1.本发明涉及一种飞行器控制方法,特别是涉及一种考虑执行器饱和的飞行器鲁棒跟踪控制方法,属于飞行控制领域。
背景技术:
2.在航空航天领域,受物理特性限制,飞行器执行机构的作动范围有限,当控制器给出的控制信号超出执行器的最大作动能力就会出现执行器饱和的情况,比如在高超声速飞行器中,升降舵偏角的作动范围为δ
e
∈[
‑
15
°
,15
°
],油门阀开度的工作范围为φ∈[0.05,1.2]。执行器饱和是一种强非线性,会影响系统稳定性和动态性能。因此,在控制器设计过程中必须考虑执行器饱和的影响,保障系统的稳定性和工作性能。
[0003]
处理执行器饱和的一种简单方法是在不考虑饱和的情况下,先按照线性系统设计控制器,再引入补偿环节抵消饱和给系统带来的不利影响。但是这种间接处理方法的处理效果有限,更优的选择是采取直接方法,即考虑饱和非线性,使用非线性控制理论设计非线性控制器。这种方法可以取得更好的控制效果,然而却需要完全摒弃工程上经常应用的经典线性控制器。
技术实现要素:
[0004]
要解决的技术问题
[0005]
为了避免现有技术的不足之处,本发明提出一种考虑执行器饱和的飞行器鲁棒跟踪控制方法,该方法能够充分利用工程上成熟的线性控制方法,同时克服饱和非线性对飞行的影响。
[0006]
技术方案
[0007]
一种考虑执行器饱和的非线性飞行器鲁棒控制方法,其特征在于步骤如下:
[0008]
步骤1:将飞行器模型分解为考虑所有干扰和不确定的线性主系统和考虑执行器饱和的非线性辅系统;
[0009]
步骤2:设计观测器用以估计辅系统的状态和主系统的输出;
[0010]
步骤3:针对主系统和辅系统分别设计控制器,设计好主、辅系统的控制器后,综合二者得到原系统的控制器。
[0011]
本发明进一步的技术方案为:步骤1具体为:
[0012]
其中主系统为
[0013][0014]
y
p
=cx
p
,x
p
(0)=x0[0015]
其中φ(x
d
)是一个与时间相关,与状态无关的函数,x
p
,u
p
,y
p
为主系统的状态、输入和输出;为系统矩阵,为输入矩阵,为输出矩阵,为未知干扰;
[0016]
定义辅系统的状态、输入和输出x
s
,u
s
,y
s
为
[0017][0018]
辅系统是原系统与主系统的差
[0019][0020]
y
s
=cx
s
,x
s
(0)=0
[0021]
根据加性状态分解,有如下关系
[0022]
x=x
p
x
s
,u=u
p
u
s
,y=y
p
y
s
[0023]
。
[0024]
本发明进一步的技术方案为:步骤2具体为:
[0025]
设计如下观测器:
[0026][0027][0028]
用以估计辅系统的状态和主系统的输出,即x
s
,y
p
。
[0029]
本发明进一步的技术方案为:步骤3具体为:
[0030]
考虑主系统,设计具有扰动抑制能力的主控制器为
[0031]
u
p
=h(y
p
‑
y
d
)
[0032]
使得当t
→
∞时y
p
(t)
‑
y
d
(t)
→
0,其中h(
·
)是一个线性函数;
[0033]
考虑辅系统,设计具有处理系统非线性和执行器饱和的辅控制器为
[0034]
u
s
=l(x
s
)
[0035]
使得当t
→
∞时,x
s
(t)
→
0,l(
·
)是待设计的函数;
[0036]
最终设计的鲁棒跟踪控制器为
[0037][0038][0039]
u=h(y
p
‑
y
d
) l(x
s
)
[0040]
那么,原飞行器系统的状态满足当t
→
∞时,y(t)
‑
y
d
(t)
→
0。
[0041]
有益效果
[0042]
本发明提出的一种考虑执行器饱和的飞行器鲁棒控制方法,它是一种在原有线性控制基础上充分考虑了系统饱和非线性的控制方法,在有饱和出现的情况下通过将饱和分离出来单独进行处理,整体上可以获得比原有线性控制方法更好的飞行控制效果。本方法简单有效,灵活性和可靠性较高。
[0043]
与现有技术相比有益效果为:
[0044]
(1)本发明充分考虑了系统的非线性信息及不确定和干扰的影响,可以取得良好的轨迹跟踪效果。
[0045]
(2)本发明充分考虑了执行器饱和对系统控制性能的影响,可以通过辅系统的补偿实现在主系统中仍采用经典的线性控制方法。
[0046]
(3)本发明通过问题分解降低了控制器的设计难度,两个子系统控制器的设计相比原系统控制器的设计更加简单灵活。
附图说明
[0047]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0048]
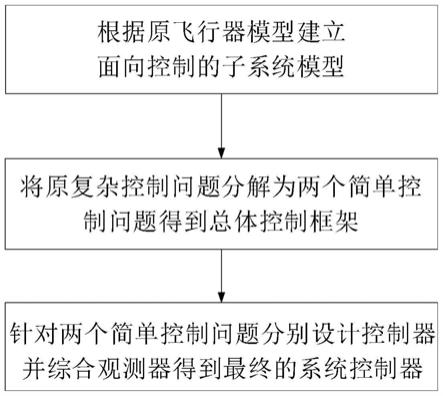
图1是本发明一种考虑执行器饱和的飞行器鲁棒跟踪控制方法的流程图
具体实施方式
[0049]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0050]
本发明针对的考虑执行器饱和的飞行器模型如下:
[0051][0052]
其中,为飞行器系统状态,系统输出为控制输入为为系统矩阵,为输入矩阵,是和x相关的一个非线性函数向量,为输出矩阵,为未知干扰,期望输出表示为y
d
,饱和函数为sat(
·
)=[sat(u1),
…
,sat(u
i
),
…
,sat(u
m
)]
t
,i=1,2,
…
,m,定义如下
[0053][0054]
针对系统(1),(a,c)可观,系统状态可测。
[0055]
系统控制目标为:在任意初始条件x0下,当系统存在输入饱和及干扰和不确定d时,实现系统的鲁棒跟踪控制,即当t
→
∞时,y(t)
‑
y
d
(t)
→
0。
[0056]
本发明提出一种考虑执行器饱和的飞行器鲁棒控制方法,具体如图1所示,本控制方法包括以下三个部分:
[0057]
(1)面向控制的模型建立
[0058]
因为系统(1)为包含饱和非线性的飞行器模型,为了能够继续使用经典的线性控制方法,这里将饱和非线性分离出来进行单独处理。为了实现这一目标,首先对考虑执行器饱和的飞行器模型进行模型变换。
[0059]
将系统(1)分解为考虑所有干扰和不确定的线性主系统和考虑执行器饱和的非线性辅系统。其中主系统为
[0060][0061]
其中φ(x
d
)是一个与时间相关,与状态无关的函数,x
p
,u
p
,y
p
为主系统的状态,输入和输出。因此,主系统(3)是线性的。然后,定义辅系统的状态,输入和输出x
s
,u
s
,y
s
为
[0062]
[0063]
辅系统是原系统与主系统的差
[0064][0065]
根据加性状态分解,有如下关系
[0066]
x=x
p
x
s
,u=u
p
u
s
,y=y
p
y
s
.
[0067]
至此,模型变换完成,主系统(3)和辅系统(4)为面向控制的模型。下面介绍总体的控制器设计框架。
[0068]
(2)总体控制框架建立
[0069]
主系统(3)是一个多输入多输出的线性系统,有着外部信号φ(y
d
)。针对主系统,指定控制任务为实现跟踪控制,使得当t
→
∞时,系统输出y
p
(t)
‑
y
d
(t)
→
0。
[0070]
辅系统(4)是一个精确的非线性系统,包含了原系统非线性及执行器饱和。当主系统跟踪上了目标,那么辅系统的平衡点为原点。针对辅系统,指定控制任务为镇定飞行器系统的非线性及饱和,使得当t
→
∞时,系统状态x
s
(t)
→
0。
[0071]
由于主系统和辅系统是设计模型,而非真实存在的模型,因此需要设计观测器来获取这两个系统的状态值。设计如下观测器
[0072][0073]
用以估计辅系统的状态和主系统的输出,即x
s
,y
p
。
[0074]
基于面向控制的模型,原非线性系统的输出跟踪问题分解为线性主系统的输出跟踪问题和非线性辅系统的镇定控制问题。主系统实现轨迹跟踪控制,即控制目标为当t
→
∞时,y
p
(t)
‑
y
d
(t)
→
0。主系统跟踪问题就变成了输出反馈跟踪问题。辅系统只需要解决存在执行器饱和情况下的镇定问题,控制目标为当t
→
∞时,x
s
(t)
→
0。镇定问题比原系统的跟踪问题简单,因为辅系统的状态已知且不需要解决跟踪问题。当y
p
(t)
‑
y
d
(t)
→
0且x
s
(t)
→
0时,有y(t)
‑
y
d
(t)
→
0。因此,总体的控制框架为:观测器提供辅系统状态和主系统输出的观测值,在此基础上,主系统控制器和辅系统控制器共同作用实现存在执行器饱和的飞行器的鲁棒飞行控制。下面介绍主系统及辅系统的控制器设计。
[0075]
(3)控制器设计
[0076]
针对主系统和辅系统分别设计控制器,设计好主、辅系统的控制器后,可以综合二者得到原系统的控制器。
[0077]
考虑主系统,设计具有扰动抑制能力的主控制器为
[0078]
u
p
=h(y
p
‑
y
d
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0079]
使得当t
→
∞时y
p
(t)
‑
y
d
(t)
→
0,其中h(
·
)是一个线性函数。
[0080]
考虑辅系统,设计具有处理系统非线性和执行器饱和的辅控制器为
[0081]
u
s
=l(x
s
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0082]
使得当t
→
∞时,x
s
(t)
→
0,l(
·
)是待设计的函数。
[0083]
只要两个子问题可以被很好的解决,那么原问题也就被解决了。最终设计的原系统的鲁棒跟踪控制器为
[0084][0085]
那么,原飞行器系统的状态满足当t
→
∞时,y(t)
‑
y
d
(t)
→
0。
[0086]
以高超声速飞行器为例,进行考虑执行器饱和的飞行器鲁棒跟踪控制器的设计。
[0087]
马赫数为15,高度为110000ft的巡航段高超声速飞行器纵向通道winged
‑
cone模型具体如下:
[0088][0089]
此模型包括5个状态变量x=[v,h,α,γ,q]
t
和两个控制输入u=[δ
e
,β]
t
。其中,v是速度,γ是航迹角,h是高度,α是攻角,q是俯仰角速率,δ
e
是升降舵舵偏角,β为节流阀开度。t,d,l,m
yy
分别代表推力,阻力,升力和俯仰转动力矩。m,i
yy
,μ,r分别代表飞行器的质量,俯仰转动惯量,重力常数和地心的径向距离。
[0090]
考虑控制输入的执行器饱和为β∈[0.05,1.2],δ
e
∈[
‑
15
°
,15
°
],设计非线性鲁棒跟踪控制器保证在执行器饱和影响下高超声速飞行器依然可以取得很好的跟踪性能。
[0091]
鲁棒跟踪控制方法具体步骤如下:
[0092]
(1)面向控制的模型建立
[0093]
高超声速飞行器模型可以写成如下的形式
[0094][0095]
其中φ(
·
,
·
)为表示模型(9)的一个综合函数,上式通过模型变换可以写成式(1)的形式。
[0096]
考虑平衡点x
trim
,u
trim
,基于小角度线性化并且考虑常规线性化忽略的非线性得到
[0097][0098]
其中取输出y=[v,h]
t
。
[0099]
然后通过系统分解得到如下主系统和辅系统
[0100]
主系统:
[0101]
辅系统:
[0102]
(2)总体控制框架建立
[0103]
设计如下观测器用于观测两个子系统状态
[0104][0105]
主系统实现轨迹跟踪控制,即控制目标为当t
→
∞时,y
p
(t)
‑
y
d
(t)
→
0。主系统跟踪问题就变成了输出反馈跟踪问题。辅系统只需要解决镇定问题,控制目标为当t
→
∞时,x
s
(t)
→
0。当y
p
(t)
‑
y
d
(t)
→
0且x
s
(t)
→
0时有y(t)
‑
y
d
(t)
→
0。因此,总体的控制框架为:观测器提供辅系统状态和主系统输出的观测值,再此基础上,主系统和辅系统共同作用实现存在执行器饱和的飞行器的鲁棒飞行控制。
[0106]
(3)控制器设计
[0107]
考虑鲁棒跟踪控制器的设计。为主系统(12)设计线性二次积分器。一般为了消除跟踪误差,控制器中会考虑积分项
[0108][0109]
则可得如下扩维系统
[0110][0111]
设计状态反馈控制器
[0112]
u
p
=
‑
k
x
x
p
‑
k
e
q
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0113]
其中k
x
和k
e
为反馈矩阵,则可保证系统的鲁棒跟踪目标。这里可采用线性二次调节器方法来确定反馈矩阵k
x
和k
e
。
[0114]
为辅系统(13)设计状态反馈控制器。设计控制输入为
[0115]
u
s
=l
t
x
s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)其中是一个为控制器参数,则可保证辅系统的渐进稳定。
[0116]
最终的控制器由主系统控制器、辅系统控制器和观测器组合而成
[0117][0118]
本发明未详细说明部分属于领域技术人员公知常识。
[0119]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

