1.本发明涉及轨道交通技术领域,尤其涉及一种有轨电车车载控制器及有轨电车。
背景技术:
2.在有轨电车的信号系统中,车载控制器的安全完整性要求为sil2级,其功能包括与中心控制设备及道岔控制箱的车地通讯,操作命令的解析,运营计划的存储,操作记录的存储,电子标签读取等工作,需要采集大量的数据,且控制系统的采集量和输出量较多。
3.然而,现有的嵌入式系统的单片机输入输出端口有限,单个单片机不能满足铁路信号系统中所有数据的采集和输出。如果将地铁列车的安全完整性等级为sil4级的车载控制器运用于有轨电车上,则面临着性能过剩、成本较高的难题。
技术实现要素:
4.本发明提供一种有轨电车车载控制器及有轨电车,用以解决现有技术中嵌入式系统的单片机应用于有轨电车无法满足多数据的输入和输出,以及地铁列车的车载控制器应用于有轨电车性能过剩、成本较高的缺陷。
5.本发明提供一种有轨电车车载控制器,包括:
6.多端口传输模块和数据处理模块,所述多端口传输模块的第一输出端与所述数据处理模块的输入端连接;
7.所述多端口传输模块包括多个端口,用于通过对应端口接收列车安全信号和列车非安全信号,并将所述列车安全信号和所述列车非安全信号发送至所述数据处理模块;
8.所述数据处理模块采用实时操作系统,用于接收列车控制信息,所述列车安全信号和所述列车非安全信号,并基于所述列车控制信息,所述列车安全信号和所述列车非安全信号,确定列车的实时运行参数,并将所述实时运行参数发送至所述多端口传输模块,以使所述多端口传输模块将所述实时运行参数发送至列车自动控制系统,以使所述列车自动控制系统控制列车运行。
9.根据本发明提供的一种有轨电车车载控制器,所述有轨电车车载控制器还包括隔离输入模块、隔离输出模块以及速度传输模块;
10.所述隔离输入模块的输出端与所述多端口传输模块的输入端连接,用于采集所述列车安全信号和所述列车非安全信号;
11.所述隔离输出模块的输入端与所述多端口传输模块的输出端连接,用于将所述列车安全信号和所述列车非安全信号发送至所述列车自动控制系统;
12.所述速度传输模块的输入端与所述多端口传输模块的输出端连接,用于将所述实时运行参数发送至所述列车自动控制系统。
13.根据本发明提供的一种有轨电车车载控制器,所述隔离输入模块包括40路隔离输入电路,所述隔离输出模块包括24路隔离输出电路,所述速度传输模块包括6路速度传输电路。
14.根据本发明提供的一种有轨电车车载控制器,所述40路隔离输入电路中的16路输出的高电平电压为17v~24v,以及输出的低电平电压为0v~5v;所述40路隔离输入电路中的24路输出的高电平电压为110v,以及输出的低电平电压为0v~5v。
15.根据本发明提供的一种有轨电车车载控制器,所述列车控制信息包括应答器信息、牵引制动信息、位置信息以及车地信息;
16.所述有轨电车车载控制器还包括第一通信模块、第二通信模块、第三通信模块和第四通信模块;
17.所述第一通信模块的输出端与所述数据处理模块的输入端连接,用于采集所述应答器信息;
18.所述第二通信模块的输出端与所述数据处理模块的输入端连接,用于采集所述牵引制动信息;
19.所述第三通信模块的输出端与所述数据处理模块的输入端连接,用于采集所述位置信息;
20.所述第四通信模块的输出端与所述数据处理模块的输入端连接,用于采集所述车地信息。
21.根据本发明提供的一种有轨电车车载控制器,所述数据处理模块为基于arm cortex
‑
m内核单片机tms570ls1227zwt的电路模块,所述多端口传输模块为基于现场可编程门阵列芯片ep4ce10的电路模块。
22.根据本发明提供的一种有轨电车车载控制器,所述有轨电车车载控制器还包括隔离电源模块,所述隔离电源模块的输出端分别与所述多端口传输模块的输入端和所述数据处理模块的输入端连接。
23.根据本发明提供的一种有轨电车车载控制器,所述实时操作系统为freertos实时操作系统。
24.根据本发明提供的一种有轨电车车载控制器,所述列车自动控制系统包括列车自动防护系统和列车自动驾驶系统。
25.本发明还提供一种有轨电车,包括:如上所述的有轨电车车载控制器。
26.本发明提供的有轨电车车载控制器及有轨电车,多端口传输模块包括多个端口,实现了单片机的端口扩展,解决了现有技术中单片机端口不足,无法满足有轨列车数据采集和传输要求的问题。同时,多端口传输模块进行端口扩展,而数据处理全部在数据处理模块中完成,保证整个系统的数据的同步性,增加系统的稳定性和处理效率。此外,数据处理模块采用实时操作系统,从而能够对接收到的数据进行快速高效的处理,并将数据处理后得到的实时运行参数快速输出,更好地保证系统的实时性和可靠性。
附图说明
27.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
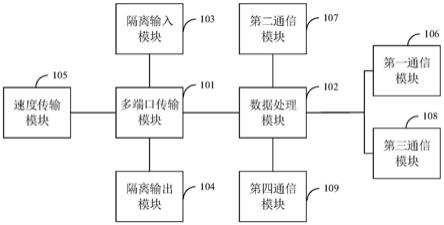
28.图1是本发明提供的有轨电车车载控制器的结构示意图之一;
29.图2是本发明提供的有轨电车车载控制器的结构示意图之二;
30.附图标记:
31.101:多端口传输模块;
ꢀꢀ
102:数据处理模块;
ꢀꢀꢀ
103:隔离输入模块;
32.104:隔离输出模块;
ꢀꢀꢀꢀ
105:速度传输模块;
ꢀꢀꢀ
106:第一通信模块;
33.107:第二通信模块;
ꢀꢀꢀꢀ
108:第三通信模块;
ꢀꢀꢀ
109:第四通信模块。
具体实施方式
34.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.现有技术的有轨电车车载控制器常用的window操作系统和linux操作系统为非实时操作系统,不能满足铁路信号系统的安全等级。而且,一般列车需要采集和控制的信号多达上百种,嵌入式系统的单片机输入输出端口有限,单个单片机有很难独自完成数量如此众多的信号的采集、处理和输出。此外,有轨电车车载控制器的的安全完整性要求为sil2级,如果将地铁列车的安全完整性等级为sil4级的车载控制器运用于有轨电车上,则面临着性能过剩、成本较高的难题。
36.对此,本发明提供一种有轨电车车载控制器。图1是本发明提供的有轨电车车载控制器的结构示意图,如图1所示,有轨电车车载控制器包括多端口传输模块101和数据处理模块102,多端口传输模块101的第一输出端与数据处理模块102的输入端连接;
37.其中,多端口传输模块101包括多个端口,用于通过对应端口接收来自列车自动控制系统的列车安全信号和列车非安全信号,并将列车安全信号和列车非安全信号发送至数据处理模块102;其中多端口传输模块101可以为fpga模块(field programmable gate array)。
38.数据处理模块102采用实时操作系统,用于接收列车控制信息(如应答器信息、牵引制动信息、雷达信息、北斗/gps信息、车地信息等),列车安全信号和列车非安全信号,并对列车控制信息,列车安全信号和列车非安全信号进行分析处理后,生成列车的实时运行参数(如列车的速度信息),并将实时运行参数发送至多端口传输模块101,以使多端口传输模块101将实时运行参数发送至列车自动控制系统,从而列车自动控制系统可以根据实时运行参数控制列车运行,保障列车的运行安全。其中,数据处理模块102可以为微控制单元模块(microcontroller unit,mcu模块)。
39.需要说明的是,由于多端口传输模块101包括多个端口,从而实现了对现有技术中嵌入式系统单片机的端口扩展,解决了现有技术中单片机端口不足,无法满足有轨列车数据采集和传输要求的问题。同时,多端口传输模块101仅进行端口扩展,而数据处理全部在数据处理模块102中完成,保证整个系统的数据的同步性,增加系统的稳定性和处理效率。此外,数据处理模块102采用实时操作系统,从而能够对接收到的数据进行快速高效的处理,在规定时间内做出响应,并将数据处理后的结果(列车的实时运行参数)快速输出,更好地保证系统的实时性和可靠性。
40.本发明实施例提供的有轨电车车载控制器,多端口传输模块包括多个端口,实现
了单片机的端口扩展,解决了现有技术中单片机端口不足,无法满足有轨列车数据采集和传输要求的问题。同时,多端口传输模块进行端口扩展,而数据处理全部在数据处理模块中完成,保证整个系统的数据的同步性,增加系统的稳定性和处理效率。此外,数据处理模块采用实时操作系统,从而能够对接收到的数据进行快速高效的处理,并将数据处理后得到的实时运行参数快速输出,更好地保证系统的实时性和可靠性。
41.基于上述实施例,有轨电车车载控制器还包括隔离输入模块103、隔离输出模块104以及速度传输模块105;
42.隔离输入模块103的输出端与多端口传输模块101的输入端连接,用于采集列车安全信号和列车非安全信号;
43.隔离输出模块104的输入端与多端口传输模块101的输出端连接,用于将列车安全信号和列车非安全信号发送至列车自动控制系统;
44.速度传输模块105的输入端与多端口传输模块101的输出端连接,用于将实时运行参数发送至列车自动控制系统。
45.具体地,隔离输入模块103从列车自动控制系统采集列车安全信号和列车非安全信号,并将列车安全信号和列车非安全信号发送至多端口传输模块101,以使多端口传输模块101将列车安全信号和列车非安全信号发送至数据处理模块102。
46.数据处理模块102接收到列车安全信号和列车非安全信号后,会结合列车控制信息进行分析数据,生成实时运行参数,并将实时运行参数、列车安全信号和列车非安全信号发送至多端口传输模块101。
47.多端口传输模块101接收到上述数据后,将列车安全信号和列车非安全信号发送至隔离输出模块104,使隔离输出模块104将两个信号发送至列车自动控制系统,以及将实时运行参数(如列车速度信息)发送至速度传输模块105,使速度传输模块105将实时运行参数发送至列车自动控制系统。
48.基于上述任一实施例,隔离输入模块103包括40路隔离输入电路,隔离输出模块104包括24路隔离输出电路,速度传输模块105包括6路速度传输电路。
49.如图2所示,多端口传输模块将数据处理模块102的io口扩展到了70路(40路隔离输入电路 24路隔离输出电路 6路速度传输电路),其中,40路隔离输入电路用于将列车安全信号和列车非安全信号输入至多端口传输模块101,以通过多端口传输模块101将两个信号传入数据处理模块102,生成实时运行参数并发送至多端口传输模块101。多端口传输模块101接收到实时运行参数后,通过24路隔离输出电路将列车安全信号和列车非安全信号输出至列车自动控制系统,同时,通过6路速度传输电路将实时运行参数(如列车的速度信息)输出至列车自动控制系统。
50.本发明实施例提供的有轨电车车载控制器,采用多端口传输模块对数据处理模块的端口进行扩展,增加了接口数量,扩大了有轨电车车载控制器的采集量和输出量。
51.基于上述任一实施例,40路隔离输入电路中的16路输出的高电平电压为17v~24v,以及输出的低电平电压为0v~5v;40路隔离输入电路中的24路输出的高电平电压为110v,以及输出的低电平电压为0v~5v。
52.具体地,多端口传输模块101将数据处理模块102的io口扩展到了70路,其中24路io口为隔离输出电路(隔离输出模块104),实现湿节点输出;40路为隔离输入电路(隔离输
入模块103),其中16路电压17
‑
24v为高电平,0
‑
5v为低电平,其余24路为110v为高电平,0
‑
5v为低电平;6路为速度传输电路(速度传输模块105)。
53.本发明实施例提供的有轨电车车载控制器,采用多端口传输模块对数据处理模块的端口进行扩展,增加了接口数量,扩大了有轨电车车载控制器的采集量和输出量。
54.基于上述任一实施例,列车控制信息包括应答器信息、牵引制动信息、位置信息以及车地信息;
55.有轨电车车载控制器还包括第一通信模块106、第二通信模块107、第三通信模块108和第四通信模块109;
56.第一通信模块106的输出端与数据处理模块102的输入端连接,用于采集应答器信息;
57.第二通信模块107的输出端与数据处理模块102的输入端连接,用于采集牵引制动信息;
58.第三通信模块108的输出端与数据处理模块102的输入端连接,用于采集位置信息;
59.第四通信模块109的输出端与数据处理模块102的输入端连接,用于采集车地信息。
60.如图2所示,多端口传输模块101通过隔离输入模块103采集来自列车自动控制系统的列车安全信号和非安全信号,将采集到的列车安全信号和非安全信号传输给数据处理模块102;数据处理模块102通过第一通信模块106接收应答器信息,通过第二通信模块107接收牵引制动信息,通过第三通信模块106接收位置信息(如雷达信息和北斗/gps信息),通过第四通信模块109接收车地信息;数据处理模块102对采集到的上述信号与多端口传输模块101传输的列车安全信号和非安全信号进行分析处理后,生成实时运行参数,并将实时运行参数传输至多端口传输模块101,多端口传输模块101接收到实时运行参数后,通过隔离输出模块104和速度传输模块105传输至列车自动控制系统。
61.需要说明的是,有轨电车车载控制器可以包括2个第一通信模块,用于接收应答器信息;1个第二通信模块,用于与列车自动控制系统交互牵引制动信息;2个第三通信模块,用于雷达信息、北斗gps信息的采集和控制;1个第四通信模块,用于接收车地信息。
62.此外,第一通信模块可以为can通信模块,以通过can总线接收应答器信息,第二通信模块可以为mvb通信模块,以通过多功能车辆总线与列车自动控制系统交互牵引制动信息,第三通信模块可以为485模块,以通过串行总线采集位置信息(如雷达信息、北斗/gps信息),第四通信模块可以为以太网模块,以通过以太网进行车地通信,获取车地信息。
63.本发明实施例提供的有轨电车车载控制器,数据处理模块采用实时操作系统,对数据进行快速高效的处理,并在规定的时间内做出响应,将数据处理后的结果快速输出,更好地保证系统的实时性和可靠性;同时,采用多端口传输模块对单片机端口进行扩展,解决了单片机端口不足的问题;此外,多端口传输模块仅进行端口扩展,而数据处理全部在数据处理模块中完成,保证整个系统的数据的同步性,增加系统的稳定性和处理效率。
64.基于上述任一实施例,数据处理模块102为基于arm cortex
‑
m内核单片机tms570ls1227zwt的电路模块,多端口传输模块101为基于现场可编程门阵列芯片ep4ce10的电路模块。
65.具体地,采用现场可编程门阵列芯片ep4ce10对tms570ls1227zwt进行的io口进行扩展,扩展后的io口数量为70个。tms570ls1227zwt和ep4ce10之间通过emif总线进行数据传输。ep4ce10负责列车安全信号和列车非安全信号信息的采集,利用emif总线ep4ce10将采集到的数据传输给tms570ls1227zwt,tms570ls1227zwt通过多种总线实现对应答器信息、牵引制动信息、位置信息(如雷达信息、北斗/gps信息)和车地信息等信号的采集,tms570ls1227zwt对上述数据进行分析处理后,通过emif总线反馈给ep4ce10,利用ep4ce10控制列车的所有安全信号和非安全信号。
66.本发明实施例提供的有轨电车车载控制器,数据处理模块采用实时操作系统,对数据进行快速高效的处理,并在规定的时间内做出响应,将数据处理后的结果快速的输出,更好地保证系统的实时性和可靠性。
67.基于上述任一实施例,有轨电车车载控制器还包括隔离电源模块,隔离电源模块的输出端分别与多端口传输模块101的输入端和数据处理模块102的输入端连接。
68.具体地,如图2所示,隔离电源模块的输出端分别与多端口传输模块101的输入端和数据处理模块102的输入端连接。隔离电源模块的功率可以为10w,从而可以将电压由24v转为12v、5v和3.3v,为多端口传输模块101(ep4ce10)、数据处理模块102(tms570ls1227zwt)以及24路隔离输出模块供电。
69.基于上述任一实施例,实时操作系统为freertos实时操作系统。
70.具体地,freertos是一个迷你的实时操作系统内核,freertos实时操作系统作为一种嵌入式实时操作系统,可以更合理、更有效地利用cpu的资源,简化应用软件的设计,缩短系统开发时间,更好地保证系统的实时性和可靠性。
71.此外,实时操作系统在tms570ls1227zwt中运行,能够与嵌入式系统兼容使用,更好地保证系统的实时性、安全性和可靠性。
72.本发明实施例提供的有轨电车车载控制器,数据处理模块采用实时操作系统,对数据进行快速高效的处理,并在规定的时间内做出相应,将数据处理后的结果快速的输出,更好地保证系统的实时性和可靠性。
73.基于上述任一实施例,列车自动控制系统包括列车自动防护系统和列车自动驾驶系统。
74.具体地,列车自动控制系统(automatic train control,atc)是以技术手段对列车运行方向、运行间隔和运行速度进行控制,保证列车能够安全运行、提高运行效率的系统。
75.列车自动控制系统分为列车自动防护系统(automatic train protection,atp)、列车自动驾驶系统(automatic train operation,ato)。其中,atp能为列车超过规定速度时即自动制动,当车载设备接收地面限速信息,经信息处理后与实际速度比较,当列车实际速度超过限速后,由制动装置控制列车制动系统制动。atp自动检测列车实际运行位置,自动确定列车最大安全运行速度,连续不间断地实行速度监督,实现超速防护,自动监测列车运行间隔,以保证实现规定地行车间隔。ato辅助atp工作,接受来自atp的信息,其中有atp速度指令、列车实际速度和列车走行距离。此外还从列车自动监督系统和地面标志线圈接受到列车运行等级等信息。根据以上信息,ato通过牵引/制动线控制列车,使其维持在一个参考速度上运行;并在设有屏蔽门地站台准确停车。
76.基于上述任一实施例,一种有轨电车,其特征在于,包括如上任一实施例所述的有轨电车车载控制器。
77.具体地,由于上述实施例的有轨电车车载控制器中的多端口传输模块包括多个端口,实现了单片机的端口扩展,解决了现有技术中单片机端口不足,无法满足有轨列车数据采集和传输要求的问题。同时,多端口传输模块进行端口扩展,而数据处理全部在数据处理模块中完成,保证整个系统的数据的同步性,增加系统的稳定性和处理效率。此外,数据处理模块采用实时操作系统,从而能够对接收到的数据进行快速高效的处理,并将数据处理后得到的实时运行参数快速输出,更好地保证系统的实时性和可靠性,进而在有轨电车车载控制器运用于有轨电车上时,既能满足大量数据传输要求,而且可以避免将地铁列车的车载控制器应用于有轨电车造成性能过剩、成本较高的问题。
78.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

