用于实时采集火灾发生区域的图像数据信息;
[0030]
所述ros温度传感器模块,用于实时采集火灾发生区域的温度数据信息;
[0031]
所述无线通信模块,用于将所述主控模块采集到的火灾发生区域的图像数据信息和温度数据信息传输给所述远程数据收集及控制终端模块;
[0032]
所述远程数据收集及控制终端模块,用于记录火灾险情信息以及调配灭火人员。
[0033]
进一步地,所述无线通信模块采用mavlink无人机通讯协议。
[0034]
进一步地,所述系统还包括气压检测传感器模块、烟雾检测传感器模块、感光传感器模块。
[0035]
进一步地,所述rgb彩色相机模块为采用非接触式红外传感器的热敏多光谱相机。
[0036]
进一步地,所述热敏多光谱相机的分辨率为2064
×
1544。
[0037]
本发明的有益效果为:
[0038]
1、本发明提供的无人机火灾实时监测方法,能够在接收到布控在被监测区域的预警模块向无人机发出火灾警报后,通过无人机自主带有的主控模块根据接收到所述火灾发生区域中心(o
x
,o
y
)的地理位置信息规划最短的飞行路径模型,进而可以有效地避免在飞行过程中浪费的时间,第一时间赶赴火灾发生现场,进行火灾实时监测。
[0039]
2、本发明提供的无人机火灾实时监测方法,能够根据规划的飞行路径到达火灾发生区域后,能够自主建模,形成一个具有以火灾发生区域中心(o
x
,o
y
)为中心的圆形安全范围航行轨道,按照构建的安全范围航行轨道进行实时火灾险情监测并实时更新无人机在所述安全范围航行轨道的位置坐标,避免离火灾发生区域的着火点过近而坠毁,所述无人机分别采集火灾发生区域的图像数据信息和温度数据信息,既保证采集到完全、清晰、全面的火灾险情图像和温度、气压、烟雾、火光等数据信息的同时,能够在安全范围的航行轨迹或轨道内进行火灾险情实时监测和数据采集,传递给主控模块后,主控模块通过无线通信模块传输给远程数据收集及控制终端模块,远程数据收集及控制终端模块记录火灾险情信息以及调配灭火人员。
[0040]
3、本技术提供的无人机火灾实时监测系统配备有采用非接触式红外传感器的热敏多光谱相机的ros彩色相机模块,能够清晰传递火灾发生区域的险情图像的同时可以作为温度传感器采集火灾发生区域的温度,并且再进一步配备气压检测传感器模块、烟雾检测传感器模块、感光传感器模块,可以有效全方位立体化的监测火灾发生区域的险情情况各方面的数据信息,进而可以向应急小组提供火灾和周围环境的有用信息。
附图说明
[0041]
在下文中将基于实施例并参考附图来对本发明进行更详细的描述。其中:
[0042]
图1为本发明提供的无人机火灾实时监测方法流程示意图;
[0043]
图2为本发明实施例2提供的无人机火灾实时监测方法中主控模块构建的安全范围航行轨道示意图;
[0044]
图3为本发明实施例2提供的无人机火灾实时监测方法中无人机沿着主控模块构建的飞行路径朝着安全范围航行轨道飞行的示意图;
[0045]
图4为本发明实施例3提供的无人机火灾实时监测系统结构示意图;
[0046]
图5为本发明实施例4提供的无人机火灾实时监测系统结构示意图。
[0047]
具体实施例方式
[0048]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0049]
实施例1
[0050]
本实施例提供一种无人机火灾实时监测方法,如图1所示,包括以下步骤:
[0051]
s1:发生火灾时,布控在被监测区域的预警模块向无人机发出火灾警报,并向无人机的主控模块发出火灾发生区域中心(o
x
,o
y
)的地理位置信息;
[0052]
s2:无人机主控模块接收到火灾发生区域中心(o
x
,o
y
)的地理位置信息后形成飞行路径和可以安全监测火灾发生区域情况的安全范围航行轨道,并从初始位置l出发,向火灾发生区域行进;初始位置l的坐标为(x,y);
[0053]
s3:无人机按照步骤s2形成的飞行路径飞行至安全范围航行轨道并实时更新无人机在安全范围航行轨道的位置坐标,然后按照步骤s2构建的安全范围航行轨道进行实时火灾险情监测,避免离火灾发生区域的着火点过近而坠毁,无人机分别采集火灾发生区域的图像数据信息和温度数据信息,传递给主控模块后,主控模块通过无线通信模块传输给远程数据收集及控制终端模块,远程数据收集及控制终端模块记录火灾险情信息以及调配灭火人员。
[0054]
无人机初始位置的纵坐标y与无人机初始位置的横坐标x成线性关系:
[0055]
y=mx n
[0056]
其中m为无人机初始位置的纵坐标y随无人机初始位置的横坐标x变化的线性系数,n为无人机初始位置的纵坐标y相对于无人机初始位置的横坐标x的调整点值。
[0057]
实施例2
[0058]
本实施例提供一种无人机火灾实时监测方法,包括以下步骤:
[0059]
s1:发生火灾时,布控在被监测区域的预警模块向无人机发出火灾警报,并向无人机的主控模块发出火灾发生区域中心(o
x
,o
y
)的地理位置信息;
[0060]
s2:无人机主控模块接收到火灾发生区域中心(o
x
,o
y
)的地理位置信息后形成飞行路径和可以安全监测火灾发生区域情况的安全范围航行轨道,无人机接收到报警信号后从初始位置l出发,向火灾发生区域行进,初始位置l的坐标为(x,y)具体包括以下步骤:
[0061]
s21:无人机主控模块根据接收到的火灾发生区域中心(o
x
,o
y
)的地理位置信息以及gps模块实时定位到的初始位置(x,y),构建如图2所示的安全范围航行轨道模型:
[0062][0063]
其中,安全范围航行轨道为一个以火灾发生区域中心为圆心的、半径为r的圆;o
x
为火灾发生区域中心的横坐标,o
y
为火灾发生区域中心的纵坐标;x为无人机的初始位置l的横坐标,y为无人机的初始位置l的纵坐标;
[0064]
s22:构建无人机飞行初始位置至安全范围航行轨道的实时飞行路径模型:
[0065]
x
t 1
=x
t
v cosα;
[0066]
y
t 1
=y
t
v sinα;
[0067]
其中,x
t
为t时刻无人机飞行所在位置的横坐标,y
t
为t时刻无人机飞行所在位置的纵坐标;x
t 1
为t 1时刻无人机飞行所在位置的横坐标,y
t 1
为t 1时刻无人机飞行所在位置的纵坐标;v为t 1时刻与t时刻无人机飞行所在位置两点之间的距离;α为火灾发生区域中心(o
x
,o
y
)至初始位置l连线与初始位置l所在水平线之间的夹角;初始位置l的坐标为(x,y);
[0068]
s3:如图3所示,无人机按照步骤s2形成的飞行路径飞行至安全范围航行轨道并实时更新无人机在安全范围航行轨道的位置坐标,然后按照步骤s2构建的安全范围航行轨道进行实时火灾险情监测,避免离火灾发生区域的着火点过近而坠毁,当无人机沿步骤s22构建的实时飞行路径模型到达步骤s21构建的模型的安全范围航行轨道后,沿安全范围航行轨道飞行进行实时火灾险情监测,主控模块实时更新无人机沿安全范围航行轨道飞行的坐标点更新算法为:
[0069][0070][0071]
其中,λ为第i时刻轨道安全范围航行轨道坐标点与第i
‑
1时刻的轨道安全范围航行轨道坐标点的步进角;β为α的共轭角;
[0072]
无人机分别采集火灾发生区域的图像数据信息和温度数据信息,传递给主控模块后,主控模块通过无线通信模块传输给远程数据收集及控制终端模块,远程数据收集及控制终端模块记录火灾险情信息以及调配灭火人员。
[0073]
无人机初始位置的纵坐标y与无人机初始位置的横坐标x成线性关系:
[0074]
y=mx n
[0075]
其中m为无人机初始位置的纵坐标y随无人机初始位置的横坐标x变化的线性系数,n为无人机初始位置的纵坐标y相对于无人机初始位置的横坐标x的调整点值。
[0076]
实施例3
[0077]
本实施例提供一种采用实施例2提供的方法的无人机火灾实时监测系统,如图4所示,系统包括无人机惯性测量模块、rgb彩色相机模块、ros温度传感器模块、gps实时定位模块、主控模块、无线通信模块、远程数据收集及控制终端模块;
[0078]
无线通信模块采用mavlink无人机通讯协议;rgb彩色相机模块为采用非接触式红外传感器的热敏多光谱相机;热敏多光谱相机的分辨率为2064
×
1544。
[0079]
无人机惯性测量模块,用于实时定位无人机在飞行过程中的无人机的行进方向和三维速度;
[0080]
gps实时定位模块用于实时定位无人机在飞行过程中的地理位置信息;
[0081]
主控模块,用于主控模块接收到火灾发生区域中心(o
x
,o
y
)的地理位置信息后形成飞行路径和可以安全监测火灾发生区域情况的安全范围航行轨道并实时更新无人机沿安
全范围航行轨道飞行的坐标点
[0082]
rgb彩色相机模块,用于实时采集火灾发生区域的图像数据信息;
[0083]
ros温度传感器模块,用于实时采集火灾发生区域的温度数据信息;
[0084]
无线通信模块,用于将主控模块采集到的火灾发生区域的图像数据信息和温度数据信息传输给远程数据收集及控制终端模块;
[0085]
远程数据收集及控制终端模块,用于记录火灾险情信息以及调配灭火人员。
[0086]
实施例4
[0087]
本实施例提供一种采用实施例2提供的方法的无人机火灾实时监测系统,如图5所示,系统包括无人机惯性测量模块、rgb彩色相机模块、ros温度传感器模块、gps实时定位模块、主控模块、无线通信模块、远程数据收集及控制终端模块、气压检测传感器模块、烟雾检测传感器模块、感光传感器模块;
[0088]
无线通信模块采用mavlink无人机通讯协议,rgb彩色相机模块为采用非接触式红外传感器的热敏多光谱相机;热敏多光谱相机的分辨率为2064
×
1544。
[0089]
无人机惯性测量模块,用于实时定位无人机在飞行过程中的无人机的行进方向和三维速度;
[0090]
gps实时定位模块用于实时定位无人机在飞行过程中的地理位置信息;
[0091]
主控模块,用于主控模块接收到火灾发生区域中心(o
x
,o
y
)的地理位置信息后形成飞行路径和可以安全监测火灾发生区域情况的安全范围航行轨道并实时更新无人机沿安全范围航行轨道飞行的坐标点
[0092]
rgb彩色相机模块,用于实时采集火灾发生区域的图像数据信息;
[0093]
ros温度传感器模块,用于实时采集火灾发生区域的温度数据信息;
[0094]
无线通信模块,用于将主控模块采集到的火灾发生区域的图像数据信息和温度数据信息传输给远程数据收集及控制终端模块;
[0095]
远程数据收集及控制终端模块,用于记录火灾险情信息以及调配灭火人员。
[0096]
虽然已经参考优选实施例对本发明进行了描述,但在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,各个实施例中所提到的各项技术特征均可以任意方式组合起来。本发明并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

