1.本发明属于通信技术领域,特别涉及一种基于多径利用的北斗与超宽带室内外衔接处定位目标方法,可用于对城市环境下室内外衔接处点目标的定位。
背景技术:
2.在城市环境下,使用北斗卫星对室外目标进行定位时,由于建筑物表面或其他物体对信号的散射或反射,信号可以通过不同的路径到达导航接收机,接收机除了接收发射机直接传来的信号还会接收到经过遮挡物反射或者衍射的信号甚至他们之间互相干扰后的信号,产生多径效应。同样,超宽带信号在室内的通信中由于家具或者墙体的阻挡使得信号产生反射,导致接收机获得的信号不仅包括直射径传来的信号,还包括了室内的反射信号甚至反射信号之间互相干扰,使得接收的信号较直射信号产生相位的偏移,表现为信号的衰减和接收时间滞后。可见多径信号的存在,会严重降低定位性能。然而,多径信号中包含着低于直达信号的信号能量以及终端的位置信息,对这部分信号的抑制会导致能量和信息的损失,如果能够加以合理利用,就可以提升多径环境下的定位性能。
3.对于城市密集建筑物周边,单一北斗系统或超宽带定位系统存在对目标的定位精度较低甚至无法对目标直接进行定位的情况,若能将覆盖目标的卫星和超宽带基站的信息进行有效的融合,则可进一步提高衔接区域的定位精度。
4.传统的单一定位系统在位置信息的获取方面只依赖于单个接收机的解算信息,如北斗导航接收机只接收北斗信号,若覆盖的卫星数量不够或信号强度太低则无法定位,而超宽带定位系统只依赖于对超宽带基站信号的处理结果,远离基站的或被遮挡区域则无法定位。在城市密集建筑物周边,尤其是室内外衔接区域,有可能覆盖的卫星数量和超宽带基站数量都无法直接定位,或定位精度很差。但此时仍有少量卫星和基站的信息能够满足定位要求,若能够将不同定位系统的信息进行有效的融合,通过不同定位系统的定位方程组合,则可进一步提高衔接区域的定位精度。
5.近年来,专家们也提出很多改进方法。关维国在《传感器与微系统》期刊中发表的《基于北斗伪距差分与wifi的室内外融合定位方法》,其通过构建基于接收信号强度指示传播模型的wifi测距方程,利用泰勒算法实现精确定位。该方法虽可提高定位精度,但使用wifi定位需要打眼走线,部分环境施工较为困难。申请号为cn2019104866557的专利申请提出了《一种集成卫星导航与超宽带技术定位系统及其方法》,其通过设计多个模块,并利用模块之间的相关性来实现高压电缆的地上地下一体化定位。但该方法需要设计多个模块,较为复杂,使其使用范围受限。
技术实现要素:
6.本发明的目的在于针对上述现有方法的不足,提出一种基于多径利用的北斗与超宽带室内外衔接处定位目标方法以提高目标真实位置的检测准确性,同时降低成本和处理复杂度,扩大其适用范围。
7.为实现上述目的,本发明的技术方案包括如下:
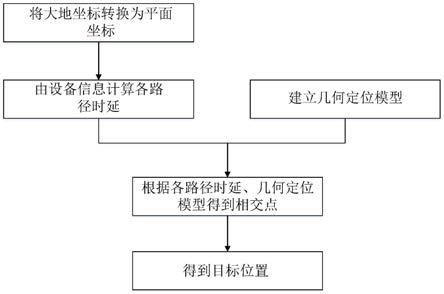
8.(1)将大地坐标转换为平面坐标:
9.先选定室内外衔接处一参考点p,精确测试其北斗位置信息,计算出对应的室内超宽带基站点的位置坐标,其中,该室内外衔接处的室外坐标系采用大地坐标系,室内坐标系采用平面坐标系;
10.在大地坐标系下,将参考点p的位置用大地经度l、大地纬度b和大地高度h表示,并采用高斯投影法将大地坐标转换为平面坐标(x,y),以实现坐标统一。
11.(2)获取不同信号的波达时间:
12.2a)根据北斗卫星发射直达波信号的时间t1和导航接收机接收直达波信号的时间t2,得到北斗卫星对应的直达波信号的波达时间τ
a
;
13.2b)根据超宽带基站发射直达波信号的时间t
l1
和导航接收机接收直达波信号的时间t
r1
,得到超宽带基站对应的直达波信号的波达时间τ
b
;
14.2c)根据超宽带基站发射一阶多径信号的时间t
l2
和导航接收机接收一阶多径信号的时间t
r2
,得到超宽带基站对应的一阶多径信号的波达时间τ
c
;
15.(3)建立城市环境下室内外衔接处目标几何定位模型:
16.3a)在平面坐标系中定义北斗卫星位置q1、超宽带基站位置q2和导航接收机位置a:
17.q1=[r
x1
,r
y1
],q2=[r
x2
,r
y2
],a=[a
x
,a
y
],
[0018]
其中,r
x1
是北斗卫星的横坐标,r
y1
是北斗卫星的纵坐标;r
x2
是超宽带基站的横坐标,r
y2
是超宽带基站的纵坐标;a
x
是导航接收机的横坐标,a
y
是导航接收机的纵坐标;
[0019]
3b)在平面坐标系中对反射轴信息进行初始化,即根据超宽带基站位置关于反射轴x轴的对称位置,得到基站关于反射轴x轴的虚拟超宽带基站的位置点p1:
[0020]
p1=[d
x1
,d
y1
];
[0021]
其中,d
x1
是虚拟超宽带基站的横坐标,d
y1
是虚拟超宽带基站的纵坐标。
[0022]
3c)根据北斗卫星位置q1、超带宽基站位置q2、虚拟超带宽基站位置p1和导航接收机位置a以及不同信号的波达时间τ
a
、τ
b
、τ
c
,建立数学模型表达式:
[0023][0024]
其中,式<1>是以北斗卫星q1的位置为圆心,以北斗卫星q1到导航接收机距离为半径的圆;
[0025]
式<2>是以超宽带基站q2的位置为圆心,以超带宽基站q2到导航接收机距离为半径的圆;
[0026]
式<3>是以虚拟超宽带基站p1的位置为圆心,以虚拟超带宽基站p1到导航接收机距离为半径的圆;
[0027]
c为电磁波在空间中的传播速度,[t
x
,t
y
]为要测量的目标位置;
[0028]
(4)将(2)中得到的北斗卫星对应的直达波信号的波达时间τ
a
、超宽带基站对应的直达波信号的波达时间τ
b
、超宽带基站对应的一阶多径信号的波达时间τ
c
分别带入3c)中建立的数学模型中进行联立求解,得到其三个几何模型即三个不同圆的相交点,该点为目标
的位置。
[0029]
本发明与现有技术相比,具有以下优点:
[0030]
1、检测位置准确度高。
[0031]
传统的单一定位系统在位置信息的获取方面只依赖于单个接收机的解算信息,在室内外衔接区域,覆盖的卫星数量和uwb基站数量不足,无法直接定位,或定位精度很差,但本发明是基于多径利用的北斗与超宽带融合定位方法,在定位时,可以联立足够数量的方程,准确地测出目标位置信息。
[0032]
2、模型简单、成本低。
[0033]
本发明是利用基于多径利用的北斗与超宽带融合定位方法,建立北斗与超宽带目标几何定位模型,将不同信号的波达时间带入北斗与超宽带目标几何定位模型中,得到相应的数学模型,由数学模型可解得目标的真实位置;该模型简单,成本较低。
[0034]
3、本发明利用点目标多径信息对点目标直接三维空间定位。
附图说明
[0035]
图1是本发明的实现流程图;
[0036]
图2是本发明在多径环境下北斗与超宽带融合定位的原理示意图;
[0037]
图3是本发明在设定的目标和环境参数下的仿真定位结果图。
具体实施方式
[0038]
参照图1,本发明的实现步骤如下:
[0039]
步骤1:选定室内外衔接地点,并进行坐标转换。
[0040]
先选定室内外衔接处一参考点p,精确测试其北斗位置信息,计算出对应的室内超宽带基站点的位置坐标,其中,该室内外衔接处的室外坐标系采用大地坐标系,室内坐标系采用平面坐标系;
[0041]
在大地坐标系下,将参考点p的位置用大地经度l、大地纬度b和大地高度h表示;
[0042]
采用高斯投影法,利用如下转换公式将大地坐标转换为平面坐标(x,y):
[0043][0044][0045]
式中,x为参考点p对应的维度,b’为参考点p对应的子午线弧长,n为参考点p对应的卯酉圈子午线半径,b为参考点p对应的经度,e'为椭圆的第二偏心率,l=l
‑
l0为精度差,l为大地经度,l0为3度带中央子午线的经度。
[0046]
步骤2:获取不同信号的波达时间。
[0047]
2.1)根据北斗卫星发射直达波信号的时间t1和导航接收机接收直达波信号的时间t2,得到北斗卫星对应的直达波信号的波达时间τ
a
,表示如下:
[0048]
τ
a
=t2‑
t1,
[0049]
式中,t1是北斗卫星信号发射直达波信号的时间,t2是导航接收机接收直达波信号的时间;
[0050]
2.2)根据超宽带基站发射直达波信号的时间t
l1
和导航接收机接收直达波信号的时间t
r1
,得到超宽带基站对应的直达波信号的波达时间τ
b
表示如下:
[0051]
τ
b
=t
r1
‑
t
l1
,
[0052]
式中,t
l1
是超宽带基站发射直达波信号的时间,t
r1
是导航接收机接收直达波信号的时间;
[0053]
2.3)根据超宽带基站发射一阶多径信号的时间t
l2
和导航接收机接收一阶多径信号的时间t
r2
,得到超宽带基站对应的一阶多径信号的波达时间τ
c
,表示如下:
[0054]
τ
c
=t
r2
‑
t
l2
,
[0055]
式中,t
l2
是超宽带基站发射直达波信号的时间,t
r2
是导航接收机接收一阶多径信号的时间。
[0056]
步骤3:建立城市环境下室内外衔接处目标几何定位模型。
[0057]
参照图2,定义北斗卫星和超宽带基站分别在q1点和q2点处,根据反射轴信息得到超宽带基站关于反射轴x轴对称的虚拟超宽带基站的位置p1;根据北斗卫星位置q1、超宽带基站位置q2和虚拟超宽带基站位置p1和不同信号的波达时间τ
a
、τ
b
、τ
c
,建立北斗与超宽带融合的目标几何定位模型,具体实现如下:
[0058]
3.1)在平面坐标系中定义位置q1、超带宽基站位置q2和导航接收机位置a:
[0059]
q1=[r
x1
,r
y1
],q2=[r
x2
,r
y2
],a=[a
x
,a
y
],
[0060]
其中,r
x1
是北斗卫星的横坐标,r
y1
是北斗卫星的纵坐标;r
x2
是超宽带基站的横坐标,r
y2
是超宽带基站的纵坐标;a
x
是导航接收机的横坐标,a
y
是导航接收机的纵坐标;
[0061]
3.2)在平面坐标系中对反射轴信息初始化,即根据超宽带基站位置关于反射轴x轴的对称位置,得到虚拟超带宽基站的位置点p1:
[0062]
p1=[d
x1
,d
y1
];
[0063]
其中,d
x1
是虚拟超宽带基站的横坐标,d
y1
是虚拟超宽带基站的纵坐标。
[0064]
3.3)根据北斗卫星位置q1、超带宽基站位置q2、虚拟超带宽基站p1和目标反射面之间的关系,得到不同信号的几何模型:
[0065]
3.3.1)对于北斗卫星发射的直达波信号的波达时间τ
a
,信号从北斗卫星的位置q1发射,沿路径q1a到达接收机的位置a,其几何图是以北斗卫星的位置q1点为球心,以q1a长度为半径的球体;
[0066]
3.3.2)对于超宽带基站发射的直达波信号的波达时间τ
b
,信号从超宽带基站的位置q2发射,沿路径q2a到达接收机的位置a,其几何图是以北斗卫星的位置q2点为球心,以q2a长度为半径的球体;
[0067]
3.3.3)对于超宽带基站发射的一阶多径信号的波达时间τ
c
,信号从超宽带基站q2发射,沿路径q2f1传播,经反射点f1发生反射后再沿路径f1a到达接收机a;
[0068]
由于超宽带基站的位置q2和虚拟超宽带基站p1关于反射轴x轴对称分布,可知信号从超宽带基站q2发射沿路径q2f1传播的路径长度与信号从虚拟超宽带基站p1发射沿路径p1f1传播的路径长度相等,即q2f1=p1f1。根据等式q2f1 f1a=p1f1 f1a=p1a,可将该信号传
播路径看成信号从虚拟超宽带基站p1发射,沿路径p1a到达接收机,其几何图是以p1点为圆心,以p1a长度为半径的圆;
[0069]
3.3.4)由上述τ
a
、τ
b
、τ
c
组成的几何模型,建立数学模型表达式:
[0070][0071]
其中,式<1>是以北斗卫星q1的位置为圆心,以北斗卫星到导航接收机的距离为半径的圆,是北斗卫星对应的直达波信号的几何模型;
[0072]
式<2>是以超带宽基站q2的位置为圆心,以超带宽基站q2到导航接收机的距离为半径的圆,是超宽带基站对应的直达波信号的几何模型;
[0073]
式<3>是以虚拟超宽带基站p1的位置为圆心,以虚拟超宽带基站p1到导航接收机的距离为半径的圆,是超宽带基站对应的一阶多径信号的几何模型;
[0074]
c为电磁波在空间中的传播速度,[t
x
,t
y
]为要测量的目标位置。
[0075]
步骤3:确定目标位置坐标。
[0076]
3.1)将北斗卫星对应的直达波信号波达时间τ
a
带入3.3.4)的数学模型表达式中,可以得到以t
x
、t
y
为未知参数,以北斗卫星的位置q1为球心,以北斗卫星到导航接收机的距离为半径的圆;
[0077]
3.2)将超宽带基站对应的直达波信号波达时间τ
b
带入3.3.4)的数学模型表达式中,可以得到以t
x
、t
y
为未知参数,以超宽带基站的位置q2为球心,以超宽带基站到导航接收机的距离为半径的圆;
[0078]
3.3)将虚拟超宽带基站对应的一阶多径信号波达时间τ
c
带入3.3.4)的数学模型表达式中,可以得到以t
x
、t
y
为未知参数,以虚拟超宽带基站的位置p1为球心,以虚拟超宽带基站到导航接收机的距离为半径的圆;
[0079]
将上述三个不同的圆联立求解,可解得目标位置的横坐标t
x
和纵坐标t
y
,即目标位置[t
x
,t
y
]。
[0080]
在本实例中,定义北斗卫星的坐标矢量为q1=[20000,20000],即r
x1
=20000,r
y1
=20000;定义超宽带基站的坐标矢量为q2=[100,100],即r
x2
=100,r
y2
=100;目标的坐标矢量为a=[2,2],即a
x
=2,a
y
=2;在反射轴沿x轴的情况下,可得虚拟超宽带基站p1的坐标矢量为p1=[100,
‑
100],即d
x1
=100,d
y1
=
‑
100。
[0081]
将τ
a
=9.4271e
‑
05s、c=3
×
108m/s、r
x1
=20000、r
y1
=20000带入3.3.4)的数学模型表达式中,得到以t
x
、t
y
为未知参数,以北斗卫星q1的位置为圆心,以北斗卫星q1到导航接收机的距离为半径的圆:
[0082]
(20000
‑
t
x
)2 (20000
‑
t
y
)2=(9.4271e
‑
05
×3×
108)2;
[0083]
将τ
b
=4.6198e
‑
07s、c=3
×
108m/s、r
x2
=100、r
y2
=100带入3.3.4)的数学模型表达式中,得到以t
x
、t
y
为未知参数,以超宽带基站q2的位置为圆心,以超宽带基站q2到导航接收机的距离为半径的圆:
[0084]
(100
‑
t
x
)2 (100
‑
t
y
)2=(4.6198e
‑
07
×3×
108)2;
[0085]
将τ
c
=4.7150e
‑
07s、c=3
×
108m/s、d
x1
=100、d
y1
=
‑
100带入3.3.4)的数学模型表
达式中,得到以t
x
、t
y
为未知参数,以虚拟超宽带基站p1的位置为圆心,以虚拟超宽带基站p1到导航接收机的距离为半径的圆:
[0086]
(100
‑
t
x
)2 (
‑
100
‑
t
y
)2=(4.7150e
‑
07
×3×
108)2;
[0087]
将上述三个不同的圆进行联立,可得:
[0088][0089]
对这三个方程的方程组进行联立求解,得到目标位置的横坐标t
x
、纵坐标t
y
即确定出目标的位置。
[0090]
本实例的效果可以通过以下仿真进一步说明:
[0091]
对本发明实施例的点目标位置进行十次仿真,结果如图3所示。其中:
[0092]
从图3中可以看出,第一次仿真目标位置为(2.11,2.14),第二次仿真目标位置为(2.25,2.22),第三次仿真目标位置为(2.25,2.18),第四次仿真目标位置为(2.15,2.38),第五次仿真目标位置为(2.25,2.38),第六次仿真目标位置为(2.25,2.38),第七次仿真目标位置为(2.18,2.40),第八次仿真目标位置为(2.30,2.40),第九次仿真目标位置为(2.15,2.40),第十次仿真目标位置为(2.30,2.30)。
[0093]
每次仿真的目标位置都十分接近理想目标位置(2,2),表明本发明不仅能对多径环境下室内外衔接处的点目标进行定位,而且还有很高的定位精度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

