基于bp
‑
pid神经网络的弹载电动舵机舵偏角位置跟踪方法
技术领域
1.本发明属于弹载电动舵机控制领域,具体涉及一种基于bp
‑
pid神经网络的弹载电动舵机舵偏角位置跟踪方法。
背景技术:
2.随着科学技术的飞速发展,各国国防事业也存在着激烈的竞争。近20年来,国际热点地区的局部战争表明,远程精确打击、超机动打击、自主打击以及智能毁伤等已成为未来制导弹药发展的必然趋势。面对现代战争对制导武器的性能提出了越来越高的要求,作为制导武器飞行控制重要部分的舵机,对其性能的要求因此也越来越高,它直接决定着制导武器飞行过程的动态品质。电动舵机作为现代武器制导系统的主要执行机构,在制导炮弹中的应用越来越广泛,其主要任务是:接受弹载计算机给出的俯仰、偏航和滚转的舵面偏转信号,经过信号变换与功率放大,克服气动铰链力矩和弯曲力矩,驱动舵面按照预定的方向以一定角速度偏转,形成与控制信号成比例的舵偏角,从而改变弹体的飞行姿态,最后确保炮弹在空中按照预定轨迹飞行或打击给定战术目标。
3.高性能伺服电机和先进控制技术是实现舵机精密控制的关键因素,然而电动舵机是一种多变量、非线性、强耦合以及参数时变的复杂系统,并且由于系统的参数摄动、摩擦以及空气铰链力矩等负载扰动的非线性不确定因素直接影响系统的动静态特性。传统pid控制以其结构简单、可靠性高、易于工程实现等优点至今仍被广泛采用,但是该算法对于电动舵机状态的估计是基于线性模型,而电动舵机是一个复杂非线性系统,因此难以用一个精确的数学表达式来描述电动舵机的内部关系。
技术实现要素:
4.本发明的目的在于提供一种基于bp
‑
pid神经网络的弹载电动舵机舵偏角位置跟踪方法,以解决传统pid算法对于复杂非线性系统控制精度低、抗干扰能力差的问题。
5.实现本发明目的的技术解决方案为:一种基于bp
‑
pid神经网络的弹载电动舵机舵偏角位置跟踪方法,包括如下步骤:
6.步骤(1):根据弹载电动舵机的系统组成,建立相应的数学模型;
7.步骤(2):搭建弹载电动舵机三闭环pid控制系统,包括位置环、速度环和电流环,在位置环中引入了bp神经网络算法,确定bp
‑
pid神经网络的算法结构,设计一种4
×5×
3的三层神经网络模型,即4个输入层神经元、5个隐含层神经元和3个输出层神经元,以舵偏角的参考设定值y
ref
(k)、实际舵偏值y(k)、以上二者差值e(k)以及常值1作为神经网络的输入,以pid控制器的调节系数k
p
,k
i
,k
d
作为系统的输出;
8.步骤(3):根据步骤二所设定舵偏角的参考位置y
ref
(k),对输入层与隐含层之间的权重系数隐含层与输出层之间的权重系数分别赋予初始值,j表示输入层节点,i表示隐含层节点,l表示输出层节点;然后进行bp
‑
pid神经网络算法的前向传播,最后可以得出bp
‑
pid神经网络算法的输出;
9.步骤(4):在反向传播过程中,依据梯度下降法修正bp神经网络的权重系数,利用性能指标函数e(k)搜索调整加权系数的负梯度方向,且考虑搜索快速收敛全局极小的惯性项;
10.步骤(5):利用学习算法在线修正输入层与隐含层之间的权重系数和隐含层与输出层之间的权重系数
11.步骤(6):增加迭代次数,令k=k 1,返回步骤(3),直到bp神经网络输出层的输出误差满足要求,则停止计算。
12.进一步的,步骤(3)中的前向传播具体包括如下步骤:
13.步骤(31):在bp
‑
pid神经网络算法的前向传播过程中,输入层的4个输入x1、x2、x3、x4分别表示为,
[0014][0015]
输入层的输出表示为,
[0016][0017]
步骤(32):隐含层的输入
‑
输出表示为,
[0018][0019]
式中,为输入层与隐含层之间的权重系数,上角标(1)、(2)、(3)分别对应神经网络的输入层、隐含层、输出层,f[
·
]为隐含层神经元的变换函数,此处取正负对称的sigmoid激活函数,即
[0020][0021]
且f
′
(x)=(1
‑
f2(x))/2;
[0022]
步骤(33):输出层的输入
‑
输出表示为,
[0023][0024]
式中,为隐含层与输出层之间的权重系数,g[
·
]为输出层神经元的变换函数,此处可取非负的sigmoid激活函数,即
[0025][0026]
且g
′
(g)=g(x)(1
‑
g(x))。
[0027]
进一步的,步骤(4)中的性能指标函数e(k)表示为:
[0028][0029]
进一步的,步骤(5)具体为:
[0030]
依据神经网络的性能指标函数e(k),可得出隐含层与输出层之间的权重系数的学习算法为,
[0031][0032]
上式中,η为学习速率,α为惯性系数;由此可进一步得出,
[0033][0034]
上式中,由于未知,因此可利用符号函数近似取代,并动态调整学习速率η来补偿误差;
[0035]
bp神经网络隐含层与输出层之间的权重系数的学习算法表示为,
[0036][0037]
可得bp神经网络输入层与隐含层之间的权重系数的学习算法为,
[0038][0039]
其中,η为学习速率,α为惯性系数,为隐含层输出,e(k)为参考设定舵偏角y
ref
(k)与实际舵偏角y(k)的差值,即e(k)=y
ref
(k)
‑
y(k),由于未知,利用符号函数近似取代;g’(
·
)为输出层神经元激活函数的微分形式,为隐含层输入;第二个等式中,为输入层输出,f’(
·
)为隐含层神经元激活函数的微分形式,为隐含层输入。
[0040]
本发明与现有技术相比,其显著优点在于:
[0041]
(1)本发明采用三层bp
‑
pid神经网络算法并应用于弹载电动舵机三闭环控制系统的位置环中,该算法可以对pid控制器的k
p
,k
i
,k
d
参数进行在线调节,具有较强的非线性映射能力,可以有效的抑制被控对象的非线性因素。
[0042]
(2)本发明采用的bp
‑
pid神经网络算法相比于传统pid控制,在参考正弦信号下,其舵偏角位置响应时间更短,幅值误差和相位误差更小。
附图说明
[0043]
图1为本发明基于bp
‑
pid神经网络的弹载电动舵机系统的总体控制流程框图。
[0044]
图2为本发明基于bp
‑
pid神经网络的弹载电动舵机系统的算法结构示意图。
[0045]
图3为本发明基于bp
‑
pid神经网络的弹载电动舵机系统的三层bp神经网络结构图。
[0046]
图4为本发明基于bp
‑
pid神经网络的弹载电动舵机系统,不同控制算法下幅值
10
°
、频率4hz的正弦信号舵偏响应跟踪曲线。
具体实施方式
[0047]
为了说明本发明的技术方案及技术目的,下面结合附图及具体实施例对本发明做进一步的介绍。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
[0048]
结合图1所示,基于bp
‑
pid神经网络的弹载电动舵机控制系统结构图。首先,建立弹载电动舵机系统的数学模型,无刷直流电机作为电动舵机系统的总体控制框图,其相电压方程的矩阵形式可表示为,
[0049][0050]
式中,u
a
,u
b
和u
c
为三相电压;r为三相电阻;i
a
,i
b
和i
c
为三相电流;l表示三相绕组自感;m为三相绕组之间的互感;e
a
,e
b
和e
c
为三相反电动势;d/dt表示微分算子。
[0051]
电机的电磁转矩方程可表示为,
[0052]
t
em
=(e
a
i
a
e
b
i
b
e
c
i
c
)/ω
[0053]
上式中,t
em
表示电机的电磁转矩,ω是电机机械角速度。
[0054]
电机的运动方程可表示为,
[0055][0056]
式中,t
l
为电机的负载转矩,j
m
为电机的转子转动惯量,b为电机的黏滞摩擦系数。
[0057]
电动舵机系统的负载力矩即为舵面受到的铰链力矩,它不仅与炮弹飞行时受到的空气动压有关,而且还与飞行的马赫数相关。同时铰链力矩还与系统舵面的偏转角有关,变化范围非常大,通常认为舵机系统受到的铰链力矩与舵偏角θ成正比关系,即为弹性负载,可表示为,
[0058]
t
θ
=k
θ
θ
[0059]
式中,t
θ
为舵面输出的铰链力矩,k
θ
=t
max
/θ
max
,t
max
为最大铰链力矩,θ
max
为舵面最大偏转角,舵面的运动方程为,
[0060][0061]
式中,t
l’为电机通过减速器传给舵面的转矩,j
l
为舵面绕转轴的转动惯量,θ为舵面偏转角,b
l
为舵面受到的阻尼系数,t
f
为输出轴受到的常阻值转矩。假设减速器的传动效率为η,将负载转矩折算到电机侧可得,
[0062]
t
l
=t
l
′
/jη
[0063]
式中,j为减速器的减速比,且假设减速器机构中各轴的转速分别为ω1,ω2,
……
,转动惯量为j1,j2,
……
,各级减速比为j1,j2,
……
,依据系统动能不变的原则,可将整个传动机构的转动惯量折算到电机侧可得,
[0064][0065]
式中j为等效后系统的转动惯量,则有j=(j
m
j1/j
12
l j
l
/j
l2
)/η,根据该转换方
法可得舵机系统的运动方程为,
[0066][0067]
结合图2和图3,基于bp
‑
pid神经网络的弹载电动舵机系统的算法结构示意图以及三层bp神经网络结构图,bp
‑
pid神经网络算法的计算步骤如下所示。
[0068]
步骤一:在bp
‑
pid神经网络算法的前向传播过程中,输入层的4个输入x1、x2、x3、x4分别可表示为,
[0069][0070]
输入层的输出可表示为,
[0071][0072]
步骤二:隐含层的输入
‑
输出可表示为,
[0073][0074]
式中,为输入层与隐含层之间的权重系数,上角标(1)、(2)、(3)分别对应神经网络的输入层、隐含层、输出层,f[
·
]为隐含层神经元的变换函数,此处可取正负对称的sigmoid激活函数,即
[0075][0076]
且f
′
(x)=(1
‑
f2(x))/2。
[0077]
步骤三:输出层的输入
‑
输出可表示为,
[0078][0079]
式中,为隐含层与输出层之间的权重系数,g[
·
]为输出层神经元的变换函数,此处可取非负的sigmoid激活函数,即
[0080][0081]
且g
′
(g)=g(x)(1
‑
g(x))。
[0082]
步骤四:在bp神经网络算法的反向传播过程中,为了提升收敛速度,依据梯度下降法修正bp神经网络的权重系数,利用性能指标函数e(k)搜索调整加权系数的负梯度方向,且考虑搜索快速收敛全局极小的惯性项。
[0083]
神经网络的性能指标函数e(k)可表示为,
[0084]
[0085]
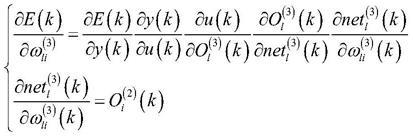
步骤五:依据神经网络的性能指标函数e(k),可得出隐含层与输出层之间的权重系数的学习算法为,
[0086][0087]
式中,η为学习速率,α为惯性系数。由此可进一步得出,
[0088][0089]
上式中,由于未知,因此可利用符号函数近似取代,并动态调整学习速率η来补偿误差。
[0090]
bp神经网络隐含层与输出层之间的权重系数的学习算法可表示为。
[0091][0092]
步骤六:根据步骤五,可得bp神经网络输入层与隐含层之间的权重系数的学习算法为,
[0093][0094]
图4为弹载电动舵机控制系统中位置环采用bp
‑
pid神经网络算法下,舵偏角的正弦信号跟踪响应曲线,图中横坐标表示时间t,纵坐标表示舵面偏角位置。设定幅值10
°
、频率4hz的参考正弦信号,从图中可以明显得出,采用bp
‑
pid神经网络算法控制下的弹载电动舵机系统,其舵偏角的位置跟踪响应速度快,更加接近于参考设定值。具体分析图4中的数据可得下表1所示,
[0095]
表1幅值10
°
、频率4hz的正弦信号跟踪
[0096][0097]
从中可以得出采用bp
‑
pid神经网络算法控制下的弹载电动舵机系统,其幅值误差和相位误差相比于传统pid控制更小,鲁棒性更强,控制系统更加稳定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

